Изобретение относится к новому типу электродвигателя постоянного тока, содержащему магнитные ярма с обмотками, при этом магнитное поле, приводящее во вращение ротор, создается посредством электронной коммутации обмоток магнитных ярм.
В отличие от большинства электронно-коммутируемых электродвигателей соответствующий изобретению электродвигатель не требует постоянных магнитов для создания полезного момента вращения, поэтому он более экономичен в изготовлении, чем обычные электродвигатели этого вида.
Уровень техники
Такой электродвигатель известен, например, из проспекта английской фирмы "Таск Драйвс ЛТД", Великобритания.
Этот электродвигатель имеет восемь статорных полюсов и шестиполюсный ротор, который вращается внутри статора.
Магнитный поток, создаваемый ротором, проходит через два противоположно лежащих полюса и через половину периметра статора, а также по диаметру ротора; таким образом, он проходит значительные расстояния по не имеющим обмотки железным ярмам, которые вызывают только потери.
В DOS 2953032/79 на фиг.1 показан тип электродвигателя с тремя имеющими обмотки стационарными ярмами, изолированными друг от друга.
Так как статорные полюсы смещены на 120o, т.е. лежат не противоположно друг другу, то на ротор действуют значительные радиальные силы, приводящие к преждевременному износу подшипников.
Задача изобретения
Задачей изобретения является указание нескольких возможностей создания электронно-коммутируемых электродвигателей и предложение имеющих общее значение решений относительно выполнения как магнитной цепи, так и схем коммутации с целью создания дешевых, легких электродвигателей с малыми потерями.
Решение задачи достигается идеей главного пункта формулы изобретения, при этом конструктивные детали раскрываются в зависимых пунктах формулы изобретения, соответственно, в чертежах.
Существо изобретения
Соответствующие изобретению электронно-коммутируемые синхронные реактивные электродвигатели долгое время рассматривались как уступающие по своим качествам электродвигателям с постоянными магнитами, так как энергия магнетизации ярм создается не постоянными магнитами, а должна подаваться электрическим путем каждый раз, когда электромагнитные полюса должны притягивать полюса ротора. Эта энергия в соответствии с идеей изобретения восстанавливается циклически и передается функционально следующему ярму, так как напряжение самоиндукции Ua, создаваемое энергией размагничивания ярма 11Y передается следующему ярму 11Х в качестве энергии подмагничивания. Благодаря этому достигается экономия энергии (высокий коэффициент полезного действия), а также более быстрое нарастание магнитного потока в ярмах, к которым приближаются полюса ротора, удаляющиеся от только что отключенных полюсов.
Для лучшего понимания изобретения вводится система обозначения позиций, в которых начальная цифра показывает принадлежность позиции к подгруппе, к которой принадлежит обозначаемый предмет, а именно:
- позиции элементов электродвигательного контура (который создает полезный крутящий момент) начинаются с цифры 1,
- позиции элементов электрического контура управления обмотками электродвигателя начинаются с цифры 2,
- позиции элементов контура для определения положения полюсов ротора относительно полюсов контуров электромагнитного возбуждения начинаются с цифры 3,
- позиции элементов магнитной цепи, возвращающей ротор в начальное положение (имеется не во всех вариантах), начинаются с цифры 4.
Все эти составляющие элементы в принципе известны из уровня техники в различных вариантах и являются предметом изобретения лишь в той мере, в какой они в разумных комбинациях взаимодействуют с магнитной цепью электродвигателя (железные ярма и обмотки), которая имеет существенные признаки новизны.
Магнитная цепь электродвигателя отличается тем, что на стороне магнитных ярм с обмотками (и насколько возможно на стороне ротора) используются магнитные поля, проходящие по возможно коротким путям (представлены силовыми линиями магнитного потока).
По меньшей мере 50% длины магнитной цепи ярм с обмотками находится внутри несущих ток обмоток, и таким образом позитивно влияют на возникновение магнитного потока электродвигателя.
При наиболее благоприятных условиях может достигаться перекрытие 90% длины ярм 11 обмотками.
Ярмо с обмоткой (либо ярма) располагаются симметрично относительно ротора, так что не возникают радиальные силы, а только крутящие моменты.
На фиг.1 показан общий вид соответствующего изобретению электродвигателя в качестве не ограничивающего примера выполнения.
Магнитная цепь электродвигателя состоит из двух горизонтальных магнитных ярм 11Х в форме U и двух вертикальных магнитных ярм 11Y, при этом все четыре ярма одинаковы. Каждое ярмо имеет два полюса 111, направленных в сторону ротора, которые принимают северную или южную полярность, если через главные обмотки 112 или побочные обмотки 113 протекает ток.
Таким образом имеются восемь полюсов, представляющих собой сегменты круга, внутри которого соосно вращается ротор 12.
Он имеет шесть полюсов 121, которые отделены небольшим воздушным зазором от внешних полюсов 111 и поверхность которых приблизительно равна поверхности полюсов 111, а ширина - приблизительно раскрыву двух полюсов ярм 11.
Как показано на фиг.1, если четыре роторных полюса 121 лежат напротив четырех полюсов 111 вертикальных ярм 11Y, то остальные горизонтальные внешние полюса 111X лежат напротив полюсных промежутков 122 роторных полюсов 121. Роторные полюса 121 соединены между собой роторным ярмом 123, так что они являются лишь выступами на железном пакете ротора 12, который состоит из штампованной электромагнитной листовой стали, имеющей круглую форму с выступами. Эти элементы с помощью эластичного элемента 53 закрепляются на оси электродвигателя 52.
Этот элемент изготовляется, например, из пластмассы с эластичными свойствами с целью подавления колебаний ротора и снижения его веса. Этот элемент 53 может отсутствовать, если сверление роторных стальных листов 12 запрессовывается непосредственно на ось электродвигателя 52.
Ярма 11 с обмотками образованы пакетами U-образных стальных листов, при этом толщина листов выбирается в соответствии с числом оборотов электродвигателя (частотой коммутации).
В качестве ориентировочной толщины листов ярма 11 и листов ротора можно назвать 0,1-1 мм, при этом более тонкие листы применяются для большего числа оборотов (50000 об/мин), а толстые листы - для числа оборотов 500-1000 об/мин.
В качестве дешевого материала для ярм 11 с обмотками и для ротора 12 рекомендуется кремнистая листовая сталь (для трансформаторов).
Для ярм 11 с обмоткой можно применять также стальные листы с ориентированной зернистой структурой с предпочтительным магнитным направлением в виде U-образных штампованных стальных листов (при этом предпочтительное направление проходит параллельно U-плечам) или в виде намотанных, нарезанных и отшлифованных сердечников (как для трансформаторов в разрезным ленточным сердечником). Однако такое решение дороже.
Поперечное сечение ярм в любом случае прямоугольное, что может вызывать проблемы при обмотке толстым проводом (более 1 мм2 в поперечнике). Стальные листы скреплены друг с другом и герметизированы с помощью изолирующего клея.
В специальном варианте выполнения изолирующий слой между стальными листами имеет эластичные свойства, что может служить для подавления магнитострикционных колебаний или для герметизации пакета стальных листов.
На U-образные ярма надеваются обмотки (предпочтительно предварительно изготовленные), при этом каждое ярмо содержит, по меньшей мере, одну главную обмотку 112.
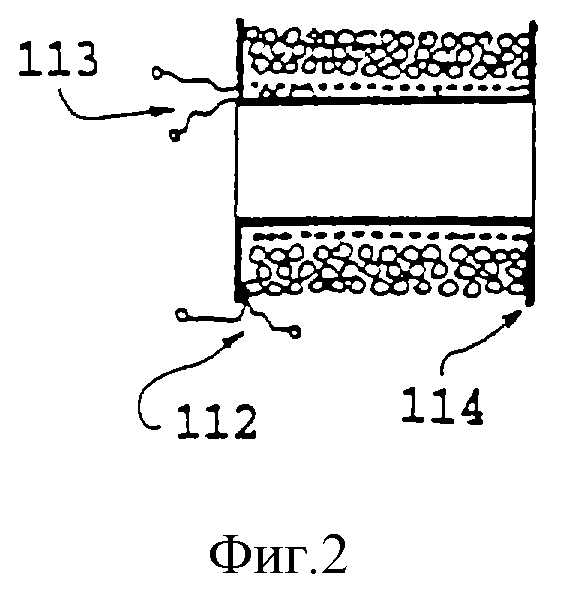
Как показано на фиг.2, эти обмотки изготавливаются обычным способом из лакированного провода с корпусом или без него (спекаемый лакированный провод).
При обычной намотке на корпусе может, например, находиться выполненная из более тонкого провода побочная обмотка 113 под главной обмоткой 112.
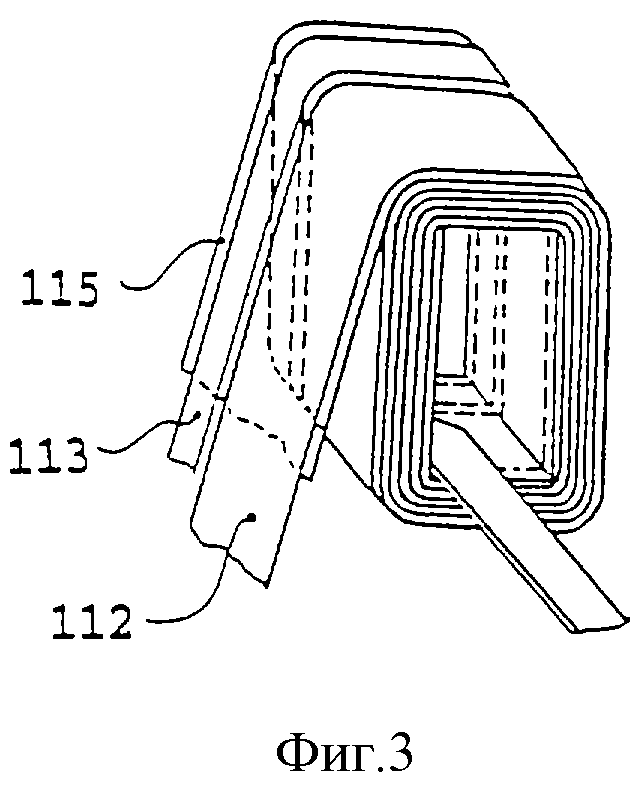
Как показано на фиг.3, в соответствии с изобретением применяется предпочтительно ленточная обмотка из изолированной или неизолированной медной или алюминиевой ленты. В последнем случае лента главной обмотки имеет одностороннюю подкладку из изолирующей пленки 115 (например, из полиэфира), ширина которой несколько больше ширины токопроводящей ленты, так что предотвращается короткое замыкание между спирально намотанными кромками металлических лент обмотки. Особенно удачным решением является одновременная намотка главной обмотки 112 и побочной обмотки 113 с меньшим поперечным сечением. В этом случае наматываются параллельно имеющие одинаковую толщину, но различную ширину ленты на достаточном расстоянии друг от друга на одной, имеющей достаточную ширину изолирующей пленке 115.
Так как при изготовлении этих обмоток используются технологии, известные по изготовлению конденсаторов и трансформаторов, то не будем описывать детали присоединения отводов и укрепления бескаркасных обмоток.
Две обмотки, описанные на примере фиг.2 и 3, надеваются на плечи ярм 111, где они могут соединяться по потребности.
Таким образом, магнитная цепь электродвигателя состоит из ярм 11 с обмотками с двумя сердечниками 11Х и 11Y, восьми главных обмоток 112 и возможно восьми побочных обмоток 113 и ротора.
Если отдельно рассматривать ярмо 11 и два роторных полюса 121 вместе с частью ярма 123, соединяющей оба полюса, и если через две обмотки 112 проходит ток, то возникает магнитный поток, соответствующий штриховой линии на фиг. 1, так что эта магнитная цепь напоминает магнитную цепь вибрационного электродвигателя бритвенного аппарата.
Если роторные полюсы 121 не лежат против полюсов 111X внешних ярм (фиг. 1) и если ярма 11Х неподвижны, то вследствие протекания тока полюсы 111X притягивают роторные полюсы 122, при этом возникает момент вращения, который поворачивает ротор 12 примерно на 30o.
Для того чтобы эти дискретные перемещения на 30o стали непрерывным вращательным движением, необходимо, чтобы подключение обмоток, расположенных в направлении осей Х и Y ярм, происходило в определенной последовательности, которая определяется контуром распознавания положения ротора 3 и преобразуется электронным контуром управления 2 в сигналы управления обмотками.
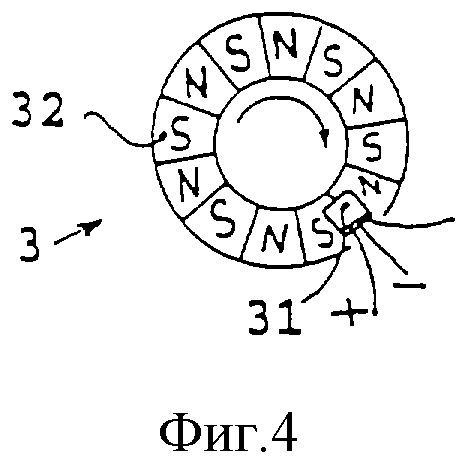
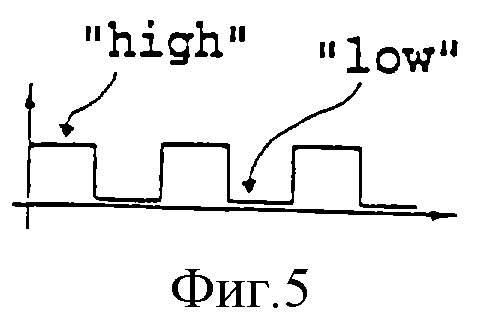
Контур распознавания положения ротора 3, который должен выдавать сигнал отключения обмоток оси X, соответственно, сигнал включения для оси Y после поворота ротора на 30o, состоит согласно фиг.4 из многополюсной магнитной шайбы 31, которая имеет шесть пар полюсов и закреплена на роторе, который движется мимо неподвижного датчика Холла 31, положение которого может изменяться с целью нахождения оптимальной рабочей точки, регулирования мощности или изменения направления вращения. Когда полюса магнитной шайбы 32 один за другим проходят мимо датчика Холла 31 (с цифровым выходом), то на его выходе возникают логические сигналы "низкий" или "высокий" в зависимости от положения ротора (фиг.5).
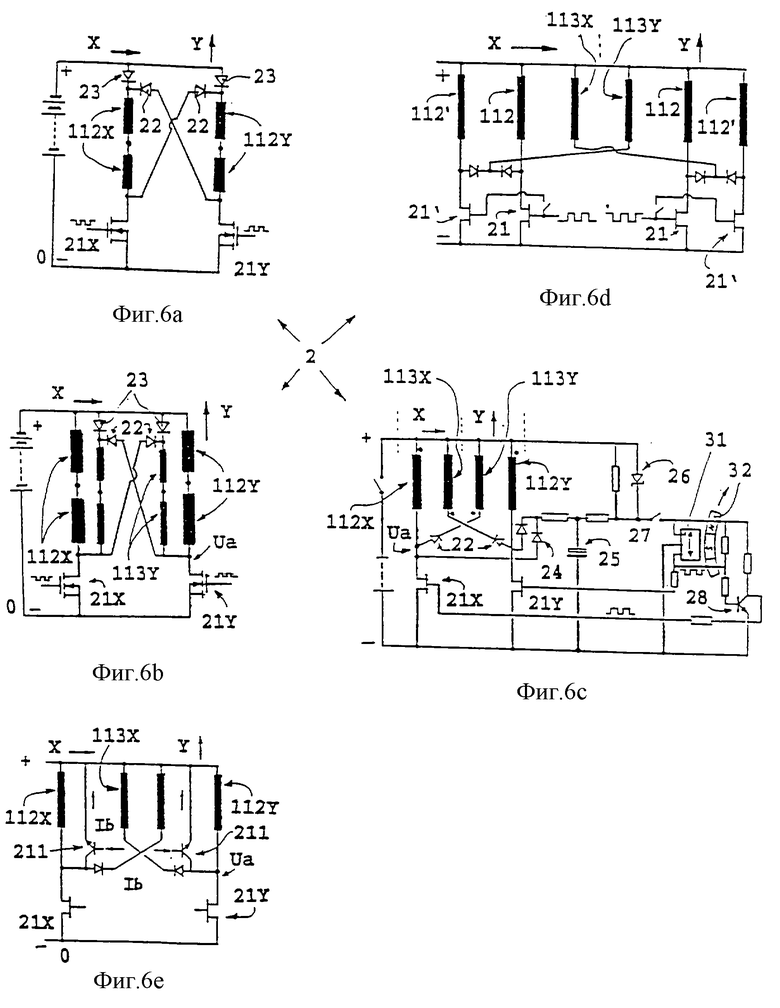
Контур управления 2 обмотками 112 и 113 состоит в основном из двух мощных транзисторов (предпочтительно полевых транзисторов MOSFET) 21X и 21Y, включенных последовательно с главными обмотками 112Х, соответственно, 112Y и внешним источником тока, питающим электродвигатель (фиг.6).
Обмотки 112, соответственно, 113Х (или Y), находящиеся на противоположных ярмах, могут быть включены последовательно или параллельно в зависимости от уровня напряжения, при котором работает электродвигатель.
Транзисторы 21X и 21Y управляются в противотакте с помощью простой электронной схемы контура определения положения ротора 3 так, что если на выходе датчика Холла присутствует сигнал "высокий", то открыт транзистор 21X, а транзистор 21Y открывается при выходном сигнале датчика Холла "низкий". Таким образом, горизонтальные ярма 11Х, соответственно, вертикальные ярма 11Y магнетизируются последовательно, так что на полюсах 111 возникает поле вращения, приводящее в движение ротор.
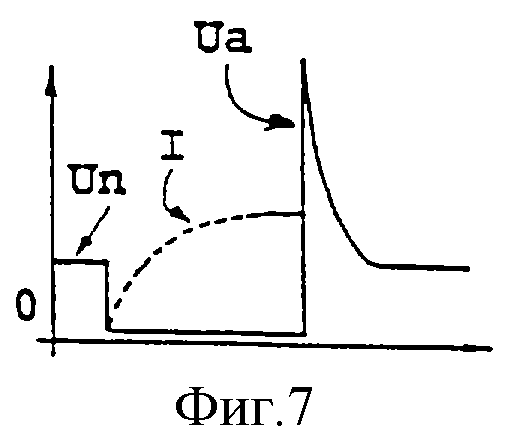
Положительное напряжение в точке соединения стока транзисторов 21X, 21Y и обмоток 112Х и 112Y ( по отношению к 0 = минус ) показано на фиг.7 сплошной линией; ток, протекающий через главные обмотки 112, имеет вследствие действия индуктивности характеристику, показанную на фиг. 7 штриховыми линиями. Таким образом, в начальной фазе ток нарастает медленно, так же эффективный магнитный поток, вызывающий вращение. При отключении обмотки в ней возникает значительное напряжение Uа, которое превосходит по величине номинальное напряжение электродвигателя Un, представляет собой потерянную энергию и может разрушить транзистор 21. Это напряжение самоиндукции Ua может быть преобразовано в полезную движущую силу, если его подвести к обмотке, которая как раз должна быть включена.
Как показано на фиг.6а, это осуществляется с помощью диодов связи 22, которые подают избыточное положительное напряжение, возникающее при отключении обмотки 112Х, на обмотку 112Y (или наоборот).
Развязывающие диоды 23 предотвращают попадание напряжения самоиндукции Ua на положительный полюс источника напряжения.
Эта схема имеет однако тот недостаток, что замыкание электроконтура напряжения самоиндукции Ua происходит через транзистор 21, соответственно, через источник напряжения.
Этот недостаток может быть устранен с помощью побочных обмоток, расположенных на тех же ярмах 11 (фиг.6b). Напряжение самоиндукции Ua возникает в главной обмотке 112Х (она является источником) и подводится к побочным обмоткам 113Y вертикальных ярм, являющимися приемниками.
Таким образом, с помощью напряжения самоиндукции Uа главной обмотки 112Х создается полезный ток в побочных обмотках 113Y, а значит и магнитный поток в ярмах, на которых они находятся.
Одновременно с возникновением тока через побочную обмотку 113Y подается также номинальное напряжение Un на главную обмотку 112Y, так как одновременно с закрытием транзистора 21X открывается транзистор 21Y. Действие быстро нарастающего переходного тока в побочной обмотке 113Y (который нарастает очень быстро) и действие более длительного, но медленно нарастающего тока через главную обмотку складываются, что приводит к быстрому нарастанию магнитного потока через вертикальные ярма, а значит и движущей силы.
В результате повторения описанных электромагнитных процессов ротор 12 приводится в непрерывное вращательное движение, так что он совершает полный оборот, когда каждая пара ярм принимает шесть управляющих импульсов.
Оптимизация момента переключения может производиться практически смещением датчика Холла 31 относительно ярм 11.
Магнитные и электрические элементы электродвигателя могут укрепляться на опорной раме 5, которая может быть изготовлена из пластмассы или подходящего немагнитного материала методом литья под давлением (фиг.1 и 8). Эта рама может быть выполнена в различном виде, однако должна иметь отверстия, в которых размещаются ярма 11 и подшипник 54 вала 52 электродвигателя.
На этой раме 5, которая служит радиатором, могут быть обычным способом укреплены мощные транзисторы 21, диоды 22 и 23, а также другие механические и электрические детали (плата, датчик Холла и т.д.) Высокое напряжение, необходимое на затворе мощных транзисторов 21, может быть получено с помощью интеграции пиков напряжения самоиндукции Uа.
Для лучшего понимания начнем с фиг.1а, представляющей собой увеличенную часть фиг.1.
Фиг. 1 и 1a рассматриваются в связи с фиг.6с, которая представляет собой улучшенное и более подробное изображение фиг.6b.
Как показано на фиг.1, когда четыре роторных полюса приблизительно совпадают с полюсами 111Y, отключаются их главные обмотки 112Y, что сразу же приводит к возникновению напряжения самоиндукции Ua, которое подается на побочные обмотки 113Х, при этом главные обмотки 112Х питаются от источника тока. Соответствующие этим обмоткам четыре полюса 111X быстро магнетизируются и могут притягивать четыре роторных полюса 121, из которых два как раз удаляются от соответствующих полюсов отключенных ярм 11Y.
Условием этого является то, что остроугольные окончания полюсов 111X находятся вблизи соответствующих окончаний полюсов 11Y, потому что иначе намагничивание полюсов 111X горизонтальных ярм не может вовремя оказать притягивающее воздействие на роторные полюса, так что ток в обмотках 112Х, 113Х будет нарастать быстро, однако без полезного действия.
Чтобы продемонстрировать важность этих фактов, на фиг.1а это расстояние между внешними углами полюсов 111X и 111Y, представленное углом u, изображено увеличенным по сравнению с фиг.1.
Это расстояние должно быть оптимировано в зависимости от электромагнитных параметров электродвигателя, и оно должно быть по меньшей мере на 3-4 мм больше, чем воздушный зазор между ярмами 11 и ротором 12, для предотвращения магнитных потерь, вызванных прямым контактом ярм 11Х и 11Y.
Скрепление ярм 11 друг с другом, а также установка электродвигателя на неподвижную основу выполняется предпочтительно в этой области между обмотками и ротором, где обнаружен малый уровень колебаний.
На фиг. 6с показана полная схема функционирующего электродвигателя, при этом точки рядом с обмотками 112 и 113 означают их начало, а 112Х изображает, например, четыре главные обмотки ярм 11Х, которые могут быть включены параллельно или последовательно.
В данном случае требуются только два связных диода 22, которые подводят напряжение самоиндукции Uа к началам побочных обмоток 113. Диоды 24 подводят пики напряжения Ua к конденсатору 25, который после запуска мотора заряжается до напряжения, которое превышает напряжение питания Uбат и которое обеспечивает питание контура управления затворных электродов транзисторов 21Y, 21X. Это напряжение ограничивается диодом 26 Зенера.
При замыкании выключателя 27 датчик Холла 31 подключается к источнику тока и на его цифровом выходе, соединенном с затворным электродом транзисторов 21Y, появляется логический сигнал "высокий" или "низкий" в зависимости от того, находится ли перед датчиком Холла северный или южный полюс многополюсной магнитной шайбы 32.
Этот логический сигнал подается также на транзистор инверсии сигналов 28, который подает на затворный электрод транзистора 21X сигнал "низкий", кода на затворном электроде транзистора 21Y находится сигнал "высокий". Стрелка над датчиком Холла 31 означает, что он подвижен относительно своей опоры, чтобы иметь возможность изменять фазу логических сигналов, возникающих при вращении многополюсной магнитной шайбы 32. Регулирование числа оборотов электродвигателя может производиться и без изменения фазы управляющих сигналов, а изменением питающего напряжения. Изменение числа оборотов может производиться также изменением сопротивления транзистора 21, т.е. регулированием напряжения на затворе. Такое регулирование имеет недостаток, так как оно вызывает потери на нагревание и нагружает транзистор, так что оно должно применяться только при небольших мощностях.
Двухступенчатое регулирование может производиться увеличением активного сопротивления электродвигателя, например, отключением половины параллельно включенных обмоток (фиг.6d).
Параллельно включенные через транзисторы 21, 21' обмотки 112, 112' управляются одновременно, если от электродвигателя требуется полная мощность. Если требуется пониженная мощность, то транзисторы 21' больше не управляются и обмотка 112' остается отключенной. Электродвигатель работает с большими потерями и с меньшей мощностью.
Предпочтительный вариант регулирования мощности в широких пределах показан принципиально на фиг.6е.
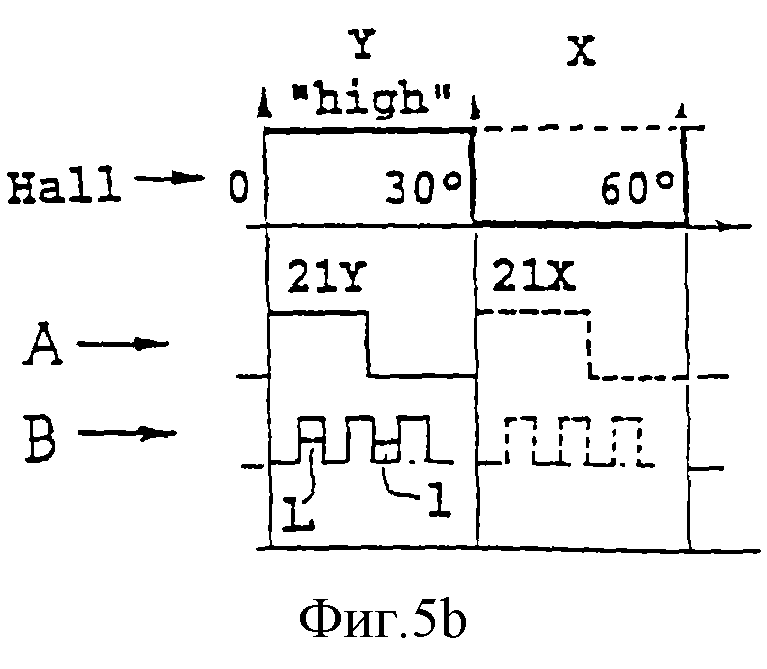
В схеме управления электродвигателя добавляются еще два полупроводниковых вентиля (здесь биполярные транзисторы), которые выполняют роль диода холостого хода, которые проводят напряжения самоиндукции, но в данном случае являются регулируемыми. На фиг.5b показаны управляющие сигналы транзисторов 21 и транзисторов 211, проводящих напряжения самоиндукции Uа.
На оси абсцисс фиг. 5b показан выходной сигнал датчика Холла, соответствующий углу поворота ротора 30o, имеющий длительность, равную длительности импульса тока, подаваемого на базу транзистора 211Y.
Продолжительность положительных импульсов напряжения, подводимых к полевому транзистору 21Y для регулирования мощности, показана на нижних осях абсцисс в двух вариантах, при этом эта длительность достигает 30o только при полной нагрузке. В первом варианте А транзисторы 21 и 211 становятся проводящими одновременно, а именно когда логический сигнал на выходе датчика Холла изменяется с "высокого" на "низкий".
При частичной нагрузке транзистор 21Y запирается прежде чем датчик Холла снова переключится на логический сигнал "низкий", т.е. прежде чем ротор повернется на 30o. Запирание транзистора 21 может вызываться, например, достижением предельного значения тока или числа оборотов (коммутационной частоты).
Если это происходит, то напряжение самоиндукции Uа не подается на побочную обмотку 113Х, так как транзистор 211Y подводит это напряжение к положительному полюсу источника напряжения.
За счет этого замедляется размагничивание ярм 11Y, которые по-прежнему притягивают роторные полюсы 121.
При достижении угла поворота ротора 30o, т.е. когда прекращается базисный ток транзистора 211Y и на выходе датчика Холла 31 появляется логический сигнал "низкий", прекращает течь остаточный ток через транзистор 211Y и напряжение самоиндукции Ua подводится к побочной обмотке 113Х. Аналогичным образом, однако, при повернутом на 30o роторе (например, при 30-60o вместо 0-30o), повторяется процесс для горизонтальных ярм 11Х, как он происходил для оси Y, т.е. транзисторы 21Х и 211Х становятся проводящими, потому что логический сигнал на выходе датчика Холла изменился с "высокого" на "низкий".
За счет этого способа регулирования достигается управление транзисторами 21Х и 21Y в зависимости от угла поворота ротора с изменяемым, максимально равным 30o углом открытия, т.е. не постоянным, равным 30o, как это имеет место в нерегулируемых электродвигателях.
За счет изменения времени открытия транзисторов 21 регулируется подвод энергии, а следовательно, мощность электродвигателя.
В показанном на фиг.5b варианте В аналогичный эффект достигается за счет многократного открывания транзисторов 21X, 21Y внутри угла поворота ротора 30o.
Это достигается модуляцией с соответствующей частотой ширины импульсов (L= импульс, 1 = пауза) управляющих сигналов транзисторов 21.
Время, в течение которого транзистор 21Y проводит ток, показано сплошной линией, а время, в течение которого проводит ток транзистор 21X, показано пунктирной линией.
Предпочтительным является интегрирование всех электронных деталей электродвигателя по возможности на одной плате.
Показанный на фиг.1 и 8 монтаж ярм 11 является важным и критичным (из-за небольшого зазора между ротором и ярмом с обмоткой). Как здесь показано, ярма 11 имеют на обеих сторонах (при необходимости на двух различных удалениях от оси) углубления или полукруглые выступы 116, которые вдвигаются в соответствующие сопряженные детали 55 (перпендикулярно к плоскости чертежа).
Эти сопряженные детали представляют собой зеркальное отражение вышеупомянутых углублений 116 и являются составной частью деталей крепления 56, расположенных на опорной пластине 57.
Таким образом, ярма закреплены радиально геометрическим замыканием, что обеспечивает равномерное удаление от ротора 12 (т.е. постоянный воздушный зазор). Крышка подшипника 58 с контропорой 54', закрепленная радиально и аксиально на раме 5, удерживает ярма 11 от перемещения в аксиальном направлении.
С этими составляющими деталями электродвигатель может работать.
Принцип действия
При подключении электродвигателя к источнику тока с напряжением Un электронная схема 2 подает управляющее напряжение на затворный электрод транзисторов 21, например, 21Y, так как на выходе датчика Холла 31 присутствует сигнал "высокий" или "низкий". Главная обмотка 112Y проходит ток и поворачивает ротор 12 из показанного на фиг.1 исходного положения на 30o в положение, в котором совпадают полюсы 111X-121. Т.е. полюса из положения относительно оси Y переходят в аналогичное положение относительно оси X. Прежде чем это положение будет достигнуто, датчик положения ротора 3 изменяет уровень логического сигнала на выходе датчика Холла 31, так что открывается транзистор 21X, тогда как 21Y запирается. Уже описанные процессы повторяются и ротор вращается постоянно и совершает полный оборот по отношению к ярмам с обмотками, после того как каждая пара их (Х и Y) получит шесть импульсов тока. Остановка, соответственно, пуск электродвигателя может достигаться тем, что затворы транзисторов 21 соединяются с отрицательным проводником без отключения электродвигателя от источника напряжения. В цифровом датчике Холла 31 изменение логического выходного сигнала происходит всегда при одинаковом относительном угле положения роторных полюсов 21 по отношению к полюсам 111 ярм 11, при этом это положение обозначается как угол 0. В интересах регулирования мощности, соответственно, числа оборотов может быть необходимым изменять этот угол, например, на +/- 5o. Это может производиться механическим изменением положения датчика Холла или влиянием на его точку включения с помощью внешнего магнитного поля, которое изменяет переменное магнитное поле многополюсной магнитной шайбы 32 (за счет сдвига фазы).
При использовании аналогового датчика Холла на его выходе образуется синусоидальный сигнал вместо прямоугольного, как показано на фиг.5. Точка переключения в этом случае может изменяться произвольно по отношению к нулю, если выбирается любая точка синусоидальной кривой в качестве уровня напряжения включения для начала коммутации.
Эта синусоидальная кривая может быть также сдвинута по фазе, как указывалось выше, так что в этом случае имеются две возможности влиять на угол коммутации. Упомянутое выше воздействие магнитным полем практически достигается с помощью обмотки или постоянного магнита, которые располагаются вблизи датчика Холла, при этом через обмотку течет ток, который остается почти неизменным. Направление вращения может изменяться путем изменения логического сигнала по фиг.5, так что транзистор 21X становится проводящим, когда логический сигнал датчика Холла является "высоким" вместо "низким", или посредством переключения на другой датчик Холла, который сдвинут по углу по отношению к первому.
Описанные здесь варианты электродвигателя без щеток могут работать погруженными в жидкость, например в топливо, если электрические части защищены, например, заливкой в искусственную смолу.
Таким образом, с помощью таких электродвигателей могут быть реализованы простые насосы без герметизации воздушного зазора, при этом весь электродвигатель находится в корпусе насоса под давлением.
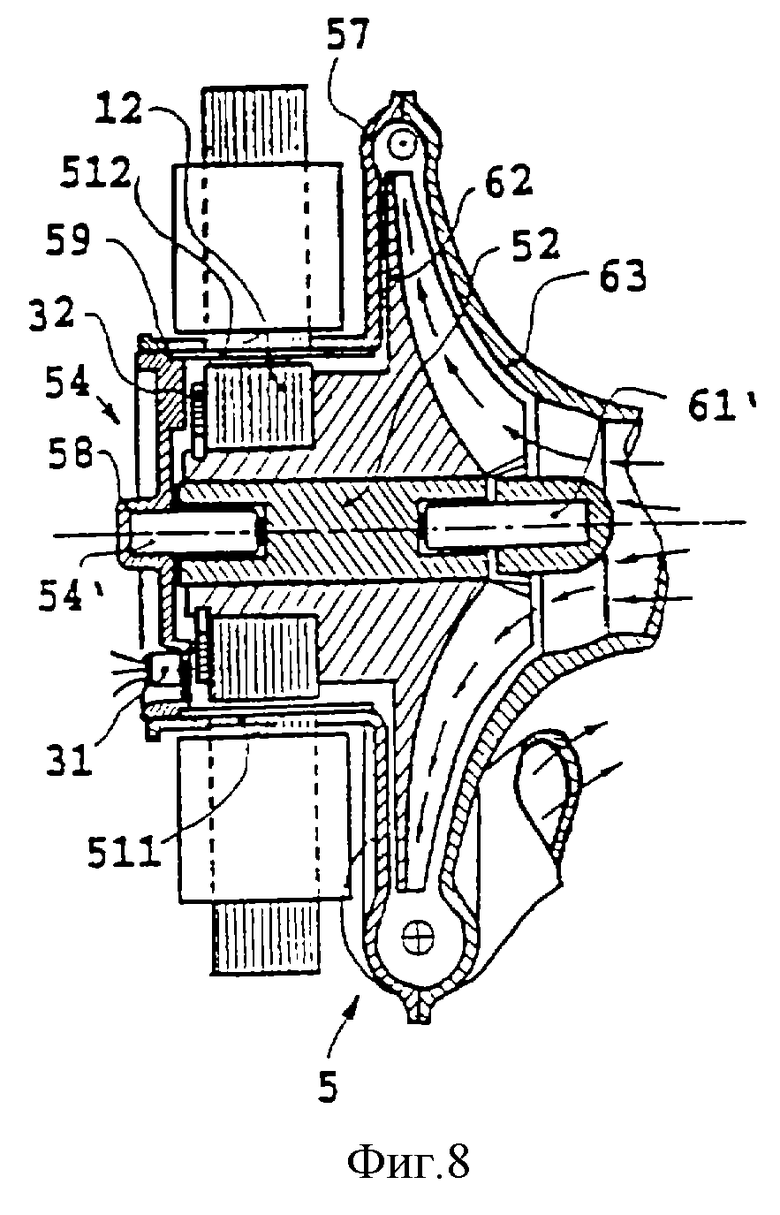
Этот тип электродвигателей особенно пригоден для привода вентиляторов и насосов, в частности тех, у которых ротор электродвигателя и ротор насоса солидарно вращаются в жидкости (фиг.8). В этом случае необходимо герметизировать роторное пространство от пространства обмоток, соответственно, от внешнего пространства.
Главная проблема при этом состоит в герметизации цилиндрического пространства воздушного зазора, так как его радиальный размер составляет десятые доли миллиметра.
В соответствии с изобретением эта проблема решается с помощью тонкой, цилиндрической оболочки 512 из немагнитного материала (из пластмассы или из нанесенного в жидком виде полимера) или из нержавеющей стали со специальными электрическими и магнитными свойствами, как например известно по трубам воздушного зазора для асинхронных электродвигателей мокрых газомеров. Эта цилиндрическая деталь не выдержала бы давления, однако она опирается на внешние полюса 111, соответственно, на сегменты из наполнительного материала 511, находящиеся между названными полюсами. Таким образом давление действует только на области цилиндрической оболочки 512, имеющие размеры не более нескольких десятых миллиметра и которые соответствуют пространствам между полюсами 111 и сегментами 511. При нагрузках на такие малые области даже тонкая пленка (0,1 мм) выдерживает давление в несколько десятков бар.
Совмещение электродвигателя с насосом в соответствии с изобретением может быть выполнено, как показано на фиг.8, следующим образом.
Ярма 11 монтируются снаружи (слева) на раме 5 (изготовленной из пластмассы или из металла) и закрепляются с помощью стопорного кольца или крышки 59.
Упомянутые выше промежуточные пространства герметизируются из цилиндрического роторного пространства, например, с помощью полимерного лака, эпоксидной смолы и т.п.
Ротор 12 с укрепленной на его левой стороне многополюсной магнитной шайбой 32 вместе с ротором насоса 62, который вводится с запиранием в ротор 12, монтируется на валу электродвигателя 52; таким образом вал электродвигателя 12 не должен передавать полезный момент электродвигателя.
Совместная конструкция закрывается крышкой насоса 63, которая центрирует также опорный палец 61'.
Здесь не поясняются детали конструкции насоса, лишь стрелками показано направление потока накачиваемой жидкости.
Датчик Холла 31 находится в (сухом) внешнем пространстве насоса и отделен тонкой, прочной и прозрачной для магнитного потока стенкой от магнитной шайбы 32, которая находится в "сыром" роторном пространстве.
Вал электродвигателя, соответственно, вал насоса изготовляется, например, из керамической трубы с отверстиями для опорных пальцев 54' и 61'.
Уменьшение шумности является главной проблемой вентиляторов и компрессоров, и иногда шум возникает вследствие колебаний момента вращения, которые от статора электродвигателя переносятся на держатель в виде вибраций.
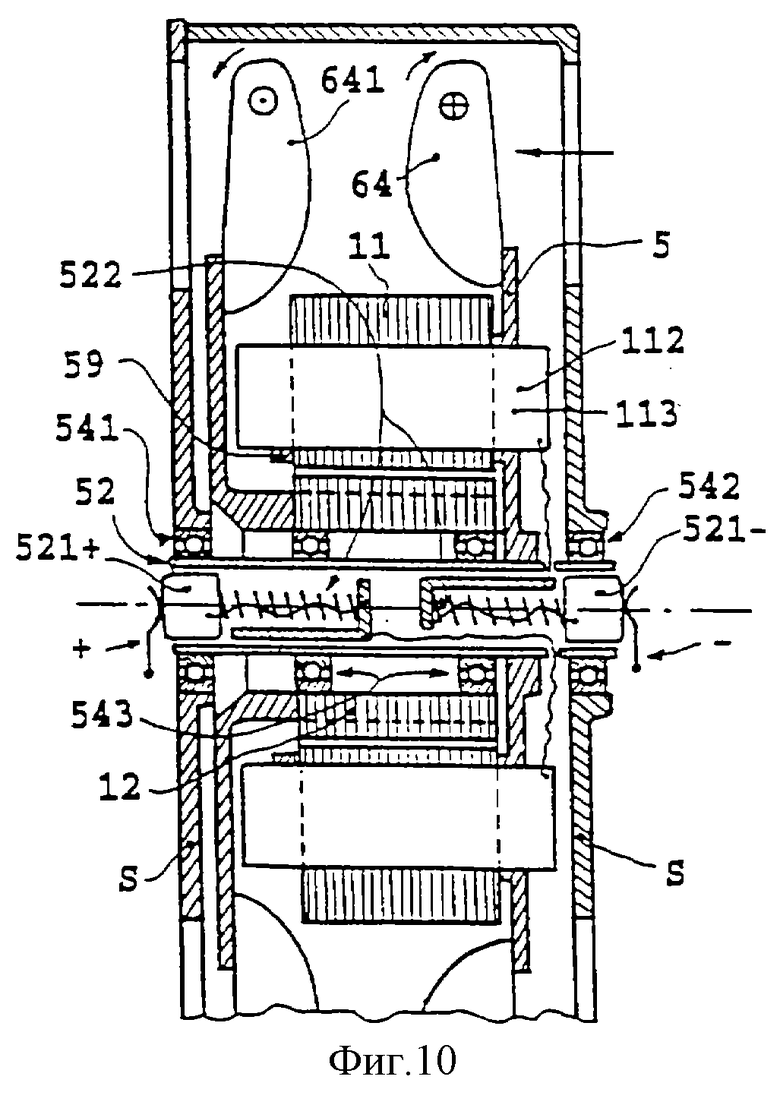
Для устранения этого недостатка возможно в соответствии с изобретением реализовать особый вариант электродвигателя компрессора, имеющего два вращающихся в разных направлениях ротора, так что электродвигатель не имеет неподвижных частей, которые бы могли передавать на держатель колебания, вызываемые моментом вращения.
Как показано на фиг.10, ярма 11 с обмотками 112, 113, вместе с соответствующими электронными деталями укреплены на держателе 5, при этом держатель соединен с валом 52, имеющим, предпочтительно, аксиальное сверление.
На этом держателе закреплены также лопасти вентилятора 64, которые подают воздух справа налево при вращении держателя вправо. На концах вала 52 предусмотрены подшипники 541, соответственно, 542. С левой стороны ярма укрепляются на держателе на этот раз не крышкой подшипника, а опорным кольцом 59, через которое проходит ротор 12.
На роторе установлены лопасти вентилятора 641, которые подают воздух справа налево при вращении ротора влево.
Ротор свободно вращается на валу 52 с помощью подшипников 543 без аксиального смещения. Внутри вала 52 в изолирующей трубе установлены две изолированные друг от друга и соединенные с клеммами электродвигателя щетки 521+ и 521-, которые пружинами 522 отжимаются наружу. Эти щетки касаются двух неподвижных ламелей +, -, которые соединены с источником тока Uбат, которые переносят это напряжение на вращающиеся щетки 521+, 521-. Подшипники 541 и 542 закреплены в держателе S.
Принцип действия
При подключении электродвигателя к источнику тока ротор 12 с вентиляторными лопастями 641 и внешняя роторная конструкция с ярмом 11, держателем 5 и лопастями 54 начинают вращаться в противоположных направлениях (ротор влево, внешняя роторная конструкция вправо) со скоростями вращения v+, v-, так что абсолютная скорость вращения между ротором и внешней роторной конструкцией составляет 2v.
Число оборотов двух вращающихся в противоположных направлениях частей будет нарастать, пока сопротивление, оказываемое воздухом на лопасти 64, 641, смонтированные на обоих роторах, не будет равно моменту вращения электродвигателя.
Такой компрессор с двумя вращающимися в противоположных направлениях роторами имеет то преимущество, что этот двухступенчатый компрессор может работать на относительно низких числах оборотов, а значит с меньшим уровнем шума.
Однако для электродвигателя расчетная скорость вращения (относительное число оборотов двух вращающихся в противоположных направлениях частей) составляет 2v.
По сравнению с обычным одноступенчатым компрессором равной мощности преимущества очевидны:
- на держатель S не переносятся реактивные моменты, а значит вызываемые ими вращательные колебания,
- расчетное число оборотов электродвигателя при одинаковой мощности вдвое больше, благодаря чему он становится меньше и легче.
На основе этого принципа можно создавать вместо аксиального компрессора компрессор с вращающимися в противоположные стороны радиальными вентиляторами, так что при этом уравновешиваются аксиальные нагрузки.
Если для таких электродвигателей необходимо регулирование мощности, то необходимо воздействовать на вращающиеся вместе с внешней роторной конструкцией 11,5 транзисторы 21.
Это возможно с помощью соответствующей, известной из уровня техники, электроники, которая получает управляющие сигналы извне без гальванического соединения, например магнитным путем с помощью передающей обмотки и приемника или оптическим путем.
Этот вид электродвигателя (соответственно, насоса) с простым принципом действия, основанного на постепенном притяжении роторных полюсов электромагнитными полюсами, может выполняться с различным количеством ярм, например шестью или восемью вместо четырех, с соответствующим увеличением числа полюсов.
Он может быть также выполнен многофазным, например с тремя фазами R, S, Т, расположенными на равных расстояниях, так что образуется электрический угол 120o вместо 180o как ранее.
Если соответственным образом согласовать роторные и электромагнитные полюса, то можно применять U-образные ярма, плечи которых расположены не тангенциально, а радиально. В таком электродвигателе можно отказаться от датчика положения ротора, однако в этом случае необходимо применять несколько более сложную программу запуска и работы по следующему принципу:
- перед запуском электродвигателя в обмотки подаются электрические сигналы, которые изменяются в зависимости от индуктивности обмоток, при этом первые зависят от положения ротора, так как оно определяет магнитное сопротивление (индуктивность) магнитных цепей соответствующих ярм,
- логическая электронная схема сравнивает эти модифицированные сигналы и определяет отсюда положение ротора, так что на выходе этой схемы появляется управляющий сигнал для транзистора 21X и 2Y,
- обмотки, включенные последовательно с проводящими транзисторами, проводят ток и приводят в движение ротор, который намагничивается под влиянием внешнего поля,
- при приближении таким образом намагниченных роторных полюсов к полюсам обесточенных ярм, они индуцируют в них напряжение, которое оценивается схемой, которая подает в эту обмотку (фазу) номинальное напряжение, так что ротор втягивается дальше.
Последние процессы повторяются, так что ротор вращается, как если бы он управлялся с помощью датчика распознавания положения ротора.
После запуска электродвигателя имеются также другие возможности автоматического управления коммутацией, как например, отклонение одной обмотки, если протекающий по ней ток превышает максимальное или заданное значение; когда достигается такое значение во время нормальной работы электродвигателя, то это означает, что роторные полюсы 121 уже притягиваются принадлежащими к этой обмотке полюсами 111.
Отключение одной обмотки (например, 112Х) приводит с помощью схемы электронной логики к включению ( при необходимости с заданной задержкой) следующей обмотки, например 112Y.
Таким образом, цепное циклическое управление парами ярм Х - Y, Y - X, соответственно, R - S - T, R - S - T, если имеются три (или несколько) фаз, может производиться с помощью датчика положения ротора или в зависимости от параметров электродвигателя (тока, индуцированного напряжения).
Это циклическое управление может быть в некоторых случаях навязано извне, при этом электродвигатель работает с заданным извне числом оборотов. В этом случае транзисторы 21X, 21Y управляются сигналами, создаваемыми генератором, находящимся вне электродвигателя.
Для такого вида управления преимущественным является применение асинхронного электродвигателя (короткозамкнутого ротора) вместо описанного по фиг.1 ротора.
При соблюдении тех же электромагнитных критериев можно выполнять этот вид электродвигателя с ярмами, находящимися внутри стаканчатого ротора.
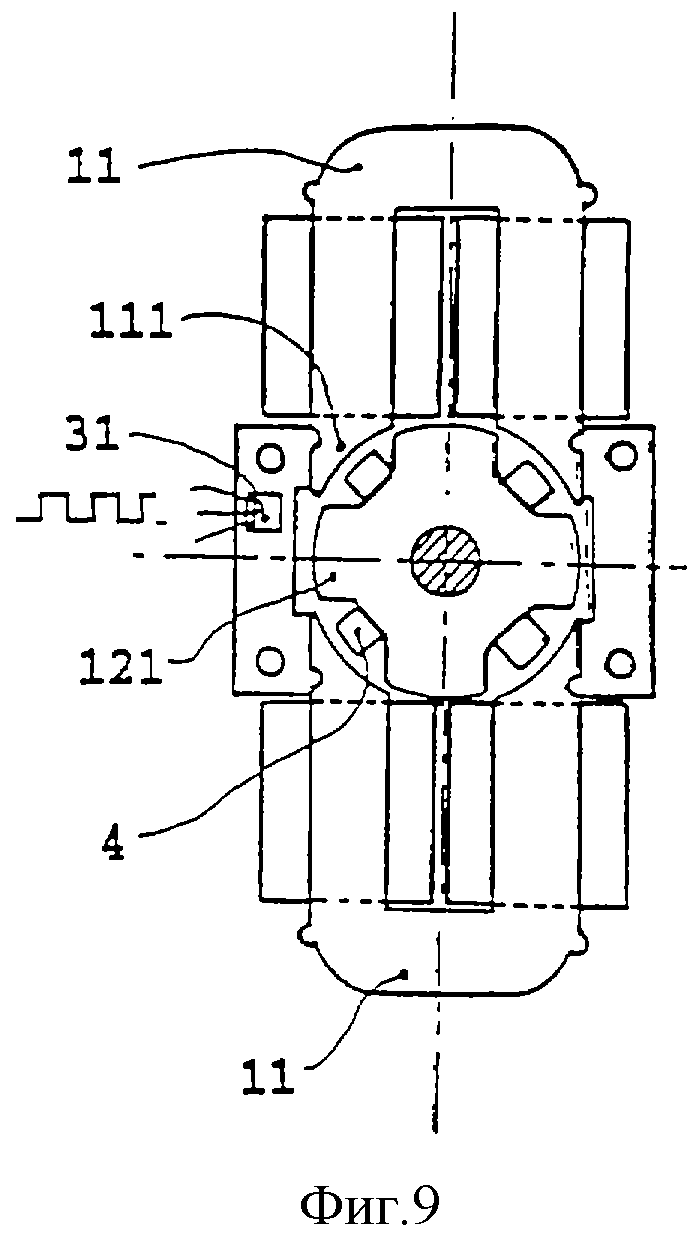
Простой вариант соответствующего идее изобретения электродвигателя показан на фиг.9. Этот электродвигатель имеет только два расположенных напротив друг друга ярма 11 с обмотками и один мощный транзистор 21, включенный последовательно с обмотками этих ярм, и только четыре роторных полюса 121.
Электрическая схема соответствует фиг. 6а, однако без элементов оси Х (без ярм 11Х, обмотки 11Х, транзистора 21Х). Диоды 22 и 23 не нужны. Ротор этого электродвигателя имеет два или четыре магнита 4 позиционирования ротора, которые поворачивают ротор в положение запуска, которое соответствует фазе пропускания тока транзистором 21, соответственно, положению ротора, в котором роторные полюса 121 не совпадают с полюсами 111 ярм 11.
Эти магниты могут для определения положения ротора управлять датчиком Холла, имеют небольшие размеры, поэтому создают силы, которые незначительны по сравнению с электромагнитными силами, действующими на ротор 12.
Так как позиционные магниты 4 притягиваются к полюсам ярм 11, то ротор занимает указанное в предыдущих абзацах положение. Транзистор 21 становится проводящим, полюса 111 ярм 11 магнетизируются и притягивают близлежащие роторные полюса 121. Когда роторные полюса 121 почти совпадают с внешними полюсами 111, один из магнитов 4 проходит мимо датчика Холла 31 и изменяет его логическое состояние, так что обмотки обесточиваются. Ротор под влиянием сил инерции продолжает движение, пока роторные полюса 121 не займут положение против полюсов ярм 11, что соответствует исходному положению. На пути к этому положению другой магнит 4 пройдет мимо датчика Холла 31 и изменит его логическое состояние, так что описанные процессы повторяются и электродвигатель вращается.
При дальнейшем упрощении можно создать электродвигатель, аналогичный показанному на фиг. 9, однако только с одним U-образным ярмом с обмотками, который имеет между продленными U-плечами круговые сегменты, которые действуют как полюсы 111, между которыми вращается ротор с только двумя полюсами, при этом ротор прерывисто, два раза за один оборот приводится в движение с углами полезного момента около 90o, что соответствует двум импульсам тока.
В частности для электродвигателей с высоким уровнем напряжения можно вместо полевых транзисторов 21 применять также другие полупроводники, такие как тиристоры (при необходимости тиристоры, запираемые по обратному переходу), биполярные транзисторы и т.д., при этом должна изменяться электронная схема управления в соответствии с известным уровнем техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХФАЗНАЯ, ЭЛЕКТРОННО-КОММУТИРУЕМАЯ РЕАКТИВНАЯ МАШИНА | 1997 |
|
RU2180766C2 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2635663C1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| ИНТЕГРАЛЬНЫЙ ГРАДИЕНТНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК | 2010 |
|
RU2453947C2 |
| Вентильный электродвигатель | 1980 |
|
SU972634A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2195066C2 |
| КОММУТАТОР ДЛЯ ДВУХФАЗНОГО БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ | 1999 |
|
RU2153760C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2007 |
|
RU2377714C2 |
Использование: в качестве привода в насосах и компрессорах для газов и жидкостей. Электродвигатель имеет магнитную цепь, которая позволяет осуществить его работу с помощью простой электроники. Электродвигатель имеет четыре U-образных ярма, которые образуют восемь неравномерно распределенных полюсов, между которыми вращается шестиполюсный ротор. Электродвигатель управляется с помощью двух мощных полупроводников и одного датчика Холла. Высвобождаемая при отключении главных обмоток энергия размагничивания передается через диоды связи на побочные обмотки следующей фазы в качестве энергии предварительной магнитизации. Технический результат заключается в упрощении конструкции, повышении скорости, уменьшении шума и стоимости. 3 с. и 34 з.п.ф-лы, 10 ил.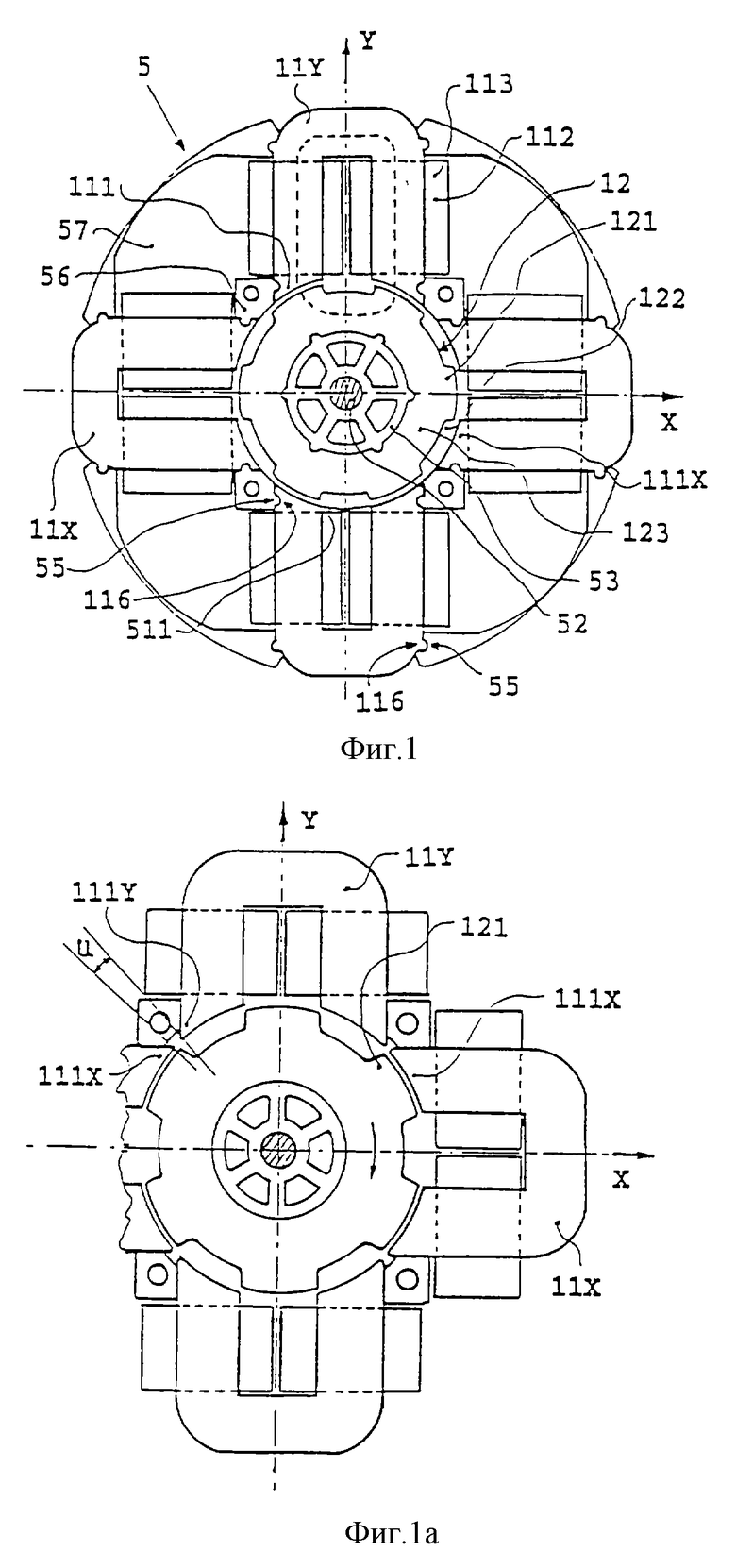
Приоритет по пунктам:
22.09.1994 по пп.1-4, 8, 9, 11, 12, 19-25, 28, 29 и 37;
25.04.1995 по пп.5-7, 10, 13-18, 26, 27, 30-36.
| Способ электрохимической обработки | 1974 |
|
SU500963A1 |
| SU 17394446 А1, 07.06.1992 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| ЕР 0422226 А1, 17.04.1991 | |||
| Гидроциклон | 1973 |
|
SU441970A1 |

