1
Вертикальный градиентометр приме- няется в инерциальной навигации и гравиметрии.
Известно устройство для измерения вертикальной составляющей градиента силы тяжести, содержащее закрепленное на торсионе коромысло с массами на концах fl .
Практически оказывается очень трудно с высокой точностью совместить центр тяжести системы с осыо вращения поэтому устройство реагирует не только на вертикальную составляющую граднента силы тяжести Л , но и на силу тяжести . Никакой методикой измерения и конструкций весов разделить влияние Л и gf не удается. Кроме того, центр тяжести смещается из-за колебаний температуры, внешних вибраций, электростатических сил, конвекциoHiibix потоков и других внешних условий.
Указанные недостатки не позволяют .-использовать рассмотренное устройство
для измерений А с высокой точностью.
Цель предлагаемого изобретения - повышение точности измерений.
Это достигается за счет того, что
в вертикальный градиентометр введены второе коромысло и двигатель с горизонтально расположенным валом, на котором закреплены оба коромысла, на концах каждого из коромысел закреплена пара акселерометров, при этом ось чувствительности одного акселерометра направлена вдоль оси коромысла, а другого перепендикулярно .этой оси,при- чем выходы каждой пары акселеромет-
ров с одинаково направленными осями чувствительности, но принадлежащих раз ным коромыслам, подключены на входы сравнивающих устройств,, выходьГ которых подключены к сумматорам.
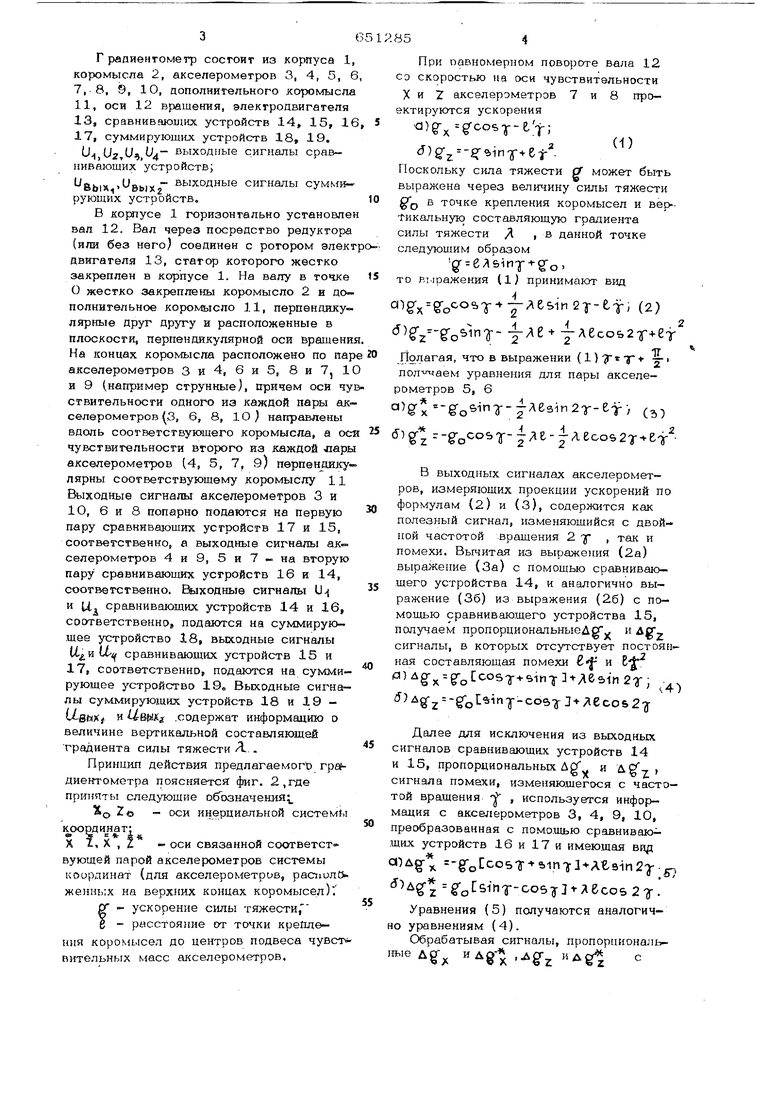
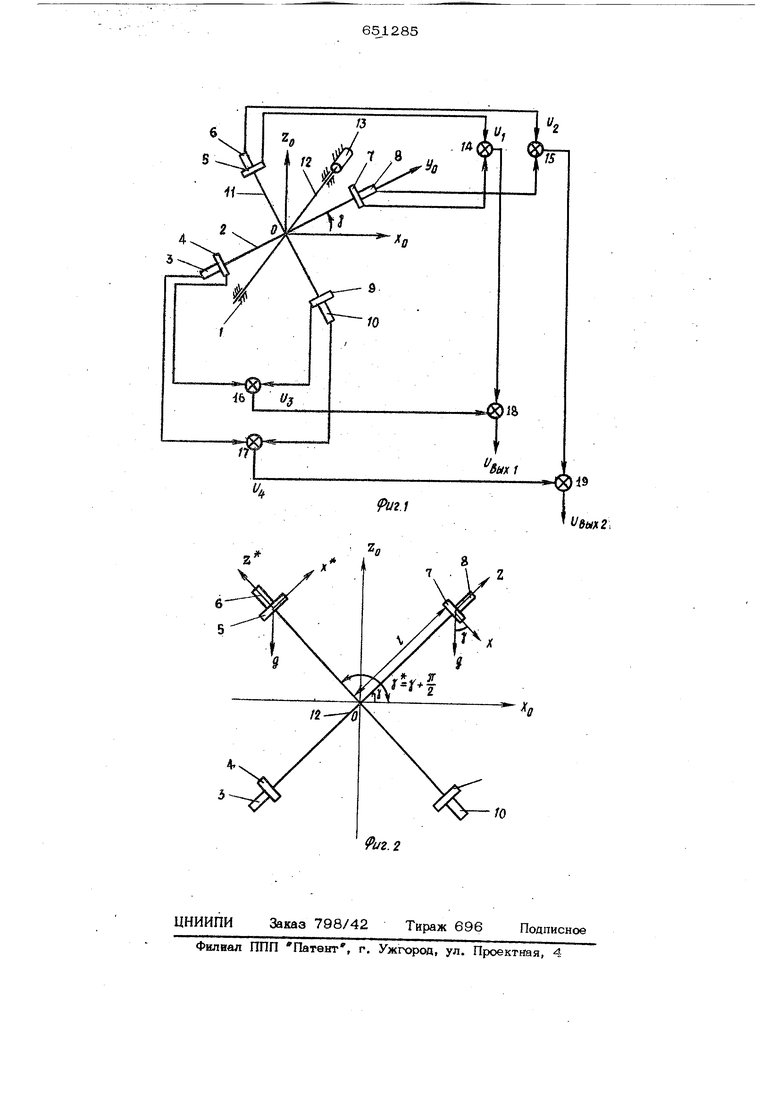
На фиг. 1 изображен предлагаемый
градиентометр; на фиг. 2 - график, поясняющий принцип действия предлагаемого градиентометра. Г радиеитометр состоит из корпуса 1, коромысла 2, акселерометров 3, 4, 5, 6 7, 8, 9, 10, дополнительного коромысла 11, оси 12 вращения, электродвигателя 13, сравнивающих устрайств 14, 15, 16 17, суммирующих устройств 18, 19. и 1/2,и (Jj- выходные сигналы сравнивающих устройств; -бы -вых Ь1ходные сигналы сумми рующих устройств. В корпусе 1 горизонтально установле вал 12. Вал через посредство редуктора (или без него) соединен с ротором Элект двигателя 13, статор которого жестко закреплен в корпусе 1. На валу в точке О жестко закреплены коромысло 2 и до полнительное коромысло 11, перпендикулярные друг другу и расположенные в плоскости, перпендикулярной оси вращени На концах коромысла расположено по пар акселерометров 3 и 4, 6 и 5, 8 и 7 1 и 9 (например струнные), причем оси чу ствительности одного из каждой пары акселерометров (3, 6, 8, 1О) направлены вдоль соответствующего коромысла, а ос чувствительности второго из каждой лары акселеромегров (4, 5, 7, э) nepneHjMUcyлярны соответствующему коромыслу 11 Выходные сигналы акселерометров 3 и 1О, 6 и 8 попарно подаются на первую пару сравнивающих устройств 17 и 15, соответственно, а выходные сигналы ак- селеромегров 4 и 9, 5 и 7 - на вторую парУ сравнивающих устройств 16 и 14, соответственно. Выходные сигналы U и Ui сравнивающих устройств 14 и 16, соответственно, подаются на суммирую- шее устройство 18, выходные сигналы It сравнивающих устройств 15 и 17, соответственно, подаются на суммирующее устройство 19, Выходные сигналы суммирующих устройств 18 и 19 и .содержат информацию о величине вертикальной составляющей градиента силы тяжести Л.. Принцип действия предлагавмогЬ rpafдиенпометра поясняется фиг. 2,где приняты следующие обозначения; XQ Z© - сх;и инерциельной систем, координат; 0tff ж X Z, X , Z - оси связанной соответст вующей парой акселерометров системы координат (для акселерометров, распилижениых на верхних концах коромысел). -ускорение силы тяжести, -расстояние от точки крейле- кия коромысел до центров подвеса чувст вительных масс акселерометров. При павномерпом повороте вала 12 со скоростью на оси чувствительности X и 2 акселерометров 7 и 8 проектируются ускорения d)er g cos-j -e,t; (1) d)g-2,-- uinj-+etПоскольку сила тяжести Of может быть выражена через величину силы тяжести в точке крепления коромысел и вер-Гикальную составляющую градиента силы тяжести Д , в данной точке следующим образом gr eAsinj -g-o, то Выражения (1) принимают вид (2) , Полагая, что в выражении т уравнения для пары акселерометров 5, 6 9x gfo T-J 3 2r-ef (5) есоб2т Ьт В выходных сигналах акселерометров, измеряющих проекции ускорений по формулам (2) и (З), содержится как полезный сигнал, изменяющийся с двойной частотой вращения 2 -у , так и помехи. Вычитая из выражения (2а) выражение (За) с помощью сравнивающего устройства 14, и аналогично выражение (36) из выражения (26) с по- мо.щью сравнивающего устройства 15, получаем пpoпopциoнaльныeДg J. и Agy сигналы, в которых отсутствует постоянная составляющая помехи ё- и Е §Гх ео ° т- 1 т -Д 21п2г, . еГ2 о Т-сов-ггЗ- лесоб2 Далее для исключения из выходньпс сигналов сравнивающих устройств 14 и 15, пропорциональных Ag и сигнала помехи, изменяющегося с частотой вращения - , используется информадия с акселерометров 3, 4, 9, 10, преобразованная с помо.щью сравниваю .ЩИ.Х устройств 16 и 17 и имеющая ви -gotc;o T ыn7J Aгвin27 5, Д§г о 111Т-с о57Д десоб2(г Уравнения (5) получаются аналогичо уравнениям (4). Обрабатывая сигналы, пропорциональД§Гл gx- efz
помощью суммирующих устройств 18 и 19, соответственно, получаем на выходе устройства сигналы
вых,2Ае51п2г;
(6)
BbiX2 2 tcos2T.
Таким образом, обеспечивается возможность . отстройки полезного сигнала от помех и связанных с неидентичностыо приборов и различием Б разных коромысел. Кроме того, практически не влияют помехи, связанные с медленными процессами (влияние температуры, релаксации материала струп и др.).
Предлагаемый градиентометр позволят достигнуть высокой точности измере- НИИ вертикальной составляющей градиена силы тяжести Л , Например, при рименении струнных Акселерометров с крутизной К 0 ЗОО (выходной сигнал акселерометра - 50 Гц при действии ускорения 1 о ) для измерения точностью Д Л lj3TB.ejJJ 10 У, выбрав период модуляции Т iOO сек, необходимо измерить наопленный за период Т электрический угол, равный
М-Тд к дЛ-3- 0 padX.O..M.u Такой угол может быть измерен, например, при работе датчика угла в режиме покачивания.
Предлагаемый градиентометр нечувствителен к ускорениям при принудительном павопачива1П1и оси вращения со скопостыо j- , о также к нереносным уссорениям, возникающим при дв 1жении основания, на котором устройство установлено (это следует из анализа урап-
нений, описывающих движение прибора). Это позволяет создать вертикаль, не- возмущаемую ускорениями, для чего не- обходикю в прибор ввести дополнител1 но систему регулирования, следящую
за минимумом вертикальной составляюшей градиента силы тяжести. Такая невоэ- мущаемая вертикаль является чрезвычайно необходимой в автономной навигации, поскольку такой прибор не имеет накапливающейся погрешности и обладает больщой помехоустойчивостью к внещНим воздействиям. Формула изобретения
Вертикальный градиентометр, содержащий закрепленное на торсионе кор{ мысло, отличающийся тем, что, с целью повыщения точности измерений, в него дополнительно введены
второе коромысло и двигатель с горизонтально расположенным валом, на котором закреплены оба короклюла, на концах К61ЖДОГО из коромысел закреплена пара акселерометроБ при этом ось чувствительности одного акселерометра направлена вдоль оси коромысла, а другого перпендикулярно этой оси, причем выходы каждой пары акселерометров с оди 1аково направленными осями чувст-
вительности но принадлежащих разным коромыслам, подключены на входы сравнивающих устройств, выходьЕ которых подключены к сумматорам.
Источники информации, принятые во внимание при экспертизе
1. Веселов К. Е., Сагитов М. У. Гравиметр1гческая разведка, М., Недра 1968, с. 212.
Фтп

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |
| Прецизионный вертикальный градиентометр | 1989 |
|
SU1836645A3 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| ИЗМЕРИТЕЛЬНЫЙ БЛОК ДЛЯ ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 2017 |
|
RU2668954C1 |
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО ГРАДИЕНТА И УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 1990 |
|
RU2037163C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВТОРИЧНОЙ ДОБЫЧИ УГЛЕВОДОРОДОВ | 1999 |
|
RU2203397C2 |
| ГРАДИЕНТОМЕТР | 2019 |
|
RU2724461C1 |
л
и,
Suxl
19
/в«х2;
/о
//г.г
