Текст описания в факсимильном виде (см. графическую часть) Тб
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ГИДРОАКУСТИЧЕСКОГО СИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2196362C2 |
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2350983C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГИДРОЛОКАТОРОМ КУРСОВОГО УГЛА ОБНАРУЖЕННОГО ОБЪЕКТА | 2015 |
|
RU2610520C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЧАСТОТНО-НЕЗАВИСИМОЙ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ РАБОЧИМ СЕКТОРОМ МНОГОЭЛЕМЕНТНОЙ ГИДРОАКУСТИЧЕСКОЙ ИЗЛУЧАЮЩЕЙ КРУГОВОЙ АНТЕННЫ | 2005 |
|
RU2293357C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
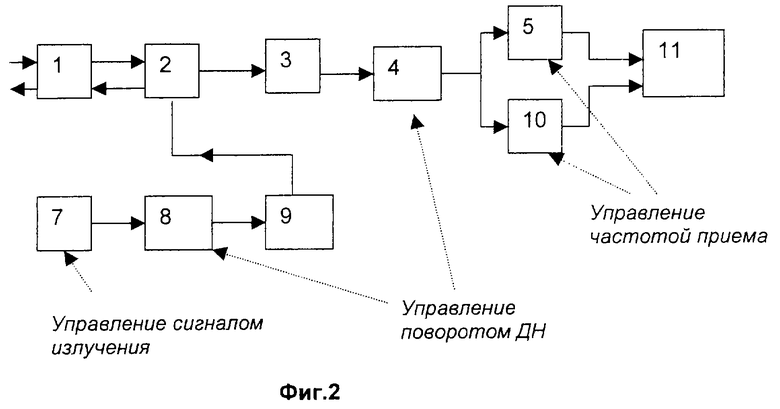
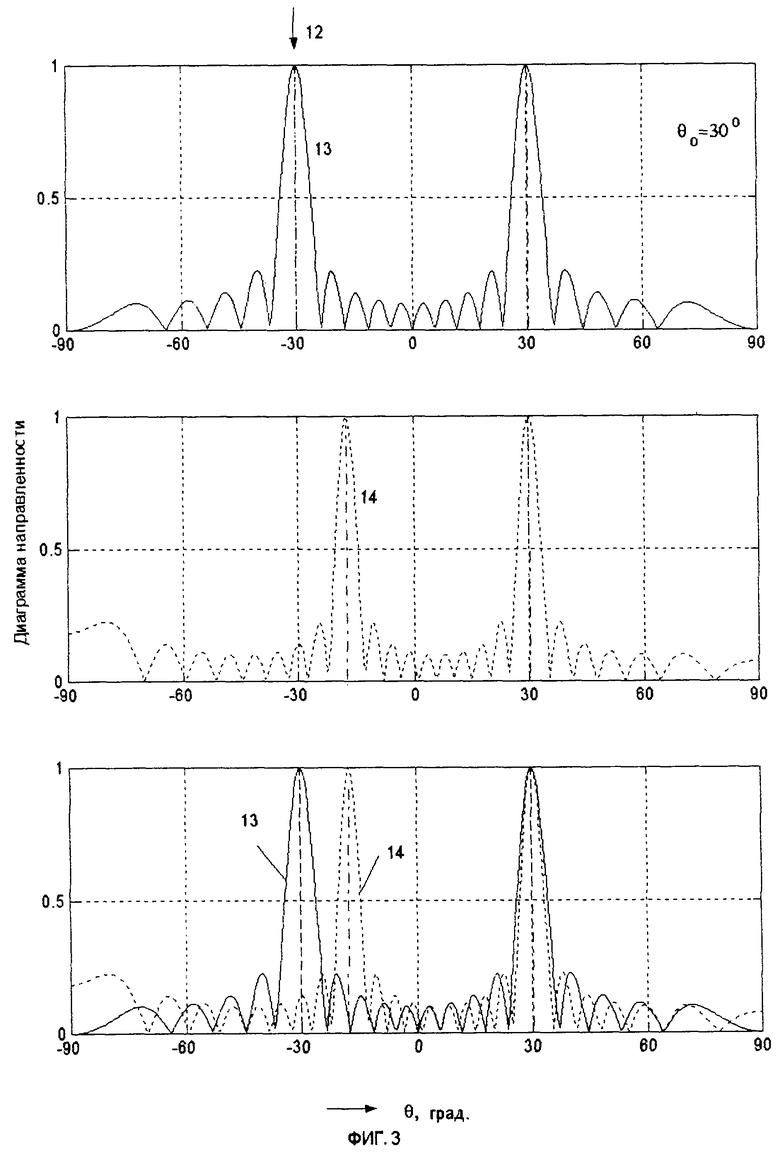
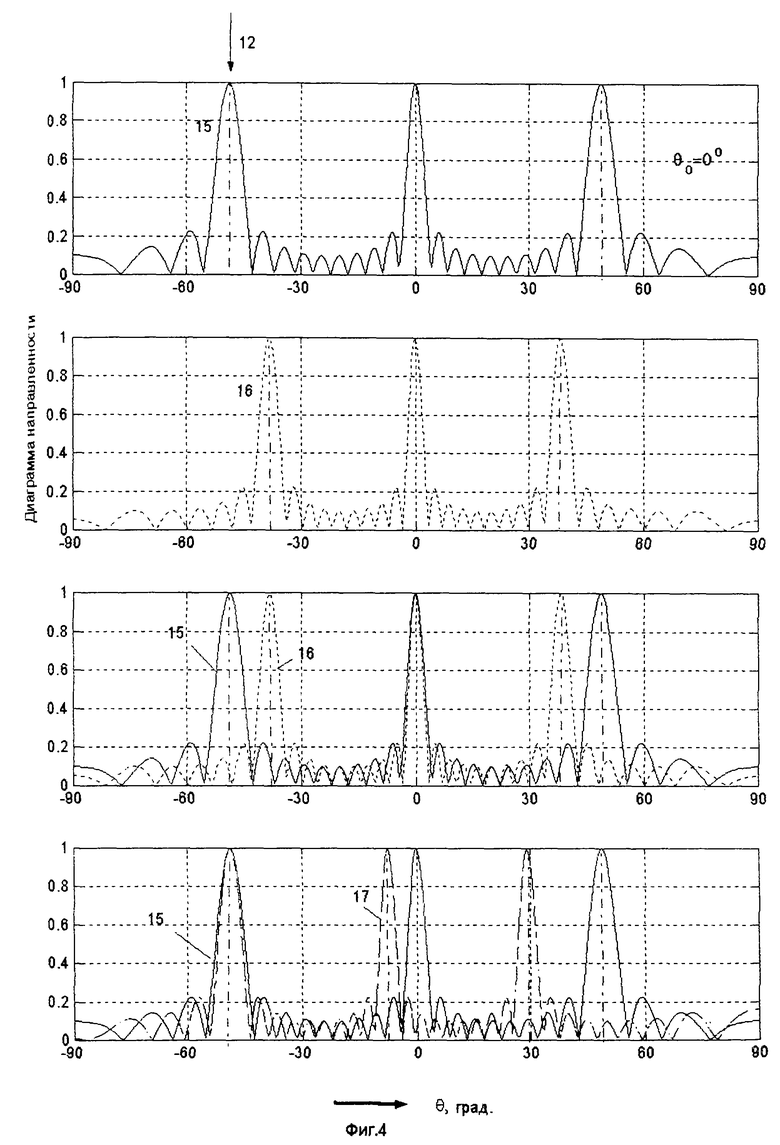
Изобретение относится к области гидроакустики, а именно гидролокации, и может быть использовано при обнаружении объектов в активном режиме. Техническими результатами от использования предлагаемых вариантов способа являются: увеличение точности и возможности пеленгования; расширение в два и более раз полосы частот (в сторону более высоких частот), в диапазоне которых однозначно определяется направление прихода эхосигнала при одинаковых волновых размерах между элементами антенны. Для достижения этих технических результатов предложены следующие варианты способа. Излучение в импульсном режиме и прием сигнала с направления главного максимума диаграммы направленности приемоизлучающей многоэлементной эквидистантной антенны, излучение и прием сигналов производят в соответствующем диапазоне частот. В этом диапазоне частот в диаграмме направленности образуются еще один или два симметрично расположенных относительно главного дополнительных максимума. Если эхосигнал принят, направление прихода эхосигнала определяют как направление главного максимума, если не принят - как направление дополнительного максимума. Для уточнения направления при наличии двух дополнительных максимумов на измененной частоте поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов с первоначальным, производят излучение на измененной частоте и при фиксации эхосигнала это направление определяют как направление прихода эхосигнала, а при его отсутствии - как направление другого дополнительного максимума на первоначальной частоте. Излучение и прием сигналов производят последовательно или одновременно на двух различных частотах fа, fb. Если эхосигнал принят на обоих частотах, направление прихода эхосигнала определяют как направление главного максимума, если на одной из частот - как направление дополнительного максимума на данной первой частоте. Для уточнения направления при наличии двух дополнительных максимумов поворачивают диаграмму направленности на второй частоте до совпадения одного из дополнительных максимумов с направлением дополнительного максимума на первой частоте, где сигнал принят, производят излучение. При приеме эхосигнала на второй частоте это направление определяют как направление прихода эхосигнала, а при отсутствии - как направление другого дополнительного максимума на первой частоте. 4 с.п.ф-лы, 4 ил.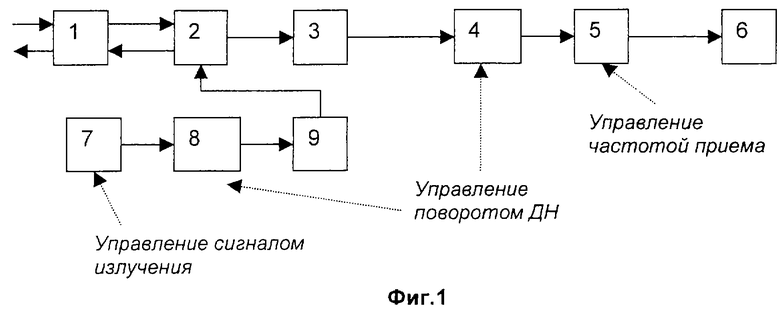
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации, в котором в диаграмме направленности образуется один дополнительный максимум,
изменяют частоту излучения до изменения углового расстояния между главным и дополнительным максимумом на угол, не меньший угловой ширины дополнительного максимума по уровню -3 дБ, если эхосигнал принят на измененной частоте, направление прихода эхосигнала определяют как направление главного максимума, если не принят - как направление дополнительного максимума, при этом суммарный интервал времени Т между началом излучения и принятием решения о направлении прихода эхосигнала должен быть

где D - дистанция между гидролокатором и объектом;
νn - поперечная скорость объекта относительно гидролокатора;
α - полуширина максимума диаграммы направленности, на направлении которого принят эхосигнал.
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации, в котором в диаграмме направленности образуются два дополнительных максимума, расположенных по обе стороны от главного максимума,
изменяют частоту излучения до изменения углового расстояния между главным и каждым из дополнительных максимумов на угол, не меньший угловой ширины дополнительного максимума по уровню -3 дБ, если эхосигнал принят на измененной частоте, направление прихода эхосигнала определяют как направление главного максимума, если не принят - как направление одного из дополнительных максимумов, для уточнения направления которого на измененной частоте поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов с его положением на первоначальной частоте, производят излучение на измененной частоте и при фиксации эхосигнала это направление определяют как направление прихода эхосигнала, а при его отсутствии - как направление другого дополнительного максимума на первоначальной частоте, при этом суммарный интервал времени Т между началом излучения и принятием решения о направлении прихода эхосигнала должен быть

где D - дистанция между гидролокатором и объектом;
νn - поперечная скорость объекта относительно гидролокатора;
α - полуширина максимума диаграммы направленности, на направлении которого принят эхосигнал.
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации,
на каждой из частот в диаграмме направленности образуется еще один дополнительный максимум, при этом угловое расстояние между главным максимумом и дополнительным максимумом на частоте fа отличается от аналогичного расстояния на частоте fb на угол, не меньший угловой ширины дополнительного максимума, если эхосигнал принят на обоих частотах fа и fb, направление прихода эхосигнала определяют как направление главного максимума, если на одной из частот - как направление дополнительного максимума на данной частоте приема эхосигнала, при этом суммарный интервал времени Т между началом излучения и принятием решения о направлении прихода эхосигнала должен быть

где D - дистанция между гидролокатором и объектом;
νn - поперечная скорость объекта относительно гидролокатора;
α - полуширина максимума диаграммы направленности, на направлении которого принят эхосигнал.
где с - скорость звука;
d - расстояние между элементами;
θ - текущий угол;
θ0 - угол компенсации,
на каждой из частот в диаграмме направленности образуются два дополнительных максимума, расположенных по обе стороны от главного максимума, причем на частоте fа угловое расстояние между главным максимумом и каждым из дополнительных максимумов отличается от аналогичного расстояния на частоте fb на угол, не меньший угловой ширины дополнительного максимума, если эхосигнал принят на обоих частотах fа и fb, направление прихода эхосигнала определяют как направление главного максимума, если эхосигнал принят только на одной из частот fа, для уточнения направления поворачивают диаграмму направленности до совпадения одного из дополнительных максимумов на другой частоте fb с направлением дополнительного максимума на частоте fа, на которой эхосигнал принят, производят излучение сигнала и при приеме эхосигнала на частоте fb это направление определяют как направление прихода эхосигнала, а при отсутствии - как направление другого дополнительного максимума на частоте fа, при этом суммарный интервал времени Т между началом излучения и принятием решения о направлении прихода эхосигнала должен быть

где D - дистанция между гидролокатором и объектом;
νn - поперечная скорость объекта относительно гидролокатора;
α - полуширина максимума диаграммы направленности, на направлении которого принят эхосигнал.
| МИТЬКО В.Б | |||
| и др | |||
| Гидроакустические средства связи и наблюдения | |||
| - Л.: Судостроение, 1982, с.33, 34 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1995 |
|
RU2115940C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |
| ОПТИМИЗИРОВАННЫЙ ЧАСОВОЙ МЕХАНИЗМ | 2017 |
|
RU2743149C2 |
| US 5333129, 26.07.1994. | |||

