Предлагаемое изобретение относится к устройствам управления, в которых обеспечивается плавное переключение с автоматического слежения за регулируемым процессом на ручное и обратно (с ручного на автоматическое) за счет формирования сигнала управления путем сравнения выходного сигнала регулятора с задаваемым сигналом ручного управления, и может быть использовано для управления объектами различного назначения.
Известны устройства управления, содержащие основной контур управления, состоящий из задатчика, сумматора, переключателя, регулятора и исполнительного механизма, и контур ручного управления, содержащий пульт управления оператора, переключатель и усилитель-интегратор, в основе которых лежит принцип фиксации величины сигнала управления в момент переключения и добавления к нему сигнала, соответствующего разности между зафиксированным сигналом и необходимым выходным [1-5].
Однако в ряде практических случаев, при управлении технологическими процессами, появляется необходимость перехода как с ручного на автоматическое управление, так и обратно, например, когда автоматическому управлению угрожает возможность срыва, а оператор, обладая свойством селективности, может парировать возникающие отклонения.
В этом случае эти устройства обладают низкой надежностью и точностью, так как к моменту переключения команда ручного управления не подготовлена и безударный переход с автоматического на ручное управление, в основном, зависит от квалификации оператора, а при регулировании некоторых технологических процессов недопустим срыв управления ни при переходе с ручного на автоматическое управление, ни обратно.
Наиболее близкой по технической сущности к предлагаемому устройству является система управления, содержащая последовательно соединенные задатчик, первый сумматор, первый переключатель, регулятор и исполнительный механизм, выход которого соединен со вторым входом первого сумматора, и пульт управления оператора, первый выход которого соединен с первым входом второго сумматора, второй вход которого соединен с выходом регулятора, а выход второго сумматора через второй переключатель соединен со входом интегрирующего усилителя, выход которого соединен со входом масштабирующего усилителя и с третьим входом второго сумматора, а выход масштабирующего усилителя соединен с третьим входом второго переключателя, первый вход которого соединен с третьим входом первого переключателя, управляющие входы переключателей соединены со вторым выходом пульта управления оператора [6].
Недостатком такой системы является низкая надежность управления, так как при отказе регулятора ручной режим управления исполнительным механизмом также становится невозможным, а это означает полную потерю управления объектом.
Цель изобретения - повышение надежности управления. Поставленная цель достигается тем, что в систему введены третий и четвертый переключатели, третий и четвертый сумматоры и второй интегрирующий усилитель, вход которого соединен с выходом четвертого переключателя, а выход соединен с третьим входом третьего переключателя, вторым входом второго сумматора, вторым входом третьего сумматора и вторым входом четвертого сумматора, первый вход третьего переключателя соединен с выходом регулятора, первым входом третьего сумматора и первым входом четвертого сумматора, а выход третьего переключателя соединен со входом исполнительного механизма, выход третьего сумматора соединен с третьим входом первого переключателя, выход четвертого сумматора соединен с первым входом четвертого переключателя, а третий вход четвертого переключателя соединен с выходом второго сумматора, вторые входы (управляющие) третьего и четвертого переключателей соединены со вторым выходом пульта 10 управления оператора.
В процессе проведенного поиска по источникам научно-технической и патентной информации не было обнаружено устройства, обладающего такой же совокупностью существенных признаков и обеспечивающего заявленный выше технический результат. Указанное обстоятельство позволяет сделать вывод, что предлагаемое изобретение представляет собой техническое решение задачи, является новым, обладает изобретательским уровнем и промышленно применимо.
На чертеже представлена функциональная схема блока ручного резервирования.
Блок содержит первый сумматор 1, первый переключатель 2, регулятор 3, исполнительный механизм 4, второй сумматор 5, второй переключатель 6, первый интегрирующий усилитель 7, масштабирующий усилитель 8, задатчик 9, пульт 10 управления оператора, третий сумматор 11, четвертый сумматор 12, третий переключатель 13, четвертый переключатель 14 и второй интегрирующий усилитель 15.
В режиме ручного управления управляющие входы первого 2, второго 6, третьего 13 и четвертого 14 переключателей обесточены, в результате чего их подвижные контакты соединены со своими третьими входами. Выход регулятора 3 (первого интегратора) отключен третьим переключателем 13 от исполнительного механизма 4 и через третий сумматор 11 и первый переключатель 2 соединен со своим входом.
Блок ручного резервирования работает следующим образом.
При подаче аналогового сигнала ручного управления с пульта 10 через второй сумматор 5, четвертый переключатель 14 на вход второго интегрирующего усилителя 15 (второй интегратор) на его выходе появляется сигнал управления, который пропорционален интегралу от входного сигнала воздействия. Этот сигнал через третий переключатель 13 подается на вход исполнительного механизма 4 (третьего интегратора), который и воздействует на регулируемый объект. Выходной сигнал интегрирующего усилителя 15 подключен ко второму входу второго сумматора 5 в качестве сигнала отрицательной обратной связи. В результате такого соединения блоков на входе исполнительного механизма 4 устанавливается сигнал, равный по величине сигналу с пульта 10 управления оператора. Выходной сигнал с интегрирующего усилителя 15 сравнивается на третьем сумматоре 11 с выходным сигналом регулятора 3 и разностный сигнал через первый переключатель 2 поступает на вход регулятора 3, следовательно, на выходе регулятора 3 установится выходной сигнал, равный выходному сигналу интегрирующего усилителя 15, т.е. выход регулятора 3 будет отслеживать выходной сигнал интегрирующего усилителя 15. При изменении сигнала с пульта 10 управления оператора выходной сигнал на выходе интегрирующего усилителя 15 также будет изменяться, так как сигнал с его выхода сравнивается на втором сумматоре 5 с сигналом управления с пульта 10 и разностный сигнал поступает через переключатель 14 на вход интегрирующего усилителя 15, причем величина этого разностного сигнала зависит от коэффициента усиления в этом контуре. Выходной сигнал с интегрирующего усилителя 15 через исполнительный механизм 4 воздействует на регулируемый объект. При этом выходной сигнал регулятора 3 будет синхронно отслеживать на своем выходе величину выходного сигнала интегрирующего усилителя 15 путем сравнения на третьем сумматоре 11 выхода регулятора 3 и выхода интегрирующего усилителя 15 и подачи разностного сигнала на вход регулятора 3 через первый переключатель 2.
Для перевода блока ручного резервирования в режим автоматического управления с пульта 10 управления оператора подается команда на управляющие входы первого переключателя 2, второго переключателя 6, третьего переключателя 13 и четвертого переключателя 14, в результате чего их подвижные контакты замыкаются со своими первыми входами. На вход регулятора 3, на выходе которого остался сигнал, соответствующий сигналу ручного управления, подается сигнал с выхода сумматора 1, равный разности сигналов с задатчика 9 и исполнительного механизма 4. Под действием этого сигнала выходной сигнал регулятора 3 увеличивается (уменьшается) и исполнительный механизм 4, отрабатывая выходной сигнал регулятора 3, стремится свести величину сигнала рассогласования с выхода первого сумматора 1 к нулю, обеспечивая равенство сигналов задания и регулируемой координаты. Выходной сигнал регулятора 3 подается также на вход четвертого сумматора 12, на котором сравнивается с выходным сигналом второго интегрирующего усилителя 15. Выходной разностный сигнал с четвертого сумматора 12 подается через первый вход четвертого переключателя 14 на вход второго интегрирующего усилителя 15, следовательно, на выходе интегрирующего усилителя 15 установится выходной сигнал, равный выходному сигналу регулятора 3, т.е. выход интегрирующего усилителя 15 будет отслеживать выходной сигнал регулятора 3. Выходной сигнал второго интегрирующего усилителя 15 подается и на второй вход второго сумматора 5, с выхода которого через второй переключатель 6 - на вход первого интегрирующего усилителя 7. Выходной сигнал интегрирующего усилителя 7 подается на третий вход второго сумматора 5, на котором происходит сравнение выходных сигналов интегрирующего усилителя 15 и интегрирующего усилителя 7, причем разностный сигнал рассогласования на выходе второго сумматора 5 зависит от коэффициентов усиления блоков 5-7 и будет тем меньше, чем больше коэффициент усиления указанного контура. Таким образом, на выходе интегрирующего усилителя 7 устанавливается сигнал, величина которого соответствует выходному сигналу с выхода интегрирующего усилителя 15 и выходному сигналу регулятора 3, так как они равны друг другу.
По каким-либо причинам оператор может в любой момент переключить блок ручного резервирования с автоматического на ручной режим управления, для чего управляющие входы первого переключателя 2, второго переключателя 6, третьего переключателя 13 и четвертого переключателя 14 обесточиваются командой с пульта 10 управления оператора, в результате чего их подвижные контакты устанавливаются в исходное положение, т.е. замыкаются со своими третьими входами. При этом вход регулятора 3 отключается от выхода первого сумматора 1 и подключается к выходу третьего сумматора 11. Вход исполнительного механизма 4 отключается переключателем 13 от выхода регулятора 3 и подключается к выходу интегрирующего усилителя 15, а вход интегрирующего усилителя 15 подключается переключателем 14 к выходу сумматора 5. Вход интегрирующего усилителя 7 отключается переключателем 6 от выхода сумматора 5 и подключается к выходу масштабирующего усилителя 8. В результате этого переключения с выхода сумматора 5 на вход интегрирующего усилителя 15 в первый момент подастся сигнал, равный разности между выходными сигналами интегрирующего усилителя 15 и интегрирующего усилителя 7, который будет близок к нулю, т.е. величина сигнала на выходе интегрирующего усилителя 15 останется такой же, какой она была в момент переключения, а исполнительный механизм 4 останется в прежнем положении, отрабатывая заданную величину. Одновременно с этим выход интегрирующего усилителя 7 через масштабирующий усилитель 8 и второй переключатель 6 замыкается со своим входом, в результате чего сигнал на выходе интегрирующего усилителя 7 будет плавно уменьшаться со скоростью, определяемой параметрами масштабирующего усилителя 8 и интегрирующего усилителя 7, и, через второй сумматор 5, оказывать свое влияние на работу исполнительного механизма 4, что не должно остаться незамеченным оператором. Оператор, воздействуя на соответствующие органы пульта 10 управления оператора, парирует падение сигнала на выходе интегрирующего усилителя 7. Через определенное, удобное для оператора время сигнал на выходе интегрирующего усилителя 7 становится равным нулю, а на выходе пульта 10 управления оператора - равным выходному сигналу интегрирующего усилителя 15, т.е. необходимому для работы исполнительного механизма 4.
Из приведенной функциональной схемы видно, что предлагаемый блок ручного резервирования состоит из двух слабо связанных между собой контуров управления - контура автоматического управления и контура ручного управления, причем первый активен в автоматическом режиме управления, а второй активен в ручном режиме управления. Вход исполнительного механизма 4 с помощью третьего переключателя 13 всегда подключен к активному в данном режиме контуру блока, а именно: в автоматическом режиме управления активный контур будет включать в себя последовательно соединенные задатчик 9, первый сумматор 1, первый переключатель 2 и регулятор 3, а в режиме ручного управления - последовательно соединенные пульт 10 управления оператора, второй сумматор 5, четвертый переключатель 14 и второй интегрирующий усилитель 15. Первый операционный усилитель 7, второй переключатель 6 и масштабирующий усилитель 8 обеспечивают плавность перевода блока на управляющий сигнал, поступающий с первого выхода пульта 10 в момент переключения его из автоматического режима управления на ручной. Через третий сумматор 11 и четвертый сумматор 12 оба контура блока связаны таким образом, чтобы обеспечивалось постоянное выравнивание выходных сигналов регулятора 3 и интегрирующего усилителя 15, что, в свою очередь, гарантирует неизменность положения исполнительного механизма 4 при переключениях его переключателем 13 от одного контура системы к другому при переходах от автоматического режима на ручной и обратно. Каждый из двух контуров блока способен работать автономно, например отказ регулятора 3 не нарушает способность блока работать в ручном режиме управления и, наоборот, отказ интегрирующего усилителя 15 не влияет на способность блока работать в автоматическом режиме.
Таким образом, предлагаемый блок ручного резервирования позволяет осуществлять непрерывный процесс управления технологическим объектом даже при отказе регулятора, что в два раза повышает надежность управления.
Предлагаемый блок ручного резервирования может найти широкое применение при регулировании технологических процессов в различных отраслях промышленности, особенно на ответственных объектах, где даже кратковременная потеря управления не допускается.
Предлагаемый блок ручного резервирования может быть практически реализован на типовых пневматических элементах УСЕППА или на типовых электрических элементах комплекса АКЭСР. Как вариант, блок был реализован на средствах микропроцессорной техники и опробован в работе на одном из объектов нефтеперерабатывающей промышленности. Испытания подтвердили заявленный технический результат, выраженный в повышении надежности управления.
Источники информации
1. Авторское свидетельство СССР №391534, кл. G 05 В 11/28, 1971.
2. Патент США №3940594, кл. 235-150.1, заявл. 13.08.74, опублик. 24.02.74.
3. Авторское свидетельство СССР по заявке №2127665/18-24, кл. G 05 В 11/46, 1975.
4. Патент США №3662276, кл. 330-1А, заявл. 02.10.70, опублик. 09.05.72.
5. Патент Японии №51-20671, кл. 54(7) С 141, заявл. 08.07.70, опублик. 26.06.76.
6. Авторское свидетельство СССР №830289, кл. G 05 В 7/00, 1981 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1979 |
|
SU830289A1 |
| РЕГУЛЯТОР ПНЕВМОЭЛЕКТРИЧЕСКИЙ | 2005 |
|
RU2308067C2 |
| Пропорционально-интегрально-дифференциальный регулятор | 1971 |
|
SU593676A3 |
| Импульсный регулятор | 1979 |
|
SU960727A2 |
| Двухканальная следящая система с разделенной нагрузкой | 1987 |
|
SU1425597A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080115A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Система управления | 1978 |
|
SU742870A1 |
| Тренажер оператора систем управления технологическими процессами | 1983 |
|
SU1208571A1 |
Предлагаемое изобретение относится к устройствам управления, в которых обеспечивается плавное переключение с автоматического слежения за регулируемым процессом на ручное и обратно (с ручного на автоматическое) за счет формирования сигнала управления путем сравнения выходного сигнала регулятора с задаваемым сигналом ручного управления, и может быть использовано для управления объектами различного назначения. Новым в изобретении является то, что в известной системе установлены третий и четвертый переключатели, третий и четвертый сумматоры и второй интегрирующий усилитель, вход которого соединен с выходом четвертого переключателя, а выход соединен с третьим входом третьего переключателя, вторым входом второго сумматора, вторым входом третьего сумматора и вторым входом четвертого сумматора, первый вход третьего переключателя соединен с выходом регулятора, первым входом третьего сумматора и первым входом четвертого сумматора, а выход третьего переключателя соединен со входом исполнительного механизма, выход третьего сумматора соединен с третьим входом первого переключателя, выход четвертого сумматора соединен с первым входом четвертого переключателя, а второй вход четвертого переключателя соединен с выходом второго сумматора. Конструктивные особенности предлагаемого изобретения позволяют получить технический результат, выраженный в повышении надежности управления. 1 ил.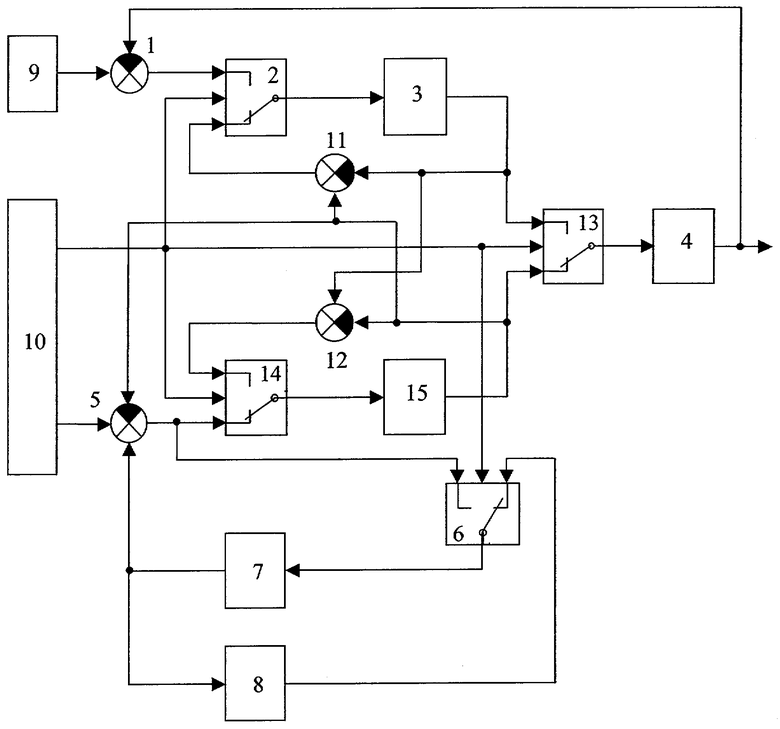
Блок ручного резервирования, содержащий последовательно соединенные задатчик, первый сумматор, первый переключатель, исполнительный механизм, выход которого соединен со вторым входом первого сумматора, и пульт управления оператора, первый выход которого соединен с первым входом второго сумматора, выход которого через второй переключатель соединен со входом интегрирующего усилителя, выход которого соединен со входом масштабирующего усилителя и с третьим входом второго сумматора, а выход масштабирующего усилителя соединен с третьим входом второго переключателя, управляющие входы переключателей соединены со вторым выходом пульта управления оператора, отличающийся тем, что, с целью повышения надежности, в нем установлены третий и четвертый переключатели, третий и четвертый сумматоры и второй интегрирующий усилитель, вход которого соединен с выходом четвертого переключателя, а выход соединен с третьим входом третьего переключателя, вторым входом второго сумматора, вторым входом третьего сумматора и вторым входом четвертого сумматора, первый вход третьего переключателя соединен с выходом регулятора, первым входом третьего сумматора и первым входом четвертого сумматора, а выход третьего переключателя соединен со входом исполнительного механизма, выход третьего сумматора соединен с третьим входом первого переключателя, выход четвертого сумматора соединен с первым входом четвертого переключателя, а третий вход четвертого переключателя соединен с выходом второго сумматора.
| Система управления | 1979 |
|
SU830289A1 |
| Аналоговое регулирующее устройство | 1975 |
|
SU744442A1 |
| US 3662276 А, 09.05.1972. | |||

