Предлагаемое изобретение относится к области электронной техники и может быть использовано для преобразования непрерывного сигнала в частоту в устройствах с высокими требованиями к точности преобразования.
Известен способ частотно-импульсного преобразования непрерывного сигнала, реализованный в [1], основанный на формировании дополнительного сигнала путем интегрирования входного сигнала, компенсации дополнительного сигнала путем интегрирования калиброванного по уровню эталонного сигнала в течение времени от момента достижения дополнительным сигналом заданного значения до момента достижения им нуля.
Недостаток этого способа состоит в низкой точности преобразования и в нелинейной зависимости выходной частоты от входного сигнала.
Известен преобразователь напряжения в частоту, описание которого приведено в [1], содержащий последовательно соединенные интегратор, компаратор, одновибратор, охваченные отрицательной обратной связью на вход интегратора.
Недостаток известного устройства состоит в низкой точности преобразования и в нелинейной зависимости выходной частоты от входного сигнала.
Наиболее близким техническим решением к предлагаемому способу частотно-импульсного преобразования непрерывного сигнала является способ, реализованный в [2], включающий формирование дополнительного сигнала путем интегрирования входного сигнала, компенсацию дополнительного сигнала путем интегрирования калиброванного по уровню и длительности эталонного сигнала при достижении дополнительным сигналом первого заданного значения.
Недостаток этого способа состоит в том, что при большом диапазоне изменения входного сигнала не обеспечивается заданная высокая точность.
Известен интегральный преобразователь-прототип, описание которого приведено в [2], содержащий интегратор, первый и второй релейные элементы с гистерезисом, первый и второй управляемые стабилизаторы тока, включенные в цепи отрицательной обратной связи соответственно на первый и второй входы интегратора, третий вход которого соединен со входом интегрального преобразователя, а выход интегратора соединен со входом первого и второго релейных элементов с гистерезисом.
Недостаток известного устройства состоит в том, что при большом диапазоне изменения входного сигнала оно не обеспечивает заданной высокой точности.
Задача изобретения - повышение точности за счет формирования эталонного импульсного сигнала разной длительности, зависящей от величины входного сигнала.
Эта задача достигается тем, что способ частотно-импульсного преобразования непрерывного сигнала, включающий формирование дополнительного сигнала путем интегрирования входного сигнала, компенсацию дополнительного сигнала путем интегрирования калиброванного по уровню и длительности эталонного сигнала при достижении дополнительным сигналом первого заданного значения, отличается тем, что компенсацию дополнительного сигнала осуществляют эталонным сигналом, кратным по времени фиксированному интервалу Т0, непрерывно от момента достижения дополнительным сигналом первого заданного значения до момента достижения им второго заданного значения того же знака, а выходной сигнал формируют в виде отношения числа интервалов Т0 эталонного сигнала за промежуток времени между двумя соседними достижениями первого заданного значения к этому промежутку времени.
Интегральный преобразователь, содержащий интегратор, первый и второй релейные элементы с гистерезисом, первый и второй управляемые стабилизаторы тока, включенные в цепи отрицательной обратной связи соответственно на первый и второй входы интегратора, третий вход которого соединен со входом интегрального преобразователя, а выход интегратора соединен со входом первого и второго релейных элементов с гистерезисом, отличается тем, что в него дополнительно введены первый и второй элементы И, генератор, первый и второй D-триггеры, D-входы которых соединены соответственно с выходом первого и второго релейных элементов с гистерезисом, С-входы соединены между собой, выходом генератора и первыми входами первого и второго элементов И, выходы которых соединены соответственно с выходной шиной положительного и отрицательного сигнала, при этом второй вход первого элемента И соединен с выходом первого D-триггера и входом первого управляемого стабилизатора тока, второй вход второго элемента И соединен с выходом второго D-триггера и входом второго управляемого стабилизатора тока.
На чертеже приведена блок-схема интегрального преобразователя, реализующего предлагаемый способ. На этой схеме: 1 - вход интегрального преобразователя, 2 - интегратор, 3 - первый релейный элемент с гистерезисом, 4 - второй релейный элемент с гистерезисом, 5 - первый управляемый стабилизатор тока, 6 - второй управляемый стабилизатор тока, 7 - первый D-триггер, 8 - второй D-триггер, 9 - первый элемент И, 10 - второй элемент И, 11 - генератор, 12 - выходная шина положительного сигнала, 13 - выходная шина отрицательного сигнала.
В интегральном преобразователе первый и второй входы интегратора 2 соединены соответственно с выходом первого 5 и второго 6 управляемых стабилизаторов тока, вход интегрального преобразователя 1 соединен с третьим входом интегратора 2, выход которого соединен с входами первого 3 и второго 4 релейных элементов с гистерезисом, выходы которых соединены соответственно с D-входами первого 7 и второго 8 D-триггеров, С входы которых объединены между собой, выходом генератора 11 и первыми входами первого 9 и второго 10 элементов И, второй вход первого элемента И 9 соединен с выходом первого D-триггера 7 и входом первого управляемого стабилизатора тока 5, второй вход второго элемента И 10 соединен с выходом второго D-триггера 8 и входом первого управляемого стабилизатора тока 5, выход первого элемента И 9 подключен к выходной шине положительного сигнала 12, выход второго элемента И 10 подключен к выходной шине отрицательного сигнала 13.
Интегральный преобразователь работает следующим образом. Пусть непрерывный сигнал (входной ток) Iвх увеличивается от нуля. В этом случае выходной сигнал U интегратора 2 (дополнительный сигнал) начнет увеличиваться, при U = h2 срабатывает релейный элемент с гистерезисом 3 и его выходной сигнал Uр1=1 поступает на D-вход первого D-триггера 7. Импульсом с генератора 11 первый D-триггер 7 переводится по входу С в единичное состояние, его выходной сигнал Uт1=1 включает первый управляемый стабилизатор тока 5, который подключает ток обратной связи Iо.с (эталонный сигнал) к первому входу интегратора 2. Ток Iо.с компенсирует дополнительный сигнал U и выбирается из условия Iо.с>Iвх.макс, где Iвх.макс - максимально возможное значение входного тока. Так как Iо.с>Iвх, то выходной сигнал U интегратора 2 начнет уменьшаться до значения U= h1. В течение всего этого времени первый D-триггер 7 находится в единичном состоянии и его выходной сигнал, поступая на второй вход первого элемента И 9, открывает его для прохождения импульсов генератора 12 с выхода первого элемента И 9, выходные импульсы f+ которого поступают на выходную шину положительного сигнала 12. При U=h1 выключается первый релейный элемент с гистерезисом 3 и его выходной сигнал Uр1=0 переводит первый D-триггер 7 в нулевое состояние по входу С импульсом с генератора 11, после чего первый стабилизатор тока 5 выключается. Пусть Т1 - время нахождения первого D-триггера 7 в единичном состоянии, в течение которого включен первый стабилизатор тока 5. Тогда Т1=n1T0, где Т0 - период следования импульсов с генератора 11, n1 - число импульсов с генератора 11 за время Т1.
После выключения первого стабилизатора тока 5 выходной сигнал U интегратора 2 начнет увеличиваться и при U=h2 срабатывает первый релейный элемент с гистерезисом 3 и процесс формирования сигналов f+ будет продолжен аналогично уже описанному. Пусть Т2 - время, в течение которого сигнал U изменяется от h1 до h2. Тогда справедливо следующее соотношение
Полагая, что за время (Т1+Т2) входной сигнал остается неизменным, из (1) имеем
Iвх=Iо.сn1Т0/(Т1+Т2). (2)
Равенство (2) можно представить в виде
Iвх=Iо.сТ0f+, (3)
где f+=n1/(T1+Т2) (4)
- частота, соответствующая входному сигналу Iвх (выходной сигнал интегрального преобразователя).
При изменении знака Iвх (Iвх<0) выходной сигнал U интегратора 2 будет уменьшаться и при U=-h2 срабатывает второй релейный элемент с гистерезисом 4 и его выходной сигнал Uр2=1 переводит второй D-триггер 8 в единичное состояние по С-входу импульсом с генератора 11. При этом включается второй управляемый стабилизатор тока 6 и процесс повторяется аналогично уже описанному, формируя на выходе второго элемента И 10 выходные импульсы f_ на выходной шине отрицательного сигнала 13.
Эффект от использования предлагаемого изобретения состоит в повышении точности. Оценим точность предлагаемого изобретения. Как следует из (2), точность преобразования зависит от точности задания двух параметров: тока обратной связи Iо.с и интервалов T1 (от стабильности генератора 11). Однако в случае высокой частоты переключения тока обратной связи Iо.с существенным моментом, влияющим на точность преобразования, является быстродействие элементов, участвующих в формировании тока Iо.с в течение интервалов T1. В устройстве-прототипе эти интервалы всегда равны Т0. Пусть, например, входной ток изменяется в пределах от Iмин = 10 нА до Iмакс = 10 мА и значению Iмин соответствует частота 0,1 Гц, а значению Iмакс соответствует частота 100 кГц. В этом случае в устройстве-прототипе интервал Т0≤10 мкс. Если, например, по каким либо причинам (например, от температуры) произойдет изменение фронта в формировании фиксированного интервала Т0 на ΔТ=10 нc, то относительная погрешность δ1 преобразования будет равна ΔТ/Т0=0,001 на всем интервале преобразования, что соответствует 0,1%. В предлагаемом изобретении относительная погрешность преобразования δ2 оценивается в виде
δ2 = ΔT/T1 (5)
Выберем в предлагаемом изобретении h2=6 Iо.с T0, h1=Iо.с T0. При входном токе Iвх= 6 мА и Iо.с=12 мА T1=10 Т0. Погрешность преобразования δ2 предлагаемого изобретения будет равна согласно (4) 0,0001, что соответствует 0,01%. Таким образом, точность предлагаемого изобретения значительно выше точности известного решения. С увеличением входного сигнала относительная погрешность δ2 уменьшается, что непосредственно следует из (4) и имеет существенное положительное значение.
Предлагаемая совокупность признаков в рассмотренных автором решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень". В качестве элементов для реализации устройства могут быть использованы логические элементы И, триггеры любых серий, например серии 564, стандартные интеграторы, стабилизаторы тока, кварцевые генераторы.
Источники информации
1. Авторское свидетельство СССР 921080, кл. Н 03 К 13/20, от 24.07.81. Преобразователь напряжения в частоту.
2. Патент Российской Федерации 2138826, кл. G 01 R 19/252, от 29.09.99. Интегральный преобразователь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЧАСТОТНО-ИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА И ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199757C1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2194999C1 |
| ИНТЕГРАЛЬНЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2325664C2 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2002 |
|
RU2208796C1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2194997C1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2208797C1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2240568C1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2240569C1 |
| УСТРОЙСТВО ВЫБОРА СИГНАЛА | 2001 |
|
RU2208245C2 |
| СПОСОБ ЦИФРОВОЙ ФИЛЬТРАЦИИ СИГНАЛОВ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2000 |
|
RU2187883C2 |
Использование: для преобразования непрерывного сигнала в частоту с высокими требованиями к точности преобразования. Технический результат заключается в повышении точности преобразования входного сигнала и уменьшении относительной погрешности при его возрастании. Способ частотно-импульсного преобразования непрерывного сигнала основан на формировании дополнительного сигнала путем интегрирования входного сигнала и компенсации дополнительного сигнала путем интегрирования калиброванного по уровню и длительности эталонного сигнала от момента достижения дополнительным сигналом первого заданного значения до момента достижения им второго заданного значения такого же знака и формировании выходного частотно-импульсного сигнала по длительности компенсации дополнительного сигнала за промежуток времени между двумя соседними достижениями первого заданного значения. Интегральный преобразователь, реализующий предлагаемый способ, содержит интегратор, релейные элементы с гистерезисом, управляемые стабилизаторы тока, генератор, D-триггеры, элементы И. Формирование выходного частотно-импульсного сигнала осуществляется путем преобразования времени нахождения в единичном состоянии D-триггеров в частотно-импульсный сигнал. 2 с.п. ф-лы, 1 ил.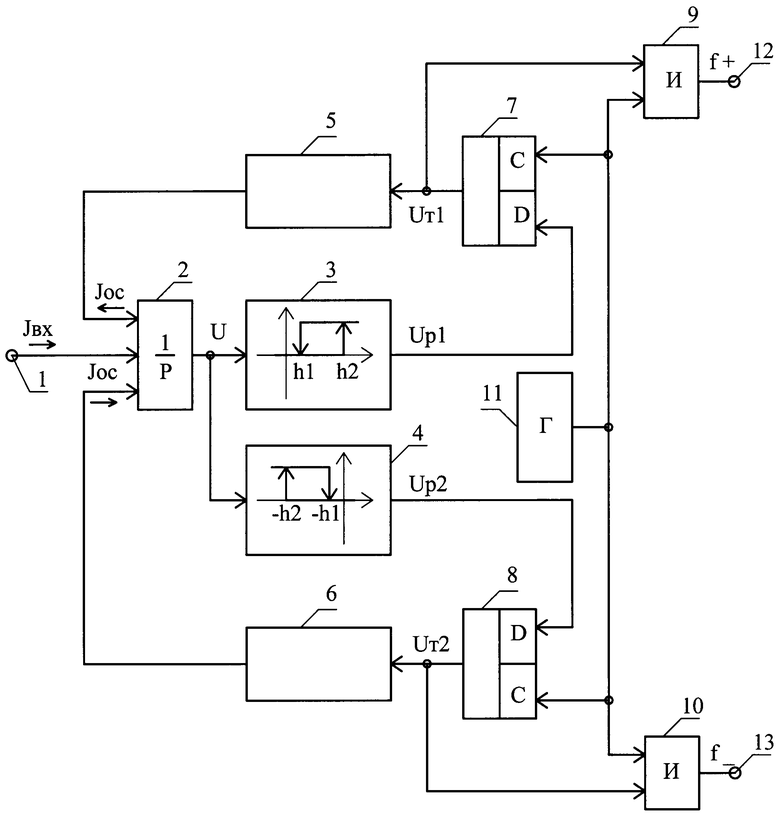
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2138826C1 |
| Преобразователь напряжения в частоту | 1980 |
|
SU921080A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЕ-ЧАСТОТА | 0 |
|
SU394938A1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1999 |
|
RU2160960C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ ВЕРТИКАЛЬНОГО ТИПА (ВАРИАНТЫ) | 2013 |
|
RU2506463C1 |
| US 4931921 A, 05.06.1990. | |||

