Изобретение относится к гироскопической технике и может быть использовано в гироскопических приборах для стабилизации вертикального направления.
В литературе известны гироскопические приборы для измерения углов крена и тангажа, представляющие собой гироскопы с тремя степенями свободы. Известно также, что для правильного измерения углов крена и тангажа эти приборы снабжают системой горизонтальной коррекции. В качестве чувствительного элемента системы горизонтальной коррекции известно использование электролитического уровня (см., например, книгу Г.О.Фридлендера и М.С.Козлова «Авиационные гироскопические приборы», стр.39, 43-47).
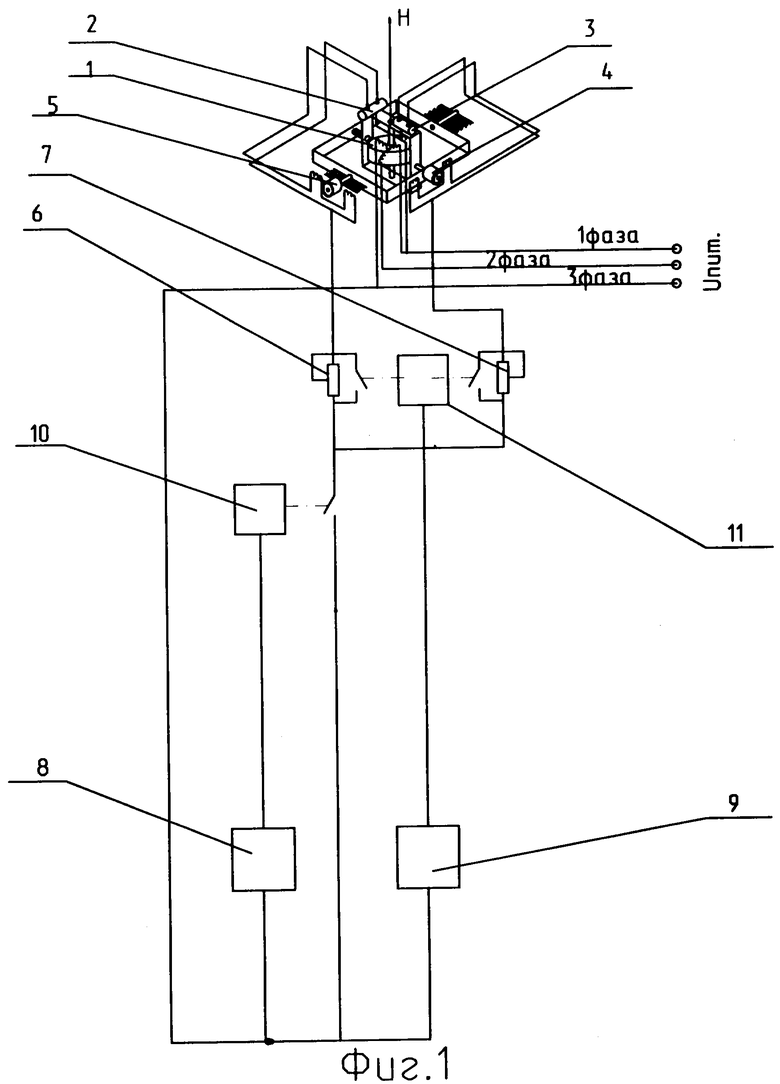
Наиболее близким по технической сущности к заявляемому устройству является гироскопический датчик крена (патент RU 2264597 С2, кл. G01С 19/44), являющийся прототипом предлагаемого изобретения, содержащий (см. Фиг.1) гиромотор 1 в кардановом подвесе, жидкостные маятниковые датчики типа ДЖМ-9Б 2, 3, коррекционные двигатели 4, 5, гасящие регулировочные резисторы 6, 7, программируемые таймеры 8, 9, исполнительные реле 10, 11. Система коррекции работает следующим образом. При включении питания начинает разгоняться гиромотор, одновременно таймеры 8 и 9 подключают управляющие обмотки реле 10 и 11, которые срабатывают и контактами реле 10 отключают цепь питания управляющих обмоток коррекционных двигателей, а контактами реле 11 шунтируют регулировочные резисторы в цепях управляющих обмоток коррекционных двигателей. Таким образом, в начальный момент подачи питающего напряжения гиромотор будет набирать обороты, а горизонтальная коррекция будет отключена. Коррекция включится таймером 8 и реле 10 через 5-10 с, за которые гиромотор набирает достаточное количество оборотов, при которых его стабилизирующий момент не вызывает автоколебаний гироузла под действием повышенных восстанавливающих моментов коррекционных двигателей. Время действия повышенного восстанавливающего момента определяется настройкой таймера 9 из расчета достаточности для обеспечения времени готовности прибора. В дальнейшем, если под влиянием каких-либо причин ось ротора гироскопа отклонится от вертикали по оси внутренней или наружной рамы, будет действовать восстанавливающий момент от соответствующего коррекционного двигателя, величина которого настроена регулировочным резистором (6 или 7), установленным в цепи управляющих обмоток данного коррекционного двигателя. Значение восстанавливающего момента коррекции для датчиков крена, используемых на подвижных наземных объектах, выбирается в зависимости от требуемого соотношения систематической и периодической составляющих погрешности датчика крена. Так, например, для систем стабилизации оптических линий визирования определяющей является периодическая составляющая (требуется регулировка на «слабую» коррекцию), а для ввода поправки на крен оси цапф в системах стабилизации танкового вооружения основную погрешность вносит систематическая составляющая (требуется регулировка на «сильную» коррекцию).
Достоинством известного датчика крена является возможность обеспечения малого времени готовности за счет отключения коррекции в начальный момент запуска, позволяющее исключить автоколебания гироузла, а также за счет действия в период запуска повышенного восстанавливающего момента. Недостатком известного датчика крена является ограниченный диапазон регулировки величины восстанавливающего момента коррекции по верхнему пределу, то есть невозможность снижения систематической составляющей погрешности. Причиной невозможности повышения момента коррекции является появление автоколебаний гироузла при установке жидкостных маятниковых датчиков (ДЖМ) с малой зоной пропорциональности, что приводит к неустойчивому положению пузырька воздуха в ДЖМ при токах через центральный контакт ДЖМ более 30 мА (определено экспериментально для жидкостного датчика типа ДЖМ-9Б). Поэтому для устранения автоколебаний при малой зоне пропорциональности ДЖМ приходится уменьшать корректирующий момент, что и приводит к снижению точности работы датчика крена. Известным способом исключения автоколебаний является подбор ДЖМ с пологой крутизной характеристики или разворот ДЖМ относительно выходной оси, что опять же уменьшает крутизну характеристики корректирующего момента и приводит к снижению точности датчика крена.
Задачей предлагаемого изобретения является повышение точности датчика крена за счет снижения систематической составляющей погрешности путем реализации двухрежимной работы системы горизонтальной коррекции по «положению ДЖМ». А именно режим «слабой» коррекции в горизонтальном положении ДЖМ или в зоне малых отклонений ДЖМ от плоскости горизонта, например в зоне пропорциональности характеристики ДЖМ, позволяет исключить автоколебания гироузла. А режим «сильной» коррекции при больших угловых отклонениях ДЖМ от плоскости горизонта позволяет максимально повысить момент коррекции и снизить систематическую составляющую погрешности датчика крена. Это достигается тем, что в датчике крена, содержащем гиромотор в кардановом подвесе и систему горизонтальной коррекции с коррекционными двигателями и жидкостными маятниковыми датчиками, центральные контакты которых подключены к одной из фаз питающего напряжения, а выходные - ко входам соответствующих обмоток управления коррекционных двигателей, средние точки обмоток управления соединены через регулировочные резисторы с другой соответствующей фазой питающего напряжения, исполнительное реле, подключенное к таймеру, контакты которого подключены последовательно к регулировочным резисторам, дополнительно введены два датчика тока, каждый из которых подключен параллельно соответствующему регулировочному резистору, два блока обработки сигналов, входы которых подключены к выходу соответствующего датчика тока, два суммирующих устройства, два компаратора, каждый из которых охвачен положительной обратной связью, состоящей из интегратора и выпрямителя, выходы блоков обработки сигналов, выходы выпрямителей и входы компараторов подключены к соответствующим суммирующим устройствам, на входы которых дополнительно подается опорное напряжение, к выходу каждого компаратора подключены дополнительные вторые исполнительные реле, контакты которых подключены последовательно к соответствующим датчикам тока.
Существенными отличительными признаками являются:
- Введение датчиков тока, включенных параллельно регулировочным резисторам в цепях управляющих обмоток коррекционных двигателей и позволяющих по изменению величины тока косвенно определить положение ДЖМ относительно плоскости горизонта.
- Введение компараторов с настройкой переключения их состояния по сигналам с датчиков тока, соответствующих двум положениям ДЖМ:
а) горизонтальному и б) отклоненному на угол, превышающий зону пропорциональности его характеристики (в зоне насыщения). Настройка момента переключения компараторов производится выставкой соответствующей величины опорного напряжения, подаваемого на суммирующее устройство.
- Введение исполнительных реле, которые своими контактами в цепях датчиков тока по соответствующему состоянию компараторов реализуют двухрежимную работу системы коррекции, то есть в замкнутом состоянии контакты шунтируют регулировочные резисторы и обеспечивают «сильную» коррекцию, в разомкнутом обеспечивают «слабую» коррекцию.
- Введение для компараторов положительной обратной связи, которая в режиме «слабой» коррекции обеспечивает режим «опроса» о положении ДЖМ. Так как в режиме «слабой» коррекции контакты исполнительного реле разрывают (отключают) цепь датчика тока, при этом теряется информация о токе через него, следовательно, и о положении ДЖМ, то положительная обратная связь обеспечивает периодическое и кратковременное переключение состояния компаратора в режим «сильной» коррекции, в котором будет подключен датчик тока, позволяющий определить положение ДЖМ. При этом, если ДЖМ находится в положении горизонта или с определенной точностью близко к нему, то компаратор вновь переходит в состояние, обеспечивающее режим «слабой» коррекции, если ДЖМ отклонен от горизонтального положения, то компаратор остается в состоянии, обеспечивающем режим «сильной» коррекции. Периодичность включения режима «опроса» определяется параметрами интегратора и выбирается экспериментально или из расчета, чтобы за время отсутствия информации о положении ДЖМ отклонение гироскопа по какой-либо оси не превысило допустимую погрешность датчика крена, например от 3 с до 5 с. Длительность включения режима «опроса» определяется быстродействием электроники, как правило, не превышает 0,01 с, что, естественно, не успевает вызвать автоколебаний гироузла.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения. Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна».
Сравнение заявляемого гироскопического датчика крена с другими техническими решениями показывает, что отдельные режимы работы, обеспечиваемые отличительными признаками, в технике широко известны. Так, известно применение датчика тока для оценки режима работы устройства, известно применение компаратора для переключения цепей, известно применение положительной обратной связи для периодического изменения состояния устройства (см. кн. «Искусство схемотехники». П.Хоровиц, У. Хилл, том 1. М.: «Мир», 1986, п.3.30, стр.229-230, п.3.22, стр.213-214, п.3.23, стр.215-216). Известна двухрежимная система межрамочной коррекции (см. а.с. СССР №48833, кл. С01С, 19/54). Однако не обнаружено применения указанных признаков в заявляемой совокупности с другими признаками для достижения указанного технического результата, следовательно, заявляемое устройство соответствует критерию изобретения «изобретательский уровень».
На Фиг.2 представлена электрокинематическая схема заявляемого гироскопического датчика крена.
Гироскопический датчик крена содержит гиромотор 1 в кардановом подвесе, жидкостные маятниковые датчики 2, 3, коррекционные двигатели 4, 5, гасящие регулировочные резисторы 6, 7, программируемый таймер 8, исполнительное реле 9 и его контакты 10, датчики тока 11 и 11а, схемы обработки сигналов 12 и 12а (в данной реализации состоящие из дифференциального усилителя, усилителя и выпрямителя), суммирующие устройства 13 и 13а, компараторы 14 и 14а, положительные обратные связи компараторов 15 и 15а, состоящие каждый из интегратора 15' и 15'а и выпрямителя 15" и 15"а, исполнительных реле 16 и 16а со своими контактами 17 и 17а, включенных в соответствующие цепи датчиков тока.
Гироскопический датчик крена работает следующим образом.
При включении питания одновременно подключаются обмотки гиромотора 1, обмотки возбуждения коррекционных двигателей 4, 5, таймер 8, центральные контакты ДЖМ 2, 3. При этом таймер 8 подключает реле 9, которое своим контактом 10 отключает цепь питания управляющих обмоток коррекционных двигателей 4, 5, таким образом, гиромотор начинает разгоняться, а коррекция в это время отключена. Через 5-10 с таймер 8 отключит реле 9, которое своим контактом 10 подключит управляющие обмотки коррекционных двигателей 4, 5, и начнется процесс восстановления гироскопа к вертикали места. Время настройки таймера 8 выбрано из расчета достаточности для набора гиромотором оборотов, при которых его стабилизирующий момент не будет вызывать автоколебаний гироузла при действии восстанавливающих моментов в начальный период запуска.
Далее рассмотрим работу системы горизонтальной коррекции после завершения периода запуска и, если по каким-либо причинам ось гиромотора будет отклонена от вертикального положения, на примере отклонения относительно оси внутренней рамы. В этом случае ДЖМ 2 будет отклонен от плоскости горизонта, через соответствующую управляющую обмотку коррекционного двигателя 5 будет протекать ток, соответствующий величине отклонения ДЖМ. Этот же ток будет протекать в регулировочном резисторе 6, а если замкнут контакт 17, то практически и в датчике тока 11, так как его сопротивление на порядок меньше сопротивления резистора 6, который в данном случае будет зашунтирован. Если контакт 17 разомкнут, то через 3-5 с (время, определяемое параметрами интегратора 15' в положительной обратной связи 15 компаратора 14) компаратор 14 переключится и подключит реле 16, которое сработает и замкнет контакт 17. Сигнал с датчика тока 11, соответствующий по величине отклоненному от горизонта положению ДЖМ на угол, либо превышающий зону пропорциональности характеристики ДЖМ, либо в зоне пропорциональности (в зависимости о требуемой точности датчика крена), и преобразованный схемой обработки 12, поступит на суммирующее устройство 13. На входе суммирующего устройства 13 имеется также опорное напряжение Uопорное, выбранное таким образом, чтобы при наличии сигнала с датчика тока соответствующего отклоненному положению ДЖМ обеспечилось переключение компаратора 14 в состояние, при котором будет подключено исполнительное реле 16 и контакт 17 будет замкнутым. Под действием повышенного восстанавливающего момента, так как гасящий резистор 6 в цепи коррекционного мотора 5 зашунтирован параллельной цепью датчика тока с меньшим омическим сопротивлением, ось гиромотора будет ускоренно возвращаться в вертикальное положение, а ДЖМ - в положение плоскости горизонта. Как только сигнал с датчика тока 11 будет равен величине, соответствующей горизонтальному положению ДЖМ (с выбранной точностью), компаратор 14 переключится в другое состояние, при котором реле 16 будет отключено и контакт 17 разомкнет цепь датчика тока 11. При этом разрывается шунтирующая цепь регулировочного резистора 6, который обеспечивает функционирование режима «слабой» коррекции. Под действием малого восстанавливающего момента, ограниченного регулировочным гасящим резистором 6, при котором автоколебания гироузла отсутствуют, будет поддерживаться вертикальное положение оси гиромотора. При этом через каждые 3-5 с обеспечивается переключение состояния компаратора в положение, при котором подключается исполнительное реле 16, замыкаются контакты 17 и подключается датчик тока 11, сигнал с которого подается на суммирующее устройство, где имеется опорное напряжение Uопорное, величина которого выбрана из условия, что если сигнал с датчика тока соответствует отклоненному положению ДЖМ, то компаратор останется в положении, обеспечивающем подключение реле 16, и будет действовать повышенный восстанавливающий момент коррекции, обеспечивающий повышение точности датчика крена. Если же сигнал с датчика тока соответствует горизонтальному положению ДЖМ, опорное напряжение должно обеспечить состояние компаратора, при котором реле 16 будет отключено, и будет действовать пониженный восстанавливающий коррекционный момент, обеспечивающий отсутствие автоколебаний гироузла датчика крена. Таким образом, обеспечивается режим «опроса» положения ДЖМ с периодичностью 3-5 с, что определяется параметрами интегратора 15' в цепи положительной обратной связи 15 компаратора 14, и длится этот режим 0,01 с, что определяется быстродействием электроники. В результате работы предлагаемой «двухрежимной» горизонтальной коррекции в режиме «слабой» коррекции, при положении ДЖМ близко к горизонтальному, обеспечивается отсутствие автоколебаний. А для случая больших возмущающих воздействий, вызывающих большие отклонения ДЖМ от горизонта, работает «сильная» коррекция, обеспечивающая повышение точности датчика крена.
Выбор величины опорного напряжения, подаваемого на соответствующее суммирующее устройство, производится в зависимости от точности датчика крена, которую необходимо обеспечить, или по каналу измерения крена или тангажа (по осям внутренней или наружной рам карданова подвеса). Например, датчик жидкостной маятниковый типа ДЖМ-9Б имеет смешанную характеристику с пропорциональным участком от ±30 угл. мин до ±40 угл. мин. Если требуется обеспечить точность αmax по каждой из осей карданова подвеса не более ±30 угл. мин, то опорное напряжение должно соответствовать значению, при котором обеспечивается переключение компаратора при отклонении ДЖМ от плоскости горизонта на угол не менее ±30 угл. мин, что будет соответствовать отклонению ДЖМ до зоны насыщения для ДЖМ, имеющих пропорциональный участок характеристики до ±30 угл. мин, и в зоне пропорциональности характеристики для ДЖМ, имеющих пропорциональный участок более ±30 угл. мин. При этом по каждой оси карданова подвеса можно обеспечить свою регулировку.
По предложенному техническому решению были изготовлены опытные образцы датчиков крена. Результаты испытаний образцов показали наибольшую эффективность решений в условиях внешних климатических и механических воздействий, так как в этих условиях максимально возрастают внешние возмущающие моменты по осям карданова подвеса, определяющие точность измерений. В процессе испытаний в условиях внешних климатических и механических, воздействий погрешность измерений датчиков не превышала значений, имевших место в нормально климатических условиях и на неподвижном основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
Изобретение относится к гироскопической технике и может быть использовано в гироскопических приборах для стабилизации вертикального направления. Датчик содержит гиромотор в кардановом подвесе и систему горизонтальной коррекции с коррекционными двигателями и жидкостными маятниковыми датчиками (ДЖМ), центральные контакты которых подключены к одной из фаз питающего напряжения, а выходные - ко входам соответствующих обмоток управления коррекционных двигателей, таймер и исполнительное реле, контакты которого включены последовательно с регулировочными резисторами. Средние точки обмоток управления соединены через регулировочные резисторы с другой соответствующей фазой питающего напряжения. Датчик содержит также два датчика тока, включенные параллельно регулировочным резисторам, два блока обработки сигналов, входы которых подключены к выходам датчиков тока, два суммирующих устройства и два компаратора, каждый из которых охвачен положительной обратной связью. Техническим результатом является повышение точности за счет снижения систематической составляющей погрешности путем реализации двухрежимной работы системы горизонтальной коррекции по «положению ДЖМ». 1 з.п. ф-лы, 2 ил.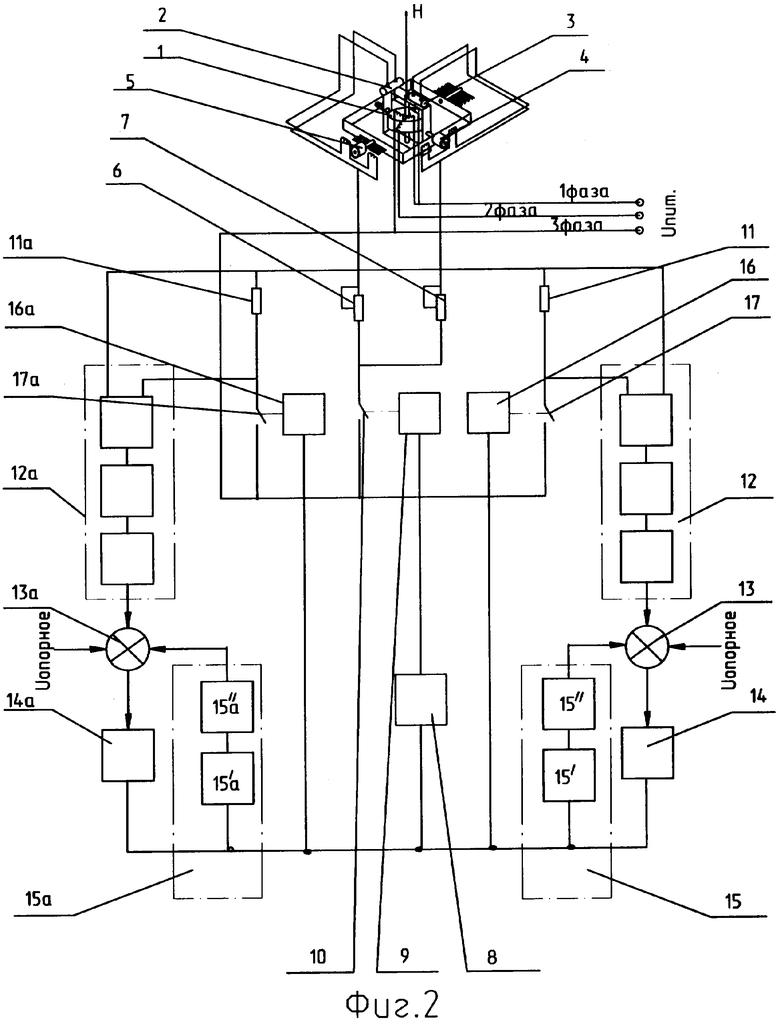
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| SU 1773157 А1, 20.09.1999 | |||
| GB 2066474 А, 08.07.1981 | |||
| US 3204894 А, 07.09.1965. | |||

