Изобретение относится к области гидроакустики, связанной с приемом широкополосных сигналов, и может быть использовано при шумопеленговании, гидролокации, обнаружении гидроакустических сигналов, классификации, для гидроакустической связи, для подводных геофизических работ.
В современной гидроакустике прием сигналов ведется веером диаграмм направленности (ДН) или сканирующей ДН, при этом направление на источник сигнала определяется направлением максимума ДН. Спектральный состав сигналов, излученных различными источниками в гидроакустике, простирается от единиц Гц до десятков кГц [1]. Для обнаружения и пеленгования представляет интерес использовать весь спектр сигнала, источника. В то же время имеются условия, ограничивающие диапазон сигналов, принимаемых одной антенной, и не дающие возможности однозначно определить направление на источник принимаемого сигнала.
Способы приема сигналов, используемых в гидроакустике, отражены в книге [2] . Определение направления на источник сигнала является одним из основных элементов приема. При этом информация о пеленге должна однозначно соответствовать истинному направлению.
Из литературы по антенной технике [3] известно, что в случае приема сигналов эквидистантной дискретной антенной, состоящей из N элементов, расстояние d между фазовыми центрами двух соседних элементов должно удовлетворять соотношению
где λ - длина волны принимаемого сигнала, θ0 - угол компенсации.
Невыполнение условия (1) ведет к появлению в ДН максимумов, равных основному, что приводит к неоднозначности определения направления на источник сигнала. Поэтому диапазон принимаемых сигналов ограничивается частотой f≤f0= cd/2 (с - скорость звука). Ниже частоты f0 в ДН не возникают дополнительные максимумы, равные основному. Появление таких дополнительных максимумов приводит к неоднозначности пеленга на цель. Таким образом, диапазон принимаемых сигналов с целью однозначного определения пеленга ограничен сверху частотой f0, что объясняется общим свойством эквидистантных антенн.
Известен способ определения направления на источник гидроакустического сигнала, включающий прием сигнала с направления главного максимума в диапазоне частот f<f0. Этот способ, широко описанный в литературе, в частности, в книге [4], является наиболее близким к предлагаемому, целесообразно взять за прототип.
Недостатками известного способа являются:
- ограничение спектра принимаемых сигналов частотой, выше которой образуются дополнительные максимумы, которые могут давать ложные пеленги на цель;
- невозможность по указанной причине работы с широкополосным сигналом выше граничной частоты из выражения (1), что необходимо при различных помехосигнальных ситуациях;
- необходимость в специальной высокочастотной антенне, если диапазон сигналов от источника выше граничного.
Отметим, что при выборе f0 в качестве верхней частоты рабочего диапазона, способ-прототип становится менее эффективным в низкочастотном диапазоне, т. к. уменьшается волновой размер антенны, что приводит к расширению луча, уменьшает коэффициент концентрации, возрастает взаимное влияние между элементами.
Задачей предлагаемого способа является расширение частотного диапазона путем устранения неоднозначности пеленга в сторону частот, на которых в диаграмме направленности приемной антенны формируются один дополнительный максимум, равный основному, или два дополнительных максимума, симметрично расположенных относительно главного максимума.
Эта задача может быть решена двумя вариантами способа, отличающимися последовательностью операций, но связанных общим изобретательским замыслом.
По первому варианту в способе, включающем прием сигнала с направления главного максимума диаграммы направленности многоэлементной эквидистантной антенны, введены новые признаки, а именно:
прием сигналов производят в диапазоне частот
где с - скорость звука, d - расстояние между элементами, θ - текущий угол, θ0 - угол компенсации, в котором в диаграмме направленности образуется один дополнительный максимум или два дополнительных максимума, расположенных симметрично относительно главного максимума; изменяют частоту приема таким образом, чтобы изменились угловые расстояния между главным максимумом и каждым дополнительным максимумом на угол, равный угловой ширине дополнительного максимума на уровне - 3 дБ. Если сигнал после изменения частоты принят, то направление прихода сигнала определяют как направление главного максимума диаграммы направленности. Если сигнал после изменения частоты не принят, то направление его прихода соответствует положению оси одного из дополнительных максимумов на первоначальной частоте приема. Для уточнения направления при наличии двух дополнительных максимумов на измененной частоте приема поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов с его первоначальным направлением. При фиксации сигнала это направление определяют как направление прихода сигнала от источника, а отсутствие сигнала - как направление другого дополнительного максимума на первоначальной частоте приема.
По второму варианту в способе, включающем прием сигнала с направления главного максимума диаграммы направленности многоэлементной эквидистантной антенны, введены следующие новые признаки:
прием производят одновременно на двух различных частотах fa, fb, при этом каждая из частот fa, fb удовлетворяет условию
где с - скорость звука, d - расстояние между элементами, θ - текущий угол, θ0 - угол компенсации; в котором в диаграмме направленности образуется один дополнительный максимум или два дополнительных максимума, расположенных симметрично относительно главного максимума, причем на частоте fb угловое расстояние между главным максимумом и каждым из дополнительных максимумов отличается от аналогичного расстояния на частоте fa на угол, не меньший угловой ширины дополнительного максимума. Если сигнал принят на обеих частотах, направление прихода сигнала определяют как направление главного максимума, если на одной из частот - как направление дополнительного максимума на данной первой частоте, для уточнения направления при наличии двух дополнительных максимумов поворачивают ДН на второй частоте до совпадения одного из дополнительных максимумов с направлением дополнительного максимума на первой частоте, где сигнал принят. При приеме сигнала на второй частоте это направление определяют как направление прихода сигнала от источника, а при отсутствии - как направление другого дополнительного максимума на первой частоте.
Первый вариант предлагаемого способа характеризуется последовательностью действий: первоначальная фиксация факта приема сигнала от источника, изменение частоты приема, поворот ДН для уточнения направления при наличии двух дополнительных максимумов, расположенных симметрично по обе стороны от главного максимума. По второму варианту прием ведется одновременно на двух частотах, а затем для уточнения направления производится поворот ДН. Таким образом, во втором варианте заявляемого способа определение направления на источник сигнала производится быстрее, но в этом варианте требуется организация двух каналов приема.
Техническими результатами от использования предлагаемых вариантов способа являются:
- расширение в два и более раз полосы частот (в сторону более высоких частот), в диапазоне которых однозначно определяется направление на источник сигнала при одинаковых волновых размерах между элементами антенны;
- возможность обострить диаграмму направленности и увеличить точность пеленгования при работе на более высоких частотах;
- увеличение в 2-3 раза сектора активного обзора, т.к. одновременно формируются два (три) луча;
- уменьшение числа активных элементов антенны, количества каналов, стоимости при одном и том же общем волновом размере антенны.
Рассмотрим физическое обоснование достижения указанных технических результатов.
Диаграмма направленности эквидистантной антенной решетки записывается в виде:
Условие достижения максимума (3), равного главному максимуму:
πd(sinθ-sinθ0)/λ = nπ, n=0, ±1, ±2, ... (4)
n=0 - в случае главного максимума ДН.
Из (4) следует, что первые дополнительные максимумы имеют место при n= ±1,
или
d/λ = ±1/(sinθ-sinθ0), (5)
а частоты, на которых появляются эти максимумы:
Выражение (6) определяет верхнюю граничную частоту f0 однолепестковой ДН. Если частота диапазона f<f0, имеется единственный максимум ДН (главный); если f>f0, появляются дополнительные максимумы, их положение находится при решении уравнения (6) при заданных d, f≥f0, θ:
θ1,2 = arcsin(±c/(fd)+sinθ0) (7)
Найдем верхнюю граничную частоту fв такую, что при f>fв с одной стороны главного максимума (или симметрично с двух сторон) появляются два дополнительных максимума. Такая ситуация имеет место при n=±2, тогда
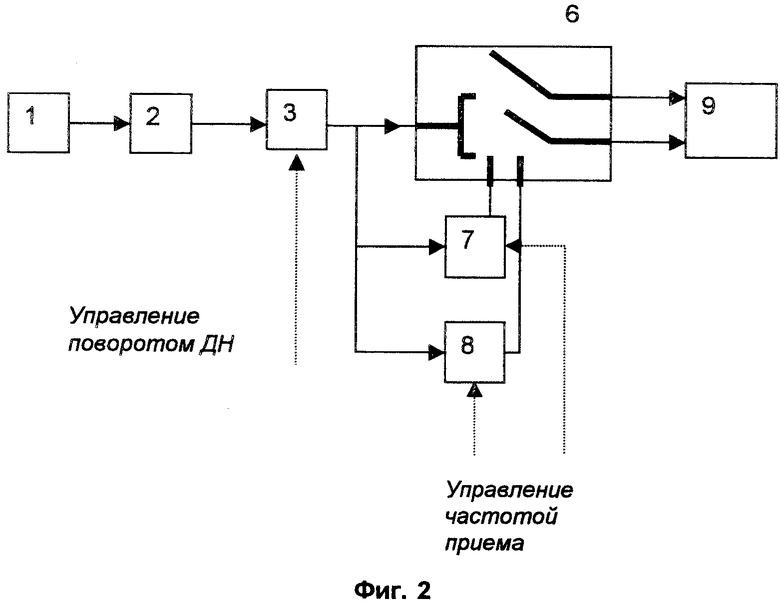
Сущность изобретения поясняется фиг. 1, 2, 3, 4. На фиг.1 приведена обобщенная структурная схема, реализующая первый вариант способа, на фиг.2 - структурная схема, реализующая второй вариант способа. На фиг.3 - пояснение способа при наличии в ДН одного дополнительного максимума, на фиг.4 - при двух дополнительных максимумах.
Устройство (фиг.1), предназначенное для реализации первого варианта заявляемого способа, содержит последовательно соединенные многоэлементную антенну 1, многоканальный широкополосный усилитель 2, линию задержки 3, управляемый узкополосный фильтр 4, а также регистратор (дисплей, рекордер) 5 и переключатель 6. Устройство (фиг.2) - для второго варианта, кроме блоков 1, 2, 3, 6, одинаковых с блоками фиг.1, содержит управляемые фильтры 7 и 8 на частоты fa и fb, соответственно, а также двухканальный регистратор 9.
Антенна 1 предназначена для формирования диаграммы направленности, преобразования акустической энергии в электрическую. Многоканальный усилитель 2 усиливает электрический сигнал, одновременно ограничивая полосу пропускания частотой fв. Линия задержки 3 предназначена для поворота ДН и управляется внешними сигналами. Управляемые узкополосные фильтры 4, 7, 8 выделяют из общей полосы принимаемого широкополосного сигнала сигнал необходимой частоты fa(f1,2) или fb. Переключатель 6 в режиме обнаружения напрямую соединяет линию задержки с регистратором, в режиме уточнения направления, после обнаружения сигнала от цели в широкой полосе, переключатель переключают в положение, когда после линии задержки сигнал проходит узкополосный фильтр 4 или фильтры 7, 8, после чего поступает на регистратор. Регистраторы 5, 9 отображают принятую информацию и дают возможность оператору принимать решения. На регистраторе отображаются координаты цели, в том числе угловые, спектры принимаемых сигналов, а также другая информация.
Для большей наглядности демонстрации принципа действия структурные схемы представлены в виде аналоговых устройств. Современные способы позволяют запоминать необходимые частоты, направления, в которых на этих частотах формируются дополнительные максимумы, осуществлять поворот ДН на заданный угол без помощи оператора. В представленных вариантах возможной реализации устройств опущены элементы управления, т.к. присутствие таких блоков усложняет схему, дополнительно не иллюстрируя предлагаемый способ. Антенна и другие блоки устройства, представленные на фиг.1 и 2, хорошо известны из литературы по гидроакустической аппаратуре [2].
Рассмотрим на примерах последовательность действий по предлагаемому способу.
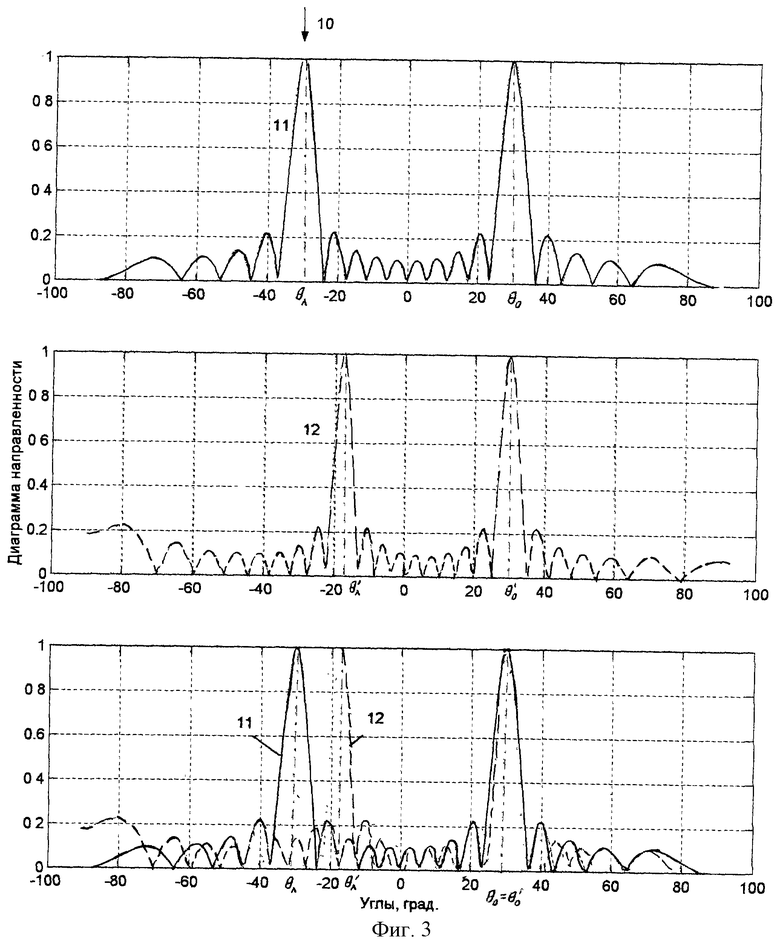
Пример 1. Антенна состоит из N=10 ненаправленных элементов, расположенных на расстоянии d=0,25 м. Сканирование в пределах углов θ0∈.(0,30°). Из формулы (4) при n=1 определяют частоту f0, положив θ0 = 30°, θ = 90° получают f0=4 кГц. Частоту fв находят с помощью выражения (8): fв=8 кГц. Таким образом, в диапазоне частот 4<f<8 кГц образуется не более двух дополнительных максимумов. Расчеты показывают, что на самом деле образуется один дополнительный максимум, равный основному.
На фиг.3 приведена расчетная ДН (кривая 11), направление главного максимума θ0, направление дополнительного максимума, который находится слева от главного, обозначено θл, в данном примере θл = -30°.
При первом варианте способа обнаружение производится с помощью регистратора 5. Сигнал приходит с направления, показанного на фиг.3 стрелкой 10. Подключив фильтр 4 для уточнения направления, настраивают его на частоту f1=6 кГц. Ширина дополнительного максимума, определяемая по формуле (3), составляет Δθ0,7 = 6°. Частота f2 должна быть выбрана такой, чтобы "отстроиться" от дополнительного максимума на f=f1, что достигается настройкой фильтра 4 на частоту f2=7,5 кГц - кривая 12, фиг.3. Видно, что диаграммы 11 и 12 достаточно разнесены, дополнительный максимум на частоте f2 имеет направление  Сигнал на частоте f2 не регистрируется. Следовательно, сигнал приходит с направления θл, т.к. при изменении частоты приема
Сигнал на частоте f2 не регистрируется. Следовательно, сигнал приходит с направления θл, т.к. при изменении частоты приема 
При втором варианте приема после обнаружения сигнала подключают с помощью переключателя 6 фильтры 7 и 8, настроенные на частоты fa=6 кГц, fb=7,5 кГц, сигнал регистрируется двухканальным регистратором 9 только в канале, настроенном на частоту fa. Следовательно, сигнал приходит с направления дополнительного максимума по этой частоте, и направление на него -30o.
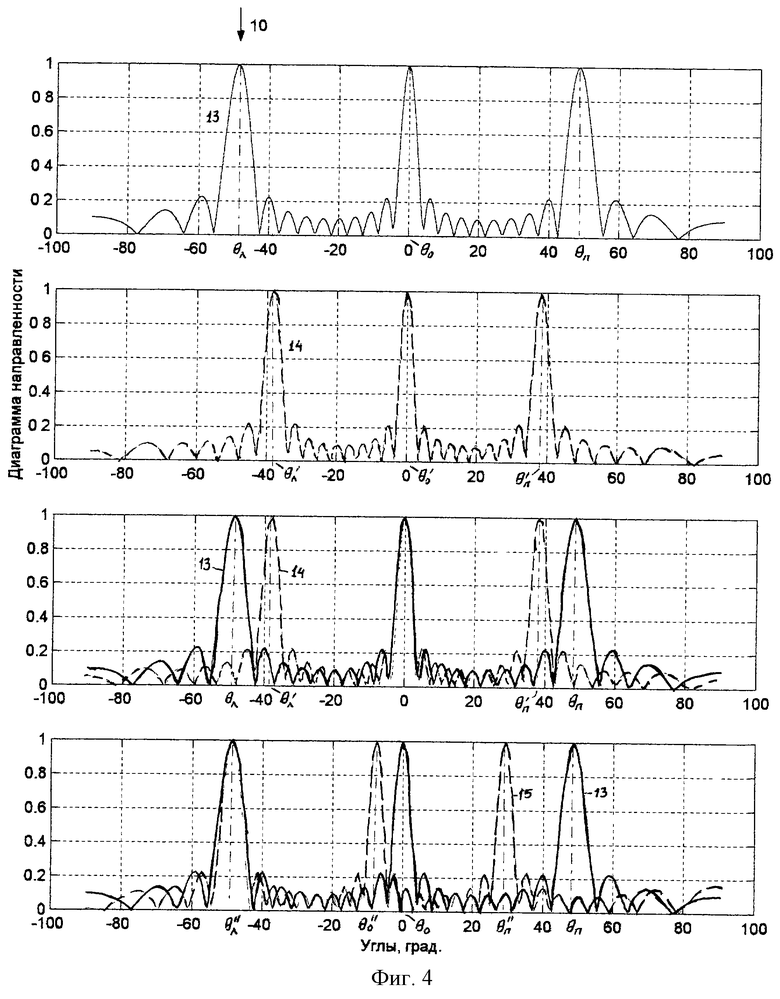
Пример 2. N= 10, d= 0.25 м, случай механического сканирования, т.е. θ0 = 0°.
Из выражения (4) определяется f0= 6 кГц, из (8) находится fв=12 кГц. Следовательно, в диапазоне 6<f<12 кГц образуются не более двух дополнительных максимумов, симметрично расположенных относительно главного максимума. Расчеты показывают, что образуются два дополнительных максимума, равных основному. Расчетная ДН приведена на фиг.4, кривая 13, направление главного максимума θ0, направление дополнительного максимума, который находится слева от главного обозначено θл, справа -  ширина дополнительного максимума Δθ0,7 = 6°. Направление прихода сигнала - по стрелке 10.
ширина дополнительного максимума Δθ0,7 = 6°. Направление прихода сигнала - по стрелке 10.
По первому варианту предлагаемого способа, обнаружив сигнал, для уточнения направления подключают фильтр 4 с помощью переключателя 6 и настраивают фильтр на частоту f1=8 кГц. При этом положение дополнительных максимумов θл = -48,5°, θп = +48,5°. Переключают фильтр 4 на частоту f2=9,7 кГц, обеспечивающую сдвиг дополнительных максимумов в положения  (кривая 14, фиг.4). В соответствии с изображенной на фиг.4 ситуацией сигнал на частоте f2 не регистрируется, следовательно, направление на него θл или θп. Сдвигают диаграмму направленности антенны 1 на угол δθ, равный угловому расстоянию между осями дополнительных максимумов на частотах f1 и f2, в данном случае
(кривая 14, фиг.4). В соответствии с изображенной на фиг.4 ситуацией сигнал на частоте f2 не регистрируется, следовательно, направление на него θл или θп. Сдвигают диаграмму направленности антенны 1 на угол δθ, равный угловому расстоянию между осями дополнительных максимумов на частотах f1 и f2, в данном случае  После поворота ДН занимает положение 15, а направления осей максимумов становятся следующими:
После поворота ДН занимает положение 15, а направления осей максимумов становятся следующими:  причем
причем  Сигнал от цели регистрируется, и направление на него θл = -48,5°. Если бы сигнал отсутствовал, направление на него было бы θп = 48,5°.
Сигнал от цели регистрируется, и направление на него θл = -48,5°. Если бы сигнал отсутствовал, направление на него было бы θп = 48,5°.
Последовательность действий по второму варианту предлагаемого способа в данном примере с двумя дополнительными максимумами отличается от последовательности действий по первому способу тем, что после подключения узкополосных фильтров 7, 8 переключателем 6 и настройки фильтров на частоты fa, fb, поворот ДН осуществляется на частоте fb.
Из представленных примеров видно, что с помощью простых операций и при небольших аппаратных затратах можно однозначно определить направление на источник сигнала при наличии дополнительных максимумов диаграммы направленности.
Литература
1. Р. Дж. Урик. Основы гидроакустики. Л.: Судостроение, 1978, с.347-359.
2. Справочник по гидроакустике. Л.: Судостроение, 1988, с. 14-35.
3. Л.В. Орлов, А.А. Шабров. Гидроакустическая аппаратура рыбопоискового флота. Л.: Судостроение, 1987, с.99-101.
4. В. Б. Митько, А.П. Евтютов, С.Е. Гущин. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982, с.33-34.
Изобретение относится к области гидроакустики, связанной с приемом широкополосных сигналов, и может быть использовано при шумопеленговании, гидролокации, обнаружении гидроакустических сигналов, классификации, для гидроакустической связи, для подводных геофизических работ. Техническими результатами от использования предлагаемых вариантов способа являются расширение полосы частот, в диапазоне которых однозначно определяется направление на источник сигнала при одинаковых волновых размерах между элементами антенны, увеличение точности пеленгования, уменьшение числа активных элементов антенны, количества каналов, стоимости при одном и том же общем волновом размере антенны. Для достижения технических результатов предложено два варианта способа. По первому варианту способа, который включает прием сигнала с направления главного максимума диаграммы направленности многоэлементной эквидистантной антенны, прием сигналов производят в диапазоне частот
где с - скорость звука, d - расстояние между элементами, θ - текущий угол, θ0 - угол компенсации. В этом диапазоне частот в диаграмме направленности образуются еще один или два симметрично расположенных относительно главного дополнительных максимума. Изменяют частоту приема до изменения угловых расстояний между главным и каждым из дополнительных максимумов на угол, не меньший угловой ширины дополнительного максимума по уровню -3 дБ. Если сигнал принят, направление прихода сигнала определяют как направление главного максимума, если не принят - как направление дополнительного. Для уточнения направления при наличии двух дополнительных максимумов на измененной частоте приема поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов с первоначальным. При фиксации сигнала это направление определяют как направление прихода сигнала от источника, а при его отсутствии - как направление другого дополнительного максимума на первоначальной частоте приема. По второму варианту способа прием производят одновременно на двух различных частотах fa, fb, при этом каждая из частот fa, fb удовлетворяет условию (1). Если сигнал принят на обеих частотах, направление прихода сигнала определяют как направление главного максимума, если на одной из частот - как направление дополнительного максимума на данной первой частоте. Для уточнения направления при наличии двух дополнительных максимумов поворачивают ДН на второй частоте до совпадения одного из дополнительных максимумов с направлением дополнительного максимума на первой частоте, где сигнал принят. При приеме сигнала на второй частоте это направление определяют как направление прихода сигнала от источника, а при отсутствии - как направление другого дополнительного максимума на первой частоте. 2 с.п. ф-лы, 4 ил.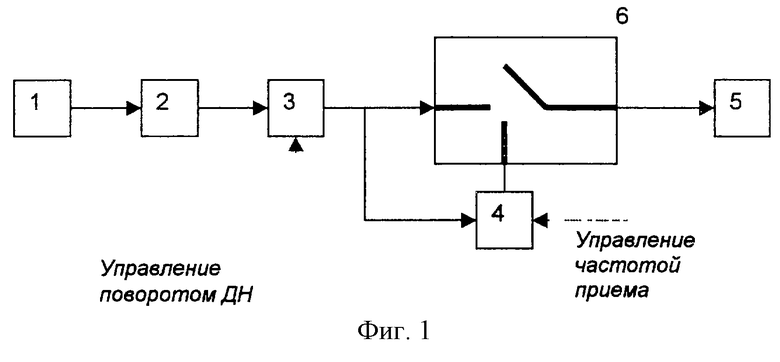
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации, в котором в диаграмме направленности образуются еще один или два симметрично расположенных относительно главного дополнительных максимума, изменяют частоту приема до изменения угловых расстояний между главным и каждым из дополнительных максимумов на угол, не меньший угловой ширины дополнительного максимума по уровню -3 дБ, если сигнал принят, направление прихода сигнала определяют как направление главного максимума, если не принят - как направление дополнительного, для уточнения которого при наличии двух дополнительных максимумов на измененной частоте приема поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов с первоначальным и при фиксации сигнала это направление определяют как направление прихода сигнала от источника, а при его отсутствии - как направление другого дополнительного максимума на первоначальной частоте приема.
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации,
на каждой из частот в диаграмме направленности образуются еще один или два симметрично расположенных относительно главного дополнительных максимумов, причем на частоте fb угловое расстояние между главным максимумом и каждым из дополнительных максимумов отличается от аналогичного расстояния на частоте fa на угол, не меньший угловой ширины дополнительного максимума, если сигнал принят на обоих частотах, направление прихода сигнала определяют как направление главного максимума, если на одной из частот - как направление дополнительного максимума на данной первой частоте, для уточнения направления при наличии двух дополнительных максимумов поворачивают ДН на второй частоте до совпадения одного из дополнительных максимумов с направлением дополнительного максимума на первой частоте, где сигнал принят, при приеме сигнала на второй частоте это направление определяют как направление прихода сигнала от источника, а при отсутствии - как направление другого дополнительного максимума на первой частоте.
| МИТЬКО В.Б | |||
| и др | |||
| Гидроакустические средства связи и наблюдения | |||
| - Л.: Судостроение, 1982, с.33-34 | |||
| US 5570323 A, 29.10.1996 | |||
| US 5732043 A, 24.03.1998 | |||
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |

