Изобретение относится к радиолокационной технике и может быть использовано для определения факта применения в составе средств воздушного нападения (СВН) самонаводящихся противорадиолокационных ракет (ПРР) с различными видами поляризации антенн в пассивных головках самонаведения (ГСН).
Известно радиолокационное устройство распознавания целей [1], состоящее из индикатора и приемопередатачика, содержащего генератор, импульсный модулятор (ИМ), усилитель мощности (УМ), антенный переключатель (АП), антенну, 1-й и 2-й смесители, гетеродин, усилитель промежуточной частоты (УПЧ) и фазовый детектор (ФД). В данном устройстве генератор соединен своим выходом с 1-м входом 1-го смесителя и 1-м входом УМ, 2-й вход которого соединен с выходом ИМ, а выход - с антенной через АП, выход которого подключен к 1-му входу 2-го смесителя, 2-й вход которого соединен с выходом 1-го смесителя, а выход соединен со входом УПЧ, выход которого подключен ко 2-му входу ФД, выход которого соединен с индикатором, а 1-й вход - с выходом гетеродина и со 2-м входом 1-го смесителя.
Указанное устройство не обеспечивает высокой достоверности распознавания воздушных целей, так как оно не может распознавать неподвижные и малоподвижные цели на фоне местных предметов и метеообразований, а также цели, имеющие одинаковые радиальные составляющие вектора скорости. Это устройство не способно селектировать обычные цели и самонаводящиеся ПРР.
Известно также устройство распознавания ПРР [2], состоящее из усилителя высокой частоты (УВЧ), делителя (блока деления), синхронизатора, 1-й и 2-й антенн, 1-го и 2-го накапливающих сумматоров, ИМ, УМ, АП, блока идентификации (БИ), генератора, 1-го и 2-го смесителей, 1-го и 2-го коммутаторов, гетеродина, амплитудного детектора (АД) и УПЧ. В данном устройстве выход синхронизатора соединен со входом ИМ, входом 1-го коммутатора и 2-м входом 2-го коммутатора, который соединен своим 1-м входом с выходом АД, 2-м выходом - со входом 1-го накапливающего сумматора, а 1-м выходом - со входом 2-го накапливающего сумматора, выход которого соединен с 1-м входом делителя, 2-й вход которого подключен к выходу 1-го накапливающего сумматора, а выход - ко входу БИ. Вход-выход 1-й антенны соединен с 1-м входом - выходом 1-го коммутатора, 2-й вход-выход которого соединен с входом-выходом 2-й антенны, а 3-й вход-выход - с входом-выходом АП, который своим входом подключен к выходу УМ, 1-й вход которого соединен с выходом ИМ. Выход генератора соединен с 1-м входом 1-го смесителя, выход которого подключен к 2-му входу УМ, а 2-й вход - к выходу гетеродина и 2-му входу 2-го смесителя, 1-й вход которого подключен к выходу УВЧ, а выход - ко входу УПЧ, связанного своим выходом со входом АД. При этом выход АП соединен со входом УВЧ.
Описанное устройство [2] в сравнении с известным устройством [1] способно отличить самонаводящуюся ПРР от обычной воздушной цели, если ГСН сопровождаемой ПРР имеет антенну с линейной поляризацией. Селекция ПРР производится за счет явного отличия уровней сигналов, отраженных от самонаводящейся ПРР, на вертикальной и горизонтальной поляризациях зондирующей электромагнитной волны (ЭМВ). Однако данное устройство не сможет селектировать аэродинамические цели (АДЦ) и ПРР при наличии в ГСН ПРР приемной антенны с круговой поляризацией.
Изобретение имеет следующую задачу: за счет увеличения количества антенн и применения в некоторых из них конструкции, позволяющей работать с ЭМВ на круговой поляризации правого и левого вращения, добиться возможности селектировать ПРР на фоне других целей независимо от вида поляризации антенны, используемой в ГСН самонаводящейся ПРР.
Для решения поставленной задачи известное устройство распознавания ПРР [2] дополняют следующими элементами: двумя антеннами круговой поляризации, блоком управления коммутатором (БУК), двумя коммутаторами, последовательно включенными счетчиком импульсов и линией задержки (ЛЗ). При этом выход ЛЗ подключают к 2-м входам 1-го и 2-го накапливающих сумматоров, выход счетчика импульсов соединяют с 3-м входом блока деления (БД), выход которого подключают ко входу БУК, выход которого соединяют со входом 3-го коммутатора, 1-й вход-выход которого подключают к 3-му входу-выходу 1-го коммутатора, 3-й вход-выход - ко входу-выходу АП, а 2-й вход-выход - к 3-му входу-выходу 4-го коммутатора, 1-й вход-выход которого соединяют с входом-выходом 3-й антенны, 2-й вход-выход - с входом-выходом 4-й антенны, а вход - с выходом синхронизатора. Выход ИМ соединяют при этом со входом счетчика импульсов.
Данное построение схемы позволяет предлагаемому устройству селектрировать самонаводящиеся ПРР на фоне обычных АДЦ за счет анализа уровней сигналов, принятых сначала на 2-х круговых поляризациях противоположного вращения, а затем - на 2-х линейных ортогональных друг другу поляризациях. При этом результат селекции не зависит от того, какая поляризация у антенны ПРР.
На чертеже приведена структурная схема предлагаемого устройства селекции самонаводящихся ПРР.
Устройство селекции самонаводящихся ПРР содержит 1-ю антенну 1, синхронизатор 2, третью антенну 3, БУК 4, 1-й коммутатор 5, 3-й коммутатор 6, 4-й коммутатор 7, БИ 8, 2-ю антенну 9, 4-ю антенну 10, ЛЗ 11, ИМ 12, УМ 13, АП 14, счетчик импульсов 15, генератор 16, 1-й смеситель 17, УВЧ 18, БД 19, 1-й накапливающий сумматор 20, гетеродин 21, 2-й смеситель 22, 2-й накапливающий сумматор 23, 2-й коммутатор 24, АД 25 и УПЧ 26. Межблочные связи устройства представлены на чертеже.
Устройство селекции самонаводящихся ПРР работает следующим образом.
Гетеродин 21 вырабатывает высокочастотные колебания на частоте fо, которые поступают на 2-й вход 1-го смесителя 17 и на 2-й вход 2-го смесителя 22. На 1-й вход 1-го смесителя 17 поступает сигнал генератора 16 на промежуточной частоте Fпр, который взаимодействует с сигналом гетеродина 21, обеспечивая на выходе 1-го смесителя 17 непрерывный сигнал на частоте fо + Fпр. Этот сигнал поступает на 2-й вход УМ 13, на 1-й вход которого подается модулирующий сигнал с выхода ИМ 12, запускаемого импульсами синхронизатора 2. В результате на выходе УМ 13 формируется импульсный сигнал, заполненный колебаниями на частоте fо + Fпр, который подается далее на вход АП 114, вход-выход которого соединен с входом-выходом 3-го коммутатора 6. Коммутатор 6 служит для переключения устройства с режима приема-передачи сигналов с круговой поляризацией на режим приема-передачи сигналов с линейной поляризацией.
Включение в схему устройства селекции 3-го коммутатора 6 обусловлено тем, что современные ПРР могут иметь в ГСН антенны, работающие с сигналами либо линейной, либо круговой поляризации. Самое главное, что заранее неизвестно, с какой поляризацией будет ГСН той или иной самонаводящейся ПРР. Прежде чем описать принцип работы предлагаемого устройства селекции ПРР, покажем общий замысел и физический смысл выявления ПРР с неизвестным видом поляризации.
Если антенна ГСР у ПРР имеет круговую поляризацию, то сигналы с линейной поляризацией, как горизонтальной, так и вертикальной, будут отражаться от ГСН одинаково, и разницы в их амплитуде не будет (вариант частичной поляризационной согласованности). Заметим, что сигнал, отраженный от ГСН самонаводящейся ПРР, будет превуалировать над сигналами, отраженными всеми другими частями ПРР, так как им специально придается обтекательная форма, сопутствующая хорошей аэродинамике полета ПРР. Если же зондирующий сигнал будет сам иметь круговую поляризацию, то в зависимости от совпадения или несовпадения направления ее вращения с направлением вращения поляризации антенны ГСН уровень отраженного сигнала будет резко отличаться. При полном поляризационном согласовании зондирующий сигнал будет максимально поглощаться приемником ГСН. При полной поляризационной развязке, то есть при несовпадении направлений вращения поляризации, падающая на ГСН ПРР волна будет практически полностью переотражена в обратном направлении. В случае же обычной АДЦ уровни отраженных на поляризациях разного вращения сигналов будут отличаться незначительно, то есть будут практически одинаковыми. То же самое будет наблюдаться в случае, если у ГСН самонаводящейся ПРР поляризации антенны будет линейной. В данном случае будет работоспособна та часть устройства, которая заимствована из прототипа. Причины этого указаны в [2]. Исходя из вышеуказанного, предлагается следующий алгоритм работы устройства:
а) попеременно излучаются сигналы на 2-х круговых поляризациях противоположного вращения;
б) принятые на указанных поляризациях сигналы сравниваются между собой путем деления уровня одного на уровень другого;
в) в случае, если частное от деления K сильно отличается от единицы (0,8 > K > 1,2), принимается решение, что цель является самонаводящейся ПРР;
г) в случае, если K входит в диапазон 0,8-1,2, изменяется вид поляризации излучаемой ЭМВ, и далее попеременно излучаются сигналы с вертикальной и горизонтальной линейными поляризациями;
д) повторяются действия, указанные в пунктах б) и в);
е) в случае, если и на линейно поляризованных зондирующих сигнальных K входит в диапазон 0,8-1,2, принимается решение, что сопровождается обычная воздушная АДЦ.
Теперь покажем, как указанный алгоритм реализован в предложенном устройстве.
Коммутатор 6 в исходном состоянии соединяет (замыкает) свои 2-й и 3-й входы-выходы, причем его 2-й вход-выход соединен с 3-м входом-выходом 4-го коммутатора 7. В этом случае излучение зондирующих сигналов в направлении цели производится 3-й и 4-й антеннами 3 и 10. Для того, чтобы от импульса к импульсу менялось направление вращения ЭМВ, имеющей круговую поляризацию, используется 4-й коммутатор 7. Его работа, подробно описанная в [2], заключается в следующем. На управляющий вход 4-го коммутатора 7 подаются синхронизирующие импульсы с выхода синхронизатора 2. Коммутатор 7, управляемый этими синхроимпульсами, поочередно соединяет свой 3-й вход-выход со 2-м или 1-м входом-выходами. Поэтому каждый четный импульс со входа-выхода АП 14 через 3-й коммутатор 6 проходит далее через 1-й вход-выход 4-го коммутатора 7 на вход-выход 3-й антенны 3, а каждый нечетный импульс аналогичным образом через 2-й вход-выход 4-го коммутатора 7 попадает на вход-выход 4-й антенны 10. Антенны 3 и 10 имеют такую конструкцию, что излучают сигналы с круговой поляризацией, но обязательно противоположного вращения. Примеры спиральных антенн, излучающих сигналы с круговой поляризацией, приведены в [3, 4]. В зависимости от направления закрутки спирали антенна может излучать правополяризованную или левополяризованную ЭМВ. Таким образом, если каждый четный импульс будет, к примеру, левополяризованным, то каждый нечетный импульс будет правополяризованным, либо наоборот.
Уровень отраженного от обычной АДЦ сигнала в квазиоптической области отражения радиоволн инвариантен к направлению вращения поляризационного эллипса или круга. Различие отражений от АДЦ на взаимно противоположных по направлению вращения круговых или эллиптических поляризациях может быть вызвано только отражением от антенны бортовой РЛС АДЦ, если она имеет одну из указанных поляризаций, да и то лишь в том случае, если антенна бортовой РЛС постоянно следит за источником излучения, что само по себе маловероятно, так как бортовые РЛС не работают в режиме пассивной пеленгации наземных РЛС.
Совсем другое дело - самонаводящиеся ПРР. Их ГСН постоянно следят за источником излучения, то есть их антенны всегда направлены в сторону излучающей РЛС. Если поляризация ГСН будет круговой и по направлению вращения совпадает с поляризацией зондирующего сигнала, то практически весь принятый зеркалом антенны ГСН сигнал будет поглощаться согласованным входом приемника самонаводящейся ПРР. Отражение в данном случае будет минимально. Если же направления вращения поляризацией противоположны, то это соответствует полной поляризационной развязке, и отраженный сигнал будет максимален. В случае, если ГСН ПРР имеет антенну с линейной поляризацией, то при зондировании с круговой поляризацией, независимо от направления ее вращения, отраженные сигналы будут одинаковыми (пример частичной поляризационной согласованности).
Какой бы из указанных выше вариантов не имел место, отраженные селектируемой целью сигналы принимаются 3-й антенной 3 и 4-й антенной 10, а затем через 4-й коммутатор 7 и 3-й коммутатор 6 с его 3-го входа-выхода подаются на вход-выход АП 14, пройдя который поступают на вход УВЧ 18. Там происходит их усиление на высокой частоте. С выхода УВЧ 18 принятые сигналы поступают на 1-й вход 2-го смесителя 22, на 2-й вход которого подается непрерывный сигнал на частоте fо. Преобразование частоты в блоке 22 приводит к тому, что на выходе 2-го смесителя формируется сигнал на частоте Fпр, который поступает на вход УПЧ 26, где производится его основное усиление. Далее сигнал поступает на вход АД 25, где выделяется его огибающая, которая подается на 1-й вход 2-го коммутатора 24. Второй (синхронизирующий) вход блока 24 связан с выходом блока 2. Работа 2-го коммутатора аналогична работе 2-го коммутатора прототипа [2] . За счет подачи синхроимпульсов на его управляющий вход он направляет все четные видеоимпульсы на 1-й вход 1-го накапливающего сумматора 20, а все нечетные видеоимульсы - на 1-й вход 2-го накапливающего сумматора 23. Блоки 20 и 23 являются по существу интеграторами. Выходной сигнал накапливающего сумматора равен сумме амплитуд поочередно поступающих на его вход сигналов. По приходу на 2-й вход такого накапливающего сумматора управляющего сигнала производится сброс, то есть обнуление выходного сигнала, после чего сумматор снова готов к накоплению.
На выходе 1-го накапливающего сумматора 20 получается сигнал, равный сумме амплитуд сигналов, поступивших за определенное время с 3-й антенны 3, имеющей, как вариант, круговую поляризацию правого вращения. На выходе блока 23 получается, соответственно, сигнал, равный сумме амплитуд сигналов, поступивших за такой же интервал с 4-й антенны 10, имеющей, как вариант, круговую поляризацию левого вращения. Время накопления сигналов определяется приходом управляющего сигнала на 2-е входы блоков 20 и 23, о котором будет сказано ниже. С выходов 1-го и 2-го накапливающих сумматоров 20 и 23 сигналы подаются соответственно на 2-й и 1-й входы БД 19. Выходной сигнал данного блока пропорционален частному от деления амплитуд сигналов, поступивших на его 1-й и 2-й входы. При этом не принципиально, какой из входов БД 19 принимает сигнал правополяризованной ЭМВ, а какой - левополяризованной ЭМВ, поскольку в итоге оценивается факт равенства или неравенства накопленных сигналов с 3-й и 4-й антенн. Накопление необходимо потому, что в этом случае на результат селекции ПРР уменьшается влияние вредных случайных факторов (помехи, скачки питающих напряжений, болтанка цели в полете). Увеличение средней вероятности принятия правильного решения при накоплении отраженных сигналов является известным фактом. Число N интегрируемых (накапливаемых) импульсов ограничивается допустимым временем одного цикла селекции Tс и равно N=Tc/(4Tи), где Tи - период повторения импульсов, задаваемый ИМ 12. Число N в 2 раза меньше, чем у прототипа [2], поскольку в случае равенства амплитуд сигналов круговой поляризации на выходе 1-го и 2-го накапливающих сумматоров процесс селекции после смены вида поляризации зондирующих сигналов повторяется. С другой стороны, время селекции Tс не должно быть меньше удвоенного времени анализа наиболее широкого лепестка диаграммы обратного рассеяния (ДОР) цели [5, 6]. Наиболее широкий лепесток ДОР соответствует цели наименьших размеров. Например, приняв минимальный размер цели Lмин за величину Lмин = 1 м, при длине волны λ = 3 см ширина лепестка ДОР θмакс будет определяться по формуле θмакс= λ/(2Lмин) = 0,015 рад = 0,855°. Тогда время селекции цели не должно уступать величине Tc= 2θмакс/ωц, где ωц - угловая скорость поворота цели в полете. Если допустить, что цель совершает рыскания с угловой скоростью ωц= 2°/с, то Tс = 0,855 с. Тогда при Tи = 10-4 с N= Tc/(4Tи)=1069, а при Tи = 10-3 с N = 107.
Для каждой РЛС, исходя из ее параметров, число N накапливаемых импульсов будет своим. Метод его нахождения показан выше. В соответствии с этим числом N счетчик импульсов 15 вырабатывает управляющий импульс, который соответствует приходу на вход блока 15 N-го импульса с выхода ИМ 12. Выработанный в блоке 15 управляющий импульс поступает на 3-й вход БД 19 и на вход ЛЗ 11. Блок деления 19 постоянно рассчитывает частное от деления амплитуд сигналов на его 1-м и 2-м входах. Однако сигнал, пропорциональный рассчитанному частному K, проходит на выход блока 19 только при наличии на его 3-м входе управляющего импульса. Одновременно управляющий сигнал поступает на вход ЛЗ 11, где задерживается на величину своей длительности (эта величина является заранее известной, она и определяет время задержки ЛЗ), после чего поступает на 2-е входы накапливающих сумматоров 20 и 23, заставляя их обнулить сигналы свои на выходах, то есть подготавливая их к очередному этапу накопления. Задержка необходима для того, чтобы во время снятия с выхода БД 19 частного от деления K, сигнал сброса еще не успел поступить на 2-е входы блоков 20 и 23. Если выходные сигналы блоков 20 и 23 принадлежат АДЦ или ПРР с ГСН, имеющей антенну линейной поляризации, то результат деления в БД 10 будет тем ближе к единице, чем большее количество импульсов используется при суммировании. Если же сопровождается ПРР с антенной круговой поляризации, то результат деления будет либо близок к нулю, либо будет иметь очень большую величину. Выходной сигнал БД 19 поступает на вход БУК 4 и БИ 8. В БИ 8 этот сигнал сравнивается с установленным интервалом (например, от 0,8 до 1,2) допустимых значений. При попадании амплитуды сигнала в пределы этого интервала, процесс селекции ПРР продолжается. В противном случае принимается решение, что исследуемая цель является самонаводящейся ПРР. Результат селекции в данном случае выводится для зрительного восприятия на панель световой индикации БИ 8, где загорается лампа с соответствующей надписью (ВНИМАНИЕ - ППР1). БУК 4 также сравнивает свой входной сигнал с заданным диапазоном (0,8 - 1,2). Если сигнал "вписывается" в этот диапазон, БУК 4 формирует на своем выходе импульс, поступающий на управляющий вход 3-го коммутатора 6. Если входной сигнал БУК 4 выходит за пределы установленного диапазона, то БУК 4 выходного сигнала не вырабатывает. При наличии на управляющем входе блока 6 сигнала из БУК 4 3-й коммутатор 6 переключается в свое 2-е устойчивое состояние, соединения свой 3-й вход-выход с 1-м входом-выходом (отключая АП 10 от 4-го коммутатора 7). При этом зондирующие импульсы с входа-выхода АП 10 проходят на 3-й вход-выход 1-го коммутатора 5, работа которого аналогична работе 4-го коммутатора 7, так как на его управляющем входе также присутствуют синхроимпульсы с выхода блока 2. Коммутатор 5 поочередно соединяет 1-й вход-выход 3-го коммутатора 6 с 1-й антенной 1 и 2-й антенной 9. Обе эти антенны имеют линейную поляризацию, но обязательно ортогональную друг другу (например, антенна 1-горизонтальную, а антенна 9 - вертикальную). Принцип работы антенн 1 и 9 подробно описан в [2]. Каждый четный излученный импульс будет иметь горизонтальную поляризацию, а каждый нечетный - вертикальную поляризацию.
Как и в случае с 3-й и 4-й антеннами, уровень отраженного от АДЦ сигнала с линейной поляризацией почти инвариантен к конкретному виду поляризации (вертикальная, горизонтальная, наклонная). Отражения на горизонтальной и вертикальной поляризации могут отличаться лишь в случае наличия у цели антенны бортовой РЛС, если она имеет одну из указанных поляризаций. Однако такой случай маловероятен по причинам, указанным ранее. Значит различие в уровне принятого сигнала может быть порождено только отражением от линейно поляризованной антенны ГСН самонаводящейся ПРР, так как она всегда направлена в сторону наземной РЛС. Если поляризация зондирующего сигнала совпадает с поляризацией антенны ПРР, то принятый ее ГСН сигнал будет сфокусирован на коллинеарном по поляризации облучателе ГСН, а далее будет поглощен согласованным входом приемника. При другом (ортогональном) виде поляризации сигнал будет полностью переотражен в сторону стационарной РЛС.
Отраженные селектируемой целью сигналы принимаются 1-й и 2-й антеннами 1 и 9 и через 1-й коммутатор 5 и 3-й коммутатор 6 подаются на вход-выход АП 14. Далее сигналы проходят обработку аналогично той, которую претерпевали сигналы, принятые 3-й и 4-й антеннами (описано выше). Просуммированные в блоках 20 и 23 сигналы четных и нечетных периодов зондирования поступают на входы БД 19, работа которого уже описывалась. Если эти сигналы отражены обычной АДЦ, то результат деления будет близок к единице с незначительным отклонением, обусловленным случайными мешающими факторами. Если бы сигналы принадлежали ПРР, у которой антенна ГСН имеет круговую поляризацию, то различие в уровнях сигналов было бы зафиксировано в 1-м этапе селекции, когда работали 3-я и 4-я антенны 3 и 10. Если же сопровождается самонаводящаяся ПРР с линейной поляризацией антенны ГСН, то уровни просуммированных сигналов на 2-х ортогональных поляризациях будут резко отличаться, и результат деления K обязательно выйдет за пределы установленного диапазона (0,8 - 1,2), что будет зафиксировано в БИ 8 и выведено на панель световой индикации в виде загорания лампы с соответствующей надписью. БУК 4 при этом не срабатывает и 3-й коммутатор 6 останется в прежнем положении, то есть будет продолжено излучение 1-й и 2-й антеннами. Если исследуемый сигнал БД 19 входит в диапазон сигналов обычных АДЦ, БИ 8 информации о ПРР не выдает, а БУК 4 срабатывает и переключает устройство на режим приема-передачи с помощью 3-й и 4-й антенн. Легко заметить, что при сопровождении цели режим приема-передачи будет периодически безостановочно меняться до тех пор, пока на одном из видов поляризации (круговой или линейной) зондирующий сигнал не совпадает по поляризации с поляризацией антенны ГСН ПРР. В этом случае смена режимов приема-передачи прекратится, а БИ 9 выдаст информацию о сопровождении самонаводящейся ПРР. Отсутствие на табло индикации БИ 8 информации о ПРР говорит о сопровождении обычной воздушной цели.
Как видно из описания работы устройства, оно способно обеспечить качественную селекцию самонаводящихся ПРР на фоне обычных АДЦ, причем достоверность селекции не зависит от вида поляризации антенны, применяемой в ГСН сопровождаемой самонаводящейся ПРР. Применение данного устройства в структуре импульсной РЛС специального назначения позволит своевременно определить факт использования ПРР и предотвратить ликвидацию наземной стационарной РЛС, используя известные методы борьбы с ПРР [7].
Литература
1. Авиационные радиолокационные устройства / Под ред. П.И. Дудника.- М.: ВВИА им. Н.Е. Жуковского, 1986, С. 201, рис. 7.13 (аналог).
2. Патент РФ N 2087782, МПК6 G 01 S 13/02. Устройство распознавания противорадиолокционных ракет. Авторы: Ермоленко В.П., Митрофанов Д.Г. Заявка N 96109815/09. Приоритет 21.05.96 г. Опубл. 27.11.97 г. Бюллетень изобретений N 33, Часть 2, 1997 г., С. 459 (прототип).
3. Сазонов Д.М. Антенны и устройства СВЧ. Учеб. для радиотехнич. спец. вузов. - М.: Высшая школа. 1988. - 432 с.
4. Лавров А.С., Резников Г.Б. Антенно-фидерные устройства. Киев. КВИАБУ ВВС. 1969. - 560 с.
5. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. - 536 с.
6. Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. Учебное пособие для вузов. -М.: Сов. радио. 1970. - 560 с.
7. Головин С. А. , Сизов Ю.Г., Скоков А.Л., Хунданов Л.Л. Высокоточное оружие и борьба с ним. -М.: Издательство ВПК. 1996, - 231 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ РАЗМЕРОВ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ РЛС В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 1999 |
|
RU2150714C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ ПАРАМЕТРОВ МАЛОУДАЛЕННЫХ ОБЪЕКТОВ | 1999 |
|
RU2158006C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ МЕСТНЫХ ПРЕДМЕТОВ | 2000 |
|
RU2201602C2 |
Изобретение относится к радиолокационной технике и может быть использовано для селекции самонаводящихся противорадиолокационных ракет (ПРР) при различном по поляризации импульсном зондировании в квазиоптической области отражения радиоволн. Изобретение решает задачу обеспечения возможности селектирования ПРР и обычных аэродинамических летательных аппаратов независимо от типа поляризации, применяемого в антенне ПРР, что и является достигаемым техническим результатом. Для решения поставленной задачи известное устройство распознавания ПРР дополняют двумя антеннами, блоком управления коммутатором, двумя коммутаторами, последовательно включенными счетчиком импульсов и линией задержки. При этом соответствующим образом изменяют и дополняют межблочные связи. Предложенное новое построение схемы позволяет предлагаемому устройству селектировать ПРР за счет анализа уровней сигналов, принятых антеннами на двух различных поляризациях, расширяет диапазон работы устройства селекции ПРР, делает его более адаптивным и гибким к изменению технического исполнения современных самонаводящихся ПРР. 1 ил.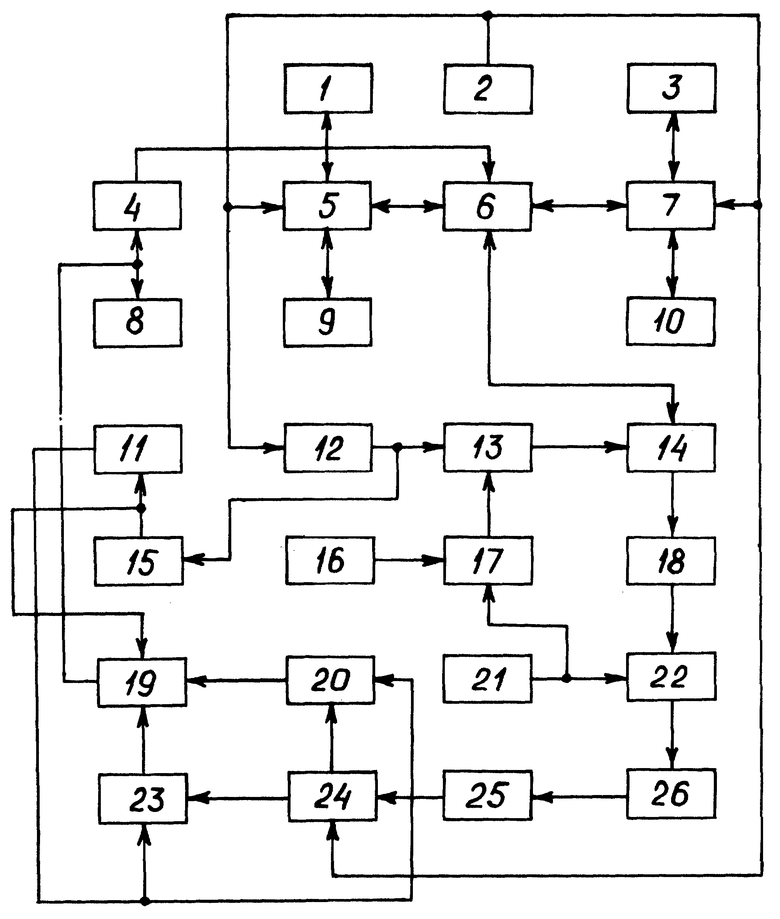
Устройство селекции самонаводящихся противорадиолокационных ракет, состоящее из первой и второй антенн, первого коммутатора, гетеродина, первого накапливающего сумматора, последовательно соединенных генератора и первого смесителя, последовательно включенных синхронизатора, импульсного модулятора, усилителя мощности, антенного переключателя, усилителя высокой частоты, второго смесителя, усилителя промежуточной частоты, амплитудного детектора, второго коммутатора, второго накапливающего сумматора, блока деления и блока идентификации, причем выход синхронизатора соединен со вторым входом второго коммутатора и входом первого коммутатора, первый вход-выход которого соединен с входом-выходом первой антенны, второй вход-выход - с входом-выходом второй антенны, выход гетеродина подключен ко второму входу второго смесителя и второму входу первого смесителя, выход которого соединен со вторым входом усилителя мощности, второй выход второго коммутатора подключен к первому входу первого накапливающего сумматора, выход которого соединен со вторым входом блока деления, отличающееся тем, что в его состав дополнительно введены третья и четвертая антенны, третий и четвертый коммутаторы, блок управления коммутатором, последовательно включенные счетчик импульсов и линия задержки, причем ее выход подключен ко вторым входам первого и второго накапливающих сумматоров, вход счетчика импульсов соединен с выходом импульсного модулятора, а выход - с третьим входом блока деления, выход которого подключен также ко входу блока управления коммутатором, выход которого соединен со входом третьего коммутатора, первый вход-выход которого подключен к третьему входу-выходу первого коммутатора, третий вход-выход - ко входу-выходу антенного переключателя, а второй вход-выход - к третьему входу-выходу четвертого коммутатора, первый вход-выход которого соединен с входом-выходом третьей антенны, второй вход-выход - с входом-выходом четвертой антенны, а вход - с выходом синхронизатора.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| Устройство для стимуляции маточных сокращений | 1971 |
|
SU480413A1 |
| DE 3731559 A1, 06.04.1989. | |||
