Изобретение относится к сейсморазведке отраженными волнами и может быть применено при поиске и разведке полезных ископаемых на суше и акватории, а также в гидроакустике и акустической интроскопии.
Известен способ сейсмической разведки (метод широкого профиля), основанный на излучении зондирующего сигнала и многоканальном приеме отраженных волн от объектов, обработке с проведением селекции волн по направлениям прихода и отображением результатов в виде разрезов исследуемых параметров на плоттере [1]. В способе предусматривается поочередное возбуждение колебаний группой источников, расположенных на различных определенных расстояниях от линии разведочного профиля. При этом измерения относят к середине отрезков, соединяющих источник и отдельные геофоны приемной косы. Сопоставление данных позволяет оценить наклон отражающих границ путем фиксации отраженных волн с различных направлений. Точки измерений, по которым производится сопоставление, равномерно с шагом, определяемым скоростью буксировки, глубиной отражающей границы и частотой посылок, заполняют исследуемую полосу.
Недостатком способа является громоздкость приемоизлучающей установки, сложность контроля положения приемной косы и излучателей в пространстве. Кроме того, низка достоверность определений, искусственно относимых к дискретным точкам, что не позволяет однозначно определить положение дифрагирующих и рассеивающих объектов.
Известен способ сейсмической разведки, основанный на излучении зондирующего сигнала и многоканальном приеме отраженных и дифрагированных волн от объектов, обработке с проведением селекции волн по направлениям прихода и отображением исследуемых параметров на плоттере [2]. В способе предусматривается разновременное интерференционное суммирование исходных сейсмических записей. Для эффективного выполнения требуются сложные системы наблюдений с многократным перекрытием, с большим количеством приемных элементов и размерами расстановки, значительно превышающей длину волны зондирующего сигнала. Для получения результата одного цикла излучение-прием требуется многократное суммирование трасс в пределах заданного сектора обзора, т.е. на каждый угол выхода сейсмического сигнала необходимо отдельное суммирование всех элементов, составляющих приемную апертуру.
Недостатком способа является сложность проведения работ, низкая достоверность отображения информации, так как анализируются только определенные углы выхода сейсмического сигнала, количество которых ограничивается экономическими соображениями. В силу невозможности определить необходимые для анализа углы часть информации теряется, т.е. способ не является непрерывным по пространству исследования. Кроме того, за счет осреднения низка достоверность определения локальных скоростных характеристик среды.
Цель изобретения - повышение эффективности разведки путем упрощения измерений, повышения их точности и достоверности.
Цель достигается тем, что в способе сейсморазведки, заключающемся в возбуждении зондирующего сигнала и многоканальном приеме отраженных и дифрагированных волн от объектов, обработке с проведением селекции волн по направлениям прихода и отображением результатов в виде разрезов параметров на плоттере, регистрацию волн осуществляют по крайней мере тремя геофонами, расположенными по двум осям декартовой системы координат, и одним геофоном, расположенным в центре, совмещенном с излучателем зондирующего сигнала, для каждого цикла излучение-прием проводят корреляционную обработку с вычислением времени прихода волн от одноименных объектов и определяют условные координаты объекта отражения xI yI zI и скорость звука в среде из соотношений:
V = (1)
(1)
X′ =  (2)
(2)
Y′ =  =
=  (3)
(3)
Z′ =  (4) где V - скорость звука в среде;
(4) где V - скорость звука в среде;
а - расстояние от центра условной системы координат до каждого из трех геофонов, расположенных на ее осях;
Т1, Т2 - время прихода волны на геофоны, расположенные по оси Y;
Т3 - время прихода волны на геофон, расположенный по оси Х;
То - время прихода волны на геофон, расположенный в центре системы, координаты пересчитывают в абсолютные значения, связанные с участком работ, и запоминают совместно с данными о скорости звука, координатами центра приемоизлучающей установки, при этом при перемещении приемоизлучающей установки на определенный шаг цикл излучение - прием повторяют, амплитуды волн, зарегистрированных от объектов с одинаковыми абсолютными координатами, алгебраически суммируют и после завершения работ на участке выводят на плоттер в виде сечений параметров: амплитуд волн в координатах объектов отражения и локальных скоростей звука.
Существенность отличительных признаков способа от известных технических решений заключается в возможности за один цикл излучение-прием и минимальных вычислительных затратах получить практически непрерывную информацию в заданном секторе обзора о пространственном расположении объектов отражения и дифракции, а также скоростные характеристики среды по различным направлениям, так как три приемных геофона расположены на двух осях условной декартовой системы координат на одинаковом расстоянии от центра и один геофон, расположен в центре системы, совмещенной с излучателем зондирующего сигнала. При этом перевод координат в абсолютные координаты, связанные с участком работ, и накопление этой информации (при перемещении установки) совместно с данными о скоростях позволяют достоверно определить положение дифрагирующих объектов. С этой же целью производится алгебраическое суммирование амплитуд отражений.
Автору неизвестно использование отмеченных отличий в известных способах и устройствах.
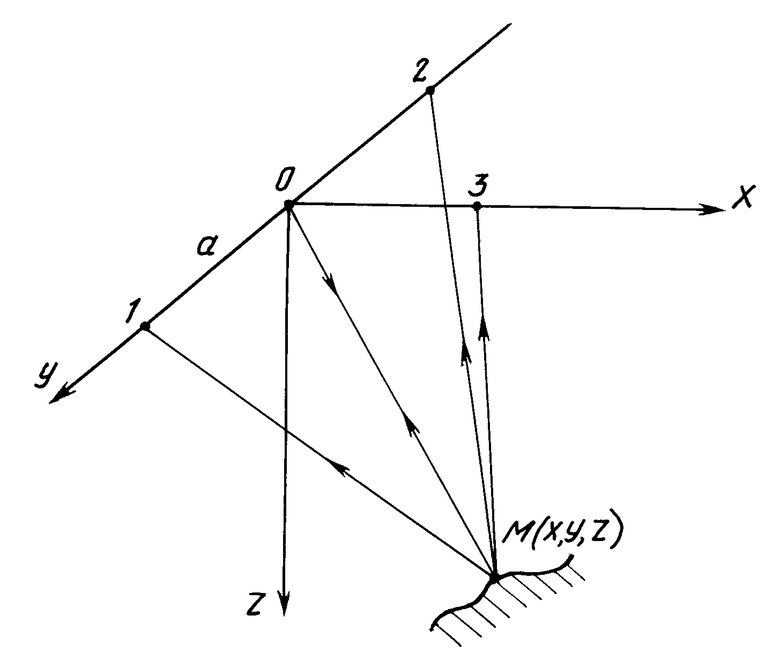
Способ поясняется чертежом.
На поверхности земли или акватории (при буксировке) располагают приемоизлучающую установку с четырьмя приемными геофонами. Установка содержит два геофона 1, 2, расположенные по одной оси Y условной системы координат, третий 3 на другой оси Х. Все геофоны располагаются от центра системы на расстоянии а. Излучатель и четвертый приемный геофон расположены в центре системы в т. 0. Ось Z направлена вниз. Величина а определяется, исходя из предполагаемого геологического строения участка работ, глубины целевых объектов и возможности уверенной корреляции волн. Как правило, а ≥ λ / 2 , где λ - длина волны зондирующего сигнала. В т. 0 условной системы координат производятся импульсное возбуждение колебаний в форме видео- или радиоимпульса и регистрация отраженных сигналов четырьмя геофонами. Посредством корреляционной отработки определяют время прихода отраженных сигналов То, Т1, Т2, Т3 в т. 0, 1, 2, 3 от одноименных объектов и рассчитывают скорость звука в среде V и условные координаты отражающих объектов и объектов дифракции по формулам (1), (2), (3), (4). При этом расчет скорости и последующее использование его значения в расчетах (2), (3), (4) не являются обязательными, так как при использовании справочных данных о скорости существенно положение границ не изменится. В процессе регистрации фиксируются не только объекты с эффективным радиусом, соизмеримым с размером 1 зоны Френеля, но и дифрагирующие и рассеивающие. Амплитуды двух последних значительно меньше. Координаты X, Y, Z пересчитываются в абсолютные, связанные с участком работ. При этом при выборе в качестве абсолютной системы координат участка также декартовой ΣI (х, y, z), осуществляется параллельный перенос координат центра установки Σ...(Х, Y, Z) так, что:
x = X - a, y = Y - b, z = Z - c (5) где a, b, c - смещение центра координат участка работ относительно центра приемоизлучающей установки, а затем далее поворот, используя соотношения:
xI = l1x + m1y + nI z; yI= l2x + m2y + n2z;
zI = l3x + m3y + nz3 , (6) где li, mi, ni, (i = 1, 2, 3) - направляющие косинусы между осями декартовых систем координат.
Координаты хI , yI , zI запоминают совместно с данными скорости и координатами центра приемоизлучающей установки. При изменении положения установки производится повторное измерение То, Т1, Т2, Т3, расчет скоростей и координат с последующим переводом в абсолютные. При совпадении координат отражающих объектов с предыдущими измерениями производится алгебраическое суммирование амплитуд сигналов, что обеспечивает накопление информации от дифрагирующих объектов. По мере проведения работ или по их завершении на плоттер по заданным сечениям выводят амплитудную информацию в координатах отражающих объектов и, при необходимости, с учетом кооpдинат центpа пpиемоизлучающей установки скоpостные хаpактеристики среды. При этом с последними данными может быть проведена углубленная томографическая обработка для локализации зон изменения скорости звука.
П р и м е р 1. Сейсмические работы проводятся в зоне развития многолетнемерзлых пород, представленных суглинками и песками. Пески образуют изометричные линзы, характеризующиеся повышенными скоростями упругих волн и затуханием. Задача исследований: картирование песчано-глинистых отложений по уровню кровли песчаных линз (глубины 200-300 м) с оценкой однородности суглинистых отложений. Целевым объектом обнаружения являются линзы песков (радиус 3-5 м). Их уверенное картирование практически полностью решает поставленную задачу. В распоряжении партии имеется вибратор с максимальной частотой 200 Гц ( λ= 10 м). Принимая размер "а" = 5 м отметим, что при регистрации волнового поля будут широко наблюдаться дифрагированные волны, так как длина волны и размеры целевых объектов соизмеримы и меньше длины волны.
Устанавливаем приемоизлучающую установку на линию профиля в зависимости от уровня микросейсм проводим необходимое количество циклов излучение-прием. Осредненные трассы фильтруем для выделения полезных отражений. На данном этапе суммарная трасса на одном из геофонов представляет собой сумму отраженных сигналов вида:
bof (t - τo) + b1f(t-τ1 )...bnf(t- τn ) =
= F(t) (7) где f(t) - зондирующий импульс (отрезок синусоиды);
bo...bn - амплитуды отраженных сигналов;
τo.... τn - задержки прихода отраженных сигналов на отдельный геофон;
τo - нулевая задержка, τn - задержка, равная продолжительности регистрируемой трассы;
τn. . .τn-1 - единичная задержка - есть интервал между отсчетами аналого-цифрового преобразователя (АЦП).
Z - преобразование уравнения (7) выглядит следующим образом:
f(z)[boz + b1z...bnz] = F(z) (8) = b0+b1z ... bnz
= b0+b1z ... bnz
(9)
Проводя операцию цифровой фильтрации с известным сигналом f(t), получим последовательность амплитуд отраженных сигналов bo, b1...,bn в виде единичных отсчетов, сдвинутых по оси времени относительно τo... на τ1 .... τn Аналогичная обработка проводится с остальными приемными каналами. Корреляционное выделение отражений, соответствующих одноименным отражающим объектам, проводится с четырьмя (по количеству геофонов) последовательностями bo, b1, . . .bn. При этом в опытном порядке может быть введен определенный порог ограничения по амплитуде, ниже которого корреляционная обработка не проводится. Критерием достоверного выделения объекта отражения является присутствие отсчетов одинаковой амплитуды на четырех трассах в заданном секторе обзора (временном окне заданной величины). При удовлетворении этим требованиям с четырех трасс считывается информация о То, Т1, Т2, Т3 и производится расчет по соотношениям (1)-(4). Не меняя расположения установки, просматриваем разрез, например, в мультиплексном режиме, по горизонтальным (или вертикальным) сечениям в пределах зоны, определяемой направленностью излучателя. Выбираем оптимальные режимы возбуждения колебаний: амплитуда, частота, длительность посылки, и приема, размер а, усиление, фильтрация; оцениваем разрешающую способность. После выбора оптимальных режимов, используя абсолютные значения координат участка работ ΣI (х, y, z), согласно соотношениям (5), (6) пересчитываем координаты объектов отражения в абсолютные хI , yI, zI и запоминаем информацию с параллельным ее отображением на плоттере (цветном дисплее), например, в вертикальном сечении. При этом амплитуды фиксируются методом переменной плотности в соответствии с положением объектов в пространстве. Одновременно может быть выведена информация о скоростях звука в виде линий различного цвета, соединяющих объекты отражения с центрами приемоизлучающей установки. После завершения вычислений следует переход на следующую точку, где процедура повторяется (уже с оптимально выбранным режимом и параметрами). Информация об одноименных (совпадающих в пространстве) объектах накапливается по мере проведения работ как на плоттере в заданном сечении, так и в памяти регистрирующей системы. Если фиксируется факт совпадения координат объектов при различных положениях приемоизлучающей установки (в пределах задаваемой зоны осреднения Δх, Δ y Δ z), амплитуды волн алгебраически суммируются, что способствует более надежной фиксации дифрагирующих и рассеивающих объектов.
По мере отработки участка на плоттере наблюдаем процесс отображения геологического строения. Яркими участками отмечаются зоны зеркального отражения. Рассеивающие и дифрагирующие объекты - редкими малоамплитудными знаками отображения, концентрирующимися как вокруг зеркальных объектов, так и изолированно. Флюктуации скорости звука в среде несут информацию о составе и льдистости многолетнемерзлых пород.
По завершении работ информация выводится по различным сечениям или в трехмерном изображении. Значения скорости звука, учитывая различные пересекающиеся направления определений, могут быть использованы для углубленной томографической обработки как дополнительная информация о положении локальных зон экстремальных значений.
П р и м е р 2. Работы проводятся на акватории. Цель: картирование заиленных объектов диаметром 1-2 м с их классификацией на глубинах 20-50 м. Мощность ила 5-7 м. В качестве зондирующего сигнала выбираем многокомпонентный радиоимпульс (например, являющийся суммой сфазированных отрезков синусоид с частотами fo, f1...fn с низшей частотой 10 кГц. Излучение производим излучателем с максимально широкой диаграммой направленности с целью освещения наибольшей области пространства. Размер а выбираем равным = 7,5 см
= 7,5 см
Шаг квантования АЦП определяется верхней частотой зондирующего сигнала; при f = 100 кГц. τn τn-1 = 0,01-0,05 мкс. Опытным путем выбираем уровень порога ограничения (минимальный уровень коэффициентов bo,...bn) для высшей частоты зондирующего сигнала. Проводим корреляционную обработку между четырьмя приемными каналами и выделяем наборы коэффициентов bo...bn для каждого отражающего объекта по каждой частоте зондирующего сигнала, что дает амплитудно-частотную характеристику объекта отражения, используемую в дальнейшем для классификации. Производится расчет V, X, Y, Z, исходя из Т0, Т1, Т2, Т3по осредненному набору частот или по каждой. Затем вводятся абсолютные координаты приемоизлучающей установки, координаты X, Y, Z пересчитываются в абсолютные хI, yI, zI и запоминаются совместно с данными скорости, координатами центра установки. По мере продвижения плавсредства осуществляется вывод информации на плоттер по сечениям (или по сечениям в мультиплексном режиме) или трехмерном представлении. Аномальные изменения скорости звука являются дополнительной информацией о нахождении объекта в слое ила, так как вызваны приходом на геофоны (гидрофоны) отраженно-преломленных волн.
Положительный эффект от применения способа состоит в увеличении эффективности разведки за счет повышения достоверности отображения геологического строения, определения локальных скоростных характеристик среды, а также упрощения производства полевых наблюдений и уменьшения количества обрабатывающих процедур.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО ЗОНДИРОВАНИЯ ЗЕМНОЙ КОРЫ С ИСПОЛЬЗОВАНИЕМ НОРМИРОВАННЫХ ИСТОЧНИКОВ ПОЛЯ | 1996 |
|
RU2093863C1 |
| УНИФИЦИРОВАННЫЙ ГЕНЕРАТОРНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС КРАЙНЕ НИЗКИХ И СВЕРХНИЗКИХ ЧАСТОТ ДЛЯ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ | 2000 |
|
RU2188439C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714519C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ МОРСКОЙ СЕЙСМОРАЗВЕДКИ | 2012 |
|
RU2502091C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
Изобретение: в сейсморазведке отраженными волнами на суше и акватории, а также в гидроакустике и акустической интроскопии. Сущность изобретения: регистрацию волн осуществляют по крайней мере четырьмя геофонами. При этом три из них расположены по двум осям X , Y декартовой системы на расстоянии A от ее центра. Четвертый геофон размещают в центре системы, совмещенном с излучателем зондирующего сигнала. Условные координаты объекта отражения определяют, исходя из времени прихода волн на геофоны, расположкнные по осям X , Y , и расстояния A , по полученным состояниям. Далее координаты пересчитывают в абсолютные значения. Амплитуды волн от объектов с одинаковыми координатами алгебраически суммируют. Совместно с локальными скоростями распространения волн их выводят на плоттер в виде сечений параметров. 1 ил.
СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ, заключающийся в возбуждении зондирующего сигнала и многоканальном приеме отраженных и дифрагированных волн от объектов, обработке с проведением селекции волн по направлениям прихода и отображением результатов в виде разрезов параметров на плоттере, отличающийся тем, что регистрацию волн осуществляют приемной установкой, включающей по крайней мере три геофона, расположенных по двум осям X, Y декартовой системы координат и симметрично относительно геофона, расположенного в центре приемной установки, совмещенном с точкой размещения излучателя зондирующего сигнала, для каждого цикла излучение - прием на участке работ проводят корреляционную обработку с вычислением времени прихода волн от одноименных объектов разведки и определяют условные координаты X', Y', Z' объекта отражения и скорость V звука в среде из соотношений

где a - расстояние от центра приемной установки до каждого из трех геофонов;
T1, T2 - время прихода волны на геофоны, расположенные по оси Y;
T3 - время прихода волны на геофон, расположенный по оси X;
T0 - время прихода волны на геофон, расположенный в центре системы,
полученные условные координаты пересчитывают в их абсолютные значения, связанные с участком работ, и запоминают совместно с данными о скорости звука, координатами центра приемной установки, при этом при перемещении последней на определенный шаг, цикл излучение - прием повторяют, амплитуды волн, зарегистрированных от объектов с одинаковыми абсолютными координатами, алгебраически суммируют, а после завершения работ на участке на плоттер выводят сечения амплитуд волн в координатах объектов отражения и локальных скоростей звука.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Справочник геофизика | |||
| Сейсморазведка | |||
| Под ред | |||
| В.П.Номоконова | |||
| М.: Недра, 1990, с.306-307. | |||
