Изобретение относится к технике строительства скважин, а именно - к героторным механизмам винтовых забойных двигателей для бурения нефтяных и газовых скважин, и может быть использовано в винтовых насосах для добычи нефти и перекачивания жидкостей, а также в винтовых гидромоторах общего назначения.
Известен героторный механизм внутреннего зацепления (патент СССР N 671463, опубл. 07.09.93 г. , Бюл. N 33 - 36), используемый в винтовых забойных двигателях. Указанный героторный механизм содержит ротор с наружными винтовыми зубьями и статор с внутренними винтовыми зубьями. Ось ротора смещена относительно оси статора на величину эксцентриситета. Разница в числах зубьев статора и ротора равна единице, а высота зубьев равна удвоенному эксцентриситету. Профили зубьев ротора и статора в торцевом сечении, перпендикулярном оси механизма, выполнены в виде огибающих общего исходного контура, который представляет собой эквидистанту укороченной циклоиды. Это позволяет упростить изготовление героторного механизма, так как роторы и статоры с разными числами зубьев образуются общим исходным контуром, и их изготовление осуществляют одной фрезой.
Недостатком известного героторного механизма является то, что он имеет ограниченную величину смещений исходного контура рейки, что не позволяет осуществлять коррегирование размера механизма (изменение диаметров статора и ротора), что ограничивает технические (энергетические) характеристики механизма.
Указанный недостаток частично устранен в героторном механизме винтовой забойной гидромашины (см. научно-технический журнал "Строительство нефтяных и газовых скважин на суше и на море", М., ВНИИОЭНГ, N 3-4 1997 г., стр. 41, рис. 2 и 3).
Героторный механизм винтовой забойной гидромашины содержит статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, металлический ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора. Винтовые зубья статора и ротора находятся в непрерывном контакте между собой. Ходы винтовых линий статора и ротора пропорциональны их числам зубьев. Ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев.
Профили зубьев статора и ротора в торцевом сечении выполнены как огибающие общего исходного контура циклоидальной рейки, очерченной эквидистантой укороченной циклоиды. При этом профиль зуба статора образуется при обкатывании инструментальной прямой рейки по станочной начальной окружности статора, радиус которой равен rw1 = rZ1,
где r - радиус катящейся окружности при образовании укороченной циклоиды;
Z1 - число зубьев статора,
со смещением рейки на величину Δh1. Профиль зуба ротора образуется при обкатывании инструментальной прямой той же рейки по станочной начальной окружности ротора, радиус которой равен rw2 = rZ2,
где Z2 - число зубьев ротора,
со смещением рейки на величину Δh2= Δh1-Δd/2,
где Δd - диаметральный натяг механизма.
Это позволяет увеличить наружный диаметр ротора для создания натяга по резине с целью уменьшения утечек рабочей жидкости и создания запаса на износ в рабочих органах (статоре и роторе) механизма, а также позволяет осуществлять коррегирование формы зубьев ротора и статора.
Однако, как показала практика, суммарный диаметральный натяг героторного механизма Δd распределяется по зубьям статора неравномерно. В выпукло-выпуклом контакте выступа зуба ротора с выступом эластичного зуба статора приведенный радиус кривизны профилей значительно меньше, чем в выпукло-вогнутом контакте выступа зуба ротора со впадиной зуба статора, в результате чего деформация выступа зуба статора значительно больше, чем деформация его впадины. Это означает, что происходит смещение оси ротора относительно расчетного положения в сторону уменьшения межосевого расстояния механизма (эксцентриситета ротора). В результате этого нарушается расчетная кинематика героторного механизма, увеличивается износ по вершинам зубьев ротора и статора, где, помимо повышенных контактных нагрузок от натяга, имеет место наибольшая скорость скольжения в связи с максимальной удаленностью этой зоны зацепления от мгновенного центра вращения ротора (от полюса зацепления).
Кроме того, уменьшение натяга в зоне полюса зацепления героторного механизма приводит к увеличению объемных утечек жидкости в этой зоне и к соответствующему снижению энергетических характеристик винтовой гидромашины.
Целью настоящего изобретения является устранение указанных недостатков известного героторного механизма винтовой забойной гидромашины, улучшение его энергетических характеристик, повышение износостойкости и долговечности за счет улучшения уплотнения по контактным линиям в зоне полюса зацепления и уменьшения контактных нагрузок в зоне максимальных скоростей скольжения.
Поставленная задача решается тем, что в известном героторном механизме винтовой забойной гидромашины, содержащем статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ходы винтовых линий статора и ротора пропорциональны их числам зубьев, ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, профиль зубьев статора в торцевом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой укороченной циклоиды с радиусом эквидистанты RC1, согласно изобретению, профиль зубьев ротора в торцевом сечении выполнен как огибающая другого исходного контура циклоидальной рейки, очерченной эквидистантой укороченной циклоиды, описанной выражениями
Xp2= rψ-Esinψ+RC2cosαp,
Yp2= -r+Ecosψ+RC2sinαp,
αp= arctg((r-Ecosψ)/Esinψ),
где Xр2, Yр2 - координаты профиля рейки ротора;
r - радиус катящейся окружности;
E - радиус образующей окружности, равный величине эксцентриситета;
RC2 - радиус эквидистанты рейки ротора;
ψ - текущий угловой параметр циклоиды;
αp - профильный угол рейки,
а радиус эквидистанты RC2 рейки ротора выполнен больше радиуса эквидистанты RC1 рейки статора.
Выполнение профиля зубьев ротора в торцевом сечении как огибающей другого исходного контура циклоидальной рейки с увеличенным радиусом эквидистанты RC2 по сравнению с радиусом эквидистанты циклоидальной рейки статора RC1 позволяет обеспечить увеличение радиуса выступа зуба ротора и получить в зацеплении боковой натяг, за счет которого улучшается уплотнение рабочих камер винтовой гидромашины в зоне полюса зацепления, где происходит разделение полостей высокого и низкого давления, повышаются энергетические характеристики героторного механизма.
Другим отличием героторного механизма является то, что радиус эквидистанты рейки ротора RC2 и радиус эквидистанты рейки статора RC1 связаны соотношением:
RC2 - RC1 = (0,1 - 0,5)E.
При выполнении указанного соотношения обеспечивается получение бокового натяга в оптимальных пределах.
При RC2 - RC1 < 0,1E эффект увеличения бокового натяга незначителен; если RC2 - RC1 > 0,5E, то боковой натяг становится чрезмерным, что приводит к снижению энергетических характеристик героторного механизма в результате увеличения механических потерь при деформировании эластичных зубьев статора.
Поставленная задача решается также тем вариантом, при котором в известном героторном механизме винтовой забойной гидромашины, содержащем статор с внутренними винтовыми зубьями, выполненными из упругоэластичного материала, например из резины, ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, причем ходы винтовых линий статора и ротора пропорциональны их числам зубьев, ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине радиальной высоты зубьев, профиль зубьев статора в торцевом сечении выполнен как огибающая исходного контура циклоидальной рейки, очерченной эквидистантой укороченной циклоиды с радиусом эквидистанты RC1, согласно изобретению, профиль зубьев ротора в торцевом сечении очерчен сопряженными дугами окружностей, профиль выступа зуба ротора очерчен дугой радиуса RB, а профиль впадины зуба ротора очерчен дугой радиуса
где Dр - наружный диаметр ротора по выступам зубьев,
причем радиус выступа зуба ротора RB выполнен больше радиуса эквидистанты рейки статора RC1.
Выполнение профиля зубьев ротора в торцевом сечении очерченным сопряженными дугами окружностей, причем профиль выступа зуба ротора очерчен дугой радиуса RB, профиль впадины зуба ротора очерчен дугой радиуса Rv, а радиус RB выполнен большим по сравнению с радиусом эквидистанты циклоидальной рейки статора RC1, позволяет обеспечить увеличение радиуса выступа зуба ротора и получить в зацеплении боковой натяг, за счет которого улучшается уплотнение рабочих камер винтовой гидромашины в зоне полюса зацепления, где происходит разделение полостей высокого и низкого давления, повышаются энергетические характеристики героторного механизма.
Кроме того, выполнение профиля впадины зуба ротора очерченным дугой радиуса Rv позволяет увеличить боковой натяг и в той фазе зацепления, когда выступ зуба статора контактирует со впадиной зуба ротора, что способствует дополнительному уплотнению рабочих камер героторного механизма.
Еще одним отличием героторного механизма является то, что радиус выступа зуба ротора RB и радиус эквидистанты рейки RC1 статора связаны соотношением
RB - RC1 = (0,1 - 0,5)E.
При выполнении указанного соотношения обеспечивается получение бокового натяга в оптимальных пределах.
При RB - RC1 < 0,1E эффект увеличения бокового натяга незначителен; если RB - RC1 > 0,5E, то боковой натяг становится чрезмерным, что приводит к снижению энергетических характеристик героторного механизма в результате увеличения механических потерь при деформировании эластичных зубьев статора.
На фиг. 1 показан общий вид героторного механизма винтовой забойной гидромашины в продольном разрезе;
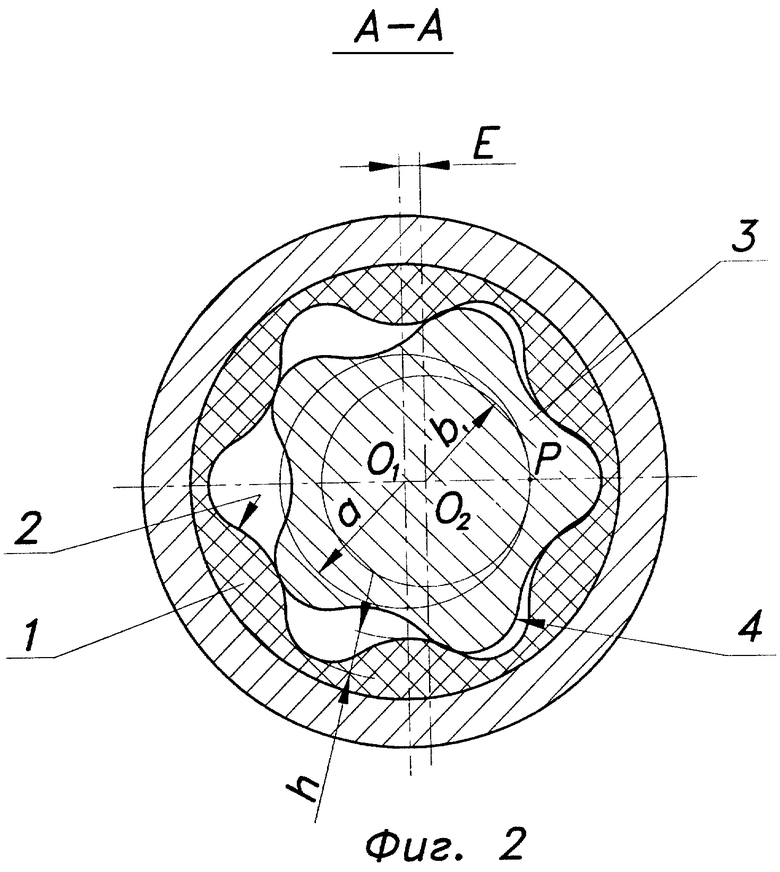
на фиг. 2 приведено поперечное сечение героторного механизма по линии А-А;
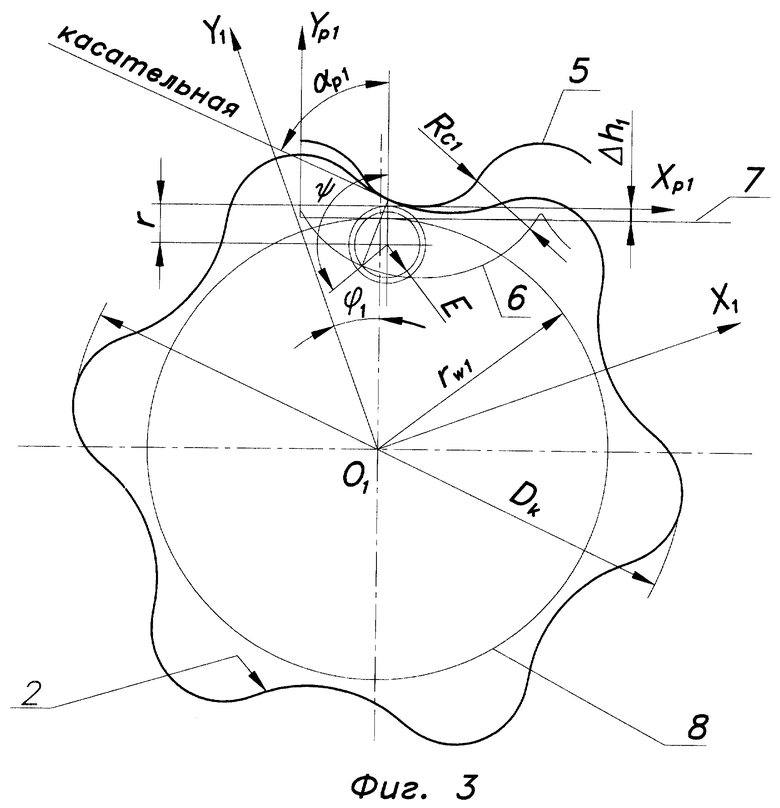
на фиг. 3 показано образование профиля статора героторного механизма от исходного контура циклоидальной рейки с радиусом эквидистанты RC1;
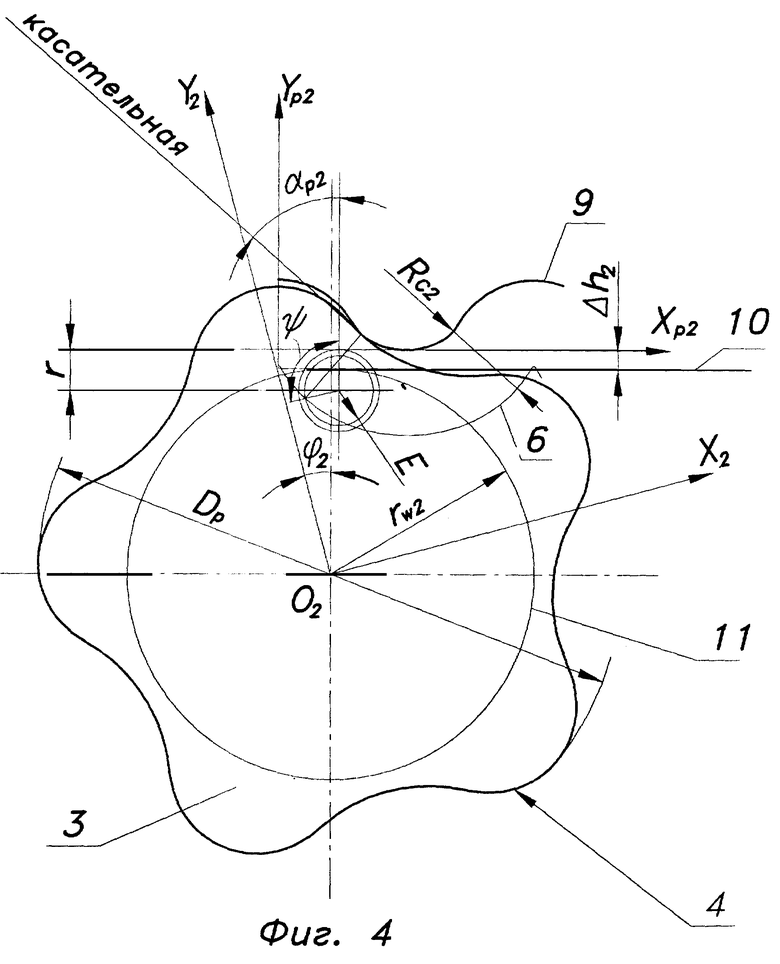
на фиг. 4 показано образование профиля ротора героторного механизма от исходного контура циклоидальной рейки с радиусом эквидистанты RC2;
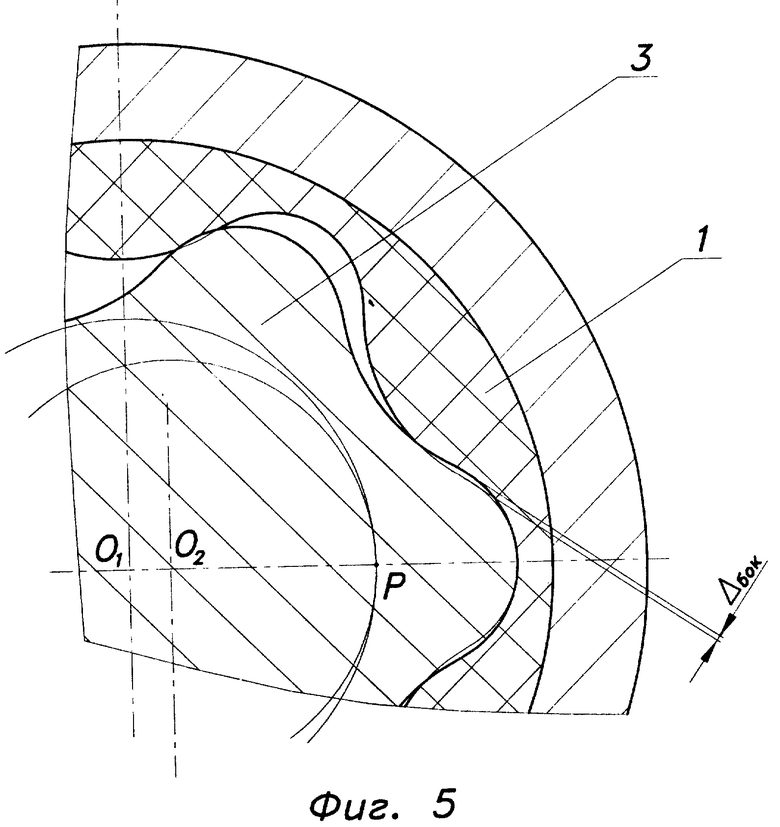
на фиг. 5 показана часть поперечного сечения героторного механизма по линии А-А в увеличенном масштабе;
на фиг. 6 показан вариант ротора героторного механизма винтовой гидромашины, профиль зубьев которого образован дугами окружности.
Героторный механизм винтовой забойной гидромашины (фиг. 1, 2) содержит статор 1 с внутренними винтовыми зубьями 2, ротор 3 с наружными винтовыми зубьями 4, число которых на единицу меньше числа внутренних винтовых зубьев 2 статора 1. Внутренние винтовые зубья 2 статора 1 выполнены из упругоэластичного материала, например из резины, привулканизованной к внутренней поверхности статора 2. Ось O1- O1 статора 1 смещена относительно оси O2- O2 ротора 3 на величину эксцентриситета E, равную половине радиальной высоты h зубьев 2 и 4. Рабочая центроида (начальная окружность) статора 1 радиусом a = EZ1 касается рабочей центроиды (начальной окружности) ротора 3 радиусом b = EZ2 в полюсе зацепления P (фиг. 2). Ходы винтовых линий T1 и T2 зубьев 2 и 4 соответственно статора 1 и ротора 3 пропорциональны их числам зубьев Z1 и Z2 (фиг. 1).
Профиль зубьев 2 статора 1 в торцевом сечении (фиг. 2, 3) выполнен как огибающая исходного контура циклоидальной рейки 5 статора 1, очерченной эквидистантой укороченной циклоиды 6; профиль циклоидальной рейки 5 статора 1 описывается выражениями
Xp1= rψ-Esinψ+RC1cosαp,
Yp1= -r+Ecosψ+RC1sinαp,
αp= arctg((r-Ecosψ)/Esinψ),
где Xр1, Yр1 - координаты профиля рейки статора;
r - радиус катящейся окружности;
E - радиус образующей окружности, равный величине эксцентриситета;
RC1 - радиус эквидистанты рейки статора;
ψ - текущий угловой параметр циклоиды;
αp - профильный угол рейки.
Профиль зубьев 2 статора 1 образуется при качении инструментальной прямой 7 исходного контура циклоидальной рейки 5 статора 1 по инструментальной окружности 8 статора 1, радиус которой равен rw1 = rZ1, со смещением исходного контура циклоидальной рейки 5 на величину Δh1 для выполнения диаметра DK статора 1 по впадинам зубьев 2 равным
DK= 2(r(Z1-1)+E+RC1+Δh1).
Торцевый профиль зубьев статора описывается выражениями:
X1= (Xp1+rw1+Δh1)cosΦ1-(Yp1+rw1Φ1)sinΦ1,
Y1= (Xp1+rw1+Δh1)sinΦ1-(Yp1+rw1Φ1)cosΦ1,
Φ1= (Yp1-(Xp1+Δh1)ctgαp)/rw1,
где Φ1 - угол поворота статора 1 при контакте с точкой исходного контура циклоидальной рейки 5, имеющей текущий угловой параметр ψ.
Профиль зубьев 4 ротора 3 в торцевом сечении (фиг. 2, 4) выполнен как огибающая другого исходного контура циклоидальной рейки 9 ротора 3, очерченной эквидистантой укороченной циклоиды 6; профиль циклоидальной рейки 9 ротора описывается выражениями:
Xp2= rψ-Esinψ+RC2cosαp,
Yp2= -r+Ecosψ+RC2sinαp,
αp= arctg((r-Ecosψ)/Esinψ),
где Xр2, Yр2 - координаты профиля рейки ротора;
r - радиус катящейся окружности;
E - радиус образующей окружности, равный величине эксцентриситета;
RC2 - радиус эквидистанты рейки ротора;
ψ - текущий угловой параметр циклоиды;
αp - профильный угол рейки.
Отличительной особенностью рейки 9 ротора 3 от рейки 5 статора 1 является величина радиуса эквидистанты RC2, который выполнен большим, чем радиус эквидистанты рейки статора RC1.
Оптимальным является выполнение соотношения RC2 - RC1 = (0,1 - 0,5)E. Профиль зубьев 4 ротора 3 образуется при качении инструментальной прямой 10 исходного контура циклоидальной рейки 9 ротора 3 по инструментальной окружности 11 ротора 3, радиус которой равен rw2 = rZ2, со смещением исходного контура циклоидальной рейки 9 на величину Δh2 для выполнения диаметра Dр ротора 3 по выступам зубьев 4 равным
Dp= 2(r(Z2-1)+E+RC2+Δh2).
Торцевой профиль зубьев ротора описывается выражениями
X2= (Xp2+rw2+Δh2)cosΦ2-(Yp2+rw2Φ2)sinΦ2,
Y2= (Xp2+rw2+Δh2)sinΦ2-(Yp2+rw2Φ2)cosΦ2,
Φ2= (Yp2-(Xp2+Δh2)ctgαp)/rw2.
где Φ2 - угол поворота ротора 3 при контакте с точкой исходного контура циклоидальной рейки 9, имеющей текущий угловой параметр ψ.
Выполнение профилей зубьев 2 статора 1 и зубьев 4 ротора 3 от разных исходных контуров циклоидальных реек 5 и 9, отличающихся величиной радиусов эквидистанты RC1 и RC2, позволяет выполнить выступ зуба 4 ротора 3 более полным, чем профиль впадины зуба 2 статора 1, за счет чего обеспечивается натяг Δбок по боковым сторонам профилей (фиг. 5), а не в диаметральном измерении. При этом изменение межосевого расстояния механизма уменьшается, улучшается уплотнение его рабочих камер, а наибольший натяг реализуется в зоне полюса зацепления P, где скорости скольжения зубьев 4 ротора 3 и зубьев 2 статора 1 минимальны. Такой же результат достигается в варианте героторного механизма винтовой забойной гидромашины (фиг. 1, 2), поперечное сечение ротора которого представлено на фиг. 6. Вариант предусматривает выполнение профиля зубьев 2 статора 1 от исходного контура циклоидальной рейки 5 (фиг. 3), описываемой выражениями
Xp1= rψ-Esinψ+RC1cosαp,
Yp1= -r+Ecosψ+RC1sinαp,
αp= arctg((r-Ecosψ)/Esinψ),
где Xр1, Yр1 - координаты профиля рейки статора;
r - радиус катящейся окружности;
E - радиус образующей окружности, равный величине эксцентриситета;
RC1 - радиус эквидистанты рейки статора;
ψ - текущий угловой параметр циклоиды;
αp - профильный угол рейки,
при качении инструментальной прямой 7 исходного контура циклоидальной рейки 5 статора 1 по инструментальной окружности 8 статора 1, радиус которой равен rw1 = rZ1, со смещением исходного контура циклоидальной рейки 5 на величину Δh1 для выполнения диаметра DK статора 1 по впадинам зубьев 2 равным
DK= 2(r(Z1-1)+E+RC1+Δh1).
Профиль зубьев 4 ротора 3 (фиг. 6) очерчен сопряженными дугами окружностей. Выступ зуба 4 ротора 3 очерчен дугой радиуса RB, величина которого больше радиуса эквидистанты рейки статора RC1, а центр OB дуги RB находится на расстоянии (Dр/2 - RB) от оси O2 ротора 3. Впадина зуба 4 ротора 3 очерчена дугой радиуса
центр которой Ov находится на расстоянии ((Dр/2 - 2E) - RB) от оси O2 ротора 3 и лежит на радиусе, повернутом относительно оси выступа зуба на угол 180o/Z2.
Оптимальным является выполнение соотношения RB - RC1 = (0,1 - 0,5)E.
Героторный механизм винтовой забойной гидромашины работает следующим образом.
При использовании героторного механизма в винтовом забойном двигателе промывочная жидкость подается в верхнюю часть героторного механизма по колонне бурильных труб (на фиг. не показаны). Под действием неуравновешенного давления промывочной жидкости ротор 3 совершает планетарное движение внутри статора 1, обкатываясь своими наружными винтовыми зубьями 4 по внутренним винтовым зубьям 2 статора 1 (фиг. 1, 2). При этом ось O2 ротора 3 совершает вращение относительно оси O1 статора 1 по окружности радиуса E против часовой стрелки, а сам ротор 3 поворачивается относительно своей оси O2 по часовой стрелке. Кинематически движение ротора 3 относительно статора 1 можно представить качением без скольжения центроиды ротора 3 радиусом b = EZ2 по центроиде статора 1 радиусом a = EZ1 с мгновенным центром вращения ротора 3, находящимся в точке касания центроид (полюсе зацепления) P. В зоне полюса зацепления P локализованы контактные линии (площадки), разделяющие полости высокого и низкого давления, поэтому боковой натяг, создаваемый в героторном механизме согласно настоящему изобретению, обеспечивает надежное уплотнение полостей высокого давления, что способствует снижению утечек жидкости и повышению энергетических характеристик забойного двигателя (КПД, мощность), что подтверждено стендовыми испытаниями. В результате того, что уменьшается изменение эксцентриситета ротора 3, обусловленное диаметральным натягом, обеспечивается уменьшение контактных нагрузок в зоне максимальных скоростей скольжения зубьев 4 ротора 3 по зубьям 2 статора 1 и соответствующее повышение долговечности и износостойкости героторного механизма. Планетарное вращение ротора 3 передается на вал опорного узла и связанный с ним породоразрушающий инструмент (на фиг. не показаны).
При использовании героторного механизма в винтовых насосах ротор 3 приводится во вращение и, обкатываясь по зубьям 2 статора 1, преобразует механическую энергию вращения в гидравлическую энергию потока жидкости. Кинематика движения ротора 3 винтового насоса и преимущества, получаемые при использовании предложенного героторного механизма, аналогичны описанным выше для винтового двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЗАХОДНЫЙ ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2194880C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2232317C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2202694C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2228444C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321767C1 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321768C1 |
| ШАРНИРНОЕ УСТРОЙСТВО | 2002 |
|
RU2235228C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
Изобретение относится к области строительства скважин, в частности к героторным механизмам винтовых забойных двигателей для бурения нефтяных и газовых скважин. Сущность изобретения: героторный механизм винтовой забойной гидромашины содержит статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа внутренних винтовых зубьев статора. Профиль зубьев статора в торцевом сечении выполнен как огибающая исходного контура циклоидальной рейки статора, очерченной эквидистантой укороченной циклоиды, а профиль зубьев ротора выполнен как огибающая другого исходного контура циклоидальной рейки ротора, очерченной эквидистантой укороченной циклоиды по определенным математическим выражениям. По другому варианту выполнения профиль зубьев ротора в торцевом сечении очерчен сопряженными дугами окружностей, причем профиль выступов и впадин зубьев ротора очерчен дугами радиусов, из которых одна задается, а профиль впадины зуба ротора очерчен дугой, радиус которой рассчитывается по приведенному математическому выражению. Изобретение обеспечивает улучшение энергетических характеристик, повышение износостойкости и долговечности героторного механизма винтовой забойной гидромашины. 2 с. и 2 з.п. ф-лы, 6 ил.
XP2 = rψ-Esinψ+RC2cosαP,
YP2 = -r+Ecosψ+RC2sinαP,
αP = arctg((r-Ecosψ)/Esinψ),
где Хр2, Yр2 - координаты профиля рейки ротора;
r - радиус катящейся окружности;
Е - радиус образующей окружности, равный величине эксцентриситета;
RC2 - радиус эквидистанты рейки ротора;
ψ - текущий угловой параметр циклоиды;
αP - профильный угол рейки,
а радиус эквидистанты RC2 рейки ротора выполнен больше радиуса эквидистанты RC1 рейки статора.
RC2 = RC1 + (0,1 - 0,5)E.
где Dр - наружный диаметр ротора по выступам зубьев;
Z2 - число зубьев ротора;
Е - эксцентриситет,
а радиус RB дуги выступа зуба ротора выполнен больше радиуса эквидистанты RC1 рейки статора.
RB = RC1 + (0,1 - 0,5)E.
| Строительство нефтяных и газовых скважин на суше и на море | |||
| - М.: ВНИИОЭНГ, 1997, № 3-4, с.41 | |||
| ЗАБОЙНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 0 |
|
SU237596A1 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 0 |
|
SU400689A1 |
| Забойный винтовой двигатель | 1979 |
|
SU926209A1 |
| Героторная машина | 1983 |
|
SU1384702A1 |
| Героторный забойный двигатель | 1991 |
|
SU1794176A3 |
| МНОГОШАГОВЫЙ ВИНТОВОЙ ДВИГАТЕЛЬ | 1994 |
|
RU2075589C1 |
| СПОСОБ ОПТИМИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ РАБОЧИХ ОРГАНОВ ОДНОВИНТОВОЙ ГИДРОМАШИНЫ | 1998 |
|
RU2150566C1 |
| ГУСМАН М.Т | |||
| и др | |||
| Забойные винтовые двигатели для бурения скважин | |||
| - М.: Недра, 1981, с.86-94 | |||
| БАЛДЕНКО Д.Ф | |||
| и др | |||
| Винтовые забойные двигатели | |||
| - М.: Недра, 1999, с.84-103. | |||

