Изобретение относится к телемеханике, а точнее к схемам управления электроприводами, и может быть использовано для прецизионного управления исполнительными механизмами с электромагнитными и другими приводами.
Известно устройство управления электромагнитным приводом коммутационного аппарата, которое может быть использовано для управления исполнительным механизмом, содержащее источник управляющего напряжения, блок электропривода исполнительного механизма, первый вывод обмотки которого соединен с первым выводом источника управляющего напряжения [1].
Недостатком известного устройства является низкая точность преобразования напряжения источника управляющего напряжения в ток, протекающий через обмотку электромагнита.
Как известно, сопротивление обмотки электропривода зависит от параметров протекающего через нее тока. Эта зависимость может быть обусловлена, например, частотной зависимостью сопротивления от тока, поскольку обмотка является катушкой индуктивности, или же разогревом проводов током и зависимостью сопротивления провода от температуры (зависимость от амплитуды тока).
Действительно, при протекании тока i через металлический проводник сопротивлением R0 в проводнике выделяется тепловая энергия
Q=i2•R0•t,
где t - время протекания тока [2].
При этом температура проводника повышается на величину
ΔT=Q/(m•C),
где m - масса проводника;
С - его удельная теплоемкость [3].
Изменение температуры проводника приводит в свою очередь к изменению его сопротивления в соответствии с формулой
ΔR = α•R0•ΔT,
где ΔR - изменение сопротивления проводника;
α - температурный коэффициент сопротивления;
R0 - начальное сопротивление проводника [2, стр. 113].
В результате изменение активного сопротивления обмотки исполнительного механизма зависит от протекающего через нее тока следующим образом:
ΔR = α•R
В общем случае с учетом активной и реактивной составляющих сопротивления ток через обмотку
i=u/Z,
где u - напряжение источника управляющего напряжения,
Z - сопротивление обмотки и подводящих проводов.
Сопротивление обмотки в свою очередь зависит от параметров протекающего через нее тока:
Z=Z0+ΔZ,
где Z0 - сопротивление обмотки и проводов в стационарном режиме,
ΔZ - изменение сопротивления обмотки и проводов при изменении параметров тока.
Тогда с учетом того, что ΔZ/Z0<<1, ток через обмотку
Отсюда видно, что ток через обмотку электромагнита не имеет линейной зависимости от напряжения, подаваемого источником управляющего напряжения.
Наиболее близким техническим решением к предлагаемому и принятым за прототип является устройство управления электромеханическим исполнительным механизмом с блоком электропривода, содержащее источник управляющего тока, шунтирующий элемент, первый и второй выводы которого и первый и второй выводы блока электропривода соединены с первым и вторым выводами источника управляющего тока соответственно [4].
Известное устройство имеет следующие недостатки.
Если шунтирующий элемент имеет сопротивление такое же или больше сопротивления обмотки электромагнита, то известное устройство имеет низкую защищенность от воздействия электромеханического резонанса [5].
Если же шунтирующий элемент имеет сопротивление меньше входного сопротивления электропривода исполнительного механизма, то влияние механического резонанса уменьшится или будет сведено на нет, но при этом преобразование тока источника управляющего тока в ток через обмотку электропривода становится нелинейным. Это обусловлено тем, что в известном устройстве сопротивление шунтирующего элемента и входное сопротивление электропривода имеют, вообще говоря, разные зависимости от параметров протекающих через них токов (амплитуды, частоты и т.п.).
В результате при изменении параметров тока источника управляющего тока изменится и пропорция в распределении токов между шунтирующим элементом и входом электропривода исполнительного механизма.
Целью изобретения является повышение точности передачи сигнала в электропривод исполнительного механизма.
Поставленная цель достигается тем, что в устройстве управления электромеханическим исполнительным механизмом с блоком электропривода, содержащем источник управляющего тока, шунтирующий элемент, первый и второй выводы которого и первый и второй выводы блока электропривода соединены с первым и вторым выводами источника управляющего тока соответственно, относительное изменение сопротивления шунтирующего элемента зависит от параметров протекающего через него тока таким же образом, что и относительное изменение входного сопротивления блока электропривода исполнительного механизма.
Кроме того, с целью расширения области применения устройства путем использования управляющего сигнала в виде напряжения источник управляющего тока может состоять из источника напряжения, первый вывод которого является первым выводом источника управляющего тока, и резистора, первый вывод которого соединен со вторым выводом источника напряжения, а второй вывод резистора является вторым выводом источника управляющего тока, причем сопротивление резистора не зависит от параметров протекающего через него тока.
Новым существенным признаком предложенного устройства по сравнению с прототипом является выполнение шунтирующего элемента с относительным изменением сопротивления, зависящим от параметров протекающего через него тока таким же образом, что и относительное изменение входного сопротивления блока электропривода исполнительного механизма.
Соответствие относительного изменения сопротивления шунтирующего элемента относительному изменению входного сопротивления блока электропривода исполнительного механизма позволяет максимально приблизить значение тока, протекающего через блок электропривода исполнительного механизма, к управляющему сигналу (току источника управляющего тока). Данный существенный признак предложенного технического решения не был обнаружен автором в доступной патентной и научно-технической литературе, где бы он проявлял те же свойства, что и в предложенном устройстве.
Дополнительные существенные признаки: выполнение источника управляющего тока на источнике напряжения и резисторе, сопротивление которого не зависит от параметров протекающего через него тока, с соответствующими связями позволяют расширить область применения предложенного устройства. Это достигается за счет того, что точность передачи входного сигнала в блок электропривода исполнительного механизма достигается не только для токового входного сигнала, но и для входного управляющего сигнала в виде напряжения.
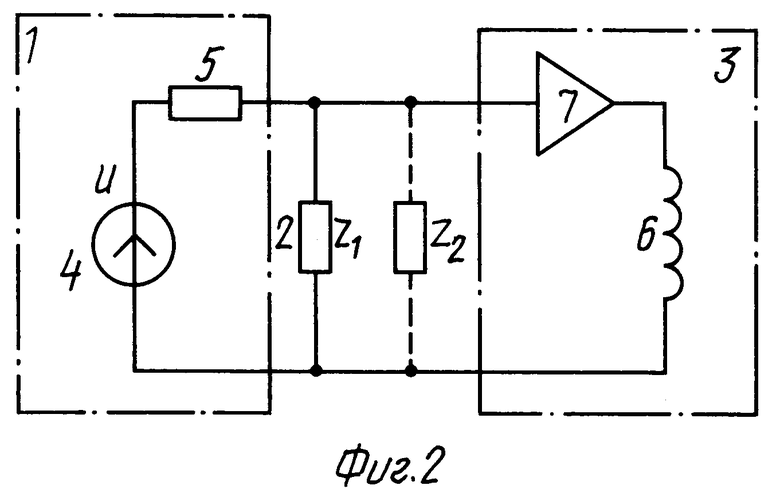
На фиг. 1 представлена электрическая схема устройства управления электромеханическим исполнительным механизмом с токовым входным сигналом; на фиг. 2 - та же схема с входным сигналом в виде напряжения и усилителем мощности в выходной цепи.
Устройство управления электромеханическим исполнительным механизмом содержит источник 1 управляющего тока, шунтирующий элемент 2, блок 3 электропривода исполнительного механизма с соответствующими связями.
Источник 1 управляющего тока может состоять из источника 4 напряжения и резистора 5.
Блок 3 может состоять из электромагнита 6 или из электромагнита 6 и усилителя 7 мощности с соответствующими связями.
Параметры шунтирующего элемента 2 (масса m, удельная теплоемкость С, температурный коэффициент сопротивления α, см. формулу (1)) подобраны таким образом, что относительное изменение сопротивления Z1 шунтирующего элемента 2 зависит от параметров протекающего через него тока таким же образом, что и относительное изменение входного сопротивления Z2 блока 3. Изготовление шунтирующих элементов 2 с широким диапазоном значений термодинамических параметров возможно на основе тонкопленочных структур, формируемых по специальной технологии [6]. Это означает, что в идеальном случае
ΔZ1/Z10 = ΔZ2/Z20 = ΔZ/Z, (3)
где ΔZ1 = Z1-Z10; ΔZ2 = Z2-Z20 - изменения сопротивлений шунтирующего элемента 2 и входного сопротивления блока 3 соответственно при одинаковом относительном изменении параметров протекающих через них токов;
Z10, Z20 - те же сопротивления в стационарном режиме.
Ток через блок 3
i=iyпp•Z1/(Z1+Z2),
где iyпp - ток источника 1.
Zj = Zj0+ΔZj = Zj0•(1+ΔZj/Zj0) =Zj0•(1+ΔZ/Z),
где j=1, 2.
В этом случае
Из последнего выражения видно, что ток i пропорционален току iyпp источника 1 с постоянным коэффициентом, не зависящим от параметров тока источника 1. В реальности добиться идеального выполнения условия (2) невозможно, можно только приблизиться к нему. Чем точнее будет это приближение, тем в большей степени будет достигаться повышение точности передачи сигнала в блок 3 электропривода исполнительного механизма
В то же время ничто не мешает сделать исходное сопротивление Z10 шунтирующего элемента 2 в несколько раз меньше сопротивления Z20 обмотки электромагнита 6. Это позволяет уменьшить влияние электромеханического резонанса электропривода за счет шунтирования его обмотки относительно малым сопротивлением шунтирующего элемента 2, т. е. осуществить электрическое демпфирование [5].
Аналогичным образом функционирует и устройство, в котором управляющим сигналом является напряжение (фиг.2). В этом случае входной ток блока 3
i=(u•Z1/(Z1+Z2))/(R+Z1•Z2/(Z1+Z2))=(u/Z2)/(1+R/Z1+R/Z2), где u - напряжение источника 4;
R - сопротивление резистора 5.
При условиях
ΔZ1/Z10 = ΔZ2/Z20 = ΔZ/Z и R = const
получим
Сравнивая эту формулу с аналогичной формулой (2) для известных устройств [1, 4] , легко заметить, что член выражения, отвечающий за нелинейность, уменьшается в (1+R/Z10+R/Z20) раз.
Таким образом, повышение точности передачи входного сигнала в электропривод достигается и в данной схеме, хотя в меньшей степени, чем для токового входного сигнала. Подавление же электромеханического резонанса в этой схеме обеспечивается так же, как и в схеме с токовым управлением.
Очевидно, что достижение положительного эффекта в предложенном устройстве достигается за счет снижения мощности, передаваемой в нагрузку (обмотку электромагнита 6). Для устранения этого недостатка в блок 3 может быть включен усилитель 7, выход которого устойчив к воздействию механического резонанса. В этом случае сопротивление шунтирующего элемента 2 должно быть согласовано с входным сопротивлением всего блока 3 в совокупности всех его элементов.
Литература
1. Патент РФ 2074430, кл. Н 01 F 7/08, от 06.09.94.
2. И.В. Савельев. Курс общей физики. - М., Наука, 1973, т. 2, стр.114.
3. X. Кухлинг. Справочник по физике. - М., Мир, 1982, стр.156.
4. Л.А. Казаков. Справочник "Электромагнитные устройства РЭА". - М., Радио и связь, 1991, стр.303 и 304, рис.10.6.б.
5. Физическая энциклопедия. - М., Сов. Энциклопедия, 1990, т. 2, стр.5, ст. "Добротность".
6. С.А. Воронов, Е.М. Онищенко, А.Б. Симаков, В.В. Сосновцев. Микроэлектронные высоковольтные предохранители для газовых пропорциональных детекторов. - Сб. тезисов докладов международной научно-технической конференции "Актуальные проблемы твердотельной электроники и микроэлектроники" ПЭМ-99.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКОВИХРЕВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2000 |
|
RU2207499C2 |
| МОДУЛЬ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА (ВАРИАНТЫ) | 1994 |
|
RU2099733C1 |
| МОДУЛЬ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА (ВАРИАНТЫ) | 1994 |
|
RU2086997C1 |
| МОДУЛЬ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА | 1996 |
|
RU2106656C1 |
| Устройство для управления асинхронным электродвигателем с тормозом | 1984 |
|
SU1246309A1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| МОДУЛЬ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА | 1994 |
|
RU2084917C1 |
| Устройство для защиты от токов утечки в сети переменного тока | 1990 |
|
SU1735958A1 |
| Электромагнит с форсировкой | 1985 |
|
SU1261017A1 |
| Электропривод транспортного средства | 1984 |
|
SU1207837A1 |
Изобретение относится к телемеханике, а точнее к схемам управления электроприводами, и может быть использовано для прецизионного управления исполнительными механизмами с электромагнитными и другими приводами. Технический результат заключается в повышении точности передачи сигнала в электропривод исполнительного механизма. В устройстве управления электромеханическим исполнительным механизмом сопротивление шунтирующего элемента 2 зависит от параметров протекающего через него тока таким же образом, что и входное сопротивление блока 3 электропривода исполнительного механизма. В результате входной ток блока 3 электропривода пропорционален току источника 1 с постоянным коэффициентом, не зависящим от параметров тока источника 1. В то же время сопротивление щунтирующего элемента может быть в несколько раз меньше сопротивления обмотки электромагнита 6. Это позволяет практически полностью подавить сигнал отдачи, идущий с обмотки электромагнита 6 на выход источника 1, возникающий из-за механического резонанса при перемещении механической части электропривода. 1 з.п. ф-лы, 2 ил.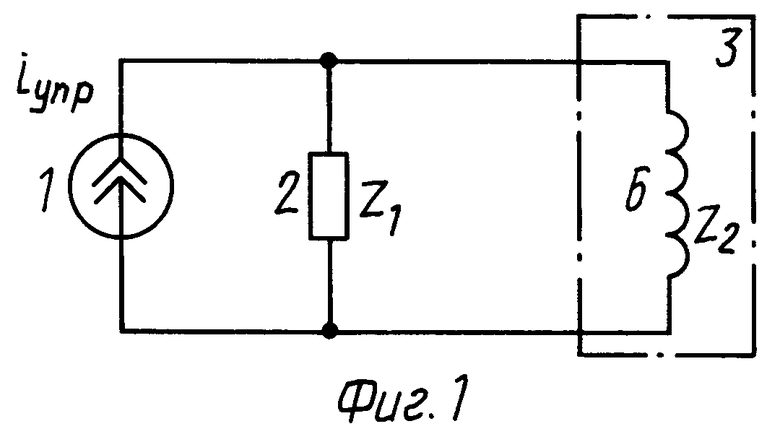
| КАЗАКОВ Л.А | |||
| Справочник Электромагнитные устройства РЭЛ | |||
| - М.: Радио и связь, 1991, с.303 и 304, рис.10.6.б | |||
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1995 |
|
RU2094877C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1996 |
|
RU2131153C1 |
| RU 2002325 A1, 30.10.1993 | |||
| СПОСОБ КОРРЕКЦИИ НЕДЕРЖАНИЯ МОЧИ ПРИ НАПРЯЖЕНИИ | 2001 |
|
RU2173960C1 |
| US 4050043 A, 30.11.1978. | |||

