Изобретение относится к разделу машиностроения, а именно к созданию механизмов для разделения вращательного движения способом передачи движения с одного вала на два других.
Известен параллелограмный рычажный механизм [1, с.88, схема в таблице во второй половине] , содержащий в своем составе два кривошипа и шатун. Вращательное движение в нем с вала одного кривошипа передается на вал другого кривошипа.
Недостатком такого механизма является невозможность разделять движение на два выходных вала.
Известен также четырехзвенный механизм с двумя поступательными парами [1, с. 89, рис. внизу слева], который носит название двухкулисного. В нем движение от входного кривошипа передается к выходному кривошипу, а звено образует с кривошипами поступательные пары.
Недостаток такого механизма-муфты заключается также в невозможности разделить движение на два выхода вала.
Наиболее близким к заявляемому является рычажный механизм [2, с.30, рис. 28] , называемый двойным параллелограммом, в этом механизме от входного кривошипа движение передается на два выходных звена.
Недостатком такого механизма является черезмерно высокая потребная точность, которая должна быть предъявлена при изготовлении длин звеньев. Любая ошибка при изготовлении вызывает неработоспособность механизма. Дело в том, что согласно известной формуле Чебышева [3, с.46, формула (2, 8)]
W=3n-2p5,
где W - подвижность механизма,
n - число подвижных звеньев,
р5- число одноподвижных кинематических пар-шарниров.
В схеме механизма двойного параллелограмма [2] число подвижных звеньев n= 4, число шарниров р5=6, и по формуле (1) подвижность W=0, т.е. в принципе он не работоспособен. "Заставить" его работать можно лишь при особо точном изготовлении звеньев.
Задачей настоящего изобретения является создание рычажного механизма, который может разделять вращательное движение на два выходных вала при обеспечении полной работоспособности механизма.
Для решения поставленной задачи в рычажный механизм вводят между входным кривошипом и выходными звеньями два дополнительных звена, первое из которых шарнирно соединяет входное звено со вторым дополнительным звеном, а второе дополнительное звено образует с выходными звеньями поступательные кинематические пары.
Предлагаемый рычажный механизм показан на фиг. 1, на фиг. 2 показан вид А фиг. 1.
Механизм содержит в своем составе входной кривошип 1, в виде эксцентрика, первое дополнительное звено 2, также выполненное в виде эксцентрика, второе дополнительное звено 3 и выходные звенья 4 и 5. Звенья в механизме образуют вращательные кинематические пары: I - входного кривошипа со стойкой, II - входного звена с первым дополнительным звеном, III - первого дополнительного звена со вторым дополнительным звеном, IV и V - выходных звеньев 4 и 5 со стойкой. Оси Х-Х и Y-Y обозначают направление поступательного движения между звеньями 3 и 4 и звеньями 3 и 5 соответственно.
Работает механизм следующим образом. Кривошип 1, получая вращательное движение, например, от двигателя, через звено 2 приводит в движение дополнительное звено 3, которое в свою очередь через постоянство поступательные пары приводит во вращение выходные звенья 4-5.
Предлагаемый механизм в отличие от прототипа является работоспособным. Действительно, в его составе пять (1, 2, 3, 4 и 5) звеньев, т.е. n=5, и семь кинематических пар - пять вращательных (I, II, III, IV, V) и две поступательных вдоль осей Х-Х и Y-Y, т.е. р5=7. Тогда, согласно формуле (1),
W=3•5-2•7=15-14=1.
Это значит, что при заданном вращении входного звена 1 все остальные звенья, в том числе и выходные 4 и 5, будут двигаться определенно.
Важно отметить, что скорости вращения второго дополнительного звена 3 и выходных звеньев 4 и 5 будут одинаковыми, т.к. эти звенья соединены между собой в поступательные пары, которые не допустят относительных вращательных движений звеньев. Выбором геометрических размеров звеньев 1, 2 и 3, а также взаиморасположением осей их вращения можно добиться в механизме различной редукции движения, в том числе достичь ситуации, когда скорости входного и выходных звеньев окажутся одинаковыми.
Источники информации
1. А.Ф. Крайнев. Словарь - справочник по механизмам. М.: Машиностроение, 1987.
2. Г. Г. Баранов. Курс теории механизмов и машин. М.: Машиностроение, 1975.
3. И.И. Артоболевский. Теория механизмов и машин. М.: Наука, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 2001 |
|
RU2204748C2 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ | 2001 |
|
RU2210692C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2148143C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ С ПОДВИЖНЫМ ПРИВОДОМ | 2002 |
|
RU2229641C2 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2143073C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2147662C1 |
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1999 |
|
RU2150626C1 |
| ЧЕТЫРЕХЗВЕННЫЙ РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2005 |
|
RU2295080C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ С ДВОЙНЫМ ПРИВОДОМ | 2010 |
|
RU2440525C1 |

Изобретение относится к области машиностроения, в частности к механизмам для разделения вращательного движения способом передачи движения с одного вала на два других. Технический результат - обеспечение полной работоспособности механизма при пониженных требованиях к точности изготовления механизма. Устройство содержит входной кривошип, который шарнирно через первое дополнительное звено связан со вторым дополнительным звеном. Второе дополнительное звено связано с двумя выходными звеньями, образуя с ними поступательные пары. 2 ил.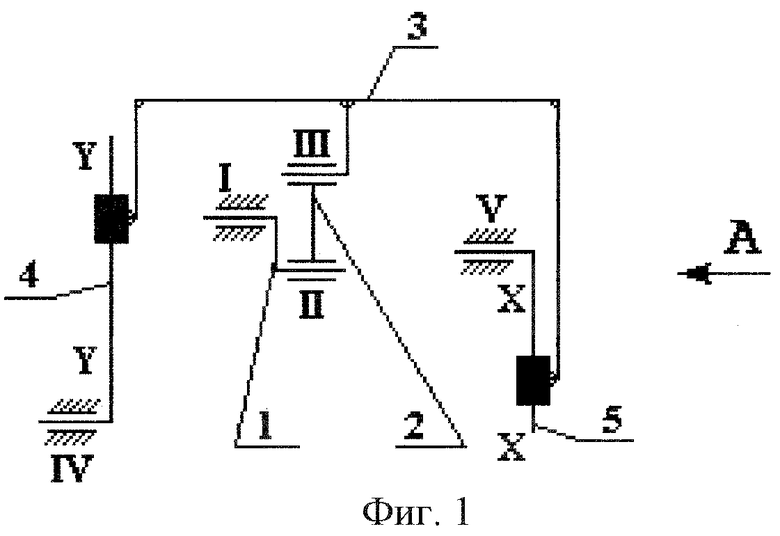
Рычажный механизм для разделения вращательного движения, содержащий входной кривошип и два выходных звена, отличающийся тем, что между входным кривошипом и выходными звеньями вводят два дополнительных звена, первое из которых шарнирно соединяет входное звено со вторым дополнительным звеном, а второе дополнительное звено образует с выходными звеньями поступательные кинематические пары.
| ВСЕСОЮЗНАЯ" | 0 |
|
SU370672A1 |
| Механизм тройного шарнирного параллелограмма | 1978 |
|
SU763633A1 |

