Изобретение относится к радионавигации и может использоваться для управления летательными аппаратами при вождении их по заданным траекториям, преимущественно для управления летательными аппаратами сельскохозяйственной авиации при проведении авиационно-химических работ.
Известна дальномерная система "Agri-fix" для вождения летательного аппарата по трассам, близким к прямолинейным [1]. В известной системе при использовании двух наземных станций возможно перемещение летательного аппарата над обрабатываемым участком лишь по гиперболическим траекториям. При этом расположение наземных станций относительно обрабатываемого участка зависит от требуемого направления полета. При наличии гиперболической сетки действительные траектории полета неэквидистантны и не прямолинейны. Кроме того, известная система неавтономна и не обеспечивает требуемую при проведении сельскохозяйственных работ точность выхода летательного аппарата в заданную точку после выполнения стандартного разворота.
Однако при проведении авиационно-химических работ требуется перемещение летательного аппарата по прямолинейным эквидистантным траекториям. Неточность выхода летательного аппарата в заданную точку нарушает равноудаленность трасс друг от друга, т.е. заданную ширину перехода, что приводит к снижению качества обработки: на обрабатываемых участках появляются полосы с завышенной и заниженной нормой внесения химикатов.
Известна также дальномерная система с изменением разности фаз на частоте модуляции, включающая размещенные на земле передатчик и приемник и размещенные на борту приемник, передатчик, генератор опорной частоты, индикатор отклонения, делитель частоты, блок переменной задержки, блок статистической обработки сигналов и блок управления [2].
Известная система обеспечивает вождение летательного аппарата по радиальным траекториям. Прямолинейность трасс с помощью известной системы может быть обеспечена лишь при достаточном удалении обрабатываемого участка от наземной станции и малых размерах участка. Направление перемещения одно: перпендикулярно линии наземная станция - летательный аппарат. Кроме того, информация о выходе в заданную точку после выполнения стандартного разворота с последующим полетом вдоль заданной траектории выдается пилоту по окончании стандартного разворота. Это вызывает необходимость выполнять пилотом эволюции, связанные с доворотом летательного аппарата, что может привести к погрешности выхода в заданную точку. Система не автономна, что является весьма существенным недостатком, так как требуется специальное обслуживание наземного ретранслятора и его периодическая проверка.
Наиболее близкой по технической сущности к предлагаемой является выбранная в качестве прототипа автономная навигационная система, включающая измеритель доплеровских частот, измеритель курса, вычислитель, индикатор [3].
Однако известная система обеспечивает движение летательного аппарата для приведения его к цели лишь по одной заданной траектории, при этом осуществляется счисление оставшегося пути и боковое отклонение от заданной линии курса. Вождение летательного аппарата по эквидистантным траекториям известная система не обеспечивает.
Предлагаемая система разработана в связи с возникшей необходимостью создания автономной системы для выполнения полетов при авиационно-химических работах, которая обеспечивала бы вождение летательного аппарата по эквидистантным прямолинейным траекториям и осуществляла высокочастотный выход в заданную точку после выполнения стандартного разворота на следующую трассу полета.
Для решения данной задачи в предлагаемой системе, включающей измеритель доплеровских частот, измеритель курса, вычислитель и индикатор, введены измеритель тангажа, мультиплексор, аналого-цифровой преобразователь, цифроаналоговый преобразователь и пульт управления, при этом три выхода измерителя доплеровских частот соединены с тремя входами мультиплексора, выход измерителя тангажа соединен с четвертым входом мультиплексора, выход измерителя курса соединен с пятым входом мультиплексора, выход которого соединен с входом аналого-цифрового преобразователя, выход которого соединен с первым входом вычислителя, выход которого соединен с входом цифроаналогового преобразователя, выход которого соединен с входом интегратора. Выход пульта управления соединен с вторым входом вычислителя, второй выход которого соединен с управляющим входом мультиплексора.
Вождение летательного аппарата по прямолинейным эквидистантным траекториям и высокоточный выход в заданную точку после выполнения стандартного разворота в предлагаемой системе обеспечивается за счет непрерывного вычисления и индикации бокового отклонения от заданной траектории полета.
На фиг. 1 представлена структурная схема системы; на фиг. 2 - схема выполнения полетов при проведении авиационно-химических работ; на фиг.3 - блок-схемы алгоритма работы системы.
Предлагаемая система содержит измеритель 1 доплеровских частот, измеритель 2 тангажа, измеритель 3 курса, последовательно соединенные мультиплексор 4, аналого-цифровой преобразователь 5, вычислитель 6, цифроаналоговый преобразователь 7 и индикатор 8, пульт управления 9, выход которого соединен с вторым входом вычислителя 6, при этом три выхода измерителя доплеровских частот соединены с первым, вторым и третьим входами мультиплексора 4, выход измерителя 2 тангажа соединен с четвертым входом мультиплексора 4, выход измерителя 3 курса соединен с пятым входом мультиплексора 4, второй выход вычислителя 6 соединен с управляющим входом мультиплексора 4.
Измеритель 1 доплеровских частот, измеритель 2 тангажа, измеритель 3 курса, мультиплексор 4, вычислитель 6 являются общеизвестными в вычислительной технике и технике измерений электрических и магнитных величин.
Измерители доплеровских частот широко известны и описаны в технической литературе (Радионавигационные системы летательных аппаратов. Под ред. П.С. Давыдова, - М.: Транспорт, 1980, с. 165). В предлагаемом устройстве используется измеритель доплеровских частот, содержащий трехлучевую антенную систему.
В качестве измерителя 2 тангажа и измерителя 3 курса можно использовать штатные приборы. Например, для измерения тангажа авиагоризонт АРГ-1 (Справочник пилота и штурмана гражданской авиации. Под ред. И.Ф. Васина, - М. : Транспорт, 1988, с. 175), для измерения курса - гидрополукомпас ГПК-52 (там же, с. 182).
Вычислитель 6 реализуется по известным правилам построения микроЭВМ на базе процессора, например, 8080, 8085 или 80 (Р.Токхайм. Микропроцессоры. М. : Энергоатомиздат, 1987, с. 9), а реализация вычислительного алгоритма осуществляется чисто программными средствами. В предпочтительном варианте использования вычислитель 6 построен на базе восьмиразрядного процессора 80 и содержит функциональные блоки, входящие в микроЭВМ: устройство ввода и вывода информации, оперативное запоминающее устройство, постоянное запоминающее устройство.
Мультиплексор 4 может быть выполнен как восьмиканальный аналоговый коммутатор (микросхема К 564 КП2), управляемый цифровым трехразрядным кодом.
В составе аналого-цифрового преобразователя 5 использована микросхема КР 1113 ПВ1, в составе цифроаналогового преобразователя 7 - микросхема К 572 ПА 1.
Система работает следующим образом.
Перед началом движения согласно блоку 1 на фиг. 3 посредством пульта управления 9 пилот включает вычислитель 6, при этом осуществляется запуск программы. Затем в вычислитель 6 нажатием соответствующей клавиши пульта управления 9 вводится ширина перехода P между эквидистантными трассами (фиг. 3, блок 2).
После начала полета пилот выводит летательный аппарат на край обрабатываемого участка AB ( фиг. 2), ориентируясь по местным предметам и штатным приборам.
Подав в точке A нажатием клавиши пульта управления 9 команду "Привязка" (фиг. 3, блок 3), пилот визуально ведет летательный аппарат по краю обрабатываемого участка до точки B. При этом по команде вычислителя 6 к выходу аналого-цифрового преобразователя 5 через мультиплексор 4 подключается измеритель 3 курса и производится измерение начального курсового угла βo (фиг. 3, блок 4). Таким образом осуществляется привязка системы к краю обрабатываемого участка
Параметр βo вводится в вычислитель 6 в форме электрического сигнала, преобразованного из аналоговой формы в цифровую в аналого-цифровом преобразователе 5.
При прохождении точки B (фиг.3, блок 5) пилот нажатием соответствующей клавиши пульта управления 9 подает команду "Работа" и выполняет стандартный разворот для перехода на следующую трассу полета СД (фиг. 2).
В режиме "Работа" высокочастотные колебания излучаются трехлучевой антенной системой измерителя 1 доплеровских частот в сторону земной поверхности. Из принятых сигналов по каждому из лучей антенны выделяются сигналы доплеровских частот FД1, FД2, FД3 и поступают на первый, второй и третий информационные входы мультиплексора 4, на четвертый и пятый входы которого от измерителя 2 тангажа и измерителя 3 курса поступает информация об измеряемых углах тангажа γi и курса βi (фиг. 3, блок 6).
Мультиплексор 4 по команде вычислителя 6 производит подключение к входу аналого-цифрового преобразователя 5 каналов измерения доплеровских частот (измеритель 1 доплеровских частот), углов тангажа γi (измеритель 2 тангажа) и курсовых углов βi (измеритель 3 курса). Причем в соответствии с программой вначале к входу аналого-цифрового преобразователя 5 подается один из измерительных каналов, и измерительный параметр поступает в вычислитель 6 в форме электрического сигнала, преобразованного из аналоговой формы в цифровую. В вычислителе 6 принятый сигнал нормируется, запоминается, после чего мультиплексором 4 подключается следующий канал и т.д.
Вычислитель 6 согласно блоку 7 на фиг. 3 производит расчет путевой скорости Wi и угла сноса αi путем совместного решения уравнений ,
,
где
Βo и Γo - установочные углы антенной системы измерителя доплеровских частот соответственно в вертикальной и горизонтальной плоскостях;
λ - длина волны.
Затем (фиг. 3, блок 8) в вычислителе 6 соответственно программе производится вычисление проекции центра масс летательного аппарата на направление OO' (фиг. 2) по формуле ,
,
где
ti - время цикла вычисления, определяемое быстродействием вычислителя и эффективностью программного обеспечения (в проведенном эксперименте ti = 0,068 с), и дальнейшее вычисление согласно блоку 9 на фиг. 3 бокового отклонения летательного аппарата от выбранной трассы полета
Si= So+ΔSi, ,
где
Sо = P - заданная величина перехода (вводится в вычислитель 6 посредством пульта управления 9).
Причем приращения ΔSi влево по полету берутся со знаком "плюс", вправо - "минус".
Результаты вычислений бокового отклонения от выбранной трассы полета Si (фиг. 3, блок 10) выводятся через порты интерфейса вычислителя 6 на вход индикатора 8 (фиг. 1).
Равенство нулю величины Si, т.е. нулевое положение индикатора 8, означает, что центр масс летательного аппарата проецируется в точку C (фиг. 2) и соответствует положению летательного аппарата на вновь выбранной трассе полета.
Полет по трассе СД осуществляется по индикатору 8, который указывает пилоту величину центра масс летательного аппарат от выбранной трассы полета. Ориентируясь по величине и знаку бокового отклонения Si, пилот управляет движением летательного аппарата так, чтобы величина Si была равна нулю.
При пролете точки D (фиг. 2) вновь выполняется стандартный разворот для перехода на следующую трассу полета и т.д.
Таким образом, использование автономной системы обеспечивает вождение летательного аппарата по прямолинейным эквидистантным траекториям и за счет непрерывно поступающей пилоту информации об отклонении летательного аппарата от выбранной трассы полета обеспечивает точность выхода летательного аппарата в заданную точку после выполнения стандартного разворота ± 1 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕРНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1990 |
|
RU2028005C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
Использование: в радионавигации для управления летательным аппаратом (ЛА) сельскохозяйственной авиации при проведении авиационно-химических работ. Сущность: система содержит измеритель доплеровских частот с трехлучевой антенной системой, измеритель тангажа, измеритель курса, мультиплексор, аналого-цифровой преобразователь, вычислитель, цифроаналоговый преобразователь, пульт управления и индикатор. В соответствии с измеренными значениями доплеровских частот, углов тангажа и курсовых углов осуществляется расчет проекции центра масс на определенное направление и последующее вычисление отклонения величины центра масс ЛА от заданной траектории. Это обеспечивает высокоточный выход ЛА в заданную точку при выполнении стандартного разворота и прямолинейность и эквидистантность траекторий полета ЛА за счет непрерывной индикации отклонения ЛА от заданной траектории. 3 ил.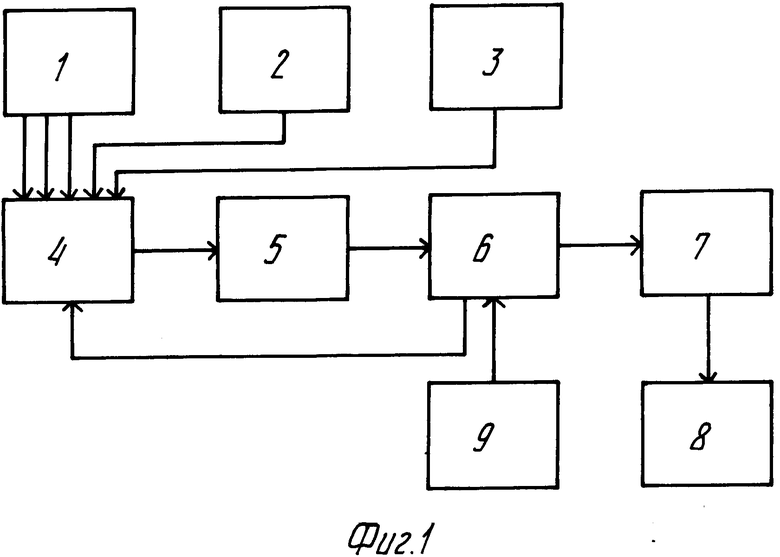
Автономная система для вождения летательного аппарата по заданным траекториям, содержащая измеритель доплеровских частот, измеритель курса, вычислитель и индикатор, отличающаяся тем, что в нее введены измеритель тангажа, мультиплексор, аналого-цифровой преобразователь, цифроаналоговый преобразователь и пульт управления, при этом три выхода измерителя доплеровских частот соединены с первым, вторым и третьим входами мультиплексора, выход измерителя тангажа соединен с четвертым входом мультиплексора, выход измерителя курса соединен с пятым входом мультиплексора, выход которого соединен с входом аналого-цифрового преобразователя, выход которого соединен с входом вычислителя, выход которого соединен с входом цифроаналогового преобразователя, выход которого соединен с входом индикатора, выход пульта управления соединен с вторым входом вычислителя, второй выход которого соединен с управляющим входом мультиплексора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дальномерная система с измерением разности фаз на частоте модуляции | 1976 |
|
SU949570A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Виницкий А.С | |||
| Автономные радиосистемы | |||
| - М.: Радио и связь, 1986, с.254. | |||
