Изобретение относится к героторным механизмам винтовых многозаходных гидравлических двигателей, вращение ротора с долотом в которых осуществляется насосной подачей текучей среды, для бурения нефтяных и газовых скважин.
Известен многозаходный героторный механизм винтовой гидравлической машины, содержащий элементы в виде статора и закрепленной в нем обкладки с внутренними винтовыми зубьями, выполненными из эластомера, например из резины, и ротора с наружными винтовыми зубьями, причем число зубьев в обкладке статора больше числа зубьев ротора на единицу, ось статора смещена относительно оси ротора на величину эксцентриситета, равную половине высоты зубьев, а торцовый профиль зубьев одного из элементов выполнен как огибающая исходного контура рейки, очерченной эквидистантой укороченной циклоиды со смещением, при этом торцовый профиль зубьев другого элемента выполнен в виде эквидистанты огибающей первого элемента при обкатывании без проскальзывания их центроид, а величина эквидистантности составляет половину величины диаметрального натяга в зацеплении (RU 2194880 С2, 20.12.2002).
Недостатком известной конструкции является отсутствие возможности изменения натяга и корригирования формы зубьев ротора и статора без изменения наружных диаметров ротора и/или статора.
Известен героторный механизм, содержащий статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев.
Профиль зубьев статора в торцовом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой с радиусом rC1 укороченной циклоиды, а профиль зубьев ротора в торцовом сечении выполнен как огибающая другого исходного контура циклоидальной рейки с радиусом эквидистанты RC2, выполненным больше, чем RC1 или связанным соотношением RC2=RC1+(0,1...0,5)E, где Е - радиус производящей окружности, равный величине эксцентриситета (RU 2166603 С1, 10.05.2001).
Вариантом известного изобретения является выполнение героторного механизма таким образом, что профиль зубьев статора в торцовом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой с радиусом RC1 укороченной циклоиды, а профиль зубьев ротора в торцовом сечении очерчен сопряженными дугами окружностей, при этом выступ зуба ротора очерчен дугой радиуса RB большего, чем радиус эквидистанты статора RC1, или связан с ним соотношением RС2=RС1+(0,1...0,5)Е, а профиль впадины зуба ротора очерчен дугой радиуса RV, зависящего от числа зубьев ротора, его наружного диаметра и эксцентриситета (RU 2166603 С1, 10.05.2001).
Недостатком известного героторного механизма является то, что указанные варианты героторных механизмов требуют осуществления селективной сборки рабочих пар в связи с необходимостью подбора ротора и статора по радиальному натягу.
Кроме того, при работе за счет возникновения бокового натяга, распределенного равномерно при выпукло-вогнутом контакте зуба ротора с впадиной зуба статора, появляется повышенный износ боковых сторон зубьев статора, выполненных из упругоэластичного материала, при этом за счет наличия радиального и бокового натягов в зацеплении возникают силы трения в зонах контакта зубьев, создающие моменты сопротивления, препятствующие вращению ротора вокруг своей оси и его планетарному движению, что ухудшает его энергетические характеристики.
Наиболее близким к заявляемому изобретению является героторный механизм винтовой гидромашины, содержащий статор и эксцентрично расположенный в нем ротор, зубья которых находятся в непрерывном контакте и имеют разницу их чисел, равную единице, торцовые профили статора и ротора образованы общим исходным профилем рейки (зацепления) со смещением, а профиль этого контура очерчен эквидистантой укороченной циклоиды, при этом наибольшее допустимое положительное и наибольшее отрицательное смещения контура рейки заданы с выполнением соотношений:
Δhn≤0,73aZ2 0,5,
|Δhот|≤1,04aZ1 0,41,
а допустимое значение контурного диаметра ограничено пределами:
Dк min≤Dк≤Dк max,
где
Dк max=Df1+2Δhn,
Dк min=Df1-2Δhот,
где Δhn, Δhот - наибольшее допустимое положительное и наибольшее отрицательное смещения, соответственно, контура рейки,
Dк max, Dк min - наибольшее и наименьшее значения контурного диаметра,
а - эксцентриситет зацепления механизма,
Z1, 2 - числа зубьев статора и ротора, соответственно,
Df1 - номинальный диаметр впадин статора при отсутствии смещения исходного контура, который задают по формуле:
Df1=2(rZ2+a+rц),
где Z2 - число зубьев ротора,
r - радиус катящейся окружности, образующей нормальную циклоиду исходного контура рейки,
rс - расстояние от укороченной циклоиды до точек профиля исходного контура рейки (RU 2232317 С1, 10.07.2004).
Недостатком известной конструкции является то, что при выбранном контурном диаметре Dк, величине эксцентриситета "а", числах Z1, 2 зубьев статора и ротора, соответственно, не может быть изменена площадь проходного (живого) сечения, занятая рабочим телом многозаходного героторного механизма и, следовательно, отсутствует возможность улучшить энергетические характеристики, например развиваемую мощность и крутящий момент в двигателе для вращения ротора от насосной подачи текучей среды или развиваемое давление и расход в насосе для подачи текучей среды за счет вращения ротора.
Недостатки известной конструкции объясняются тем, что форма исходного контура зацепления (рейки) стандартизована и задается, по существу, в соответствие с ОСТ 39-164-84, при этом контурный диаметр Dк может быть изменен только путем замены числа зубьев Z1 статора или эксцентриситета "а" зацепления механизма, что накладывает ограничения на оптимизацию характеристик двигателя.
Техническая задача, на решение которой направлено изобретение, заключается в улучшении энергетических характеристик героторного винтового гидравлического двигателя, по существу, развиваемой мощности и крутящего момента, за счет обеспечения большей площади поперечного (живого) сечения, занятой рабочим телом, при одинаковой величине эксцентриситета "а" зацепления механизма, контурном диаметре Dк, числах зубьев обкладки Z1 и ротора Z2.
Сущность технического решения заключается в том, что в героторном винтовом гидравлическом двигателе, содержащем статор, представляющий собой трубчатый корпус с закрепленной в нем обкладкой из эластомера, например из резины, с внутренними винтовыми зубьями, и эксцентрично расположенный внутри статора ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев обкладки, ходы винтовых зубьев обкладки и ротора пропорциональны их числам зубьев, торцовые профили обкладки и ротора образованы общим исходным контуром рейки со смещением, а профиль этого контура очерчен эквидистантой укороченной циклоиды, согласно изобретению, торцовый профиль зубьев обкладки из эластомера выполнен огибающим семейства окружностей радиуса rs в относительном движении систем координат Хос, Уос и Хс, Ус, при этом начало системы координат Хс, Ус расположено на центральной продольной оси обкладки, начало системы координат Хос, Уос смещено относительно центральной продольной оси обкладки на величину эксцентриситета aw между центральными продольными осями обкладки и ротора, а центр образующей окружности rs расположен на оси Хос на расстоянии Roc от начала системы координат Хос, Уос и определяется выражением:
Roc=rif+rs-aw,
где rif - радиус впадин зубьев обкладки, при этом углы поворота ψc, ϕос систем координат Хс, Ус и Хос, Уос относительно неподвижной системы координат X, У связаны соотношением:
ψc=ϕос(Zc+1)/Zc,
где Zc - число зубьев обкладки, а торцовый профиль зубьев ротора выполнен огибающим семейства профилей зубьев обкладки в относительном движении.
Кроме того, координаты Хс, Ус номинального профиля обкладки из эластомера определяются выражениями:
Хс=(Хосcosϕос-Уосsinϕос-aw)cosψc+(Хосsinϕос+Уосcosϕос)sinψc,
Ус=-(Хосcosϕос-Уосsinϕос-aw)sinψc+(Хосsinϕос+Уосcosϕос)cosψc.
Кроме того, радиус rs и величина эксцентриситета aw между центральными продольными осями обкладки из эластомера и ротора связаны соотношением:
rs=(0,618...4,999)аw.
Такое выполнение героторного винтового гидравлического двигателя обеспечивает большую, чем в известных конструкциях, площадь поперечного (живого) сечения, занятую рабочим телом при одинаковом контурном диаметре Dк (равном удвоенной величине rif радиуса впадин зубьев обкладки), величине эксцентриситета зацепления aw механизма, числах зубьев Zc (обкладки) и Zp (ротора), путем оптимизации величины радиуса rs образующей окружности.
Кроме того, выполнение героторного винтового гидравлического двигателя таким образом, что координаты Хс, Ус номинального профиля обкладки из эластомера определяются выражениями:
Хс=(Хосcosϕос-Уосsinϕос-aw)cosψc+(Хосsinϕос+Уосcosϕос)sinψc,
Ус=-(Хосcosϕос-Уосsinϕос-aw)sinψc+(Хосsinϕос+Уосcosϕос)cosψc,
при этом радиус rs и величина эксцентриситета аw между центральными продольными осями обкладки из эластомера и ротора связаны соотношением:
rs=(0,618...4,999)aw,
дополнительно уменьшает гидромеханические потери за счет равномерного натяга во всех фазах контакта зубьев обкладки и ротора, улучшения уплотнения по контактным линиям и снижения контактных нагрузок в зоне максимальных скоростей скольжения.
Ниже представлен лучший вариант героторного винтового гидравлического двигателя для бурения горизонтальных нефтяных скважин.
На фиг.1 показан продольный разрез героторного механизма винтового гидравлического двигателя.
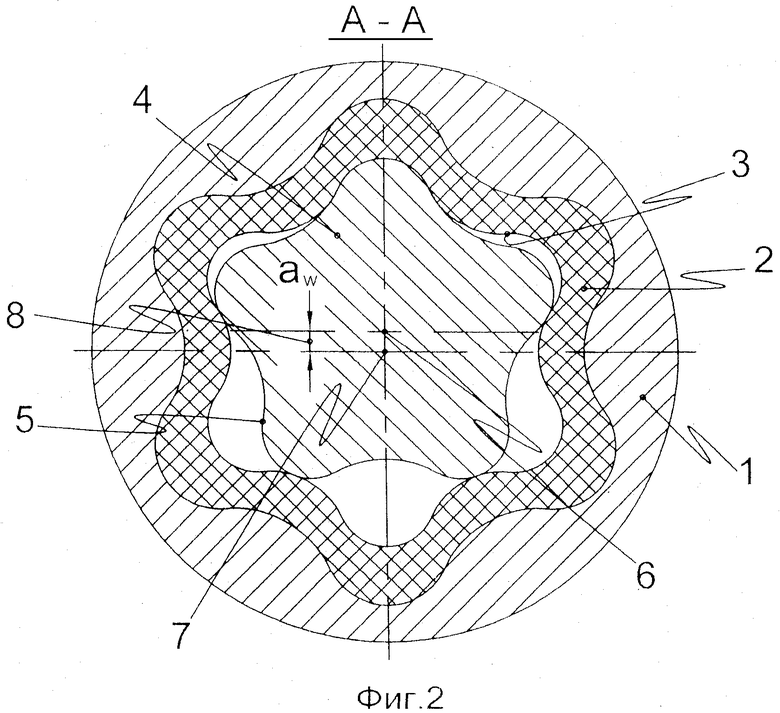
На фиг.2 показан разрез А-А на фиг.1 поперек статора и ротора винтового гидравлического двигателя, отношение чисел зубьев ротор-обкладка равно 5/6.
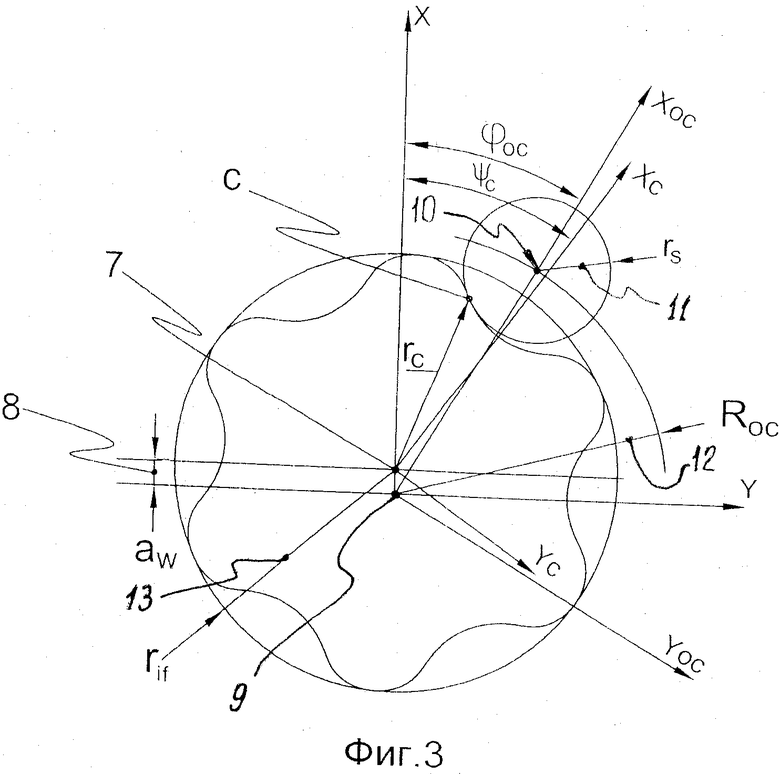
На фиг.3 показана схема образования торцового профиля зубьев в обкладке.
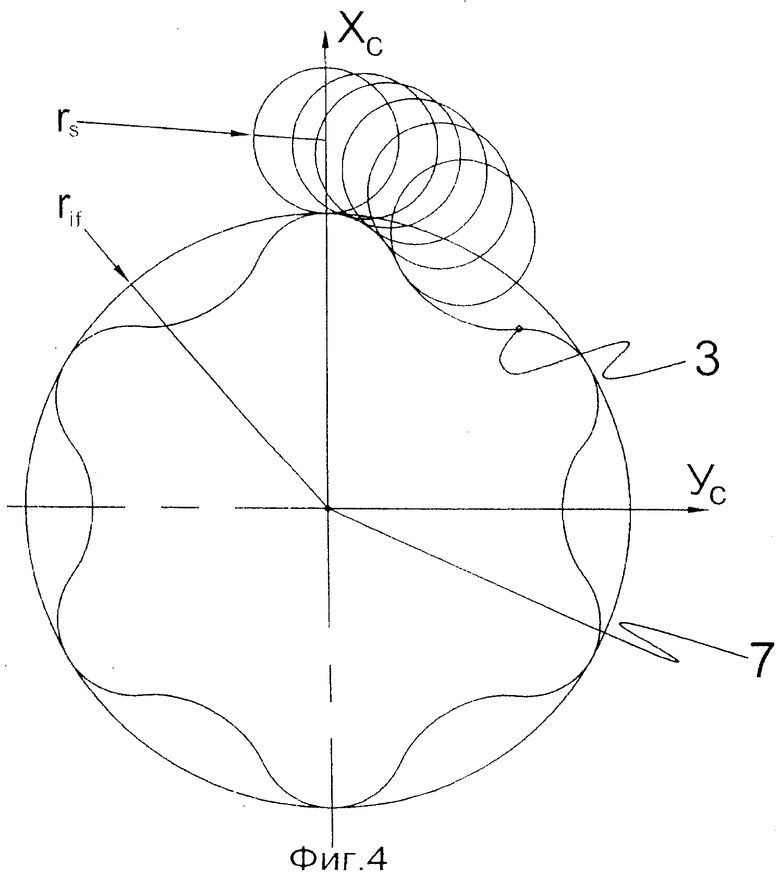
На фиг.4 показано образование торцового профиля зубьев в обкладке, который очерчен как огибающая кривая множества радиусов rs при повороте систем координат, показанных на фиг.3, при следующих значениях: rs=10,5 мм; aw=3,5 мм; rif=31,675 мм.
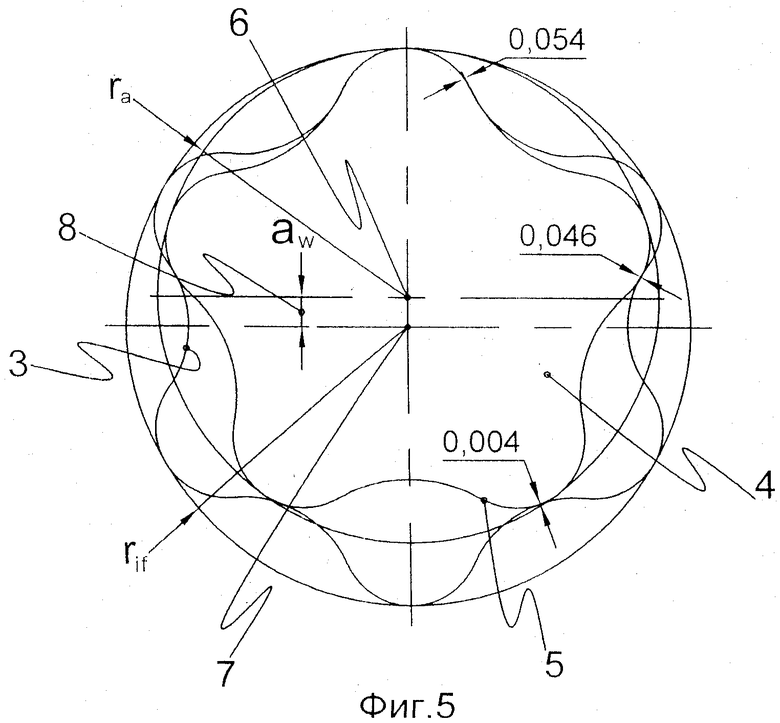
На фиг.5 показаны обкладка и ротор, рассчитанные по ОСТ 39-164-84:
Dk=2rif; rif=31,675 мм; Δh1n=0 (смещение исходного контура рейки для образования профиля зубьев обкладки); Δh2n=0,6125 мм (смещение исходного контура рейки для образования профиля зубьев ротора); S=587 мм2 - площадь поперечного сечения, занятая рабочим телом; цифры 0,054; 0,046 и 0,004 обозначают натяг в паре в мм при номинальных диаметрах впадин обкладки Dk=63,35 мм и диаметре ротора Da=56,35 мм.
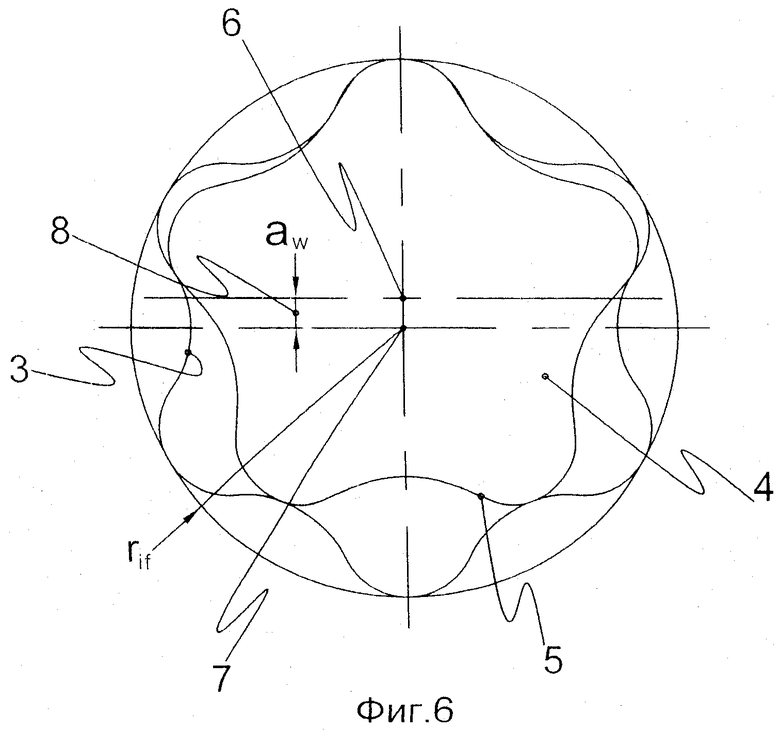
На фиг.6 показан пример выполнения героторного механизма винтового гидравлического двигателя при одинаковом контурном диаметре Dк: обкладка rif=31,675 мм от окружности rs=11,1 мм; ротор, огибающий обкладку, погрешностей в зацеплении нет; S=593 мм2 - площадь поперечного сечения, занятая рабочим телом.
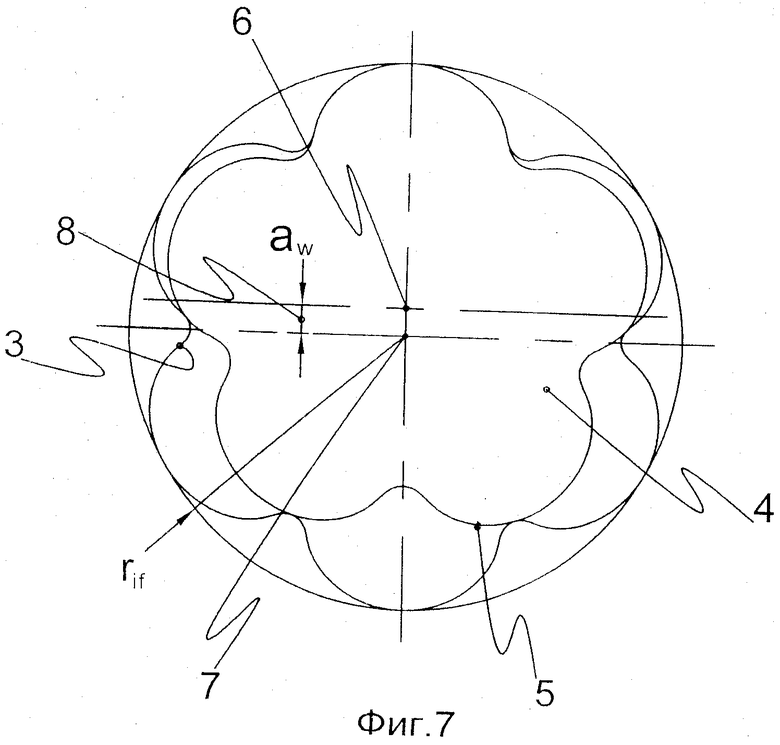
На фиг.7 показан пример выполнения героторного механизма винтового гидравлического двигателя при одинаковом контурном диаметре Dк: обкладка rif=31,675 мм от окружности rs=0,618; aw=2,163 мм; ротор, огибающий обкладку, погрешностей в зацеплении нет; S=615 мм2 - площадь поперечного сечения, занятая рабочим телом.
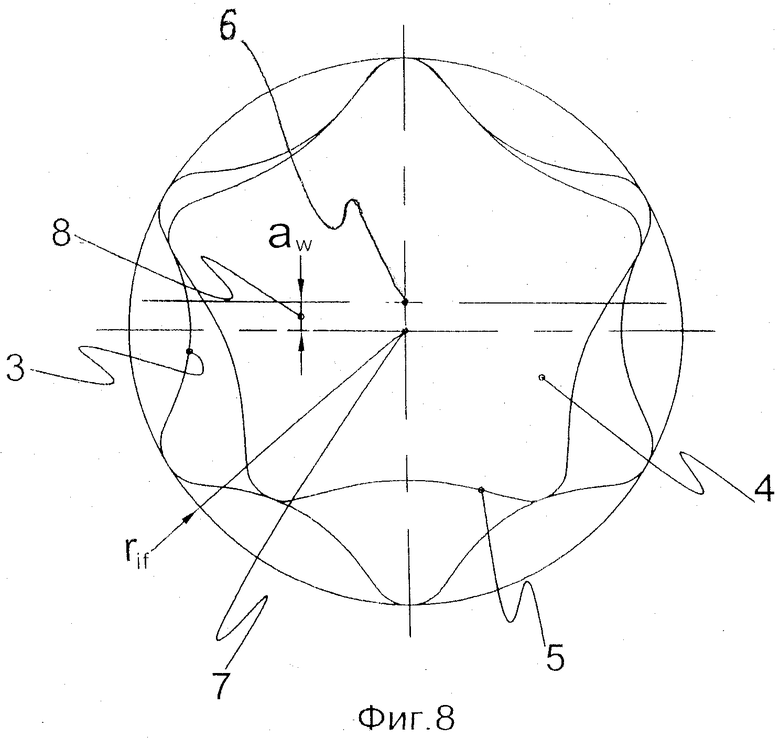
На фиг.8 показан пример выполнения героторного механизма винтового гидравлического двигателя при одинаковом контурном диаметре Dк: обкладка rif=31,675 мм от окружности rs=4,999; aw=17,5 мм; ротор, огибающий обкладку, погрешностей в зацеплении нет; S=592 мм2 - площадь поперечного сечения, занятая рабочим телом.
Героторный винтовой гидравлический двигатель содержит статор, представляющий собой трубчатый корпус 1, выполненный из стали 40Х ГОСТ 4543-71, с закрепленной в нем обкладкой 2 из эластомера, по существу, из резины ИРП-1226-5 ТУ 2512.003.45055793-98, с внутренними винтовыми зубьями 3, и расположенный внутри статора ротор 4, выполненный из стали 30Х13 ГОСТ 5949-75, с наружными винтовыми зубьями 5, число которых на единицу меньше числа зубьев 3 обкладки 2, ходы винтовых зубьев 3 обкладки 2 и винтовых зубьев 5 ротора 4 пропорциональны их числам зубьев (не показаны), а центральная продольная ось 6 ротора 4 и центральная продольная ось 7 обкладки 2 смещены между собой на величину эксцентриситета 8, показано на фиг.1, 2.
На фиг.3 показана схема образования торцового профиля зубьев 3 обкладки 2 из эластомера, где поз.9 обозначено начало системы координат Хос, Уос.
Существенными признаками героторного винтового гидравлического двигателя является то, что торцовый профиль зубьев 3 обкладки 2 из эластомера выполнен огибающим семейства окружностей радиуса rs в относительном движении систем координат Хос, Уос и Хс, Ус, при этом начало системы координат Хс, Ус расположено на центральной продольной оси 7 обкладки 2, начало 9 системы координат Хос, Уос смещено относительно центральной продольной оси 7 обкладки 2 на величину эксцентриситета 8, aw между центральной продольной осью 7 обкладки 2 и центральной продольной осью 6 ротора 4, а центр 10 образующей окружности 11, rs расположен на оси Хос на расстоянии 12, Roc от начала 9 системы координат Хос, Уос и определяется выражением:
Roc=rif+rs-aw,
где rif - радиус 13 впадин зубьев обкладки 2, показано на фиг.3.
При этом углы поворота ψc, ϕос систем координат Хс, Ус и Хос, Уос относительно неподвижной системы координат X, У связаны соотношением:
ψc=ϕос(Zc+1)/Zc,
где Zc - число зубьев обкладки 2, а торцовый профиль зубьев 5 ротора 4 выполнен огибающим семейства профилей зубьев 3 обкладки 2 в относительном движении, показано на фиг.2, 3, 4.
Существенными признаками героторного винтового гидравлического двигателя является также то, что координаты Хс, Ус номинального профиля обкладки 2 из эластомера определяются выражениями:
Хс=(Хосcosϕос-Уосsinϕос-aw)cosψc+(Хосsinϕос+Уосcosϕос)sinψc,
Ус=-(Хосcosϕос-Уосsinϕос-aw)sinψc+(Хосsinϕос+Уосcosϕос)cosψc,
при этом радиус 11, rs и величина эксцентриситета 8, aw между центральной продольной осью 7 обкладки 2 из эластомера и центральной продольной осью 6 ротора 4 связаны соотношением: rs=(0,618...4,999)aw, что дополнительно уменьшает гидромеханические потери за счет равномерного натяга во всех фазах контакта зубьев обкладки и ротора, улучшения уплотнения по контактным линиям и снижения контактных нагрузок в зоне максимальных скоростей скольжения, показано на фиг.2, 3.
На фиг.3, 4 показан пример профилирования точки "С" обкладки 2 трубчатого корпуса 1 от образующей окружности радиуса rs.
При проектировании задают:
rif - номинальный радиус окружности вершин детали с наружными зубьями (окружности впадин для детали с внутренними зубьями);
aw - межцентровое расстояние в паре;
Zc - число зубьев обкладки статора;
δ - натяг в паре ротор - обкладка статора.
Натяг в зацеплении получают, увеличив величину 13, rif в формулах для определения профиля ротора 4 на величину 5.
Героторный винтовой гидравлический двигатель работает следующим образом. Буровой раствор - глинистая жидкость с абразивными частицами, имеющая плотность до 1500 кг/м3, с содержанием до 1% песка, до 5% нефтепродуктов подается в верхнюю часть героторного винтового двигателя по колонне бурильных труб (не показаны).
Под действием перепада давления бурового раствора ротор 4 совершает планетарное движение внутри статора, обкатываясь винтовыми зубьями 5 по винтовым зубьям 3 обкладки 2 из эластомера, закрепленной в трубчатом корпусе 1, показано на фиг.1, 2.
При этом центральная продольная ось 6 ротора 4 совершает вращение вокруг центральной продольной оси 7 обкладки 2 из эластомера, закрепленной в трубчатом корпусе 1, по окружности радиуса аw, а сам ротор 4 поворачивается вокруг своей центральной продольной оси 6 в направлении, противоположном направлению планетарного движения, показано на фиг.2.
Героторный винтовой гидравлический двигатель для вращения ротора от насосной подачи текучей среды улучшает энергетические характеристики, по существу, развиваемую мощность и крутящий момент, путем обеспечения большей площади поперечного (живого) сечения, занятой рабочим телом, при одинаковом контурном диаметре, величине эксцентриситета зацепления механизма, числах зубьев обкладки и ротора, за счет оптимизации величины радиуса образующей окружности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321767C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2309237C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| МНОГОЗАХОДНЫЙ ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2194880C2 |
| ГИДРАВЛИЧЕСКИЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2710338C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2232317C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2202694C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2228444C1 |
Изобретение относится к героторным механизмам винтовых многозаходных гидравлических двигателей, вращение ротора с долотом в которых осуществляется насосной подачей текучей среды, для бурения нефтяных и газовых скважин. Героторный винтовой гидравлический двигатель содержит статор, представляющий собой трубчатый корпус с закрепленной в нем обкладкой из эластомера, например из резины, с внутренними винтовыми зубьями и эксцентрично расположенный внутри статора ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев обкладки, ходы винтовых зубьев обкладки и ротора пропорциональны их числам зубьев, торцовые профили обкладки и ротора образованы общим исходным контуром рейки со смещением, а профиль этого контура очерчен эквидистантой укороченной циклоиды. Приведены выражения и соотношения, улучшающие энергетические характеристики, по существу, развиваемую мощность и крутящий момент путем обеспечения большей площади поперечного сечения, занятой рабочим телом, при одинаковом контурном диаметре, величине эксцентриситета зацепления механизма, числах зубьев обкладки и ротора, за счет оптимизации величины радиуса образующей окружностей. 2 з.п. ф-лы, 8 ил.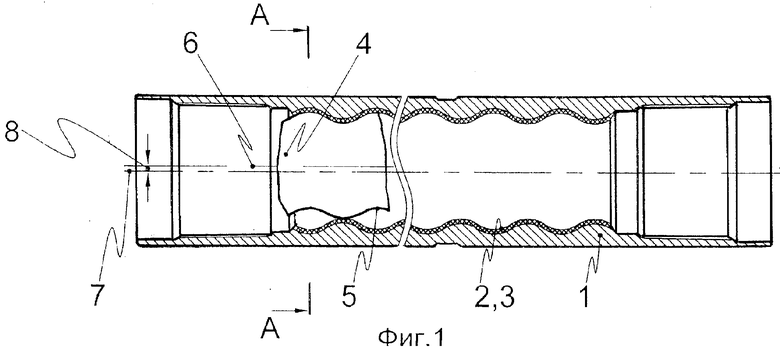
Roc=rif+rs-aw,
где rif - радиус впадин зубьев обкладки, при этом углы поворота ψс, ϕос систем координат Хс, Yc и Хос, Yoc относительно неподвижной системы координат X, Y связаны соотношением
ψс=ϕос(Zc+1)/Zc,
где Zc - число зубьев обкладки, а торцовый профиль зубьев ротора выполнен огибающим семейства профилей зубьев обкладки в относительном движении.
Xc=(Xoccosϕос-Yocsinϕос-aw)cosψс+(Xocsinϕос+Yoccosϕoc)sinψс,
Yс=-(Xoccosϕос-Yocsinϕос-aw)sinψс+(Xocsinϕос+Yoccosϕoc)cosψс.
rs=(0,618-4,999)aw.
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2232317C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| МНОГОЗАХОДНЫЙ ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2194880C2 |
| Внецентроидное гипоциклоидальное зацепление с внутренними профилями | 1950 |
|
SU93032A1 |
| US 3822972 A, 09.07.1974 | |||
| US 4922781 A, 08.05.1990. | |||

