Изобретение относится к силоизмерительной технике и может быть использовано для измерения крутящего момента, передаваемого вращающимися валами различных объектов.
Известен широкий спектр методов измерения крутящего момента, основанного на индуктивном, тензометрическом, магнитоупругом, фазометрическом, фотометрическом и ином комбинированном преобразовании крутящего момента в электрический сигнал (см., например, обзор Парфенова М.М. и Пчелинцевой В.Н. Современное состояние и перспективы развития преобразователей крутящего момента. М., ЦНИИТЭИ приборостроения, 1980).
Общим недостатком указанных способов измерения крутящего момента является их низкая универсальность, обусловленная разнообразием конструкций и режимов работы объектов техники.
Известен, в частности, фазометрический метод измерения крутящего момента, заключающийся в фотоэлектрическом формировании двух сигналов, сдвинутых по фазе на величину угла закручивания, и определении крутящего момента по величине разности фаз напряжений двух фототранзисторов, получающих световые импульсы от светодиодов через прорези растровых дисков (см. авт. св. СССР 1509640, G 01 L 3/04, 3/12, 1989).
В дополнение к общему недостатку приведенных в качестве аналогов методов измерения крутящего момента: низкой универсальности, данный метод обладает зауженным диапазоном измерения крутящего момента (большой величиной малых крутящих моментов).
Наиболее близким по технической сущности к заявляемому способу является способ определения крутящего момента путем регистрации с помощью разнесенных датчиков двух периодических параметров, связанных с силовым режимом вращения вала и представляющих собой один из параметров рабочего цикла двигателя, например давление топлива у форсунки какого-либо цилиндра, и вибрацию на опоре вала двигателя, формирования на их основе сигналов, имеющих друг относительно друга фазовый сдвиг, в частности двух импульсных сигналов, и после их измерительной обработки, а именно получения с помощью измерителя временных интервалов величины фазового сдвига, вычисления величины крутящего момента (см. а.с. СССР 1583765, G 01 L 3/10, 1990).
Недостатками этого способа являются сниженные надежность и точность измерения, связанные с ухудшением помехоустойчивости.
Технический результат заявляемого способа - расширение области применения за счет повышения универсальности метода измерения и упрощения его эксплуатационных свойств, а также повышение надежности и точности измерения.
Указанный технический результат достигается тем, что в способе определения крутящего момента путем регистрации с помощью разнесенных датчиков двух периодических параметров, связанных с силовым режимом вращения вала, формирования на их основе сигналов, имеющих друг относительно друга фазовый сдвиг, и после их измерительной обработки вычисления величины крутящего момента, в качестве обоих периодических параметров используют частоту вращения вала, которую синхронно регистрируют с разнесением датчиков частоты на длину измерительного участка вала и преобразуют в два частотно-модулированных сигнала до выделения их разностной частоты биений, а крутящий момент определяют по формуле:
Mкр = KΔϕ•Kв•Fб,
где Fб - частота биений, Гц;
KΔϕ - частотный коэффициент закручивания вала,
где Fд - девиация частоты, Гц,
Кв - опорный коэффициент данного типа вала,
где G - модуль сдвига материала вала, н/м2,
Jp - полярный момент инерции сечения вала, м4,
L - длина измерительного участка вала, м.
Предлагаемый способ основан на вытекающем из возможностей частотно-модуляционного метода измерения выведении пропорциональности между угловыми характеристиками деформации кручения и разностной частотой биений
где Δϕ - угол закручивания вала,
ϕ = 2π - полный угол поворота вала.
Указанная зависимость получена в результате введения дискретизации по координате и времени для прямых упругих стержней и валов при рассмотрении их продольных и крутильных колебаний (см. книгу Маквецкого Е.Н. и Тарковского А. М. Механические воздействия и защита радиоэлектронной аппаратуры. М., "Радио и связь", 1993, с.64; 72-74, выражения 4.25-4.28; с.78-80) и последующей, применительно к условиям деформации кручения (сдвига), ее адаптации и ее взаимосвязи через временную составляющую с известным в радиолокации в частотном методе измерения дальности соотношением между частотой биений и временем задержки:
Fб=2Fд•Fм•tз,
где Fм - частота модуляции, равная частоте вращения вала,
tз - время задержки, временной сдвиг двух периодических параметров друг относительно друга,
(см. книгу Финкельштейна М.И. Основы радиолокации, М., "Радио и связь", 1983, с.113, формула 2.8.2).
Из этого соотношения вытекает зависимость между угловыми характеристиками деформации кручения и разностной частотой биений.
Действительно, при разностной частоте биений
Fб=2Fд•Fм•tз,
имеет место равенство:
которое после перемножения и деления правой его части на 2π приходит к искомой зависимости:
где  - относительный угол закручивания вала, 2πFмtз = Δϕ - угол закручивания вала, который составляет указанное выражение в соответствии с известной методикой определения разности фаз между двумя колебаниями одинаковой частоты (см. книгу Кушнир Ф.В. и Савенко В.Г. Электрорадиоизмерения. Л., "Энергия", 1975, с.307).
- относительный угол закручивания вала, 2πFмtз = Δϕ - угол закручивания вала, который составляет указанное выражение в соответствии с известной методикой определения разности фаз между двумя колебаниями одинаковой частоты (см. книгу Кушнир Ф.В. и Савенко В.Г. Электрорадиоизмерения. Л., "Энергия", 1975, с.307).
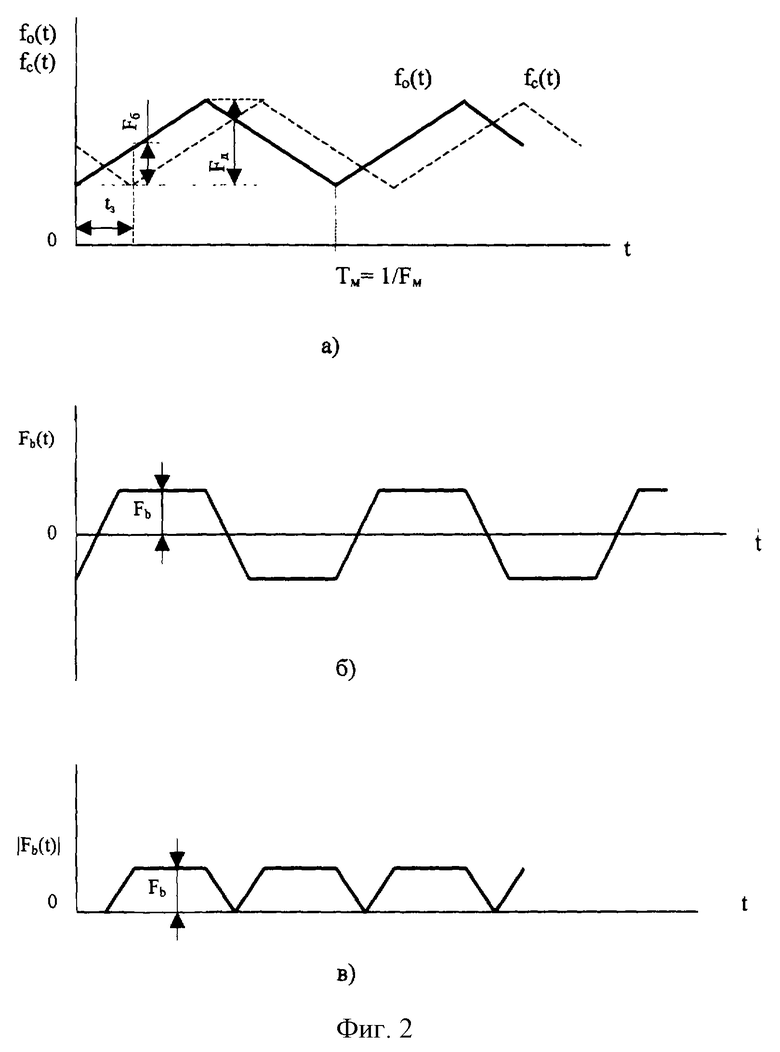
На фиг. 1 изображена структурная схема устройства для реализации предлагаемого способа; на фиг.2 - временные диаграммы электрических сигналов.
Устройство для реализации предлагаемого способа содержит датчики 1 и 2 частоты вращения вала, установленные на границах измерительного участка вала и выходами соединенные через триггеры Шмитта 3 и 4 и делители частоты 5 и 6 с входами интеграторов 7 и 8, снабженных, в свою очередь, на выходе усилителями напряжения 9 и 10, соединенными с модуляционными входами генераторов качающейся частоты 11 и 12. Последние своими выходами соединены с входами смесителя 13, на выходе снабженного фильтром низкой частоты 14, соединенного, в свою очередь, с входом вычислителя 15, снабженного на выходе цифровым индикатором 16.
Предлагаемый способ реализуют следующим образом.
С помощью разнесенных вдоль вала фотоэлектрических (или индуктивных) датчиков 1 и 2 частоты вращения вала (см. фиг.1) синхронно снимают с вращающегося вала два сдвинутых по фазе друг относительно друга сигнала с частотой, пропорциональной частоте вращения вала.
Прошедшие через триггеры Шмитта 3 и 4 и делители частоты 5 и 6 подготовленные сигналы подают на интеграторы 7 и 8, с которых снимают сигналы в пилообразном виде, с треугольной формой, и пропускают их через усилители напряжения 9 и 10 на генераторы качающейся частоты 11 и 12 для обеспечения периодической частотной модуляции и сохранившие фазовый сдвиг, сформированные частотно-модулированные сигналы, а именно, опорный сигнал (с датчика 1) с частотой f0(t) и сдвинутый сигнал (с датчика 2) с частотой fс(t) (см. фиг. 2а), подают на смеситель 13.
В результате смешения (сложения) двух частотно-модулированных сигналов на входе смесителя образуются биения. Мгновенная частота биений равна абсолютному значению разности мгновенных значений частот сдвинутых друг относительно друга частотно-модулированных сигналов |Fб(t)| = |f0(t)-fc(t)|, где f0(t) - мгновенное значение частоты опорного сигнала; fc(t) - мгновенное значение частоты сдвинутого сигнала (см. фиг.2,б,в). После детектирования в смесителе фильтром низкой частоты 14 выделяют преобразованный сигнал, имеющий частоту биений Fб.
С помощью вычислителя 15 по указанной в настоящем описании формуле вычисляют величину крутящего момента, передаваемого вращающимся валом, Мкр, которую регистрируют с помощью цифрового индикатора 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения усилия кривошипного горячештамповочного пресса по крутящему моменту приемного вала | 2024 |
|
RU2837056C1 |
| Способ и устройство измерения крутящего момента приёмного вала горячештамповочного пресса для измерения его усилия | 2023 |
|
RU2820805C1 |
| СПОСОБ ФОРМИРОВАНИЯ МОДУЛИРОВАННОЙ ПОМЕХИ | 2000 |
|
RU2174237C1 |
| СИНТЕЗАТОР ЧАСТОТ | 2009 |
|
RU2423784C2 |
| БЛОК РУЧНОГО РЕЗЕРВИРОВАНИЯ | 2004 |
|
RU2282882C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ПОЖАРНОЙ ТРЕВОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2207630C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ | 2010 |
|
RU2426662C1 |
| ДАТЧИК ОБОРОТОВ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2263780C2 |
| СПОСОБ ЭЛЕКТРОСТАТИЧЕСКОГО НАПЫЛЕНИЯ ПОРОШКОВЫХ ПОКРЫТИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2086312C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА СКВАЖИН В ПРОЦЕССЕ БУРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2193655C2 |
Изобретение относится к силоизмерительной технике и может быть использовано для измерения крутящего момента, передаваемого вращающимися валами различных объектов. С помощью разнесенных на длину измерительного участка вала датчиков частоты его вращения синхронно снимают два имеющих друг относительно друга фазовый сдвиг сигнала, которые преобразуют в два частотно-модулированных сигнала до выделения их разностной частоты биений и определяют крутящий момент по формуле: Mкр = KΔϕ•Kв•Fб, где Fб - частота биений, Гц; KΔϕ - частотный коэффициент закручивания вала,  где Fд - девиация частоты, Гц; Кв - опорный коэффициент данного типа вала,
где Fд - девиация частоты, Гц; Кв - опорный коэффициент данного типа вала,  где G - модуль сдвига материала вала, н/м2, Jр - полярный момент инерции сечения вала, м4, L - длина измерительного участка вала, м. Технический результат: расширение технологических возможностей, повышение точности. 2 ил.
где G - модуль сдвига материала вала, н/м2, Jр - полярный момент инерции сечения вала, м4, L - длина измерительного участка вала, м. Технический результат: расширение технологических возможностей, повышение точности. 2 ил.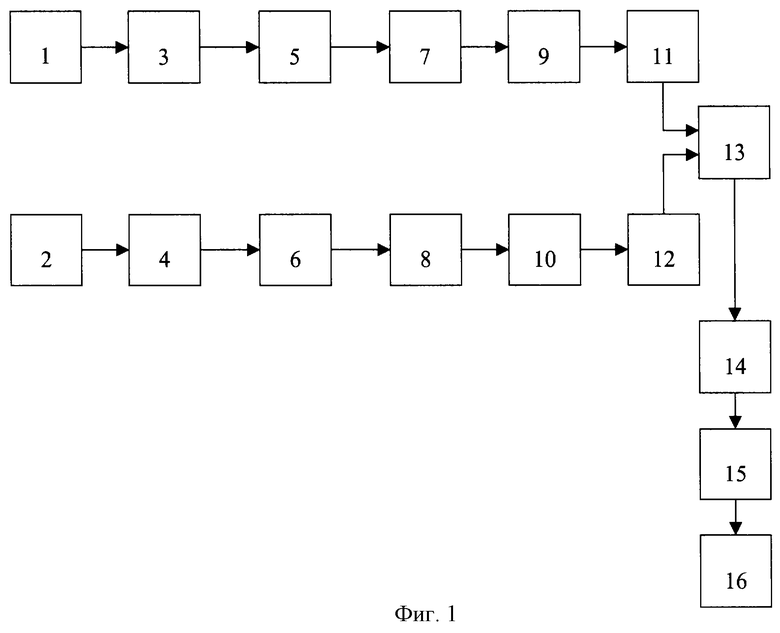
Способ определения крутящего момента путем регистрации с помощью разнесенных на длину измерительного участка вала датчиков двух периодических параметров, связанных с силовым режимом вращения вала, формирования на их основе сигналов, несущих информацию о закручивании вала, и оценки величины крутящего момента в результате вычислительной обработки последних, отличающийся тем, что в качестве обоих периодических параметров используют частоту вращения вала, на основе которой формируют два частотно-модулированных сигнала, полученных подачей сигналов датчиков, предварительно преобразованных в два модулирующих сигнала пилообразного вида, например, треугольной формы, на входы двух генераторов качающейся частоты, смешивают сформированные частотно-модулированные сигналы до выделения их разностной частоты биений, по которой судят о величине крутящего момента, определяемой по формуле
Mкр = KΔϕ•Kв•Fб,
где Fб - частота биений, Гц;
KΔϕ - частотный коэффициент закручивания вала,
где Fд - девиация частоты, Гц;
Кв - опорный коэффициент данного типа вала,
где G - модуль сдвига материала вала, н/м2;
Jр - полярный момент инерции сечения вала, м4;
L - длина измерительного участка вала, м.
| ОДИНЕЦ С.С., ТОПИЛИН Г.Е | |||
| Средства измерения крутящего момента | |||
| - М.: Машиностроение, 1977, с.48-59 | |||
| Способ определения крутящего момента на валу двигателя внутреннего сгорания | 1988 |
|
SU1583765A1 |
| Устройство для измерения крутящего момента | 1987 |
|
SU1509640A1 |

