Изобретение относится к маловысотной радиолокации и может быть использовано для обнаружения зависших и летящих с малой скоростью целей на фоне сигналов местных предметов и пассивных помех.
В настоящее время известны способы для обнаружения воздушных целей с помощью маловысотной радиолокации на фоне пассивных помех, включая и отражения от местных предметов. Одним из распространенных способов борьбы с помехами данного типа является использование эффекта Доплера.
В [1] описан способ обнаружения воздушных целей на фоне отражений от местных предметов. В качестве признака, определяющего различие между сигналом от летящей цели и сигналом от местных предметов (помехи), используется различие частот отраженных от них сигналов на величину частоты Доплера. Однако данному способу присущи следующие недостатки.
1. При определенных скоростях, называемых "слепыми", обнаружение целей становится невозможным. Хотя существуют способы преодоления этого недостатка, например, путем перестройки несущей частоты РЛС, но усложнение аппаратуры РЛС и недостаточная эффективность способов оказывают сдерживающий фактор для его широкого применения.
2. При скоростях воздушных целей, имеющих значение ниже порогового, выделить сигнал от цели на фоне отражений от местных предметов не представляется возможным, а при скоростях, равных нулю, принципиально невозможно получить информативный сигнал о наличии цели. Вместе с тем существует определенный вид воздушных целей, например вертолеты, имеющих низкую скорость полета или скорость, равную нулю. Кроме летящих и зависших вертолетов сюда можно отнести и некоторые типы самолетов, летающие суда на воздушной подушке, зависшие на парашютах ракеты и т.д.
В силу этих недостатков способ, описанный в [1], не может быть применен для обнаружения медленно летящих и зависших целей.
В качестве решения, являющегося наиболее близким по технической сущности заявленному способу, является способ, описанный в [2]. Этот способ, который может быть использован в качестве прототипа предлагаемому способу, основан на том, что при многолучевом распространении отраженного от цели сигнала, при наличии сигнала от антипода с помощью моноимпульсного радиолокатора с суммарно-разностным преобразователем и фазовым методом пеленгования проводят квадратурную обработку разностного сигнала, определяют мнимую составляющую сигнала в разностном канале преобразователя и вырабатывают управляющий сигнал для устранения мнимой составляющей.
Данный способ позволяет выделить низколетящие цели, включая зависшие цели с нулевой скоростью, на фоне отражений от местных предметов, и в этом заключается его достоинство. Однако данный способ имеет следующие недостатки.
1. Характеристика мнимой составляющей m=f(ε) (ε - угол места цели), по которой судят о сигнале от антипода, не является однозначной функцией от ε, как это показано в [3]. Поэтому без дополнительных признаков сигнала от цели задача обнаружения в некоторых случаях становится неопределенной и может иметь ложные решения.
2. Указанные в способе отличительные признаки не позволяют отличить сигналы от зависших целей, имеющих нулевую скорость, от сигналов зависших помех (как правило, искусственно созданных), имеющих такую же нулевую скорость. Для устранения указанного недостатка также необходим дополнительный признак от цели, с помощью которого можно однозначно определить сигнал от цели.
Таким образом, известные способы для обнаружения низколетящих целей с очень малой скоростью перемещения на фоне естественных и искусственных пассивных помех имеют в силу присущих им недостатков ограничения по применению и требуют для повышения надежности обнаружения дополнительных функциональных операций по обработке сигналов РЛС.
В связи с этим целью изобретения является повышение достоверности обнаружения целей на фоне пассивных помех с максимальным использованием методов и средств, применяемых в современной моноимпульсной радиолокации.
Для получения дополнительных признаков о цели, позволяющих отличить сигнал, отраженный от реальной цели с работающим двигателем и вращающимися лопастями винта, от сигнала, отраженного от пассивной помехи, авторы предлагают учитывать возмущенное состояние среды вокруг реальной цели, приводящее к низкочастотным изменениям электрофизических параметров среды (плотность, диэлектрическая проницаемость и др.) и, как следствие этого, к изменению условий распространения зондирующей и отраженной электромагнитной волны.
Поставленная цель в предлагаемом способе, основанном на многолучевом распространении отраженного от цели сигнала, излучаемого моноимпульсным радиолокатором с фазовой пеленгацией, в котором принимаемые сигналы преобразовываются в суммарно-разностном преобразователе и в блоке квадратурной обработки, анализируются мнимые составляющие сигналов в разностном канале преобразователя, достигается тем, что в режиме поиска цели определяют наличие вещественной составляющей сигнала в суммарном канале преобразователя, кроме того, анализируют в суммарном канале преобразователя фазу высокочастотного сигнала на предмет наличия в сигнале низкочастотной модуляции фазы, после полученных результатов делают вывод об обнаружении цели.
Обнаружение воздушных целей представляет собой вероятностный процесс, в ходе которого могут быть получены как правильные, так и неправильные решения.
С уменьшением высоты полета цели вероятность обнаружения ее снижается. Это обусловлено прежде всего тем, что интенсивность мешающих отражений от местных предметов может превышать на 60-80 дБ уровень собственных шумов приемника РЛС. Это приводит к перегрузке приемного тракта приемника и потере полезного отраженного от цели сигнала.
Для теоретического обоснования и возможности реализации предлагаемого способа рассмотрим случай распространения излученных и приема отраженных моноимпульсной РЛС электромагнитных волн, когда излучение распространяется вблизи границы раздела двух сред.
В случае пеленга цели Ц, находящейся вблизи раздела двух сред, РЛС, расположенной в точке А, антенной будут приниматься два сигнала - прямой с направления ЦА и переотраженный с направления Х0А (фиг.1).
Разность фаз сигналов ϕ определяется изменением фазы при переотражении сигнала поверхностью ϕ0 и запаздыванием сигнала из-за разности хода лучей Δr0:
ϕ = ϕ0+(2π/λ)Δr0,
где ,
,
где h - высота антенны РЛС;
Н - высота цели;
r - расстояние до цели;
ϕ0 - фаза;
λ - длина волны.
Из фиг.1 и выражения (1) следует, что на входе антенны происходит интерференция прямого и переотраженного сигналов и суммарный сигнал ее равен
ec=епр+еотр, (2)
где епр - сигнал с направления ЦА;
еотр - сигнал с направления X0A.
Следовательно, модель ошибок пеленга объекта по углу места эквивалента двухточечной модели: одной светящейся точкой является сам объект Ц, а другой - его мнимое изображение Ц', лежащее на продолжении направления АX0. Это мнимое изображение Ц' является "антиподом" объекта. Светящиеся точки имеют угловой разнос, равный
γ1 = ε0+γ ≈ 2H/r
Таким образом, на вход приемной системы моноимпульсной РЛС поступает сигнал, отраженный от цели, в котором содержится как реальная, так и мнимая часть, обусловленная наличием "антипода".
При облучении РЛС местного предмета, который является по своей сути протяженной по высоте целью, во входном сигнале ес возникают угловые шумы как за счет протяжения самой цели, так и за счет многолучевого распространения.
В качестве примера рассмотрим расположенную на гладкой поверхности раздела линейную, протяженную по высоте цель, представляющую собой совокупность непрерывно распределенных, статистически независимых светящихся точек с одинаковой интенсивностью сигналов (см. фиг.2).
Как показано в [4], для этой цели могут быть рассчитаны параметры распределения углового шума:
где η - безразмерная угловая ошибка;
ρ - коэффициент переотражения сигнала поверхностью раздела;
μ - параметр распределения Стъюдента,
откуда видно, что при ρ=0 (отсутствие влияния поверхности раздела) <η>= 1/2, т. е. средний пеленг направлен на середину протяженной цели. При увеличении ρ средний пеленг "сползает" к поверхности раздела, а параметр μ уменьшается, т.е. разброс отклонений пеленга от среднего увеличивается. При ρ=1 <η>= 0, т. е. средний пеленг направлен на поверхность раздела (совпадает с направлением АО' на фиг.2).
Таким образом, местный предмет с точки зрения радиолокации представляет собой одну флуктуирующую "светящуюся точку", координаты которой зависят в основном от качества поверхности раздела, но эффект "антипода" от него не возникает и в отраженном от местного предмета сигнале отсутствует мнимая часть.
Из оказанного можно сделать вывод, что в мнимой части отраженного сигнала Im, полученного в условиях его многолучевого распространения, содержится информация о наличии цели вблизи границы раздела двух сред. Дополнительным подтверждением наличия цели, повышающим достоверность обнаружения цели, должно быть присутствие и вещественной составляющей сигнала Re.
Однако выполнение условия Im(ε)>0 и Re(ε)>0 недостаточно для того, чтобы отличить сигнал, отраженный от неподвижной цеди ец (например, от зависшего вертолета), от сигнала, отраженного от пассивной помехи еп и представляющего собой две светящиеся точки: реальный сигнал помехи R(еп) и сигнал мнимого изображения Im(еп).
Для того, чтобы селектировать сигналы еп и ец, предлагается использовать дополнительную информацию, учитывающую состояние среды вокруг цели. Реальная цель с работающим двигателем и вращающимися лопастями винта в плотных слоях атмосферы создает неоднородности среды по плотности, влажности и т.д., что вызывает вокруг цели флуктуирующую неоднородность электрофизических сред, что в свою очередь приводит к изменению скорости распространения электромагнитных волн ΔV на участках с неоднородностью среды. Приближенная оценка изменения скорости ΔV при учете только одного фактора (вращающихся винтов вертолета с шумом 40 дБ и, как следствие, возникновение пульсаций атмосферного давления и соответствующего пульсирующего изменения диэлектрической проницаемости среды) составляет около 0,01%. При фазовой пеленгации РЛС изменение скорости ΔV приведет к изменению фазы Ψ(ΔV) отраженного сигнала, что можно проявить в суммарном канале преобразователя.
Совокупность всех используемых дополнительных признаков позволяет повысить вероятность обнаружения цели в условиях пассивных помех и наличия отражений от местных предметов.
Заявленный способ обнаружения может быть реализован на основе моноимпульсного радиолокатора с фазовой пеленгацией и суммарно-разностным дискриминатором [2] путем включения в схему дискриминатора дополнительных устройств: амплитудного детектора АД, измерителя фазы ИФ и фильтра низких частот ФНЧ, а также анализатора сигналов Re(ε), Im(ε), Ψ(ΔV) с блоком принятия решения (АБ). Упрощенная структурная схема в соответствии с заявленным способом представлена на фиг.3, где функциональные звенья: генератор (Г), смеситель (См), усилитель промежуточной частоты (УПЧ), фазовый детектор (ФД) и фазовращатель  применяются для реализации способа-прототипа и функциональные звенья: амплитудный детектор (АД), измеритель фазы (ИФ), фильтр низкой частоты (ФНЧ) и анализатор с блоком принятия решения (АБ) - это дополнительные звенья, необходимые для реализации предлагаемого способа.
применяются для реализации способа-прототипа и функциональные звенья: амплитудный детектор (АД), измеритель фазы (ИФ), фильтр низкой частоты (ФНЧ) и анализатор с блоком принятия решения (АБ) - это дополнительные звенья, необходимые для реализации предлагаемого способа.
Дополнительные звенья вырабатывают сигналы Re(ε), Im(ε) и Ψ(ΔV), наличие которых достаточно для принятия решения об обнаружении цели. Одновременное поступление трех информационных сигналов повышает достоверность информации и надежность правильного принятия решения.
Литература
1. Справочник по основам радиолокационной техники. По редакцией Дружинина В.В.- М.: Воениздат, 1976, с.786.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, с.311.
3. Авторское свидетельство N 2080619, G 01 S 13/44.
4. Островитянов Р. В., Басалов Ф.А. Статистическая теория радиолокации протяженных целей. - М.: Радио и связь, 1962, с.328.
Изобретение относится к маловысотной радиолокации и может быть использовано для обнаружения зависших и летящих с малой скоростью целей на фоне сигналов местных предметов и пассивных помех. Достигаемым техническим результатом изобретения является повышение достоверности обнаружения целей на фоне пассивных помех с максимальным использованием методов и средств, применяемых в современной моноимпульсной радиолокации. Поставленная цель достигается тем, что в режиме поиска цели определяют наличие вещественной составляющей сигнала в суммарном канале преобразователя, кроме того, анализируют в суммарном канале преобразователя фазу высокочастотного сигнала на предмет наличия в сигнале низкочастотной модуляции фазы, после полученных результатов делают вывод об обнаружении цели. 3 ил.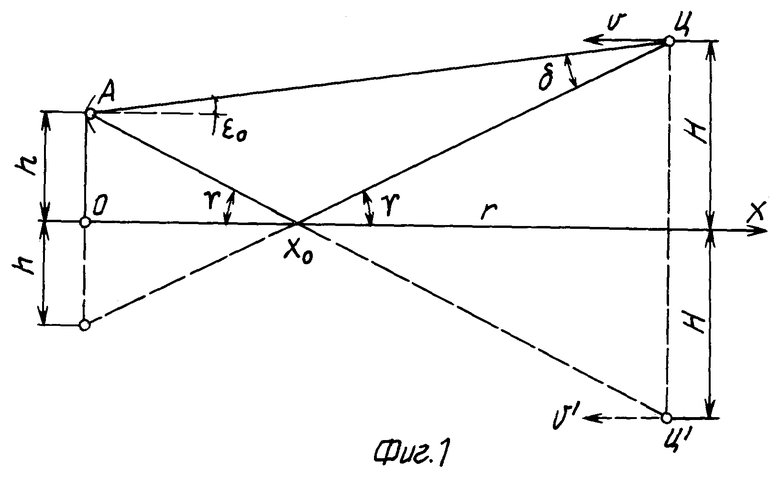
Способ обнаружения низколетящих целей при многолучевом распространении отраженного от цели сигнала моноимпульсным радиолокатором с суммарно-разностным преобразователем, определением наличия мнимой составляющей сигнала Im(ε) в разностном канале преобразователя и вещественной составляющей сигнала Re(ε) в суммарном канале преобразователя, отличающийся тем, что дополнительно определяют в суммарном канале преобразователя наличие в высокочастотном сигнале низкочастотной модуляции фазы Ψ и изменение фазы Ψ(ΔV) отраженного сигнала, где ΔV - изменение скорости распространения электромагнитных волн на участках с неоднородностью среды, при одновременном наличии сигналов Im(ε), Re(ε), Ψ(ΔV) принимают однозначное решение об обнаружении цели.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| - М.: Радио и связь, 1984, с.311 | |||
| US 4296415, 20.10.1981 | |||
| US 5101209 А, 31.03.1992 | |||
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
