Изобретение относится к машиностроению, а конкретно к механизмам с подвижными гидроприводами, получившим широкое применение в конструкциях экскаваторов, гидроподъемников, а также в тех механизмах, в которых необходимо получение выстоя выходного звена, т.е. его остановки на определенный промежуток времени.
Известен рычажный механизм подъема стрелы [1, стр.379, рис.11.1]. Этот механизм снабжен подвижным гидроприводом, состоящим из гидроцилиндра, соединенного вращательной парой со стойкой, ведущего поршня со штоком, образующего вращательную кинематическую пару с ведомым звеном. За счет подаваемой жидкости от насоса в гидроцилиндр под поршень задается относительное движение поршня, которое приводит в движение как сам гидроцилиндр, так и ведомое звено. Именно потому, что при задании относительного движения поршня относительно гидроцилиндра приобретает движение и сам гидроцилиндр, такие механизмы называют механизмами с подвижным приводом.
Недостатком описанного аналога является то, что использованная в нем структурная схема не позволяет получить сложного движения выходного звена, в том числе обеспечения его полного оборота вокруг стойки (неподвижного звена).
Наиболее близким предлагаемому механизму является рычажный механизм с подвижным приводом [2], включающий подвижный гидропривод, состоящий из гидроцилиндра и поршня со штоком, гидроцилиндр механизма соединен во вращательные кинематические пары с двумя подвижными звеньями, одно из которых является кривошипом, а второе - коромыслом (ведомым звеном), а шток поршня образует вращательную кинематическую пару со вторым коромыслом. Описанный механизм примем за прототип. Недостатком устройства является невозможность обеспечения выстоя выходного звена.
Задачей предлагаемого изобретения является обеспечение возможности заданного выстоя ведомого звена.
Сущность предлагаемого механизма состоит в том, что шток первого подвижного гидропривода образует вращательную кинематическую пару с гидроцилиндром второго подвижного гидропривода, а шток поршня второго подвижного гидроцилиндра через вращательную кинематическую пару связан с ведомым звеном, при этом питание гидроприводам подается независимо друг от друга.
Общий вид механизма показан на чертеже.
Механизм состоит из кривошипа 1, первого гидроцилиндра 2, поршня со штоком 3, который соединен со вторым гидроцилиндром 5 во вращательную пару (С), поршень со штоком 6 соединен с ведомым звеном 8 во вращательную пару (Е). Гидроцилиндры 2 и 5 соединены со стойкой с помощью коромысел 4 и 7.
Работает механизм следующим образом. Подаваемая в гидроцилиндры 2 и 5 жидкость создает силу, действующую на поршни 3 и 6, которые приходят в движение вместе со штоками. В результате этого движения начнут поворачиваться рычаги 1, 4, 7 и 8. В предлагаемом механизме гидроцилиндры могут работать как по отдельности, так и совместно. В каждый подвижный гидроцилиндр жидкость подается независимо. Это позволяет осуществить несколько режимов работы данного механизма: первый режим - жидкость подается в отверстия а и с, второй режим - жидкость подается в отверстия а и d, третий - в отверстия b и c, четвертый - в отверстия b и d и т.д. Манипулируя подачей жидкости в гидроцилиндры 2 и 5, можно добиться того, что в определенный промежуток времени выходное звено 8 будет находиться в покое. Этим самым будет достигнута та цель, которая ставилась перед изобретением, а именно обеспечение возможности выстоя выходного звена - коромысла.
Подвижность плоских рычажных механизмов определяется по формуле Чебышева П.Л. [1, стр.53, формула 3.1], имеющей вид:

здесь W - подвижность механизма, n - число подвижных звеньев, р5 - число кинематических пар пятого класса (одноподвижных).
В данном механизме число подвижных звеньев n=8 и вращательных кинематических пар (пятого класса) р5=11.
По формуле (1) получим:
W=3n-2p5=3·8-2·11=24-22=2.
Отсюда следует, что данный двухподвижный плоский стержневой механизм вполне работоспособен.
Источники информации
1. Машиностроительный гидропривод. Под ред. проф. В.Н.Прокофьева. Москва, "Машиностроение", 1978, 495 с.
2. Пат. 2229641, РФ, МПК F16H 21/00. Рычажный механизм с подвижным приводом / Дворников Л.Т., Вандышев А.В. (Россия). - 2002116927/11; заявлено 24.06.2002; опубл. 27.05.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛНОПОВОРОТНЫЙ ДВУХКРИВОШИПНЫЙ ПЛОСКИЙ МЕХАНИЗМ С ПОДВИЖНЫМ ЛИНЕЙНЫМ ГИДРОПРИВОДОМ | 2012 |
|
RU2520623C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ С ПОДВИЖНЫМ ПРИВОДОМ | 2002 |
|
RU2229641C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЕГУЛИРУЕМЫЙ ЗУБЧАТО-РЫЧАЖНЫЙ ПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 2010 |
|
RU2440526C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
Изобретение относится к машиностроению. Рычажный механизм с двойным приводом включает в себя два подвижных гидропривода, соединенных со стойкой через коромысла и ведомое звено. Шток первого подвижного гидропривода образует вращательную кинематическую пару с гидроцилиндром второго подвижного гидропривода. Шток поршня второго подвижного гидроцилиндра через вращательную кинематическую пару связан с ведомым звеном. В результате обеспечивается возможность заданного выстоя ведомого звена, то есть возможность его остановки на определенный заданный промежуток времени. 1 ил.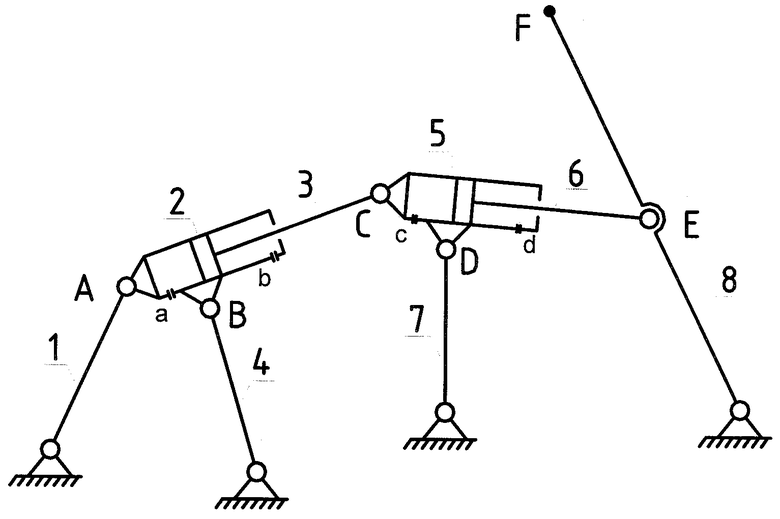
Рычажный механизм с двойным приводом, включающий в себя два подвижных гидропривода, соединенных со стойкой через коромысла и ведомое звено, при этом шток первого подвижного гидропривода образует вращательную кинематическую пару с гидроцилиндром второго подвижного гидропривода, а шток поршня второго подвижного гидроцилиндра через вращательную кинематическую пару связан с ведомым звеном.
| РЫЧАЖНЫЙ МЕХАНИЗМ С ПОДВИЖНЫМ ПРИВОДОМ | 2002 |
|
RU2229641C2 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| DE 4314227 А1, 03.11.1994. | |||

