Изобретение касается улучшений технических характеристик мобильного прибора измерения градиента силы тяжести (ПИГСТ). Градиометры силы тяжести измеряют одну составляющую или более градиента силы тяжести, который выражается в виде градиента вектора силы тяжести или, другими словами, тензора, который можно записать следующим образом;
Единицами являются этвеш, или 10-9 с-2, или эквивалентные им.
Эти устройства нельзя путать с гравиметрами, которые измеряют гравитационное поле, например, посредством измерения веса известной массы в гравитационном поле.
Фирму ВНР интересует улучшение технических характеристик ПИГСТ в авиации для цели обнаружения гравитационных аномалий, вызываемых аномалиями геологических плотностей, связанными с местоположениями полезных ископаемых промышленного значения.
Измерения силы тяжести можно осуществлять с самолета и их обычно используют при некоторых изыскательных работах ресурсов, в частности при разведке на нефть. Измерение градиента силы тяжести предпочитают для обнаружения гравитационных аномалий с воздушной платформы, потому что при прямом измерении силы тяжести нельзя отличить сигнал силы тяжести от ускорений прибора, связанных с движением самолета. Это оказывается особенно важным при съемках с малых высот, предпочитаемых при изыскании минералов, с целью улучшения пространственной разрешающей способности обследования из-за преобладания атмосферных турбулентностей близко к поверхности Земли. Идеальное измерение градиента силы тяжести не будет чувствительным к движению прибора.
Основным источником шума (погрешности) измерения является остаточная чувствительность ПИГСТ к движению. Амплитуда сигнала градиента силы тяжести, ожидаемая от рентабельного месторождения полезных ископаемых, находится в диапазоне 1-100 этвеш [1 этвеш = 10-9 (м/с2/м)]. Ускорения, испытываемые при обследовании с самолета во время изыскании низких уровней, обычно составляют порядка 1-10 м/с2, а ПИГСТ имеет длину базы 0,1-0,4 м. Следовательно, устранение ускорения ПИГСТ должно быть порядка одной части на 109 частей.
В настоящее время считается, что изобретение представляет собой прибор измерения градиента силы тяжести, содержащий:
первый, второй, третий и четвертый акселерометры, разнесенные на равные расстояния по периферии круга, оси чувствительности которых проходят по касательной к кругу, и которые расположены противолежащими парами, где первый акселерометр расположен напротив второго, а третий акселерометр напротив четвертого, причем при использовании акселерометры вращаются вокруг оси, нормальной к кругу и проходящей через его центр;
суммирующий усилитель, который принимает выходные сигналы акселерометров и объединяет их таким образом, чтобы аннулировать выходные сигналы общей моды с целью создания выходного сигнала прибора, и
одну цепь обратной связи или больше, проходящие от выхода прибора к одному акселерометру или больше для компенсации погрешностей, где цепи обратной связи включают в себя одну или более следующие цепи обратной связи, взятые либо по отдельности, либо в сочетании.
Первая цепь обратной связи, чувствительная к сигналу, представляющему первую сдвинутую по фазе на 90o составляющую гравитационного ускорения, модулированную вращением прибора, идущая от выхода прибора и подающая сигнал обратной связи в средство регулирования масштабного множителя в первом акселерометре первой пары и в средство регулирования масштабного множителя в другом акселерометре с обратным знаком. Путь обратной связи может проходить через делитель, который уменьшает вдвое амплитуду сигнала по сравнению с сигналом обратной связи, требуемым при его подаче на один акселерометр, так что только половина сигнала подается обратно на два акселерометра.
Вторая цепь обратной связи, чувствительная к сигналу, представляющему вторую сдвинутую по фазе на 90o составляющую гравитационного ускорения, модулированную вращением прибора, идущая от выхода прибора и подающая сигнал обратной связи на средство регулирования масштабного множителя в первом акселерометре второй пары с обратным знаком. Путь обратной связи проходит через делитель, который делит пополам амплитуду сигнала по сравнению с требуемым сигналом, когда он подается на один акселерометр, так что только половина сигнала подается обратно на два акселерометра.
Третья цепь обратной связи, чувствительная к сигналу, представляющему вращательные ускорения относительно оси вращения, идущая от выхода и подающая сигнал обратной связи на средство регулирования масштабного множителя в обоих акселерометрах первой пары и на средство регулирования масштабного множителя в обоих акселерометрах другой пары с обратным знаком. Путь обратной связи может проходить через делитель, который делит на четыре части амплитуду сигнала по сравнению с требуемым сигналом обратной связи, когда он поступает на один акселерометр, так что только четвертая часть сигнала поступает обратно на четыре акселерометра.
В общем, изобретение заключает в себя концепцию выравнивания любого сигнала обратной связи таким образом, что он подается, после соответственного деления (если оно требуется), на два или более акселерометра с соответственным образом измененными на обратные знаками, а не подается на один акселерометр.
Теперь будет описан пример изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 представляет схематическую иллюстрацию известного прибора измерения градиента силы тяжести, имеющего четыре акселерометра;
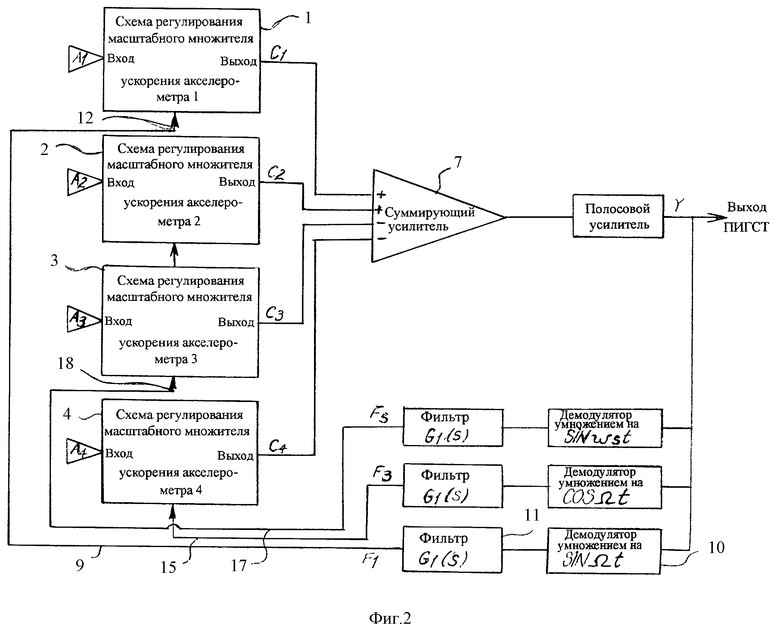
фиг. 2 представляет блок-схему обычных активных цепей обратной связи, функционирующих в показанном на фиг. 1 приборе;
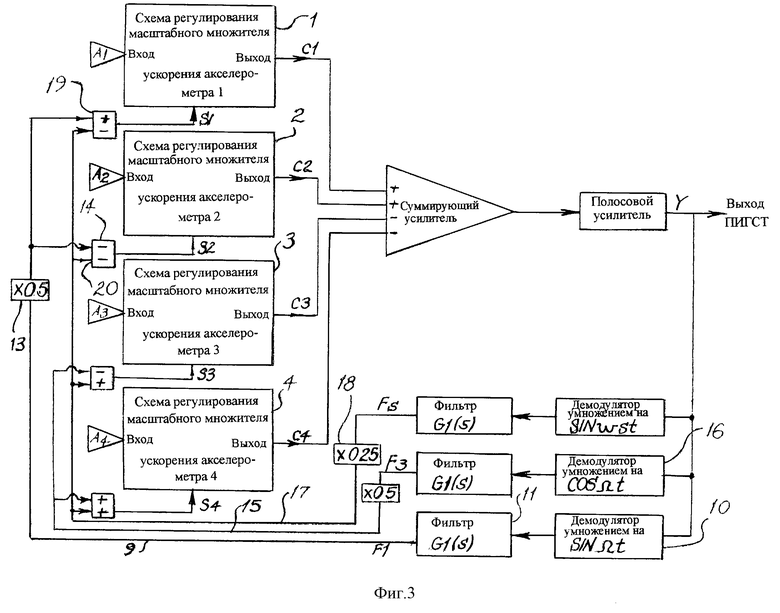
фиг. 3 представляет блок-схему активных цепей обратной связи, с использованием признаков настоящего изобретения;
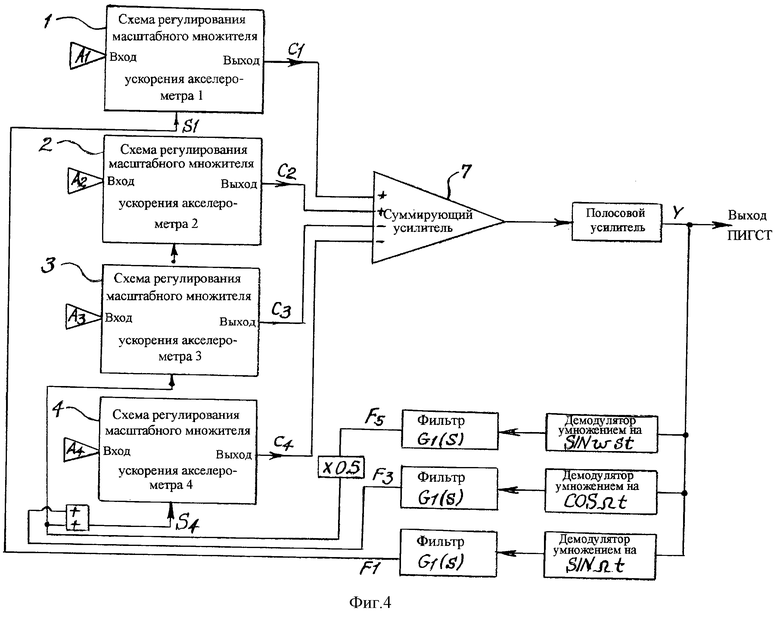
фиг. 4 представляет блок-схему активных цепей обратной связи с использованием альтернативных признаков настоящего изобретения;
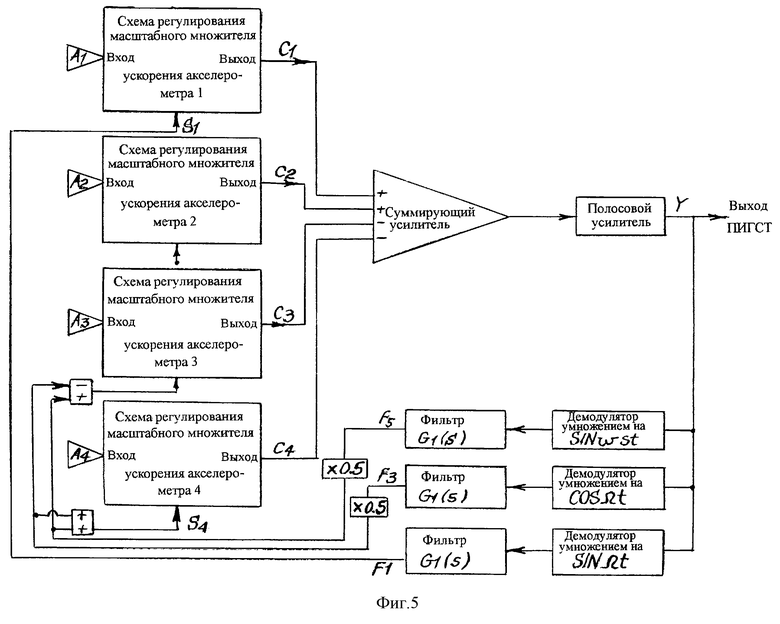
фиг. 5 представляет блок-схему активных цепей обратной связи с использованием еще одних альтернативных признаков настоящего изобретения.
Для указания соответственных признаков на всех чертежах использованы одни и те же ссылочные позиции.
Прибор измерения градиента силы тяжести (ПИГСТ) состоит из четырех 1, 2, 3 и 4 (или из восьми) высококачественных малошумящих согласованных акселерометров, смонтированных на блоке 5, как показано на фиг. 1 (для данного описания можно считать, что восьмиакселерометный ПИГСТ состоит из двух отдельных комплектов по четыре акселерометра на одном и том же блоке, причем, описание выполняется только одного комплекта из четырех акселерометров). Каждый из акселерометров ПИГСТ имеет механизмы подстройки масштабного множителя акселерометра и ориентации оси чувствительности акселерометра. Регулирование подстройки ориентации обычно происходит относительно выходной оси акселерометра.
Нормальная конфигурация акселерометров ПИГСТ имеет акселерометры 1, 2, 3 и 4, расположенные на равных расстояниях по периферии круга, оси чувствительности которых проходят по касательной к кругу, блок вращается вокруг оси 6 (оси вращения), которая нормально и с высокой точностью перпендикулярна плоскости круга и проходит через центр круга. Скорость вращения (Ω) обычно составляет 0,25 Гц и может изменяться от 0,25 до 1,67 Гц. Выходные сигналы четырех акселерометров объединяются суммирующим усилителем 7, как показано на фиг. 2. Это объединение выходных сигналов должно производиться способом, который позволяет с высокой степенью точности аннулировать выходные сигналы акселерометров с высокой общей модой, так что могут наблюдаться остаточные разности, которые составляют сигнал градиента. На фиг. 2 выходные сигналы акселерометров 3 и 4 вычитаются из выходных сигналов акселерометров 1 и 2 с целью достижения аннулирования общей моды.
В номинальной конфигурации ПИГСТ, и если чувствительность акселерометров точно одинакова, ПИГСТ оказывается чувствительным к ускорениям поступательного движения или к вращениям относительно оси вращения. ПИГСТ сохраняет чувствительность к скорости вращения относительно оси в плоскости круга (X и Y на фиг. 1), и этот источник шума (погрешности) снижается до пренебрежительно низкого уровня благодаря монтажу ПИГСТ в высококачественных универсальных шарнирах со стабилизированной инерционностью.
ПИГСТ имеет остаточную чувствительность к поступательному движению, которое является результатом разности чувствительностей каждого из диаметрально противолежащей пары акселерометров или пропорциональным ему.
ПИГСТ включает в себя активную цепь управления с обратной связи с целью непрерывного согласования чувствительностей в каждой паре, называемой обратной связью по масштабному множителю. Эти цепи управления с обратной связью требуют наличия отчетливого сигнала на выходе ПИГСТ, который является результатом несогласованности пары акселерометров. Такой сигнал появляется, когда ось вращения отклоняется от вертикали 8. Это происходит в каждом акселерометре, воспринимающем гравитационное ускорение, модулированное вращением ротора ПИГСТ. Результирующая составляющая выходного сигнала ПИГСТ равна Δ12кг sin(θv)sin(Ωt) для одной пары и Δ34кг sin(θv)sin(Ωt)) для другой пары. Активные схемы управления с обратной связью считают величину этих сигналов посредством синхронного детектирования выходного сигнала ПИГСТ и регулируют чувствительность одного из акселерометров соответствующей пары на нуль сигнала θv, представляющего угол, на который ось вращения ПИГСТ отклоняется от вертикали.
ПИГСТ имеет остаточную чувствительность к вращательным ускорениям относительно оси вращения всякий раз, когда имеется несогласованность средних чувствительностей двух пар акселерометров. ПИГСТ включает в себя также схему управления с обратной связью для регулирования этой несогласованности посредством регулирования чувствительности третьего акселерометра, называемого спиновой модуляцией или обратной связью по паре масштабных множителей. Эта цепь базируется на активной модуляции спиновой скорости ПИГСТ на другой частоте (обычно 1,8 Гц) для обеспечения сигнала обратной связи. Результирующей составляющей выходного сигнала ПИГСТ является (Σ12K-Σ34K)θsω
Активные цепи обратной связи схематически показаны на фиг. 2. Для каждой цепи выходной сигнал ПИГСТ демодулируется посредством умножения на синусоидальный сигнал с частотой возбудителя цепи и в фазе с остаточной чувствительностью к возбуждению. Демодулированный сигнал проходит через фильтр нижних частот, включающий в себя интегрирующую схему, перед подачей обратно на соответственную точку управления акселерометром.
Усовершенствование цепей компенсации
В первой цепи 9-10 обратной связи по масштабному множителю, выходной сигнал (Y) ПИГСТ вначале демодулируется посредством умножения на sin(Ωt), а затем пропускается через фильтр 11, представленный фильтром G1(s) с целью образования фильтрованного сигнала F1. Фильтр G1(s) включает в себя интегрирующую схему, так, что цепь действует до полного нулевого значения сигнала постоянного тока.
Этот процесс дает сигнал F1, соответствующий величине выходного сигнала ПИГСТ на частоте Ω, и некоторый шум, связанный с шумом в выходном сигнале ПИГСТ в окрестности частоты Ω, в ширине полосы частот фильтра G1(s). Составляющая, которая представляет собой величину синфазной составляющей выходного сигнала с частотой Ω, является сигналом, требуемым для цели обратной связи с целью регулирования масштабного множителя акселерометра 1 для корректирования рассогласования между акселерометрами 1 и 2.
Затем сигнал F1 передается на схему 12 регулирования масштабного множителя акселерометра 1. Для упрощения мы считаем, что масштабные множители акселерометра 1 и акселерометра 2 равны единице. В этом случае вклад в выходной сигнал ПИГСТ акселерометра 1 в (1+F1) раз больше воспринимаемого им ускорения.
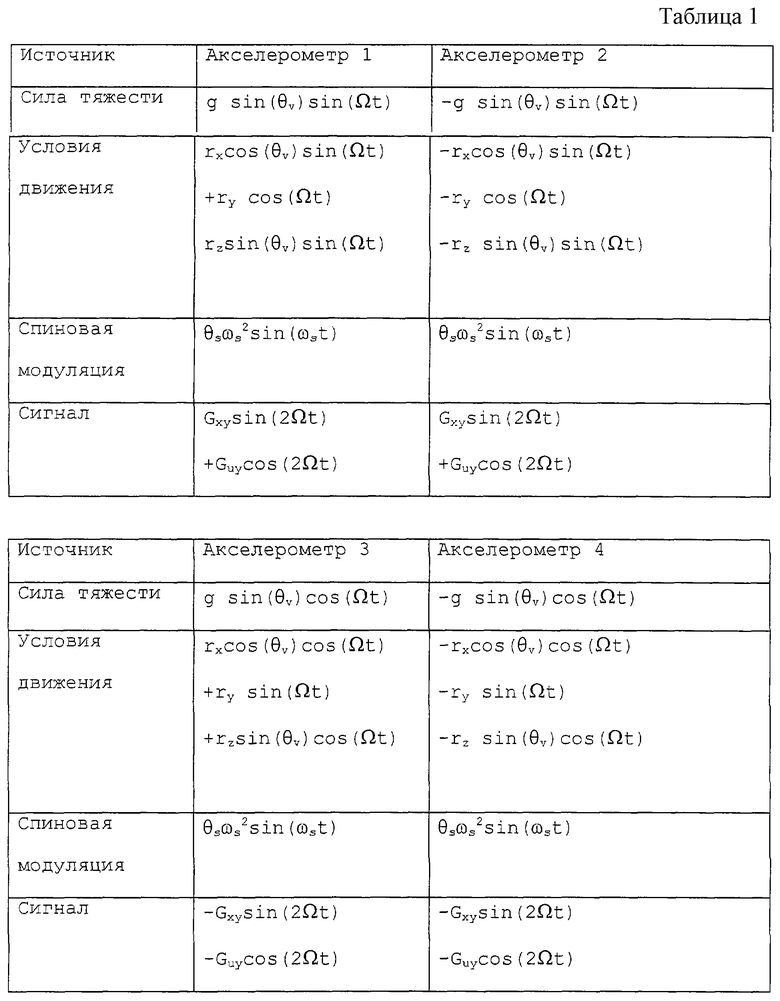
Ускорение, испытываемое акселерометром 1, составляет величину вкладов, которые возникают из условия ускорения ПИГСТ и определенных дополнительных движений, используемых в качестве сигналов для работы цепей обратной связи. Составляющими, которые необходимо различать, являются: гравитационное ускорение (g), ускорения движения окружающей среды (r = [rхryrz]), модуляция скорости вращения, применяемая для работы цепи обратной связи по спиновой модуляции (θs).
Ускорения, испытываемые акселерометрами ПИГСТ от этих источников, показаны в табл. 1. Включен также вклад от сигнала градиента силы тяжести (отметим, что эта составляющая включает также сигналы от скорости вращения ротора ПИГСТ).
Знаки этих составляющих имеют важное значение и определяют аннулирование слагаемых в выходном сигнале ПИГСТ. Отметим, что предпочтительными частотами для этих модуляций являются частоты вблизи F для вращения ПИГСТ и вблизи 1,8 Гц для спиновой модуляции.
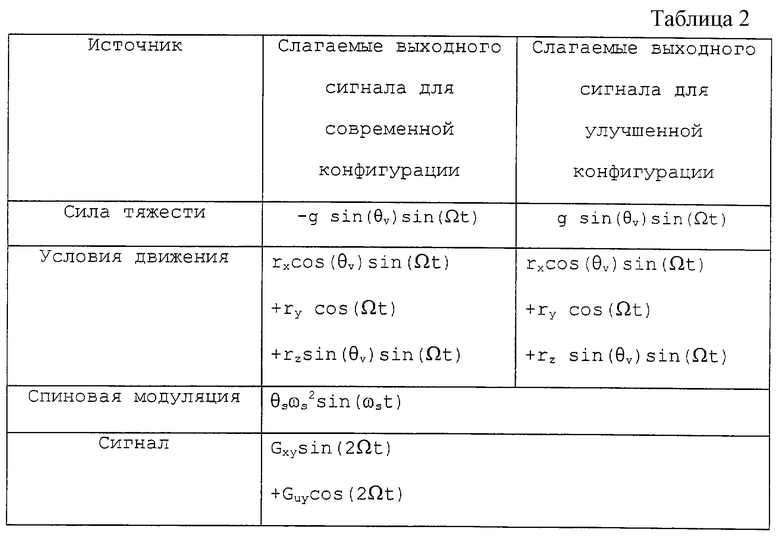
В настоящей конфигурации вкладом в выходной сигнал ПИГСТ от первой цепи 9 масштабного множителя является ускорение, испытываемое акселерометром 1, умноженное на масштабный множитель акселерометра 1, который мы принимаем равным 1+F1. Отметим, что в уравновешенном состоянии добавление выходных сигналов акселерометров 1 и 2 при отсутствии какого-либо сигнала обратной связи (F1=0) аннулирует те сигналы, которые имеют противоположные знаки для двух акселерометров. Это оставляет слагаемые только спиновой модуляции и сигнала, и при вычитании вклада акселерометров 3 и 4, как это происходит в выходном сигнале ПИГСТ, слагаемое спиновой модуляции также аннулируется. С другой стороны, сигнал обратной связи, который полностью состоит из шума, когда акселерометры находятся в уравновешенном состоянии, вносит вклад непосредственно в выходной сигнал ПИГСТ на частотах, определяемых содержанием частот ускорения, испытываемого только акселерометром 1. В частности, вносится вклад в шум на частоте вблизи Ω из-за составляющей силы тяжести, вблизи ωs из-за составляющей спиновой модуляции и гораздо выше частотного распределения ускорений движения, дополнительно увеличиваемого вращением ПИГСТ.
Выходной сигнал F1 первой цепи масштабного множителя используется для регулирования масштабных множителей акселерометров 1 и 2 в противоположных направлениях. Для такой же характеристики обратной связи, сигнал, подаваемый на каждый акселерометр с пересчетного устройства 13, составляет половину по сравнению с сигналом, подаваемым на один акселерометр 1 в настоящей конфигурации. Кроме того, сигнал S2, поступающий на акселерометр 2, инвертируется инвертором 14. Вклад от этой цепи обратной связи в выходной сигнал ПИГСТ в этом случае в (1+F1)/2 раз больше ускорения, испытываемого акселерометром 1, и в (l-F1)/2 раз больше ускорения, испытываемого акселерометром 2. Это оказывает благотворное влияние на аннулирование действия тех составляющих ускорения, которые имеют одинаковый знак в акселерометрах 1 и 2. В частности, аннулируется составляющая спиновой модуляции.
Функция цепи выравнивания в отношении коррекции разбаланса масштабных множителей акселерометров 1 и 2 не выполняется улучшенной конфигурацией, поскольку возбуждающий сигнал для этого действия (четко показанный в табл. 2) не видоизменяется вследствие изменения конфигурации.
В итоге, усовершенствование этой цепи снижает шум в выходном сигнале ПИГСТ вблизи частоты спиновой модуляции.
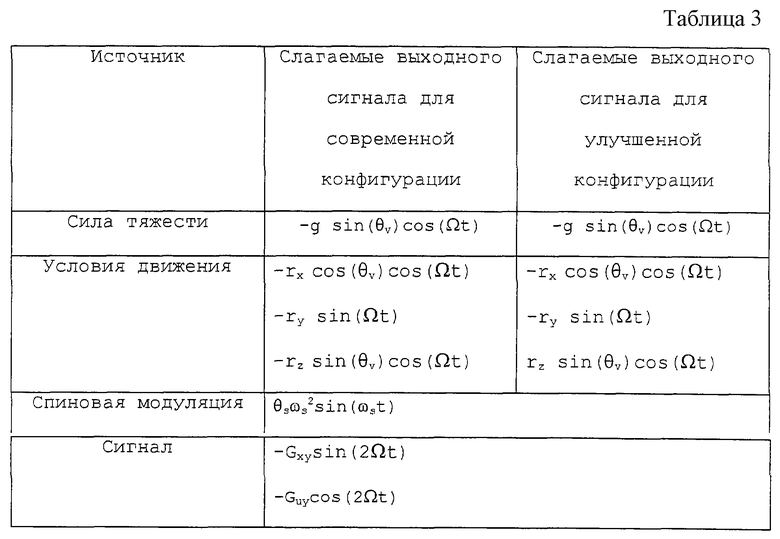
Вторая цепь 15 масштабного множителя функционирует таким же образом, как и первая цепь масштабного множителя, но со сдвигом на 90o относительно нее, так что она чувствительна к разбалансу масштабного множителя акселерометров 3 и 4. Это получается демодуляцией посредством величины cos(Ωt) 16, а не величины sin(Ωt). Результаты наблюдений, приведенные для усовершенствования, происходящего из-за улучшенной конфигурации первой цепи 9 масштабного множителя, также подаются во вторую цепь 15 масштабного множителя.
Функция цепи выравнивания в отношении коррекции разбаланса масштабных множителей акселерометров 3 и 4 не выполняется улучшенной конфигурацией, поскольку возбуждающий сигнал для этого действия (четко показанный в табл. 3) не видоизменяется вследствие изменения конфигурации.
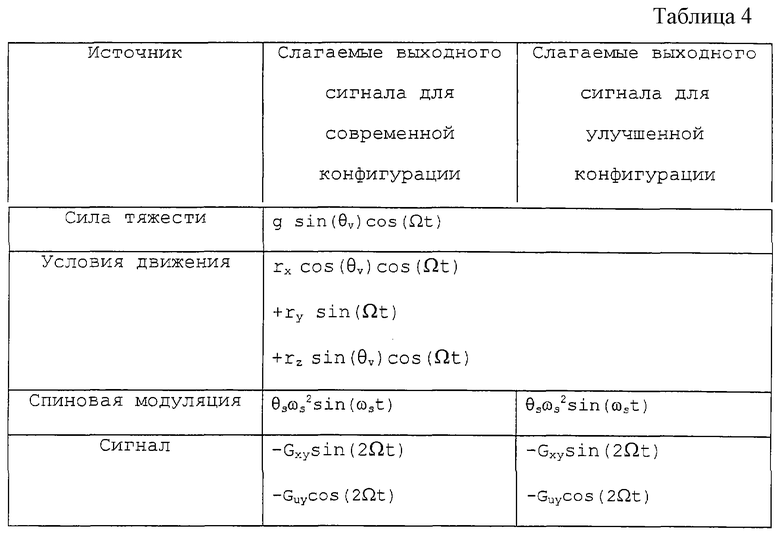
Возвращаясь к фиг. 2, отметим, что в цепи 17 спиновой модуляции сигнал Fs обратной связи регулирует масштабный множитель акселерометра 3, и это ведет к внесению вклада в выходной сигнал ПИГСТ, который представляет собой ускорение, испытываемое акселерометром 3, модулированное величиной Fs. В улучшенной конфигурации, показанной на фиг. 3, четвертая часть сигнала Fs обратной связи используется для регулирования масштабных множителей всех четырех акселерометров с противоположной полярностью для пары 1 и 2 относительно пары 3 и 4, определяемой посредством пересчетной схемы 18 и инверторов 19 и 20. Действие такой схемы состоит в том, чтобы аннулировать те слагаемые ускорения, которые имеют противоположный знак для двух акселерометров пары. Получающиеся сигналы показаны в табл. 4.
Функция цепи выравнивания в отношении коррекции разбаланса масштабных множителей между парами акселерометров не выполняется улучшенной конфигурацией, поскольку возбуждающий сигнал для этого действия (четко показанный в табл. 4) не видоизменяется вследствие изменения конфигурации.
Действие усовершенствования состоит в том, чтобы исключить вклады в выходной сигнал ПИГСТ от всех источников: вблизи спиновой частоты Ω и более широко в диапазоне частот условий движения ПИГСТ. Функционирование цепи спиновой модуляции при передаче шума с частотой от примерно частоты спиновой модуляции до полосы частот (0,1-0,9 Гц) сигнала посредством ее взаимодействия с ускорениями движения, наносит серьезный вред техническим характеристикам ПИГСТ и устраняется усовершенствованной конфигурацией.
В показанной на фиг. 2 конфигурации цепи масштабных множителей вносят вклад в выходной сигнал ПИГСТ в области частоты спиновой модуляции, но который выводится из выходного сигнала ПИГСТ в области частоты вращения ПИГСТ. Кроме того, цепь спиновой модуляции вносит вклад в выходной сигнал ПИГСТ вблизи частоты вращения ПИГСТ, но он появляется из выходного сигнала ПИГСТ вблизи частоты спиновой модуляции. Эти действия служат для усиления или увеличения содержания шумов в обоих этих диапазонах частот посредством передачи шумов между двумя полосами частот. Это действие окажется более серьезным вблизи частоты вращения, потому что оно происходит в диапазоне частот сигнала.
В результате модификации цепей обратной связи, описанной выше со ссылкой на фиг. 3, эти проблемы улучшаются. Дополнительная польза усовершенствованной конфигурации фиг. 3 происходит от развязывания действий цепей обратной связи. Стабилизация систем с большим количеством цепей обратной связи значительно облегчается, если цепи не имеют сильного взаимодействия. Это взаимодействие появляется потому, что действие обратной связи цепей масштабных множителей, влияющее только на один акселерометр пары, изменяет средний масштабный множитель пары акселерометров. Это создает разбаланс масштабных множителей между парами и требует действия цепи спиновой модуляции с целью коррекции разности, вносимой между масштабными множителями пар акселерометров.
Более серьезное взаимодействие происходит между второй цепью масштабного множителя и цепью спиновой модуляции, поскольку действие цепи спиновой модуляции состоит в регулировании масштабного множителя акселерометра 3, индуцируя тем самым разбаланс между парой акселерометров 3 и 4 и требуя для коррекции действия второй цепи масштабного множителя. Таким образом, вторая цепь масштабного множителя и цепи спиновой модуляции имеют кольцевую связь.
В улучшенной конфигурации на фиг. 3 устранена связь цепей обратной связи посредством уравновешивания их выходных сигналов таким образом, что выходной сигнал каждой цепи не оказывает действия на состояние равновесия масштабных множителей, которые воспринимает любая другая цепь.
Цепи обратной связи ПИГСТ выполняют сочетанием аналогового и цифрового преобразования для регулирования масштабных множителей акселерометров посредством подачи тока через катушку с целью дополнения магнитного поля, которое определяет чувствительность акселерометра. Предпочтительный вариант осуществления усовершенствования состоит в расчете измененных установок масштабных множителей в цифровом виде перед преобразованием в аналоговый ток для проведения регулирования.
Альтернативный вариант осуществления части представляет собой возможность, которая получает большую часть пользы от улучшенной конфигурации. Эта конфигурация показана на фиг. 4 и выполняет только частичное уравновешивание выходного сигнала цепи обратной связи по спиновой модуляции.
Еще один альтернативный вариант осуществления части состоит в возможности, которая получает большую часть пользы от улучшенной конфигурации. Эта конфигурация показана на фиг. 5 и осуществляет частичное уравновешивание выходного сигнала цепи обратной связи по спиновой модуляции и уравновешивание второй цепи регулирования масштабного множителя.
В ПИГСТ имеются три активных цепи обратной связи и возможность уравновешивания любой из цепей или любой комбинации цепей. Наибольшая польза, увеличенная вследствие уравновешивания цепей, описана в вышеприведенных альтернативных вариантах.
Альтернативный вариант осуществления состоит в том, чтобы выполнять демодуляцию, фильтрацию и комбинацию сигналов обратной связи в виде аналоговых сигналов. Это не имеет предпочтения, потому что фильтры G1(s) и G2(s) требуют интегрирующую схему, которую гораздо легче реализовать в цифровой форме. Любой из вышеприведенных цифровых вариантов осуществления можно конфигурировать в виде аналоговых эквивалентов.
Хотя изобретение описано со ссылкой на конкретные варианты осуществления, следует понимать, что его можно реализовать еще в других формах, например, другой компенсации, так что выравнивания осей чувствительности, и даже порядок компенсации также используют цепи коррекции, и эти цепи можно также уравновешивать таким же способом, как и уравновешивание цепи коррекции масштабных множителей в описании лучших порядков.
Специалисты в данной области техники поймут, что можно осуществлять различные варианты и видоизменения изобретения, показанного в конкретных вариантах осуществления, не выходя при этом за рамки сущности и объема обширно описанного изобретения. Следовательно, настоящие варианты осуществления во всех аспектах следует считать в качестве иллюстративных, а не ограничивающих.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ СКВАЖИНЫ С ПОМОЩЬЮ СРЕДСТВА РАСПРЕДЕЛЕННОГО ИЗМЕРЕНИЯ | 2010 |
|
RU2568652C2 |
| Способ получения электропроводных огнеупорных изделий | 1973 |
|
SU480215A3 |
| ОТСЛЕЖИВАНИЕ ОБЪЕКТОВ В ТРУБОПРОВОДАХ | 2009 |
|
RU2515126C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
| МОНИТОРИНГ СКВАЖИНЫ | 2010 |
|
RU2693087C2 |
| МОНИТОРИНГ КАНАЛА | 2009 |
|
RU2511228C2 |
| Устройство для определения коэффициента средней длины волны | 1976 |
|
SU657769A3 |
| ФАЗОВОЕ СЧИТЫВАНИЕ | 2010 |
|
RU2556748C2 |
| ГРАДИЕНТОМЕТР СИЛЫ ТЯЖЕСТИ | 1991 |
|
RU2043644C1 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
Использование: для измерения градиента силы тяжести на подвижном основании. Сущность: прибор содержит первый - четвертый акселерометры (1, 2, 3, 4), расположенные на равных расстояниях по периферии круга, оси чувствительности которых проходят по касательной к кругу, и которые расположены противолежащими парами с первым акселерометром напротив второго и третьим акселерометром напротив четвертого. При использовании акселерометры вращаются вокруг оси (6), нормальной к кругу, которая проходит через его центр. Суммирующий усилитель принимает выходные сигналы акселерометров и объединяет их таким способом, чтобы аннулировать выходные сигналы общей моды и создать таким образом выходной сигнал прибора. Одна или более цепей обратной связи проходят от выхода прибора к одному или более акселерометрам для коррекции погрешностей. Изобретение заключает в себе концепцию уравновешивания любого сигнала обратной связи, так что он подается после соответственного деления (если это требуется) не на один акселерометр, а на два или более акселерометров с соответственными измененными на противоположные знаками. Технический результат - улучшение пространственной разрешающей способности. 4 с. и 6 з.п. ф-лы, 5 ил., 4 табл.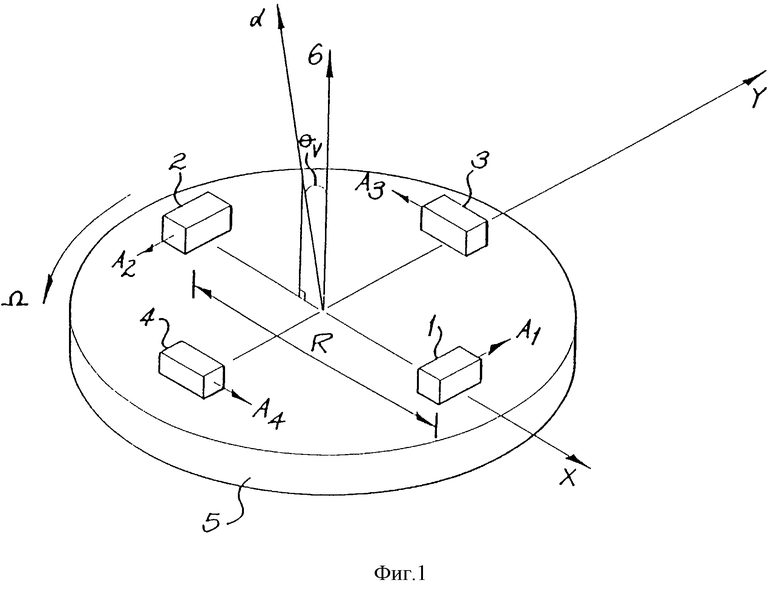
| Вертикальный градиентометр | 1973 |
|
SU651285A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 5357802 А, 25.10.1994 | |||
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |
| US 4245510 А, 20.01.1981. | |||

