(54) МЕХАНИЗМ ТРОЙНОГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА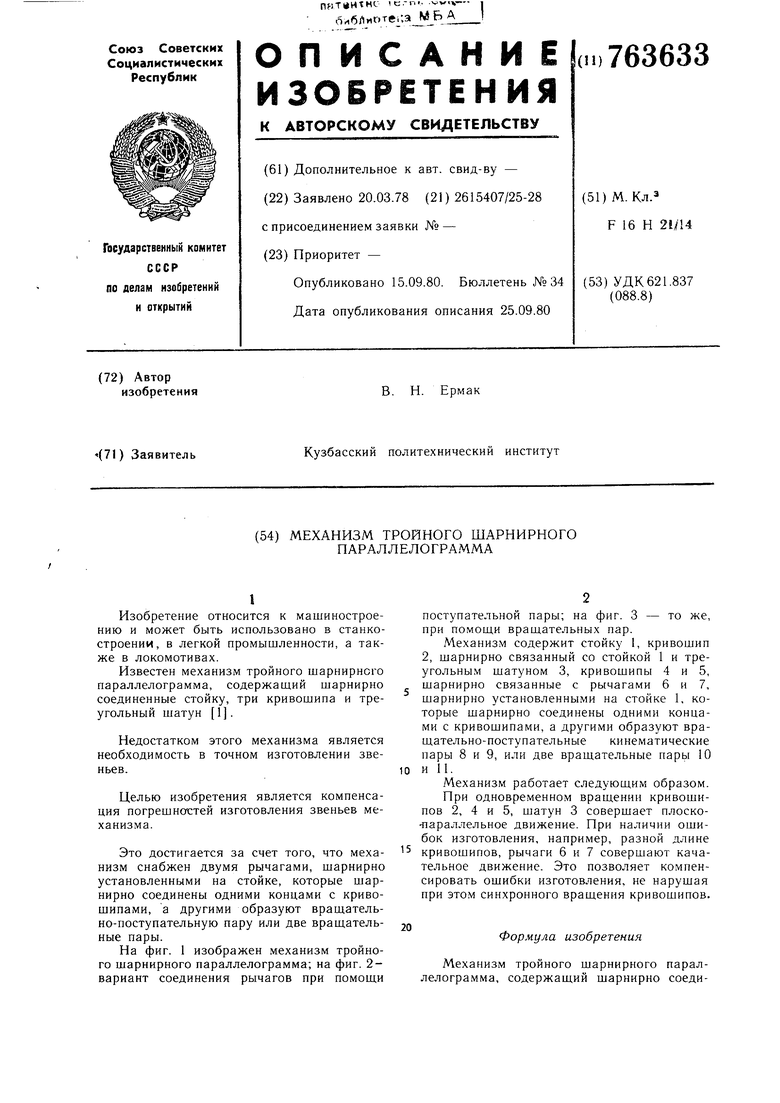
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Шарнирно-рычажный механизм | 1978 |
|
SU926404A1 |
| Шарнирно-рычажный механизм шаговых перемещений | 1986 |
|
SU1414985A1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ПРИВОД РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2495261C2 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| ГРЕЙФЕР | 1993 |
|
RU2082854C1 |
| СПОСОБ СОЗДАНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ РАБОЧЕГО ОРГАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2767083C2 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
1
Изобретение относится к машиностроению и может быть использовано в станкостроении, в легкой промышленности, а также в локомотивах.
Известен механизм тройного шарнирного параллелограмма, содержаш,ий шарнирно соединенные стойку, три кривошипа и треугольный шатун 1.
Недостатком этого механизма является необходимость в точном изготовлении звеньев.
Целью изобретения является компенсация погрешнох:тей изготовления звеньев механизма.
Это достигается за счет того, что механизм снабжен двумя рычагами, шарнирно установленными на стойке, которые шарнирно соединены одними концами с кривошипами, а другими образуют враш,ательно-поступательную пару или две враш,ательные пары.
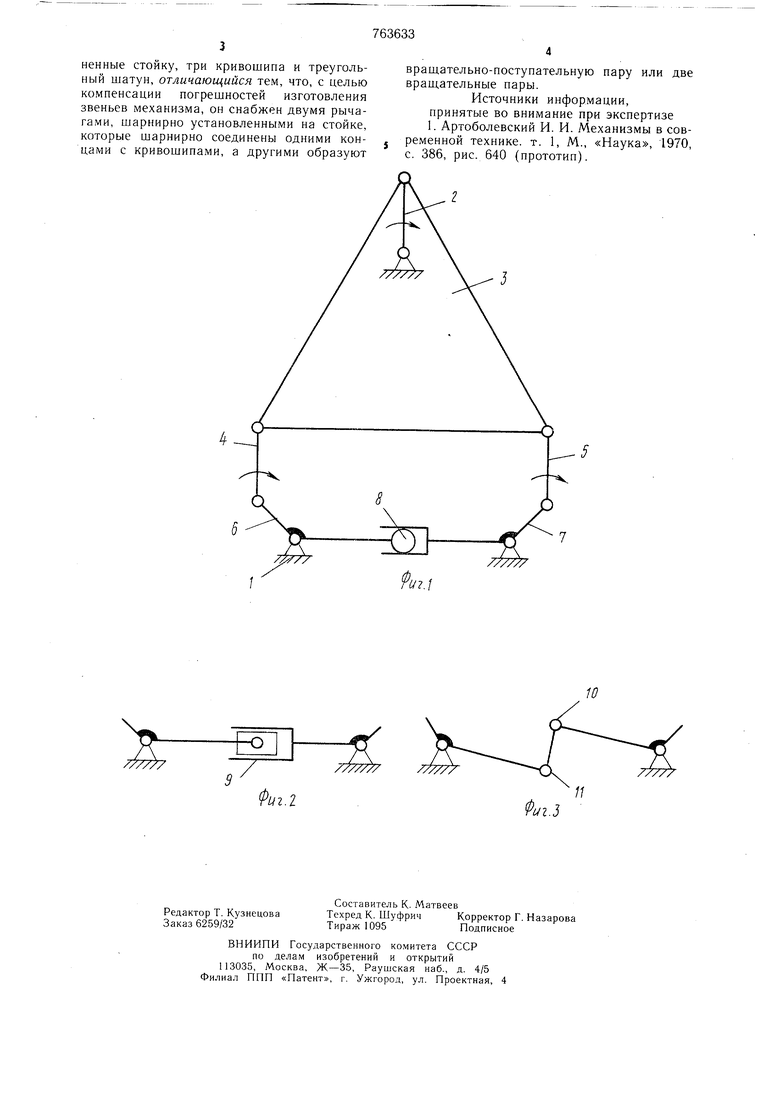
На фиг. 1 изображен механизм тройного шарнирного параллелограмма; на фиг. 2вариант соединения рычагов при помош.и
поступательной пары; на фиг. 3 - то же, при помош,и враш,ательных пар.
Механизм содержит стойку 1, кривошип 2, шарнирно связанный со стойкой 1 и треугольным шатуном 3, кривошипы 4 и 5, шарнирно связанные с рычагами 6 и 7, шарнирно установленными на стойке 1, которые шарнирно соединены одними концами с кривошипами, а другими образуют вращательно-поступательные кинематические пары 8 и 9, или две вращательные пары 10
10 и 11.
Механизм работает следующим образом. При одновременном вращении кривошипов 2, 4 и 5, шатун 3 совершает плоско-параллельное движение. При наличии ошибок изготовления, например, разной длине
кривошипов, рычаги 6 и 7 совершают качательное движение. Это позволяет компенсировать ошибки изготовления, не нарушая при этом синхронного вращения кривощипов.
20
Формула изобретения
Механизм тройного шарнирного параллелограмма, содержащий шарнирно соединенные стоику, три кривошипа и треугольный шатун, отличающийся тем, что, с целью компенсации погрешностей изготовления звеньев механизма, он снабжен двумя рычагами, шарнирно установленными на стойке, которые шарнирно соединены одними концами с кривошипами, а другими образуют
вращательно-поступательную пару или две вращательные пары.
Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизмы в современной технике, т. 1, М., «Наука, 1970, с. 386, рис. 640 (прототип).
иг.2
