Изобретение относится к нефтедобывающей и газовой промышленности, в частности к устройствам для измерения и регистрации параметров при спускоподъемных операциях (СПО) в процессе подземного и капитального ремонта скважин.
Известно устройство для автоматического замера веса и длины труб при спускоподъемных операциях в скважине, содержащее барабан лебедки с кинематической передачей, датчик импульсов, соединенный с блоком счетчиков, блок питания, датчик силы натяжения гибкого элемента, узел подготовки и запоминания информации /Авторское свидетельство 1550119, 1990, МКИ Е 21 В 47/04/.
Недостатком устройства является его сложность, а следовательно, и ненадежность из-за большого числа механических элементов, а также низкая точность измерения и регистрации параметров СПО.
Наиболее близким к изобретению является весовое устройство к грузоподъемникам, содержащее датчик усилия, индикатор веса, выполненный в виде табло, устройство перегрузки, усилитель, накопитель, таймер, блок питания, искробезопасный блок и контроллер (Свидетельство на полезную модель 3825 от 14.03.1995, МПК 6 G 01 G 19/14, бюл. 3 от 16.03.1997).
Недостатком этого устройства является его низкая точность измерения веса из-за влияния температуры и влажности окружающей среды на датчик, канат, талевый блок, смазку и т.п.
Сущность изобретения направлена на создание устройства, позволяющего повысить точность измерения веса, а следовательно, точность определения аварийной ситуации, надежность и безопасность работы при СПО.
Технический результат заключается в выявлении сигнала помехи и исключении его из измеряемого сигнала, что позволит увеличить точность измерения нагрузки на крюке грузоподъемника.
Данный технический результат достигается тем, что в известное весовое устройство дополнительно введен амплитудный детектор, а в качестве датчика усилия использован силоизмерительный блок, состоящий из датчика силы натяжения каната и электрического преобразователя, и взаимосвязь амплитудного детектора с силоизмерительным блоком и контроллером позволяет значительно повысить точность измерения.
На чертеже представлена блок-схема устройства для грузоподъемника.
Устройство состоит из силоизмерительного блока 1, который соединен через искробезопасный блок 2 с входом амплитудного детектора 3 и с первым входом контроллера 4, второй вход контроллера соединен с выходом амплитудного детектора 3, выход блока управления 5 соединен со входом контроллера 4, вход-выход контроллера 4 - с блоком памяти 6, а первый выход - с блоком предельных значений 7, второй - через искробезопасный блок 2 с табло 8, третий выход контроллера 4 соединен с управляющим входом амплитудного детектора 3, блок питания 9 обеспечивает необходимыми напряжениями питания все блоки устройства.
Силоизмерительный блок 1 состоит из датчика силы и электрического преобразователя. Устанавливается он на неподвижном гибком органе подъемника. Датчик силы представляет собой упругий элемент с установленными на нем тензореристорами и предназначен для преобразования натяжения гибкого органа в электрический сигнал. Электрический преобразователь предназначен для получения на выходе силоизмерительного блока 1 электрического сигнала удобного для передачи его и обработки. Таким образом, на выходе силоизмерительного блока 1 получаем нормированный по ГОСТу сигнал в виде тока, напряжения, частоты и т.п.
Искробезопасный блок 2 предназначен для исключения опасности взрыва, пожара при работе устройства в местах наличия взрывоопасной среды. Блок выполнен на резисторах, ограничивающих ток в цепях питания датчиков и выносного табло до взрывобезопасных значений. Номиналы резисторов выбирают в соответствии с ГОСТ 22782.5. Блок ограничен на плате контуром, который после монтажа заливается компаундом.
Амплитудный детектор 3 (см. кн. А.Г.Алексенко и др. Применение прецизионных аналоговых микросхем, - М.: Радио и связь, 1985. С. 170) предназначен для запоминания экстремальных значений входного сигнала. При изменении входного сигнала он отслеживается и при увеличении амплитудный детектор переходит в режим хранения и запоминает предыдущее минимальное значение входного сигнала. Это значение удерживается на выходе детектора либо до появления меньшего сигнала на входе, либо по команде сброса к исходному состоянию.
Контроллер 4 выполнен на базе однокристальной микроЭВМ типа 80С51 фирмы Intel и предназначен для сбора информации, ее преобразования и формирования управляющих воздействий по программе, заложенной в его перепрограммируемое запоминающее устройство (ППЗУ).
Блок памяти 6 предназначен для накопления информации о параметрах СПО и регистрации ее в реальном масштабе времени, а также передачи ее на компьютер через переносный блок памяти, проводную или беспроводную связь.
Табло 8 предназначено для индикации параметров СПО, например нагрузки на крюке подъемника, число нагружений и т.п. Табло представляет собой блок, выполненный на базе светодиодных индикаторов, в виде строки и/или знакосинтезирующих индикаторов.
Устройство работает следующим образом. Основные технологические параметры СПО (подъем трубы с мостков, состыковка ее с колонной труб, свинчивание труб и опускание колонны труб в скважину) регистрируются в предлагаемом устройстве в реальном масштабе времени и в случае аварийной ситуации или для анализа могут быть в любой момент (по требованию оператора) воспроизведены. Как видим, процесс СПО имеет циклический характер, т.е. имеются промежутки времени, при которых нагрузка на крюке подъемника равна нулю. Подъемники эксплуатируются в сложных климатических условиях, например, температура окружающей среды изменяется от минус 50 градусов до плюс 60 градусов, влажность достигает 90-100%, нефть, грязь и т.п. Все это приводит к значительным изменениям (погрешностям) измерения нагрузки на крюке подъемника из-за изменения сил трения в талевой системе, изменения гибкости каната, изменения вязкости смазки, изменения выходного сигнала с силоизмерительного блока, линий связи и т.п. Таким образом, в моменты времени, когда измеряемая нагрузка на крюке равна нулю, на выходе силоизмерительного блока будет находиться сигнал с учетом влияния в настоящий момент факторов, приводящих к погрешности измерения нагрузки на крюке. Следовательно, так как СПО является циклическим процессом, в этом случае регулярно имеется информация о минимальной нагрузке (помехе), которую нужно каждый раз принимать за нуль, т.е. вычитать ее.
Нормированный сигнал с силоизмерительного блока 1, пропорциональный усилию на крюке подъемника, через искробезопасный блок 2, ограничивающий токи в цепях датчика до взрывобезопасных значений, поступает на амплитудный детектор 3, который следит за минимальным значением сигнала в течение циклов СПО, а также в контроллер 4. Микропроцессорный контроллер 4 содержит центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), устройство управления и синхронизации (УУС), оперативное запоминающее устройство (ОЗУ). Контроллер 4 производит преобразование сигнала, поступающего с силоизмерительного блока и амплитудного детектора в цифровой код для дальнейшей обработки с периодичностью, задаваемой устройством управления и синхронизации контроллера 4. В контроллере 4 осуществляется вычитание из цифрового кода, пропорционального сигналу с силоизмерительного блока 1, цифрового кода, пропорционального сигналу с амплитудного детектора 3. Полученный таким образом цифровой код, наиболее точно характеризующий величину нагрузки на крюк, поступает в блок памяти 6, где регистрируется в реальном масштабе времени. Контроллер 4 в каждом цикле вырабатывает сигнал, который подается через выход 3 на управляющий вход амплитудного детектора. По этому сигналу амплитудный детектор приходит в состояние для запоминания нового минимального значения входного сигнала. Цифровой код, полученный в результате вычитания, сравнивается с цифровым кодом максимального усилия для данного подъемника, устанавливаемого при помощи блока управления 5. При равенстве этих кодов контроллер 4 вырабатывает сигнал для управления блоком 7 предельных значений, который формирует сигнал для включения сигнализации. Электронный таймер контроллера 4 формирует сигнал реального времени. Значение реального времени переписывается по запросу контроллера 4 в блок памяти 6 и хранится там вместе со значениями нагрузок на крюке. Цифровое значение кода нагрузки с контроллера 4 через искробезопасный блок 2 пересылается на табло 8 и отображается в виде цифрового значения и/или световой линии. Табло 8 установлено непосредственно в зоне выполнения работ и выполнено в герметичном закрытом корпусе. Информация с блока памяти 6 поступает в ЭВМ, установленную на диспетчерском пункте или в кабинете руководителя, при помощи НОТЕБУКа, переносного блока памяти, проводной или беспроводной линии связи. ЭВМ по заданной программе обрабатывает информацию с целью создания баз данных о работе подъемника или отображения работы в реальном масштабе времени, построения гистограмм нагрузок и т.д.
Таким образом, вычитая из общего сигнала (нагрузка на крюке плюс помеха плюс нагрузка от крюкоблока и т.п), минимальный сигнал за цикл, тем самым повышаем точность измерения нагрузки на крюке при СПО, а следовательно, и безопасность работы на подъемнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ | 2002 |
|
RU2209307C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ В СКВАЖИНЕ | 2001 |
|
RU2211921C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ СПУСКА ОБЪЕКТА ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ В СКВАЖИНЕ | 1999 |
|
RU2168624C1 |
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2002 |
|
RU2204815C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТНО-СИЛОВЫХ ХАРАКТЕРИСТИК ЧЕЛОВЕКА | 2002 |
|
RU2218962C1 |
| ДАТЧИК НАТЯЖЕНИЯ КАНАТА | 2006 |
|
RU2332648C1 |
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ НЕПОДВИЖНОГО ГИБКОГО ОРГАНА | 2001 |
|
RU2188941C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2205375C1 |
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2195637C2 |
| СИСТЕМА ТЕЛЕДИНАМОМЕТРИРОВАНИЯ ГЛУБИННЫХ ШТАНГОВЫХ НАСОСОВ | 1999 |
|
RU2160385C1 |
Изобретение относится к нефтедобывающей и газовой промышленности, в частности к устройствам для измерения и регистрации параметров при спускоподъемных операциях. Задачей является повышение точности измерения веса, надежности определения аварийной ситуации, надежности и безопасности работы при СПО. Для этого устройство содержит датчик усилия, выход которого соединен через искробезопасный блок с первым входом контроллера, первый выход которого соединен с устройством перегрузки, а второй выход соединен через искробезопасный блок с табло, блок управления, выход которого соединен с входом контроллера, блок памяти, входом-выходом соединенный с контроллером, и блок питания. Устройство дополнительно содержит амплитудный детектор, датчик усилия выполнен в виде силоизмерительного блока, причем выход его через искробезопасный блок соединен с первым входом контроллера и входом амплитудного детектора, выход которого соединен со вторым входом контроллера, а управляющий вход амплитудного детектора соединен с третьим выходом контроллера. Силоизмерительный блок содержит датчик силы натяжения каната и электрический преобразователь. 1 з.п. ф-лы, 1 ил.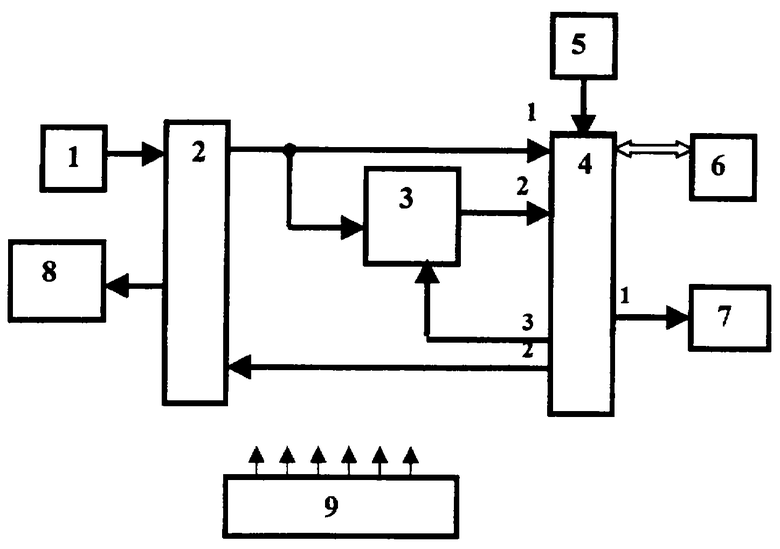
| СТИРАЛЬНАЯ МАШИНА | 1924 |
|
SU3825A1 |
| Ветроводяной двигатель | 1928 |
|
SU13258A1 |
| Устройство для автоматического замера длины труб при спускоподъемных операциях в скважине | 1987 |
|
SU1550119A1 |
| Крановое массоизмерительное устройство | 1983 |
|
SU1143987A1 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Весоизмерительное устройство | 1988 |
|
SU1583751A1 |
| Весоизмерительное устройство для грузов, подвешенных в захвате конвейера | 1991 |
|
SU1806331A3 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗА | 1997 |
|
RU2119648C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА ПОДЪЕМНЫМ МЕХАНИЗМОМ С ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2145701C1 |
| US 6369339 B1, 09.04.2002 | |||
| СПОСОБ ПОЛУЧЕНИЯ КАТАЛИЗАТОРА ДЛЯ ПРОИЗВОДСТВА МЕТАКРИЛОВОЙ КИСЛОТЫ | 2004 |
|
RU2351395C2 |
| Способ отварки обыкновенного и пестротканого товара | 1929 |
|
SU35809A1 |
| Экономайзер | 0 |
|
SU94A1 |

