Изобретение относится к области гироскопического приборостроения и может найти применение в системах автоматического управления, например, летательными аппаратами.
Известен блок демпфирующих гироскопов БДГ-30-1, (ОАО «Уральский приборостроительный завод», г. Екатеринбург), состоящий из трех ортогонально расположенных в корпусе датчиков угловых скоростей (ДУС) на базе двухстепенных гироскопов, по одному на каждую ось измерения.
Однако у блока БДГ-30-1 нет встроенного контроля нормальной работы гиромоторов, что снижает его надежность и, в конечном счете, точность формирования выходных сигналов.
Известен блок демпфирующих гироскопов БДГ-25, взятый за прототип (ОАО «Арзамасский приборостроительный завод им. П.И. Пландина», «Техническое описание и инструкция по эксплуатации блоков демпфирующих гироскопов БДГ-25 и БДГ-26»). Блок БДГ-25 состоит из двух ДУС на измерительный канал. Каждый ДУС представляет гиромотор, помещенный в рамку, на оси подвеса которой находится потенциометрический датчик угла, а для измерения гироскопического момента применена механическая пружина. В фазовые обмотки каждого гиромотора, соединенных в звезду, включены первичные обмотки импульсных трансформаторов, через которые гиромоторы подключаются к источнику трехфазного питания. Вторичные обмотки каждого импульсного трансформатора охватывают одновременно первичные обмотки и подключены к блоку контроля вращения гиромоторов (БКВГ). Функционально БКВГ состоит из двух входных транзисторов, включенных последовательно, к базам которых подключены вторичные обмотки импульсных трансформаторов. Если отклонения скоростей вращения гиромоторов находятся в заданном допуске, то оба входных транзистора будут открыты и конденсатор, включенный последовательно в цепь транзисторов начинает заряжаться, напряжение на конденсаторе растет по мере периодического открытия входных транзисторов. При достижении напряжением определенного уровня выходной транзистор открывается и, включенное в его коллекторную цепь исполнительное электромагнитное реле, срабатывает и его замыкающий контакт подключает питание к индикатору «Исправен». В противном случае этот блок выдает сигнал на второй индикатор «Не исправен» и данный БДГ отключается от системы управления летательным аппаратом. Дальнейшее функционирование системы управления летательным аппаратом по данному каналу будут обеспечивать правильно работающие БДГ.
Недостатком БДГ со встроенным БКВГ является конструктивная сложность настройки электронной части БКВГ и как следствие пониженная надежность его работы.
Технический результат, на достижение которого направлено изобретение, заключается в расширении функциональных возможностей БКВГ блока демпфирующих гироскопов и повышении надежности его работы.
Технический результат достигается тем, что в устройстве определения исправной работы гиромоторов блока демпфирующих гироскопов, состоящем из двух гироскопических датчиков угловых скоростей, у которых фазные обмотки первого и второго трехфазных гиромоторов подключены к источнику трехфазного напряжения через первичные обмотки первого и второго трехфазных импульсных трансформаторов, вторичные обмотки которых одновременно охватывают три первичные обмотки в каждом импульсном трансформаторе, новым является то, что устройство содержит первый и второй преобразователь сигналов и микроконтроллер, на первый и второй входные порты которого соответственно подключены выходы первого и второго преобразователей сигналов, входы которых соединены с вторичными обмотками первого и второго трехфазных импульсных трансформаторов, а к первому и второму выходным портам микроконтроллера подключены индикаторы исправной и неисправной работы, управляющие сигналы которыми программно формирует микроконтроллер путем временного анализа импульсов напряжения первого и второго преобразователей сигналов по формулам

где  время начала и окончания импульсов напряжения на выходе первого и второго преобразователей сигналов, определяемые по их передним и задним фронтам.
время начала и окончания импульсов напряжения на выходе первого и второго преобразователей сигналов, определяемые по их передним и задним фронтам.
Работа устройства поясняется чертежами, представленными на фиг.1 и фир.2.
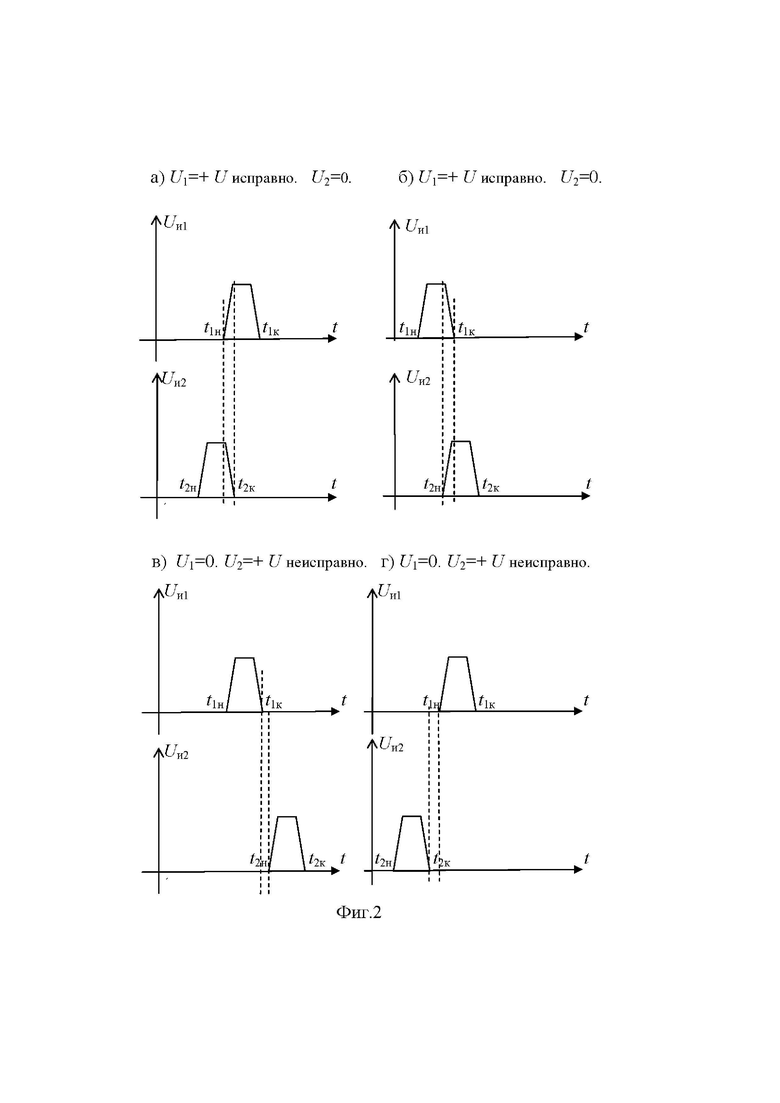
На фиг. 1 приведена функциональная схема устройства, на которой приняты следующие обозначения:
1. Первый трехфазный гиромотор.
2. Второй трехфазный гиромотор.
3. Трехфазный источник питания.
4. Первый импульсный трансформатор.
5. Второй импульсный трансформатор.
6. Первый преобразователь сигналов.
7. Второй преобразователь сигналов.
8. Микроконтроллер.
9. Индикатор исправной работы.
10. Индикатор неисправной работы.
 первичные обмотки первого импульсного трансформатора.
первичные обмотки первого импульсного трансформатора.
 первичные обмотки второго импульсного трансформатора.
первичные обмотки второго импульсного трансформатора.
 вторичная обмотка первого импульсного трансформатора.
вторичная обмотка первого импульсного трансформатора.
 вторичная обмотка второго импульсного трансформатора.
вторичная обмотка второго импульсного трансформатора.
 импульсные напряжения вторичных обмоток первого и второго импульсных трансформаторов
импульсные напряжения вторичных обмоток первого и второго импульсных трансформаторов
 импульсные напряжения первого и второго преобразователя сигналов.
импульсные напряжения первого и второго преобразователя сигналов.
 напряжения выходных портов микроконтроллера.
напряжения выходных портов микроконтроллера.
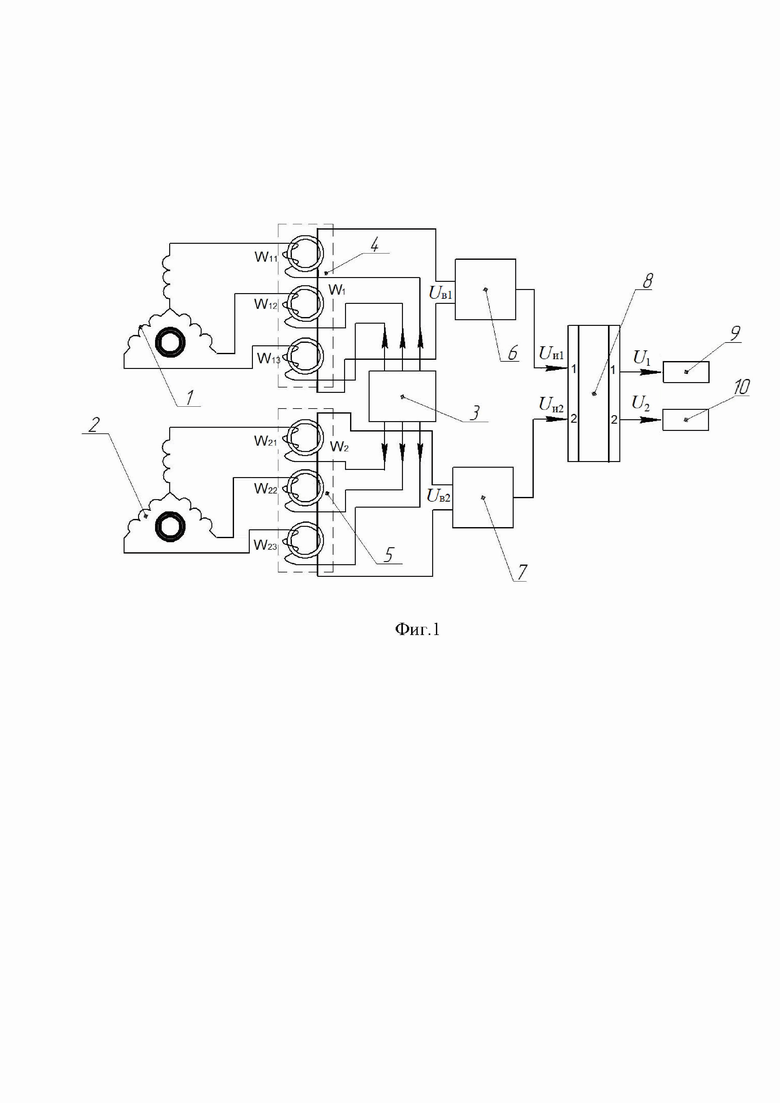
На фиг. 2 приведены варианты возможного взаимного расположения импульсов первого и второго преобразователей сигналов в увеличенном по времени масштабе, на которой приняты следующие обозначения:
 время начала и окончания импульсов напряжения первого преобразователя сигналов;
время начала и окончания импульсов напряжения первого преобразователя сигналов;
 время начала и окончания импульсов напряжения второго преобразователя сигналов.
время начала и окончания импульсов напряжения второго преобразователя сигналов.
В соответствии с функциональной схемой, представленной на фиг.1, БДГ состоит из первого 1 и второго 2 датчиков угловых скоростей, входные измерительные оси которых параллельны, трехфазного источника питания 3, подключенного к гиромоторам соответственно через первый 4 и второй 5 импульсные трансформаторы. При этом каждая из трех первичных обмоток  и
и  импульсных трансформаторов, намотанных на ферритовые кольца, включена последовательно с фазными обмотками гиромоторов, соединенных в звезду. Вторичные обмотки
импульсных трансформаторов, намотанных на ферритовые кольца, включена последовательно с фазными обмотками гиромоторов, соединенных в звезду. Вторичные обмотки  первого и второго импульсного трансформатора пронизывают одновременно соответствующие ферритовые кольца и подключаются к первому (6) и второму (7) преобразователям сигналов, выходы которых соответственно соединены с первым и вторым входными портами микроконтроллера (8). Первый (6) и второй (7) преобразователи сигналов нормируют импульсы
первого и второго импульсного трансформатора пронизывают одновременно соответствующие ферритовые кольца и подключаются к первому (6) и второму (7) преобразователям сигналов, выходы которых соответственно соединены с первым и вторым входными портами микроконтроллера (8). Первый (6) и второй (7) преобразователи сигналов нормируют импульсы  по амплитуде, приводя к уровню 3,3В, что необходимо для работы микроконтроллера (8). Одновременно обрезаются отрицательные импульсы и сохраняются привязки импульсов
по амплитуде, приводя к уровню 3,3В, что необходимо для работы микроконтроллера (8). Одновременно обрезаются отрицательные импульсы и сохраняются привязки импульсов  по времени. Первый и второй выходные порты микроконтроллера (8) соответственно подключены на индикатор исправной работы 9 и индикатор неисправной работы 10. Кроме того выходной сигнал второго выходного порта микроконтроллера (8) используется для отключения данного БДГ от системы управления (на фиг. 1 не показано).
по времени. Первый и второй выходные порты микроконтроллера (8) соответственно подключены на индикатор исправной работы 9 и индикатор неисправной работы 10. Кроме того выходной сигнал второго выходного порта микроконтроллера (8) используется для отключения данного БДГ от системы управления (на фиг. 1 не показано).
Работа устройства основана на взаимосвязи угловой скорости вращения ротора и фазовом сдвиге между напряжением и током в фазных обмотках первого и второго гиромоторов, а также на свойстве импульсного трансформатора формировать во вторичной обмотке при перемагничивании фазным током первичных обмоток импульсы малой длительности, которые в дальнейшем используются для определения соотношения угловых скоростей вращения гиромоторов. При этом импульсы формируются в моменты перехода фазовых токов гиромоторов через ноль и при переходе величины тока от отрицательного к положительному значению импульс напряжения будет положительным, а при переходе величины тока от положительного к отрицательному значению импульс напряжения будет отрицательным. С точки зрения физики импульсные трансформаторы такой конструкции осуществляют операцию дифференцирования и суммирования импульсов от трех фаз. Для возможности использования импульсов напряжения в микроконтроллере необходимо выполнить следующие действия: отсечь отрицательные импульсы, пронормировать по амплитуде, сохранив привязки по времени.
Главной задачей устройства является определить, если угловые скорости двух гиромоторов находятся в заданном диапазоне, то выдать информацию о нормальной работе, и, если угловые скорости двух гиромоторов не находится в заданном диапазоне (неважно у какого гиромотора скорость уменьшилась), то выдать информацию о неисправной работе блока БДГ и отключить его от системы управления.
Исправная работа устройства.
В этом режиме вращения двух гиромоторов отличие в угловых скоростях соответствует нормальной работе. При этом сдвиги фаз между фазовыми напряжениями и токами тоже будут находиться в допуске, о чем говорит взаимное положение импульсов напряжения  , представленное на фиг.2а и фиг.2б. При этом не имеет значения, у какого из гиромоторов сдвиг фаз увеличился или уменьшился. Главное, что площади импульсов перекрывали друг друга, о чем говорит взаимное положение во времени двух импульсов:
, представленное на фиг.2а и фиг.2б. При этом не имеет значения, у какого из гиромоторов сдвиг фаз увеличился или уменьшился. Главное, что площади импульсов перекрывали друг друга, о чем говорит взаимное положение во времени двух импульсов:
для фиг.2а  угловая скорость второго гиромотора замедлилась на допустимую величину;
угловая скорость второго гиромотора замедлилась на допустимую величину;
для фиг.2б  угловая скорость первого гиромотора замедлилась на допустимую величину.
угловая скорость первого гиромотора замедлилась на допустимую величину.
Неисправная работа устройства.
В этом режиме вращения двух гиромоторов отличие в угловых скоростях не соответствует нормальной работе. При этом сдвиги фаз между фазовыми напряжениями и токами тоже будут находиться вне допуска, о чем говорит взаимное положение импульсов напряжения , представленное на фиг.2в и фиг.2г. При этом не имеет значения, у какого из гиромоторов сдвиг фаз увеличился или уменьшился. Главное, что площади импульсов перестали перекрывать друг друга, о чем говорит взаимное положение во времени двух импульсов:
для фиг.2в  угловая скорость первого гиромотора замедлилась на недопустимую величину;
угловая скорость первого гиромотора замедлилась на недопустимую величину;
для фиг.2г  угловая скорость второго гиромотора замедлилась на недопустимую величину.
угловая скорость второго гиромотора замедлилась на недопустимую величину.
Анализ положения импульсов во времени программно осуществляет микроконтроллер (8). При этом сначала импульсы вторичных обмоток трансформаторов 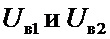 преобразуются первым (6) и вторым (7) преобразователями сигналов в импульсы нормированные по амплитуде с сохранением привязки по времени. Далее нормированные импульсы поступают на первый и второй входные порты микроконтроллера (8), которые являются портами прерываний и временные параметры обрабатываются программно, вырабатывая сигналы о пригодности БДГ для дальнейшего использования или отключения его от системы управления. Одновременно выдаются напряжения на индикаторы исправной (9) или неисправной работы (10):
преобразуются первым (6) и вторым (7) преобразователями сигналов в импульсы нормированные по амплитуде с сохранением привязки по времени. Далее нормированные импульсы поступают на первый и второй входные порты микроконтроллера (8), которые являются портами прерываний и временные параметры обрабатываются программно, вырабатывая сигналы о пригодности БДГ для дальнейшего использования или отключения его от системы управления. Одновременно выдаются напряжения на индикаторы исправной (9) или неисправной работы (10):

Предлагаемое устройство контроля исправной работы вращения роторов гиромоторов является универсальным и позволяет программно учитывать влияние различных факторов, например, температуры, на правильность принятия решения об исправной или неисправной работе гиромоторов в блоке БДГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2805375C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| Устройство для настройки выключателя коррекции, построенного на базе двух гироскопических датчиков угловых скоростей | 2024 |
|
RU2839681C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА И ИСТОЧНИК ПИТАНИЯ | 1997 |
|
RU2196302C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
Изобретение относится к гироскопической технике и может найти применение при построении систем контроля блоков демпфирующих гироскопов. Сущность заявленного изобретения состоит в следующем. Блок демпфирующих гироскопов состоит из двух гироскопических датчиков угловых скоростей, у которых фазные обмотки первого и второго трехфазных гиромоторов подключены к источнику трехфазного напряжения через первичные обмотки первого и второго трехфазных импульсных трансформаторов, вторичные обмотки которых одновременно охватывают три первичные обмотки в каждом импульсном трансформаторе и через первый и второй преобразователи сигналов подключены на первый и второй входные порты микроконтроллера. При этом к первому и второму выходным портам микроконтроллера подключены индикаторы исправности работы, управляющие сигналы которыми программно формирует микроконтроллер путем временного анализа импульсов напряжения первого и второго преобразователей сигналов. Достигаемый при реализации предложенного устройства технический результат заключается в расширении функциональных возможностей и повышении надежности устройства определения исправной работы гиромоторов. 2 ил.
Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов, состоящее из двух гироскопических датчиков угловых скоростей, у которых фазные обмотки первого и второго трехфазных гиромоторов подключены к источнику трехфазного напряжения через первичные обмотки первого и второго трехфазных импульсных трансформаторов, вторичные обмотки которых одновременно охватывают три первичные обмотки в каждом импульсном трансформаторе, отличающееся тем, что устройство содержит первый и второй преобразователи сигналов и микроконтроллер, на первый и второй входные порты которого соответственно подключены выходы первого и второго преобразователей сигналов, входы которых соединены с вторичными обмотками первого и второго трехфазных импульсных трансформаторов, а к первому и второму выходным портам микроконтроллера подключены индикаторы исправной и неисправной работы, управляющие сигналы которыми программно формирует микроконтроллер путем временного анализа импульсов напряжения первого и второго преобразователей сигналов по формулам

где 
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ В БЛОКЕ ГИРОСКОПОВ И ТРЕХОСНЫЙ БЛОК ДЕМПФИРУЮЩИХ ГИРОСКОПОВ | 2015 |
|
RU2598145C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| RU 2075042 C1, 10.03.1997 | |||
| US 0007280916 B2, 09.10.2007. | |||

