Изобретение относится к измерительной технике, в частности копределению местоположения огнестрельной пушки на местности и определению траектории полета пущенного с ее помощью снаряда.
Из существующего уровня техники известна «Система обнаружения огня «Сова»» [1]. Кроме того, известны способы определения координат положения в пространстве и во времени пуль и снарядов, например патенты №2470252, 2231738, 2392577 ... - [2, 3, 4, 5, 6].
Наиболее близким к заявленному техническому решению является патент RU 2358275, G01S 3/808. Способ и система определения траектории сверхзвукового снаряда. Публикация РСТ: 2006/096208 (14.09.2006) - [2].
Недостатками данного технического решения являются:
- итерационный характер вычислительного процесса, требующий большого времени на решение задачи;
- большое количество датчиков звука, снижающее общую надежность системы;
- малая точность вычислений;
- отсутствие определения точки падения снаряда.
Задачей данного предложения является высокоточное определение параметров движения снаряда по траектории, такие как высота полета, скорость полета, угол наклона траектории к горизонту, определение аналитического описания траектории движения с привязкой его к земным координатам и точки падения снаряда.
Решение поставленной задачи достигается тем, что она решается в два этапа. На первом этапе определяется точка пуска снаряда методами сейсмологии. На втором этапе методами нескольких акустических измерений определяются высоты полета снаряда, уточняется скорость движения снаряда, определяется угол наклона траектории к горизонту, корректируется точка пуска, определенная на первом этапе, формируется аналитическое описание траектории снаряда, привязанное к земным координатам, определяется точка падения снаряда.
Отличительными признаками от прототипа является то, что определение параметров полета снаряда ведется не по ударной волне, а по звуку, сопровождающему сверхзвуковой полет снаряда, выделение в сопровождающем звуке базовых точек для определения времени распространения волны до датчиков, линейное расположение датчиков приема как сейсмических волн, так и акустических, расчет динамических параметров траектории полета, оценка координат точки падения снаряда, определение точки пуска по сейсмической волне.
Анализ предлагаемого решения и прототипа позволяет сделать вывод о его соответствии условиям патентоспособности.
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг. 1 представлена картина распространения упругой волны по поверхности Земли. Сейсмоволна распространяется из точки О и достигает в разное время датчиков.
На фигуре обозначено: НС - направление стрельбы, точка О - точка местонахождения пушки, точки А, В, С - точки местонахождения сейсмоприемников, привязанные к координатам земной поверхности, d0 - расстояние от точки А до пушки, угол САО - угол между направлением на пушку и прямой АС.
На фиг. 2 представлены геометрические построения для расчета точки пуска снаряда в географической системе координат (этап 1) и определения координат траектории снаряда (этап 2).
Фиг. 3 представляет звуковую волну, сопровождающую полет сверхзвукового 152-миллиметрового снаряда и определение максимальных амплитудных значений.
На фиг. 4 представлены геометрические построения для определения дальности до источника звука, высоты траектории и азимута точки траектории относительно прямой АС акустическим методом (этап 2).
Фиг. 5 дает геометрическую картину расчета угла наклона траектории и параметров траектории полета снаряда для двух расчетных точек.
На фиг. 6 представлена структурная схема комплекса аппаратуры для определения параметров траектории снаряда.
Работает устройство по данному способу следующим образом.
На первом этапе измерений определяется точка выстрела, то есть местонахождение пушки с использованием сейсмологии.
На втором этапе измерений определяются параметры траектории снаряда и скорость полета снаряда. Эти два этапа вместе позволяют определить направленность выстрела и точку приземления снаряда (место поражения) и, таким образом, заранее, например, по радиосвязи предупредить личный состав военнослужащих о принятии надлежащих мер.
Рассмотрим первый этап - определение места выстрела пушки. Данная задача решается с использованием сейсмоволн, распространяющихся от точки выстрела.
Известно, что при выстреле происходит жесткий удар по земной коре, в результате которого возникает упругая волна, распространяющаяся по поверхности Земли с некоторой постоянной для данной местности скоростью по всем направлениям. Эта скорость зависит от типа поверхностного слоя (например, песок или скальная порода) и в среднем равна 1500 метров в секунду. Как видим, средняя скорость упругой волны много больше скорости снаряда, так что одновременно с определением координат местонахождения пушки, приблизительно определяется момент прихода звука от пролетающего снаряда к акустическим датчикам. Это необходимо, например, для своевременного включения аппаратуры и внимательной обработки полученной в это время акустической информации.
1-й этап заключается в определении местоположения пушки по сейсмоволне от выстрела. Для начала измерений необходимо расставить три сейсмоприемника относительно возможного местоположения пушки. Расположим сейсмоприемники в горизонтальной плоскости на одной прямой на расстоянии 1-5 километров от возможного расположения пушки и желательно под углом 45 градусов к направлению на местоположение пушки, как показано на фиг. 1. Расстояния между датчиками могут быть от единиц метров до сотен метров.
Время прихода фронта упругой волны к сейсмодатчикам определим с использованием сейсмоприемников и центральной ЭВМ, как показано на фиг. 6, минуя микроконтроллеры. Согласно данной структурной схеме сигналы каждого датчика сразу передаются центральной ЭВМ, а та фиксирует время прихода упругой волны к соответствующим датчикам. Далее информация обрабатывается согласно алгоритму, описанному в данной работе.
Пусть имеем скорость распространения упругой волны, равную ν. Эта скорость определяется в основном типом грунта, заполняющего данную местность, и должна быть известной к моменту измерений. Необходимо определить направление на точку О - угол χ0 и расстояние OA=d0. Таким образом, для нахождения двух неизвестных нужно составить два уравнения. Согласно рисунку упругая сейсмоволна приходит в некоторые моменты времени как в точку А, так и в точки В и С. Время прихода волны к датчикам фиксируется, и по ним формируются разности: t1=tB-tA, t2=tC-tA. Время прихода сейсмической волны к датчику А будем считать за базовое.
Для формирования расчетных уравнений рассмотрим два косоугольных треугольника ОАВ и ОАС - фиг. 1. Воспользуемся формулой (теоремой косинусов):
a 2=b2+c2-2*b*c*cosχ,
где сторона а расположена напротив угла χ.
Для нашего случая имеем:
 ,
,
где первое уравнение справедливо для треугольника ОАВ, второе - для ОАС.
Эта система двух уравнений содержит два неизвестных параметра: угол χ0 и расстояние ОА=d0.
В свою очередь, сторона OB=b+ν*Δt1, и ОС=d+ν*Δt2;
где Δt1=tB-tA, Δt2=tC-tA, OA=d0,
где представленные разности составлены на основе измерения моментов прихода упругой волны к соответствующим датчикам. С учетом приведенных соотношений запишем:

Здесь обозначено АВ=a, ВС=b, a и b - заранее известные расстояния между датчиками. Индекс "0" у переменных соответствует первому этапу измерений.
Раскроем скобки и упростим выражение, получим:

Если обозначить
a 1=2*ν*Δt1,
a 2=2*ν*Δt2,
b1=2*a,
b2=2*(a+b),
c1=a2-(ν*Δt1)2,
c2=(a+b)2+(ν+Δt2)2,
то имеем:
Это система двух уравнений с двумя неизвестными. Обозначим
d0=x1, d*cosχ0=x2;
тогда:
 .
.
Для определения двух переменных - угла χ0 и расстояния d0 надо решить представленную систему уравнений для конкретных значений ν, известных a и b, измеренных Δt1, Δt2.
После определения величин d0 и χ0 легко определить координаты точки выстрела. Для этого достаточно отложить угол χ0 из точки А, т.е. отложить угол САО, а на луче АО отложить расстояние d0. В географической системе координат точку местоположения пушки можно найти следующим образом.
Согласно фиг. 2 для системы датчиков известен угол наклона прямой АС к линии экватора - угол γ. Азимутальный угол (угол между направлением на Север (NA) и направлением на точку местонахождения пушки, угол NAC) будет равен χ+γ-90. Расстояние по X будет равно: X=d0*sin(χ+γ-90)+XA, а расстояние Y=d0*cos(χ0-γ-90)+YA. По этим координатам легко найти местоположение точки выстрела пушки.
Второй этап. На этом этапе определяются координаты траектории пролетающего над данной местностью снаряда: угол наклона траектории полета снаряда, скорость пролетающего снаряда, координаты местонахождения пушки, которые дублируют эти же координаты, найденные по сейсмоволне. При этом звуковые волны - это дозвуковые волны, сопровождающие полет снаряда.
По данным, найденным на данном этапе в сочетании с определенными ранее координатами местонахождения пушки, может быть определена точка падения снаряда, и координаты этой точки могут быть переданы военнослужащим обстреливаемой территории для принятия соответствующих мер. Запас времени для принятия соответствующих мер может составлять 15-25 секунд.
В основе определения параметров траектории движения снаряда лежит способ определения расстояния и угла азимута на точку движения снаряда с помощью акустического метода. Известно, что снаряд калибра 150 мм летит с начальной сверхзвуковой скоростью порядка 900 метров в секунду. Вблизи точки выстрела (1…10 километров) эта скорость остается сверхзвуковой, При полете снаряда он издает звуковые волны, воспринимаемые человеческим ухом. Звуковые волны движутся вслед за ударной волной снаряда. Эти звуковые волны и могут быть параметром для определения траектории полета снаряда. Звуковые волны легко фиксируются звуковыми микрофонами. Воспользуемся теми же точками, что были использованы при сейсмоизмерениях и поместим в них датчики звука, причем три из них поместим в горизонтальной плоскости на одной линии (это ранее определенные точки с датчиками А, В, С; при этом, если приемники сейсмоволн располагаются на некоторой глубине в Земле, то акустические датчики располагаются над Землей) и один датчик D поместим над датчиком А на вертикали на некоторой высоте 2…5 метров. Где-то рядом расположим микроконтроллер, соединим датчики с микроконтроллером и центральной ЭВМ линиями электрической связи. В процессе измерений важно определить расстояния до снаряда, азимутальные углы с тем, чтобы определить координаты траектории и скорость полета в географической системе координат. При знании точки пуска, располагая параметрами траектории снаряда, легко определить направление полета и примерную точку падения снаряда.
Возникает вопрос определения точки фиксации звука из череды звуковых волн, издаваемых летящим снарядом. Предлагается организовать поиск максимальных значений звуковых колебаний и именно эти точки считать моментами исхода звуковой волны, опорными точками для системы навигации.
Для реализации этого пусть каждый микрофон имеет свой микроконтроллер, обрабатывающий только сигналы, поступающие в его канал (фиг. 6). Пусть эти микроконтроллеры работают от одного задающего генератора тактовых импульсов. Задача каждого микроконтроллера заключается в том, чтобы принять аналоговый сигнал и с высокой степенью дискретности перевести в цифровой код. Расчеты должны вестись в реальном масштабе времени, то есть в ритме звуковой волны, приходящей от снаряда. Поиск максимального значения гармоник может быть организован, например, таким образом. Поступающая на микроконтроллер гармоника разбивается на последовательность дискретных значений. Рядом стоящие дискреты сравниваются по амплитуде без учета знака. При этом сравниваемые амплитуды могут быть как положительными, так и отрицательными. Первую поступившую на вход микроконтроллера дискрету назовем предыдущей (t=i+1), а следующую за ней - последующей (t=i) (фиг. 3). В случае если в сравнении компаратором двух рядом стоящих дискрет последующая больше предыдущей, имеет место уменьшение величины гармоники. В случае если последующая дискрета равна по модулю предыдущей или становится больше ее, можно констатировать, что имеет место прохождения максимума. В этом случае микроконтроллер должен послать сигнал центральной ЭВМ о достижении максимума на данном датчике. Время определения максимальных значений должно фиксироваться. Разности появления максимальных значений на соответствующих датчиках относительно базового датчика будут участвовать при расчетах параметров траектории.
Разместим датчики звука в тех же точках, что и сейсмоприемники, то есть в точках А, В, С, но над Землей. Напомним, что расположение датчиков звука должно удовлетворять следующим условиям: они должны располагаться вдоль одной прямой и в горизонтальной плоскости. Кроме того, разместим четвертый датчик звука над точкой А (базовой точкой) на некоторой высоте (2-3 метра) на вертикали этой точки.
Для формирования расчетных уравнений рассмотрим два косоугольных треугольника O1AB и O1AC (фиг. 4). Точка О1 - это точка траектории полета снаряда, параметры которой должны определяться. Воспользуемся формулой (теоремой косинусов):
a 2=b2+c2*b*c*cosχ1,
где сторона a расположена напротив угла χ1, угла САО1.
Расчеты аналогичны расчетам первого этапа (по сейсмоволнам).
Для нашего случая имеем:
 ,
,
где первое уравнение справедливо для треугольника ОАВ, второе - для ОАС.
Эта система двух уравнений содержит два неизвестных параметра: угол χ1 и расстояние ОА=d1.
В свою очередь, сторона OB=d1+ϑ*δt1 и ОС=d1+ϑ*δt2;
где δt1=tB-tA, δt2=tC-tA, ϑ - скорость звука,
где представленные разности составлены на основе измерения моментов прихода упругой волны к соответствующим датчикам. С учетом приведенных соотношений, запишем:

Здесь обозначено АВ=a, ВС=b, a и b - заранее известные расстояния между датчиками.
Раскроем скобки и упростим выражение, получим:

Если обозначить
a 1=2*ϑ*Δt1,
a 2=2*ϑ*Δt2,
b1=2*a,
b2=2*(a+b),
c1=a2-(ν*Δt1)2,
c2=(a+b)2-(ν+Δt2)2,
то имеем:
 ,
,
Это система двух уравнений с двумя неизвестными. Обозначим
d1=x1, d1*cosχ1=x2;
тогда:
Для определения двух переменных - угла χ1 и расстояния d1 (равного отрезку АО1) надо решить представленную систему уравнений для конкретных значений ϑ, известных a и b, измеренных δt1, δt2.
После определения величин d1 и χ1 можно определить координаты точки траектории в географической системе координат.
Акустический датчик в точке D позволит определить угол возвышения точки О траектории над горизонтом - угол h.
Рассмотрим треугольник О1АD (фиг. 4).
Из рисунка видно, что звуковой сигнал придет в первую очередь к датчику D, а затем уже к датчику А. При знании расстояния до точки О1, это расстояние было определено, это d1, можно определить и угол O1AO=β.
Из треугольника O1AD видно, что
DO1=d1-δt3*ϑ
Для нахождения угла β воспользуемся теоремой косинусов для треугольника АО1D:
O1D2=d2+l2-2*d*l*cosβ, откуда 
Далее найдем угол возвышения траектории h относительно горизонта: h=90-β.
Из треугольника O1АМ1 тогда можно найти и высоту траектории O1M1 и расстояние AM1:
O1M1=O1A*sinh, AM1=O1A*cosh.
Найдем привязку найденных параметров полета снаряда с географическими координатами. Для этого необходимо определить географические координаты точки М.
Рассмотрим треугольник АСО1. Согласно теореме косинусов имеем:
 .
.
Найдем длину стороны
 .
.
Из прямоугольного треугольника O1CM1 имеем
 .
.
В косоугольном треугольнике AM1C известны три стороны. Воспользовавшись теоремой косинусов можно найти угол при вершине А:
MC2=AC2+AM2-2*AM*AC*cosA, откуда:
угол А=-arccos(МС2-АС2-АМ2)/2*АС*АМ
Найдя угол при вершине А, можно найти азимутальный угол точки М относительно известных координат точки А: XA, YA:
∠Aист=∠CAN-∠A,
где ∠Аист - азимут точки М1 относительно точки А.
Угол CAN - угол междупрямой АС и направлением на Север.
Тогда координаты точки М1 могут быть найдены:
Y1=AM1*cos Аист+YA, X1=AM1*cos Аист+XA,
где XA и YA - географические координаты точки А.
Проведя второе акустическое измерение (аналогичное первому), будем иметь координаты второй точки траектории - X2, Y2. По двум точкам земной поверхности можно провести прямую - проекцию траектории полета снаряда на поверхности Земли в виде уравнения прямой:
Y=k*X+Y1,
где k=(Y2-Y1)/(X2-X1).
Отложив на этой прямой дальность полета снаряда, получим точку падения снаряда: XK, YK. Координаты конечной точки полета снаряда и уравнение прямой траектории могут быть сообщены заинтересованным лицам, военным и гражданским, чтобы они приняли соответствующие меры.
Согласно фиг. 5 после второго измерения можно уточнить значения скорости полета снаряда и угол наклона траектории. Имеем:
O2K=O2M2-О1М1, тогда tgα=O2K/O1K, α=arctgO2K/O1K
Уточнение скорости полета снаряда ϑсн может быть проведено, если будет известно время между двух последовательных измерений Δt12:
С учетом понижения траектории снаряда со временем приведенные выражения позволяют самостоятельно определить точку пуска снаряда, то есть уточнить координаты пушки, найденные ранее с помощью сейсмоприемников.
Найденные в работе параметры движения снаряда позволяют уточнить точку падения путем моделирования или определить эту точку напрямую, по таблицам стрельбы.
В качестве передаваемой по радио информации может быть рассчитанная точка падения и уравнение прямой, соответствующей траектории полета снаряда.
Рассмотренная система определения параметров траектории сверхзвукового снаряда может быть смонтирована на автомобиле и оперативно выдвигаться для проведения измерений. Передача информации может быть организована на определенной частоте радиоканала и может быть автоматизирована.
Литература
1. Джерелейко Р. Система обнаружения огня «Сова». Военная техника, 2011.
2. Патент РФ №2358275, G01S 3/808. Способ и система определения траектории сверхзвукового снаряда. Бартер Джеймс И. - US, Миллиган Стивен Д. - US, Бринн Маршалл Сет - US, Муллен Ричард Дж. - US. Публикация РСТ: WO 2006/096208 (14.09.2006).
3. Патент РФ №2516205, F41J. Способ определения координат точки падения боеприпаса. Козирацкий Ю.Л., Кулешов П.Е., Чернухо И.И. Дата публикации Четверг, Октябрь 10, 2013 года.
4. Патент №2470252, F41J. Способ определения координат положения в пространстве и во времени пуль и снарядов. Близнюк A.M., Кочнев Ю.В., Хорощко А.Н. Дата публикации Четверг, Декабрь 20, 2012 года.
5. Патент №2231738, F41J. Способ определения внешнебаллистических характеристик полета пуль и снарядов. Дата публикации: Вторник, Февраль 10, 2010 года.
6. Патент №2392577, F41J. Устройство определения внешнебаллистических параметров на основе акустических датчиков. Афанасьева Н.Ю. и др. Дата публикации: Среда, Январь 27, 2010 года.
7. Красильников В.А. Звуковые и ультразвуковые волны в воздухе, воде и твердых телах. - М.: Государственное издательство физико-математической литературы, 1960.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА | 2015 |
|
RU2610908C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА ПРИ ДВИЖЕНИИ ОБЪЕКТА ОБСТРЕЛА | 2018 |
|
RU2704955C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ НА ОСНОВЕ АКУСТИЧЕСКИХ ДАТЧИКОВ | 2008 |
|
RU2392577C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ | 2006 |
|
RU2315939C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| СПОСОБ КАЛИБРОВКИ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ДАТЧИКОВ В СИСТЕМЕ ОБНАРУЖЕНИЯ ВЫСТРЕЛА | 2005 |
|
RU2347234C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2358275C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛЕТА ПУЛЬ И СНАРЯДОВ | 2002 |
|
RU2231738C2 |
Изобретение относится к измерительной технике, в частности к определению местоположения огнестрельной пушки на местности и определению параметров траектории полета пущенного с ее помощью снаряда. Предложен способ, по которому датчики звука ориентируют под углом к направлению местонахождения пушки. Посредством вычислительной машины обрабатывают полученную с датчиков информацию. При этом параметры траектории снаряда определяются в два этапа. На первом этапе определяют точку пуска снаряда сейсмологическими методами. На втором этапе определяют параметры траектории акустическими методами. На первом этапе вдоль одной прямой в горизонтальной плоскости на известных расстояниях располагают три сейсмоприемника, которые используют в качестве датчиков сейсмической волны. На втором этапе вдоль прямой в горизонтальной плоскости на известных расстояниях располагают три датчика звука. Четвертый датчик звука располагают на вертикали одного из трех датчиков, взятого за базовый. Параметры сейсмической волны на первом этапе и звуковой волны на втором этапе измеряют, используя разности времени прихода волн к датчикам относительно базового датчика. На втором этапе используют выделенные микроконтроллером и компаратором максимальные значения гармоник звуковой волны с учетом известных скоростей распространения сейсмических и звуковых волн. На основании известных расстояний между датчиками и зарегистрированным временем достижения волнами датчиков составляют уравнения. Решения уравнений позволяют найти параметры для первого этапа - координаты пушки, а для второго этапа - параметры траектории снаряда относительно Земли. Обеспечивается высокоточное определение параметров движения снаряда по траектории и точки падения снаряда. 6 ил.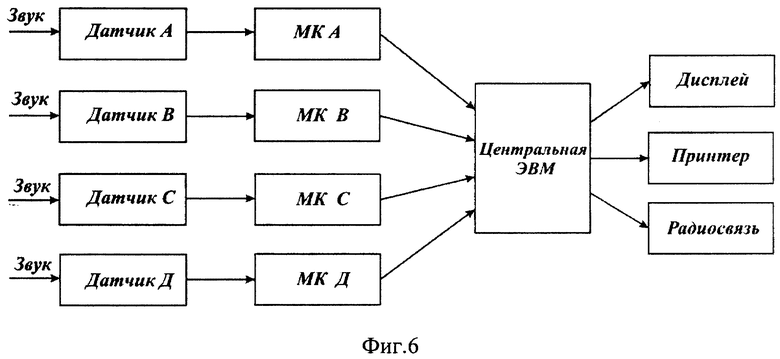
Способ определения траектории полета сверхзвукового снаряда, включающего датчики звука, ориентированные под углом к направлению местонахождения пушки, и вычислительную машину, обрабатывающую полученную с датчиков информацию, отличающийся тем, что параметры траектории снаряда определяются в два этапа, на первом из которых определяется точка пуска снаряда сейсмологическими методами, а на втором - определение параметров траектории ведется акустическими методами, при этом на первом этапе в качестве датчиков сейсмической волны используются три сейсмоприемника, расположенные вдоль одной прямой в горизонтальной плоскости на известных расстояниях, а на втором - четыре датчика звука, три из которых расположены вдоль прямой в горизонтальной плоскости также на известных расстояниях, а четвертый располагается на вертикали одного из трех датчиков, взятого за базовый, в качестве измеренных параметров как в одном, так и в другом случаях используются разности времени прихода волн к датчикам относительно базового датчика, при этом на втором этапе используются выделенные микроконтроллером и компаратором максимальные значения гармоник звуковой волны, далее с учетом знания скоростей распространения сейсмических и звуковых волн, знания расстояний между датчиками и времени достижения волнами датчиков составляются уравнения, решение которых позволяют найти параметры для первого этапа - координаты пушки, а для второго этапа - параметры траектории снаряда относительно Земли.
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2358275C2 |
| RU 2007110536 A, 10.10.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |

