Изобретение относится к области гироскопии и может быть использовано в системах управления движением, например космических и других летательных аппаратов.
Известны механические одноосные и двухосные гироскопические измерители угловых скоростей с электрической пружиной (1). Применение того или иного типа гироскопического измерителя обусловлено, в частности, диапазоном угловых скоростей подвижного объекта, а также требуемой точностью измерений.
Наиболее близким к предлагаемому является двухосный гироскопический измеритель угловых скоростей, содержащий гироузел, установленный в кардановом подвесе, с датчиками углов и моментов по обеим осям, усилители коррекции, включенные в цепи датчиков углов-датчиков моментов по перекрестным осям, и блок питания гиромотора (2).
В зависимости от величины выбранных электромеханических параметров: кинетического момента, коэффициента демпфирования, крутизны датчика моментов и т. д. такой гироскоп может успешно функционировать лишь в одном из требуемых режимов работы: либо в расширенном (грубом), либо в узком (точном).
Технический результат изобретения - способность функционировать в обоих диапазонах измерений последовательно и обеспечение требуемой точности в штатном режиме работы подвижного объекта.
Указанный результат достигается путем введения в двухосный гироскопический измеритель угловых скоростей с электрической пружиной дополнительного электронного блока формирования управляющего сигнала и ключа, положение которого определяется наличием или отсутствием тока в катушке реле, связанной с выходом задающего устройства, например ЭВМ, и обусловленным временной циклограммой работы подвижного объекта, причем вход электронного блока соединен с генератором опорной частоты, блоком стабилизаторов питания и поочередно с одним из контактов ключа, а выход - с преобразователем трехфазного напряжения.
Электронный блок может быть выполнен в виде логического устройства с переменным коэффициентом деления, содержащего делители частоты, схему совпадения и инвертор.
На фиг. 1 показана функциональная схема измерителя с дополнительным электронным блоком и ключом, где 1 - ротор гиромотора в подшипниках, 2 - полуось и опора внутренней рамки карданова подвеса, 3 - полуось и опора наружной рамки карданова подвеса, 4 - внутренняя рамка карданова подвеса, 5 - наружная рамка карданова подвеса, 6, 7 - датчики углов по внутренней и наружной осям карданова подвеса, 8,9 - датчики моментов по внутренней и наружной осям карданова подвеса, 10, 11 - усилители коррекции, 12 - преобразователь трехфазного напряжения, 13 - генератор опорной частоты, 14 - блок стабилизаторов напряжения, 15 - дополнительный электронный блок с переменным коэффициентом деления, 16 - ключ, 17 - обмотка реле, 18 - выход задающего устройства, 19 - упор, 20 - ограничительное кольцо, 21 - корпус.
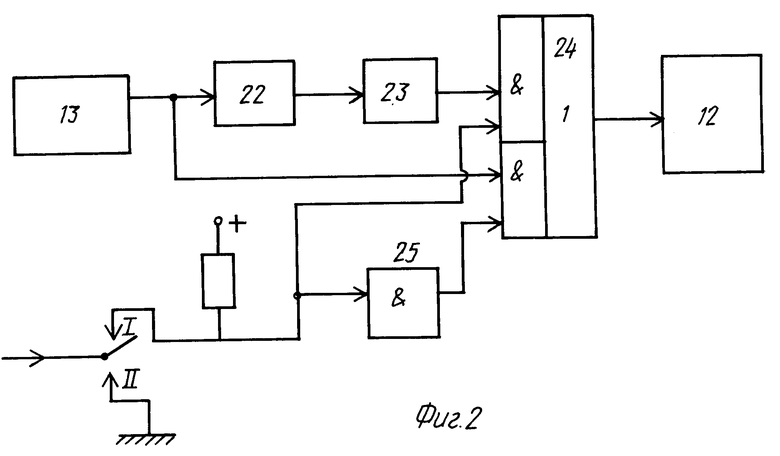
На фиг. 2 представлена блок-схема возможного исполнения электронного блока формирования сигнала в виде логического устройства с переменным коэффициентом деления, где обозначено 22 - делитель частоты, 23 - делитель частоты, 24 - схема совпадения, 25 - инвертор.
Гироскопический измеритель содержит гиромотор 1 в кожухе, установленном в кардановом подвесе - с внутренней рамкой 4, имеющей полуоси и опоры 2, и наружной рамкой 5, имеющей полуоси и опоры 3, датчики углов 6, 7 по внутренней и наружной осям карданова подвеса, датчики моментов 8, 9 по внутренней и наружной осям карданова подвеса, усилители коррекции 10, 11, включенные в цепи датчиков углов-датчиков моментов по перекрестным осям, преобразователь трехфазного напряжения 12, генератор опорной частоты 13, блок стабилизаторов напряжения 14. Кроме того, в него дополнительно введены электронный блок формирования управляющего сигнала 15 с переменным коэффициентом деления и ключ-реле, причем вход электронного блока соединен с генератором опорной частоты, блоком стабилизаторов питания и ключом, а выход - с преобразователем трехфазного напряжения, обмотка реле соединена с выходом задающего устройства, например ЭВМ.
Электронный блок формирования управляющего сигнала может быть выполнен в виде логического устройства с переменным коэффициентом деления, содержащего делители частоты, схему совпадения и инвертор. Углы поворота гироузла (ротора 1 с внутренней рамкой 4) относительно осей карданова подвеса при разомкнутых цепях электрических пружин ограничены рабочей зоной гироскопа, образуемой разностью радиусов упора 19, жестко закрепленного в корпусе 21 гироскопа, и ограничительного кольца 20, закрепленного на гироузле соосно вектору кинетического момента при его положении, соответствующем нулевым сигналам с датчиков углов. Рабочая зона гироскопа составляет приблизительно ± (11...18) угл. мин.
Зона линейности выходной характеристики гироскопического измерителя угловых скоростей при включенных электрических пружинах определяется током насыщения усилителей коррекции и составляет для различного типа усилителей (7.. .20) угл. с, т.е. незначительную часть рабочей зоны гироскопа.
Датчик углов могу быть выбраны, например, трансформаторного типа с перемещающейся обмоткой, а датчики моментов - магнитоэлектрического типа.
Работа двухосного гироскопического измерителя угловых скоростей осуществляется следующим образом.
В исходном положении вектор кинетического момента  гироскопа перпендикулярен осям карданова подвеса, датчики углов 6, 7 установлены в нулевое положение и управляющие сигналы с усилителем 10, 11 на датчики моментов 8, 9 нулевые. При действии возмущающих вредных моментов, например по оси Y, возникает прецессия гироскопа по оси Z с датчика угла 6 через усилитель 10 поступает управляющий сигнал на датчик момента 9, который компенсирует вредный момент: пока он действует, гироскоп остается отклоненным относительно оси 2 на некоторый угол, соответствующий погрешности измерителя. При угловых поворотах подвижного объекта в инерциальном пространстве гироскоп с расчетным запаздыванием отслеживает эти повороты, т.е. на выходе датчиков угла 6 и 7 содержится информация о величине проекций абсолютной угловой скорости изделия на связанные с ним оси (1, с. 78-81). В расширенном диапазоне измерения (в режиме демпфирования колебаний подвижного объекта) в соответствии с временной циклограммой, заложенной в ЭВМ, при подаче напряжения на обмотку реле 17, ключ 16 находится в положении 1 и трехфазный переменный ток пониженной частоты f1 (и пониженного напряжения) поступает на обмотки гиромотора 1 через упругие токоподводы от генератора опорной частоты, блок стабилизаторов напряжения, электронный блок формирования сигнала, преобразователь трехфазного напряжения.
гироскопа перпендикулярен осям карданова подвеса, датчики углов 6, 7 установлены в нулевое положение и управляющие сигналы с усилителем 10, 11 на датчики моментов 8, 9 нулевые. При действии возмущающих вредных моментов, например по оси Y, возникает прецессия гироскопа по оси Z с датчика угла 6 через усилитель 10 поступает управляющий сигнал на датчик момента 9, который компенсирует вредный момент: пока он действует, гироскоп остается отклоненным относительно оси 2 на некоторый угол, соответствующий погрешности измерителя. При угловых поворотах подвижного объекта в инерциальном пространстве гироскоп с расчетным запаздыванием отслеживает эти повороты, т.е. на выходе датчиков угла 6 и 7 содержится информация о величине проекций абсолютной угловой скорости изделия на связанные с ним оси (1, с. 78-81). В расширенном диапазоне измерения (в режиме демпфирования колебаний подвижного объекта) в соответствии с временной циклограммой, заложенной в ЭВМ, при подаче напряжения на обмотку реле 17, ключ 16 находится в положении 1 и трехфазный переменный ток пониженной частоты f1 (и пониженного напряжения) поступает на обмотки гиромотора 1 через упругие токоподводы от генератора опорной частоты, блок стабилизаторов напряжения, электронный блок формирования сигнала, преобразователь трехфазного напряжения.
В штатном режиме работы изделия обмотка реле 17 обесточена и ключ 16 находится в положении 11. При этом на гиромотор подается сначала повышенное напряжение трехфазного переменного тока частотой f2, с помощью которого осуществляется форсированный разгон гиромотора до номинальных рабочих оборотов, а затем номинальное напряжение питания частотой f2 для поддержания рабочих оборотов.
Электронный блок формирования сигнала работает следующим образом (фиг. 2).
В положении 1 ключа 16 сигнал от генератора опорной частоты поступает на схему совпадения через делители 22 и 23, в положении 11 - непосредственно на схему совпадения, т. е. логическая схема управляется через инвертор посредством ключа 16.
Приведем числовой пример, иллюстрирующий реальность и работоспособность предложенного устройства.
Пусть диапазон угловых скоростей подвижного объекта в расширенном (грубом) диапазоне измерений составляет ≠ 3o/с, в узком (точном) диапазоне ± 0,5o/с. При этом в расширенном диапазоне допускается ухудшение точностных параметров, установленных для узкого диапазона.
Разбросы систематических значений собственных уходов гироскопов, не зависящих от ускорений, от запуска к запуску относительно паспортизованных значений в течение всего срока службы подвижного объекта, составляющего 5 лет, не должны превышать 0,01o/ч по всем осям. Нестабильность систематических уходов гироскопов, измеряемых как средние значения за интервал времени 1 ч не должна превышать 0,05o/ч. Нестабильности систематических уходов гироскопов, измеренных как средние значения за интервал времени 1 с в течение одного непрерывного 24-часового запуска по всем осям, не должны превышать 0,1o/ч.
В гироскопе используется синхронный гистерезисный двигатель, обмотки которого в номинальном режиме защитываются трехфазным переменным током частотой f = 800 Гц. Кинетический момент гироскопа при f = 800 Гц равен H = 700 г•см•с, крутизна датчика моментов составляет 37o/ч/мА, максимальный ток усилителя (ток насыщения) - 85 мА
При этом ωmax = 0,87o/с.
Следовательно, гироскоп может быть успешно использован в узком (точном) диапазоне измерений угловых скоростей подвижного объекта. Однако, для использования его в расширенном (грубом) диапазоне измерений необходимо уменьшить величину его кинетического момента с помощью дополнительного электронного блока формирования управляющего сигнала путем уменьшения частоты питания гиромотора.
Генератор опорной частоты, входящей в систему питания гиромотора, выдает частоту 4800 Гц. В штатном режиме этот сигнал без преобразования поступает в преобразователь трехфазного напряжения, который автоматически осуществляет деление указания частоты на 6, т.е. на обмотки гиромотора поступает частота 800 Гц.
В режиме демпфирования колебаний подвижного объекта на выходе делителей 22 и 23 формируется частота 1129,4 Гц, которая через схему сравнения поступает на преобразователь трехфазного напряжения и также автоматически делится в нем на 6, т.е. на обмотки гиромотора в этом случае поступает пониженная частота 188 Гц.
Крутизна датчиков момента по току становится равной
а диапазон измеряемых угловых скоростей увеличивается до
Следовательно, при пониженной частоте питания гиромотора гироскоп может быть использован в расширенном (грубом) диапазоне измерений. При этом из-за уменьшения величины кинетического момента ухудшаются точностные характеристики гироскопа, однако это ухудшение будет меньше допустимого (десятикратного) по условиям эксплуатации подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2007 |
|
RU2337314C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА И ИСТОЧНИК ПИТАНИЯ | 1997 |
|
RU2196302C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
Использование: в системах управления движением. Сущность изобретения: измеритель содержит гиромотор в кожухе, установленном в кардановом подвесе, датчики углов и моментов, усилители коррекции, преобразователь трехфазного напряжения, а также электронный болк формирования управляющего сигнала и ключ-реле. Кроме того, электронный блок выполнен в виде логического устройства с переменным коэфициентом деления и содержит делитель частоты, схему совпадения и инвертор. 1 з.п.ф-лы, 2 ил.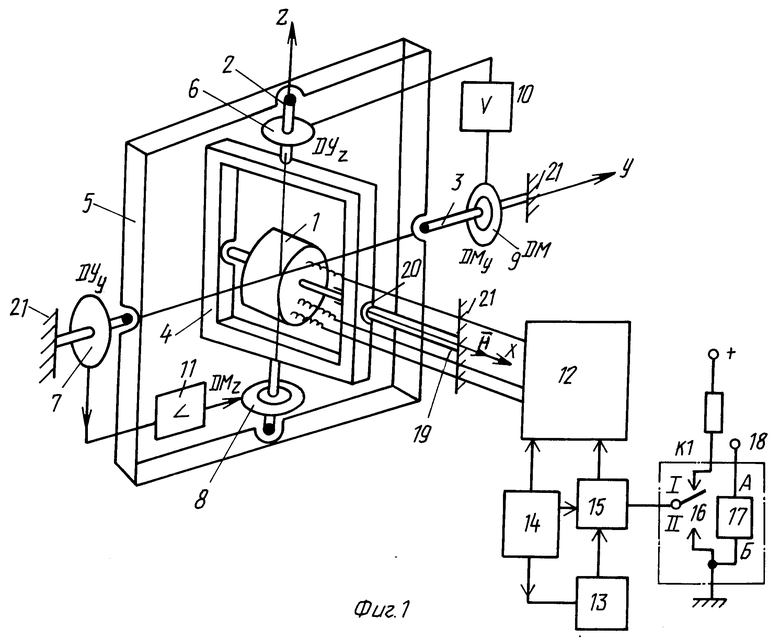
| Никитин Е.А | |||
| и др | |||
| Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Гироскопические системы под редакцией Пельпора Д.С | |||
| ч.II | |||
| - М.: Высшая школа, 1971, с | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
