Изобретения относятся к измерительной технике, а именно к устройствам измерения углов поворота, основанным на использовании гироскопического эффекта, и может быть использовано для управления летательными аппаратами (ЛА).
Общеизвестны устройства измерения поворота ЛА, включающие определение величины угловой скорости разворота относительно вертикальной оси ЛА с ее последующим механическим преобразованием для индикации, а именно широко известные указатели поворота ЛА, содержащие двухстепенной гироскоп, измерительная ось которого совпадает с осью ЛА, относительно которой измеряется угловая скорость разворота, а рамка, нагруженная пружинами, соединена со стрелкой прибора через передаточный механизм [см. Браславский Д.А. и др. Авиационные приборы. М.: Машиностроение, 1964 г., с.477-479].
Известен электрический указатель поворота (ЭУП), содержащий двухстепенной гироскоп, ось прецессии которого (ось рамки) совпадает с продольной осью ЛА (осью X), а ось ротора гироскопа в режиме горизонтального полета направлена вдоль поперечной оси ЛА (оси Z). Рамка ротора гироскопа соединена с пневматическим демпфером и подпружинена, что создает противодействующий повороту рамки момент и позволяет измерить гироскопический момент. Поворот рамки через передаточный механизм передается на стрелку указателя. На панели указателя для обеспечения координированного поворота (разворот без скольжения) размещен указатель скольжения (креноскоп) [см. Браславский Д.А. и др. Авиационные приборы. М.: Машиностроение, 1964 г., с.484-486]. При постоянной скорости вращения гироскопа, линейных характеристиках пружин и передаточного механизма перемещение стрелки указателя пропорционально угловой скорости разворота ЛА относительно оси, перпендикулярной плоскости осей ротора гироскопа и рамки (оси У). Точность показаний ЭУП зависит от специальных требований по точности установки на приборной доске и расчетной скорости полета. При невыполнении требований в показания ЭУП вносится дополнительная погрешность. Поскольку ЭУП применяются как аварийные приборы, то в качестве источника питания используется бортовой источник постоянного тока, а в случае его отказа аккумуляторная батарея [см. И.Е.Бондарчук, В.И.Харин. Авиационное и радиоэлектронное оборудование самолета ЯК-40. М.: Транспорт, 1982 г., изд.2, с. 39-43,199-201] . Использование гиромотора постоянного тока со щеточно-коллекторным узлом требует стабилизации оборотов гиромотора, которая достигается установкой центробежного регулятора оборотов на роторе.
Недостатками указанного устройства являются низкая надежность и малый межремонтный ресурс. Использование гиромотора постоянного тока со щеточно-коллекторным узлом вызывает образование щеточной пыли, вызывающей загрязнение подшипников и заклинивание гиромотора, а возможные отказы регулятора оборотов снижают достоверность показаний. Применяемый пневматический демпфер сложен в изготовлении, имеет повышенный износ и склонен к затиранию, что также искажает показания указателя и снижает ресурс. Известные электромеханические преобразователи тока типа ПТ-12Ц, ПАГ-1Ф отличаются большими габаритами, массой на единицу отдаваемой мощности и низким коэффициентом полезного действия.
Наиболее близким по технической сущности к заявляемому изобретению является генератор трехфазного гармонического напряжения, описанный в авторском свидетельстве СССР 1341627, МКИ G 06 F 1/02, 1987 г., содержащий генератор импульсов, счетчик, первое и второе постоянные запоминающие устройства ПЗУ. Элементы И, триггеры, формирователь импульсов, первый и второй цифроаналоговые преобразователи ЦАП и сумматор. Однако это устройство сложно в изготовлении и требует предварительного программирования ПЗУ.
Перед изобретателями стояла задача повысить ресурс и надежность ЭУП при одновременном снижении массогабаритных характеристик индикатора и повышении точности измерения координированного разворота ЛА вне зависимости от угла наклона индикатора при установке на приборных досках с различными углами наклона.
Поставленная задача решается тем, что предложено устройство для измерения угла поворота летательного аппарата, содержащее двухстепенной гироскоп в виде датчика угловой скорости, подключенный к источнику питания, и стрелочный индикатор угла.
Новым в заявленном устройстве является то, что электрический выход датчика угловой скорости связан последовательно через усилитель и функциональный преобразователь со входом стрелочного индикатора, датчик угловой скорости и стрелочный индикатор размещены раздельно и связаны дистанционной передачей, а усилитель выполнен в виде множительного элемента, на второй вход которого подается электрический сигнал, пропорциональный скорости полета, при этом функциональный преобразователь реализует зависимость γ = arctgvω/g, где γ - угол поворота летательного аппарата, v - скорость полета летательного аппарата, ω - угловая скорость разворота, g - ускорение свободного падения.
Кроме того, источник питания содержит три входа напряжения переменного тока, преобразователь постоянного напряжения в трехфазное переменное и три выхода.
Заявляемый источник питания отличается тем, что в него введены элемент контроля наличия и правильности чередования фаз и реле, причем входы сети трехфазного переменного напряжения подключены к входам указанного элемента контроля, выход которого подключен к обмотке реле, а выходы источника питания подключены к входам сети трехфазного переменного напряжения через нормально-разомкнутые контакты реле и к соответствующим выходам преобразователя через нормально-замнутые контакты реле.
Технический результат заявляемых устройств заключается в обеспечении повышения надежности, точности измерений и получения достоверных показаний стрелочного индикатора, относительно измерительной оси независимо от скорости полета и наклона индикатора при установке его на приборной доске, за счет раздельного исполнения измерительного элемента - гироскопа (датчика угловой скорости) и индикатора (стрелочного указателя) и размещения гироскопа вблизи центра масс ЛА с совмещением его измерительной оси с вертикальной осью летательного аппарата, а стрелочного индикатора на приборной доске ЛА независимо от ее наклона при наличии дистанционной передачи электрического сигнала с выхода двухстепенного гироскопа на стрелочный индикатор. Использование датчика угловой скорости с резервированным питанием от бортовой сети постоянного тока позволяет уменьшить массогабаритные характеристики индикатора, увеличить межремонтный ресурс за счет отказа от использования гиромотора постоянного тока с регулятором оборотов и пневматическим демпфером. Введение усилителя, выполненного в виде множительного элемента, связанного другим входом с датчиком скорости полета ЛА, позволяет унифицировать ЭУП для широкого диапазона скоростей без каких-либо дополнительных требований и ограничений по его установке на борту ЛА. Конструктивное исполнение измерительного устройства совместно с источником питания обеспечивает эффективное резервирование с минимальным значением суммарной стоимости затрат и снижение эксплуатационных расходов, а также устраняет влияние дестабилизирующих факторов на точность измерений за счет введения элемента контроля наличия и правильности чередования фаз и реле. Универсальность, простота и удобство эксплуатации при изменении условий эксплуатации повышает надежность устройства и делает возможность оптимизировать комплект запасных элементов при минимальной или заданной стоимости ЗИПа.
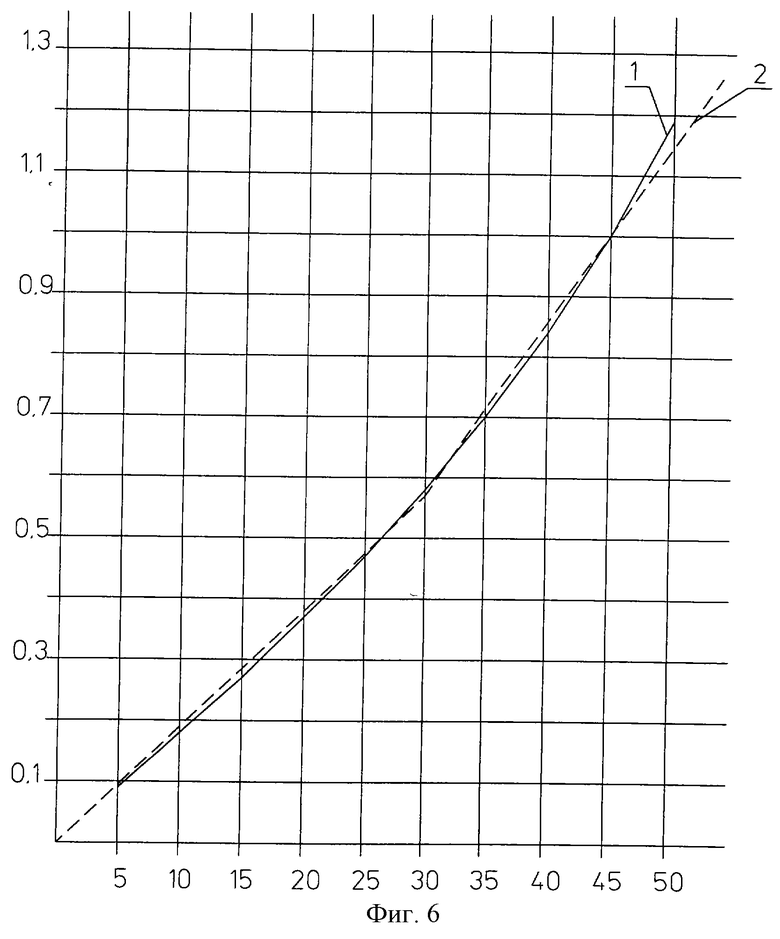
На фиг.1 представлена блок-схема устройства для измерения угла поворота летательного аппарата, на фиг.2 - источник питания с элементом контроля наличия и правильности чередования фаз и реле; на фиг.3 - схема преобразователя постоянного напряжения в трехфазное переменное; на фиг.4 - временная диаграмма работы преобразователя постоянного напряжения в переменное; на фиг.5 - пример реализации функционального преобразователя; на фиг.6 - график зависимости сигнала на выходе функционального преобразователя от угла индикации поворота (угла крена) ЛА.
Устройство для измерения угла поворота летательного аппарата реализовано так, что значение электрического сигнала угловой скорости разворота определяется вблизи центра масс вокруг вертикальной оси ЛА, которое затем формируется в виде линейно-изменяющегося напряжения постоянного тока в зависимости от значения электрического сигнала угловой скорости и преобразуется в постоянное напряжение, характеризуемое обратной функцией тангенса произведений значений электрических сигналов скорости ЛА, его угловой скорости и обратной константы ускорения свободного падения с последующей индикацией. При координированном развороте ЛА угол крена, угловая скорость разворота, скорость полета и ускорение свободного падения связаны зависимостью, описанной в кн. Браславский Д.А. и др. Авиационные приборы. М.: Машиностроение, 1964 г., с.483
tgγ = v•ω/γ, (1)
где γ - угол крена;
g - ускорение свободного падения;
v - скорость полета ЛА;
ω - угловая скорость разворота.
Показания стрелки по делениям шкалы индикатора соответствуют электрическим величинам значений текущего угла крена ЛА в соответствующем диапазоне скоростей, характерном для каждого вида ЛА. Для получения показаний на индикаторе с линейной шкалой электрический сигнал преобразуют в сигнал как функцию вида:
γ = arctgv•ω/γ, (2)
где γ - угол крена;
g - ускорение свободного падения;
v - скорость полета ЛА;
ω - угловая скорость разворота.
При этом сформированный электрический сигнал, пропорциональный скорости разворота ЛА, масштабируют в соответствии со значением величины электрического сигнала, пропорционального скорости полета ЛА.
Устройство содержит (фиг. 1) источник питания 1, подключенный к нему гироскоп, выполненный в виде датчика 2 угловой скорости, связанного своим выходом по постоянному току с первым входом усилителя 3 с регулируемым коэффициентом усиления, второй вход которого подключен к датчику сигнала, пропорционального скорости полета (не показан), или же на второй вход подают сигнал постоянной величины, соответствующий выбранной скорости полета. Выход усилителя 3 подключен к входу функционального преобразователя 4, выход которого через дистанционную передачу соединен со входом стрелочного индикатора 5.
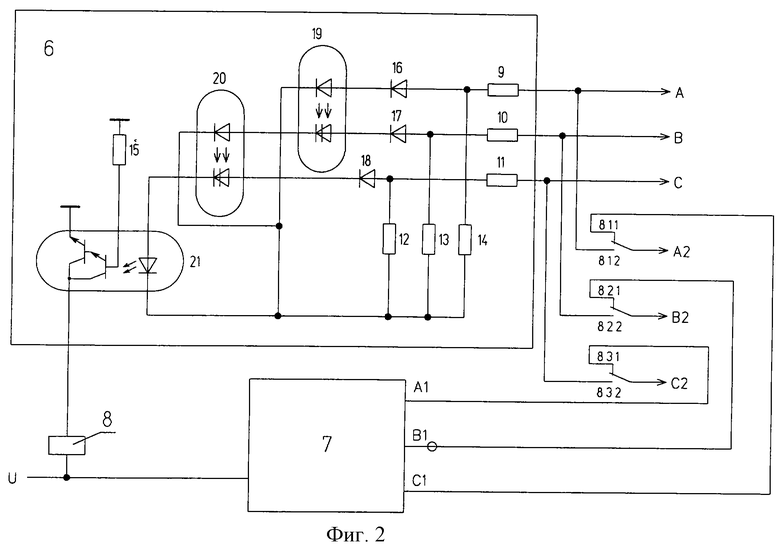
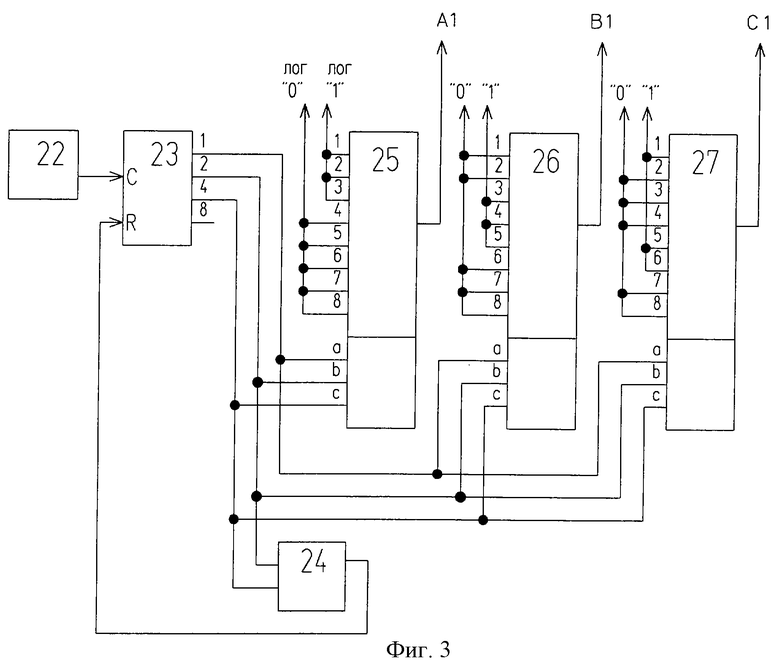
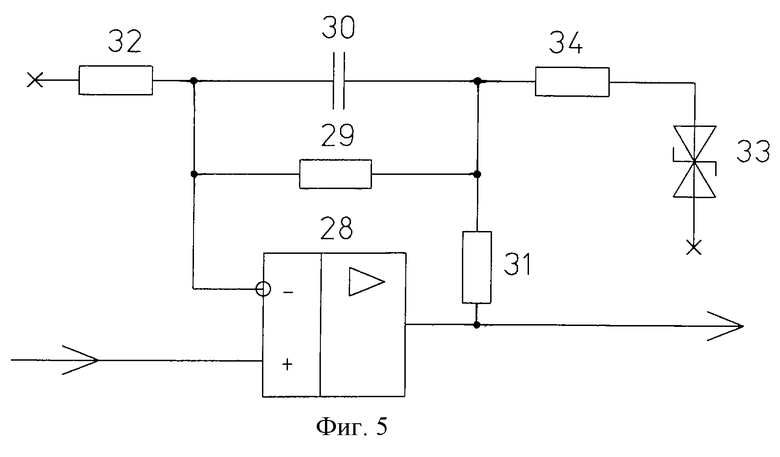
Источник питания 1 (фиг.2) содержит входы сети переменного трехфазного тока А, В, С, элемент 6 контроля наличия и правильности чередования фаз, преобразователь трехфазного напряжения 7, вход которого подключен к источнику постоянного напряжения (бортовой аккумуляторной батареи 27 В). Выводы А, В, С подключены к входам элемента 6 контроля наличия и правильности чередования фаз, выход которого подключен к обмотке реле 8. Выходы источника питания А2, В2, С2 соединены с выводами А, В, С через нормально-разомкнутые контакты реле 8.1.2, 8.2.2, 8.3.2, а с выводами преобразователя А1, B1, C1 через нормально-замкнутые контакты 8.1.1, 8.2.1, 8.3.1. Реле может быть заменено любыми другими коммутационными элементами. Элемент 6 контроля наличия и правильности чередования фаз и реле 8 содержит резисторы 9, 10, 11, 12, 13, 14, 15, диоды 16, 17, 18, оптоэлектронные элементы с тиристорным выходом 19, 20 и транзисторную оптопару 21 с подключенным к ней реле 8. Элемент 6 контроля наличия и правильности чередования фаз содержит также три делителя напряжения, каждый из которых состоит из двух резисторов 9, 14 фазы А, резисторов 10, 13 фазы В, резисторов 11, 12 фазы С, соединенных в искусственную нулевую точку. Пример реализации преобразователя 7 трехфазного переменного напряжения представлен на фиг.3, содержит генератор импульсов 22, связанный со счетным входом двоичного счетчика 23, соответствующие разрядные выходы которого подключены к входам, параллельно связаны через элемента И 24 со входом обнуления и с соответствующими адресными входами мультиплексоров 25, 26, 27, часть информационных входов которых соответствующим образом связана с логическим нулем, другая - с логической единицей, а их выходы являются выходами А1, В1, С1 фаз преобразователя. Выходы мультиплексоров 25, 26, 27 согласованы по напряжению и нагрузке. Питание преобразователя 7 на фиг.3 не показано. Временная диаграмма работы преобразователя 7 представлена на фиг. 4. Усилитель 3 с регулируемым коэффициентом выполнен в виде множительного устройства на микросхеме 525ПС2А 6КО.347.127-02ТУ. На фиг.5 представлен пример реализации функционального преобразователя 4, который содержит операционный усилитель (ОУ) 28, соединенный первым входом с выходом датчика 2 угловой скорости, а выходом с первым выводом резистора 29, связанного через параллельно соединенные конденсатор 30 и резистор 31 со вторым входом ОУ 28, который соединен через резистор 32 с общей точкой. Второй вывод резистора 29 соединен через стабилитрон 33 и резистор 34 также с общей точкой.
Устройство работает следующим образом. При подаче питания от бортовой сети ЛА датчик 2 угловой скорости формирует электрический сигнал постоянного тока, определяющего величину угловой скорости (ω) ЛА, который транслируют на первый вход усилителя 3, а на его второй вход подают сформированный электрический сигнал, пропорциональный скорости (v) ЛА, на которой производят разворот. Для существующего электрического указателя поворота ЭУП-53 - это 500 км/час. Электрический сигнал (величина, полученная в результате преобразования ω•v/g) с выхода усилителя 3 подают на вход функционального преобразователя 4 (фиг.5), которым реализуют зависимость (2), представленную графиком 1 на фиг.6, методом кусочно-линейной апроксимации - график 2. При реализации зависимости (2) методом кусочно-линейной апроксимации точкой изменения наклона характеристики принято значение угла крена, соответствующее 30o. Увеличение коэффициента усиления в определенной точке линейной характеристики ОУ 28, используемого в реализуемом устройстве функционального преобразователя 4 (фиг.5) в качестве повторителя, достигается за счет установки в цепи обратной связи дополнительных элементов 33 и 34. Двуханодный стабилитрон 33 обеспечивает напряжение (точку) перегиба выходной линейной характеристики ОУ. Подбором резистора 34 достигается необходимое увеличение коэффициента усиления за счет перераспределения токов, текущих по цепи 32, 31, 29 после достижения напряжения пробоя (стабилизации) двуханодного стабилитрона 33. Сигнал с выхода функционального преобразователя (описываемый функцией вида arctgω•v/g) 4 в соответствующем масштабе передают на вход стрелочного индикатора 5, стрелка которого при координированном развороте указывает угол крена ЛА. При отсутствии электрического сигнала угловой скорости (ω = 0) на выходе преобразователя 4 значение электрического сигнала близко к нулю и стрелка индикатора 5 указывает на отсутствие крена. В случае отказа бортовой сети переменного тока устройством контроля 6 (фиг.2) отказ локализуется следующим образом.
Диоды 16, 17, 18, соединенные с контролируемым трехфазным напряжением и подключенные соответственно к выходам делителей напряжения фаз А, В, С, отпирают поочередно, один раз за период напряжения сети. При соблюдении последовательности чередования фаз А, В, С положительная полуволна напряжения фазы А проходит через диод 16 и ток проходит через светоизлучатель тиристорного оптрона 19 к искусственной нулевой точке, открывает его фотоприемник, и тиристорный оптрон открыт. Положительная полуволна напряжения фазы В проходит через диод 17 и ток проходит через фотоприемник тиристорного оптрона 19 и светоизлучатель тиристорного оптрона 20 к искусственной нулевой точке, открывая фотоприемник тиристорного оптрона 20. Положительная полуволна напряжения фазы С проходит через диод 18 и ток через фотоприемник тиристорного оптрона 20 и сетоизлучатель транзисторной оптопары 21 приводит к срабатыванию транзисторной оптопары с реле 8, которым подключают источник питания 1. Напряжения с выводов А, В, С бортовой сети переменного тока поступают на входы элемента 6 контроля наличия и чередования фаз. При нормальной работе сети сигнал с выхода элемента 6 поступает на вход обмотки реле 8, реле срабатывает, его нормально-разомкнутые контакты 8.1.2, 8.2.2 и 8.3.2 замыкаются и питание на датчик угловой скорости 2 поступает с бортовой сети переменного тока. При исчезновении напряжения питания хотя бы по одной из фаз бортовой сети переменного тока или изменении порядка чередования фаз элемент 6 срабатывает, сигнал на обмотку реле не поступает, нормально-замкнутые контакты замыкаются и питание на датчик 2 угловой скорости поступает с преобразователя 7 (фиг.3).
При подаче питания генератор 22 выдает последовательность импульсов с заданной частотой, которые поступают на счетный вход двоичного счетчика 23. На выходах счетчика 23 формируется нарастающе четырехразрядное двоичное число, поступающее на адресные входы мультиплексоров 25, 26, 27. Мультиплексоры 25, 26, 27 согласно адресу подключают к своему выходу соответствующий информационный вход. При этом на информационные входы 1, 2, 3 мультиплексора 25, на информационные входы 3, 4, 5 мультиплексора 26 и на информационные входы 5, 6, 1 мультиплексора 27 подают логическую единицу, а на остальные информационные входы - логический нуль. Тогда, если счетчик 23 при поступлении импульсов с генератора 22 формирует на выходе последовательность двоичных чисел 000, 100, 010, 110, 001, 101, 011, то мультиплексоры 25, 26, 27 последовательно подключают к своему выходу информационные входы 1, 2, 3, 4, 5, 6. При появлении на выходе счетчика 23 двоичного числа 011 элемент И 24 выдает импульс, который, поступая на вход обнуления счетчика 23, приводит его в исходное состояние, формируя на выходах счетчика 23, а следовательно, и на входе обнуления, его через элемент И 24, нуль и цикл повторяется.
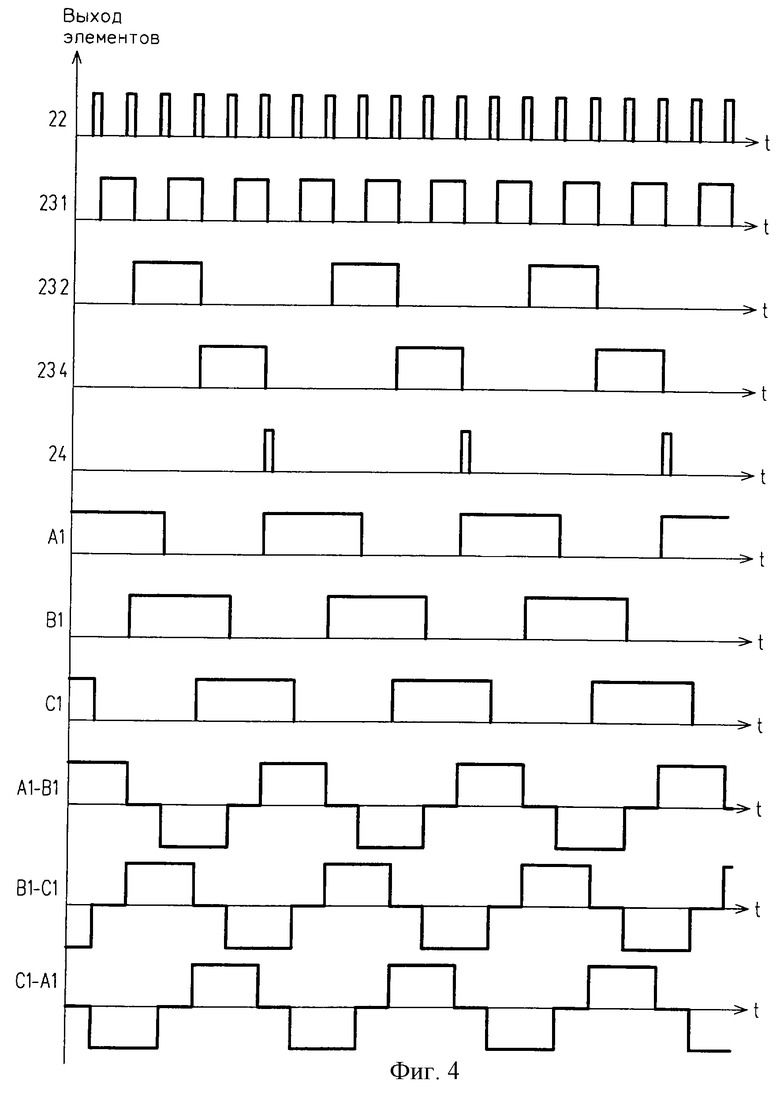
На фиг.4 представлена диаграмма состояния (работы) элементов преобразователя 7. 22 - выход генератора; 23 - выходы счетчика; А1.В1.С1 - выходы мультиплексоров 25, 26, 27 соответственно; А1-В1, В1-С1, С1-А1 - диаграмма межфазных напряжений преобразователя 7. На выходах мультиплексоров 25, 26, 27, а значит и на выходах А1, В1, С1 формируются импульсы напряжений строго определенной длительности с постоянным сдвигом начала каждого импульса в фазах на 120o относительно друг друга. Стабильность длительности импульсов и сдвига фаз определяется лишь стабильностью частоты генератора 22. При этом питание по переменному току датчика 2 угловой скорости осуществляется от преобразователя 7 и устройство работает так, как описано выше.
Проведенные испытания экспериментального образца показали работоспособность заявляемых устройства и источника питания, а также увеличение ресурса работы, повышение надежности и точности за счет замены механического съема сигнала с гироскопа и его передачи на индикатор, электрическим сигналом и его дистанционной передачей. Применение датчика угловой скорости с синхронным гиромотором переменного тока взамен гиромотора постоянного тока позволило исключить из конструкции узел регулятора оборотов, отказ которого приводит к искажению информации, щеточно-коллекторный узел, являющийся источником пыли и приводящий к заклиниванию гиромотора, пневматический демпфер, затирание которого приводит к искажению информации. Введение дистанционной передачи позволяет установить указатель поворота на приборную доску, имеющую любой наклон, и одновременно снизить массу индикатора, а введение множительного устройства позволяет использовать указатель поворота в широком диапазоне скоростей.
Заявляемые устройства могут быть использованы не только для ЛА, но и для любых других объектов, способных совершать координированные развороты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2000 |
|
RU2209459C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЧЕРЕДОВАНИЯ ФАЗ ТРЕХФАЗНОЙ СЕТИ | 1993 |
|
RU2050554C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2007 |
|
RU2337314C1 |
| ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1991 |
|
RU2014715C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ | 1992 |
|
RU2032209C1 |
| Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2803706C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| АВТОНОМНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1992 |
|
RU2110078C1 |
Устройство предназначено для использования при управлении летательными аппаратами. Устройство содержит двухстепенной гироскоп в виде датчика угловой скорости, источник питания и стрелочный индикатор угла. Выход датчика связан через усилитель и функциональный преобразователь с индикатором. Усилитель выполнен в виде множительного элемента, на вход которого подается сигнал, пропорциональный скорости полета. Функциональный преобразователь реализует зависимость угла поворота летательного аппарата от скорости полета и угловой скорости разворота. Источник питания содержит преобразователь постоянного напряжения в трехфазное переменное, элемент контроля наличия и правильности чередования фаз и реле. Обеспечивается повышение ресурса и надежности при одновременном снижении массогабаритных характеристик, а также повышение точности измерения разворота летательного аппарата вне зависимости от угла наклона индикатора. 2 с.п. ф-лы, 6 ил.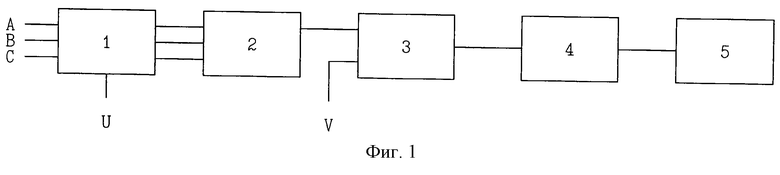
| БРАСЛАВСКИЙ Д.А | |||
| и др | |||
| Авиационные приборы | |||
| - М.: Машиностроение, 1964, с.483-486 | |||
| БРАСЛАВСКИЙ Д.А | |||
| и др | |||
| Авиационные приборы и автоматы | |||
| - М.: Машиностроение, 1978, с.264 и 151 | |||
| Генератор трехфазного гармонического напряжения | 1986 |
|
SU1341627A1 |
| GB 1301080 А, 29.12.1972 | |||
| GB 1176735 А, 07.01.1970. | |||
