Изобретение относится к области машиностроения, а конкретно к редукторам поступательного движения, и может быть использовано для увеличения усилий на ведомом звене.
Известен самотормозящийся винтовой редуктор (см а.с. N 1033799, кл. F 16 H 25/20, заявл. 05.01.82), состоящий из самотормозящихся винта и гайки, корпуса и несамотормозящейся пары винт-гайка.
Наиболее близким по техническому решению является винтовой редуктор поступательного движения (патент РФ N 2082047, кл. 6 F 16 H 25/20, заявл. 27.07.94), состоящий из ведущего ползуна, резьбовой втулки, резьбового вала и ведомого ползуна.
Одним из существенных недостатков винтовых соединений вообще является возможное самоторможение. При создании редукторов поступательного движения гарантировать отсутствие самоторможения можно лишь, используя большее число винтовых соединений в конструкции. В прототипе всего пять винтовых соединений, что требует высокой точности их изготовления с тем, чтобы работа редуктора происходила без заклинивания. Это является его существенным недостатком.
Задачей настоящего изобретения является создание такого редуктора, в котором использовано такое число винтовых соединений, при котором обеспечивается более широкий выбор узлов подъема резьб в допускаемом диапазоне отсутствия самоторможения.
Данная задача решается таким образом, что предлагаемый механизм содержит в своем составе дополнительную резьбовую втулку, входящую в кинематические пары с ведущим звеном, резьбовой втулкой и резьбовым валом.
На чертеже изображен редуктор, состоящий из ведущего ползуна 1, находящегося в направляющем устройстве, резьбового вала 2, резьбовой втулки 3, дополнительной резьбовой втулки 4 и ведомого ползуна 5, находящегося в направляющем устройстве. Резьбы у звеньев редуктора могут быть как внешними, так и внутренними.
Предлагаемый механизм относится к классу клиновых или винтовых механизмов. Для такого рода механизмов, относящихся к четвертому семейству, структурной формулой [3, стр.50 последняя формула на странице] является формула вида
W = 2n-p5, (1)
где W - подвижность системы,
n - число подвижных звеньев,
p5 - число поступательных или винтовых кинематических пар.
Для прототипа по формуле (1) при n = 4 - четырех подвижных звеньев, и 7 винтовых (поступательных) парах W = 2•4-7=1.
В предлагаемом устройстве дополнительная втулка есть дополнительное звено, т.е. число звеньев становится n = 5, но эта дополнительная втулка привносит еще две резьбы, т.е. две дополнительных винтовых пары и (со звеном 1 и со звеном 2) всего пар становится 9, тогда по (1) получим W = 2•5-1•9 = 1.
Т.е. предлагаемый механизм является вполне работоспособным. Работает редуктор следующим образом. При поступательном движении ведущего ползуна 1 резьбовой вал 2, резьбовая втулка 3 и дополнительная резьбовая втулка 4 через несамотормозящиеся резьбы приходят во вращение с одновременным поступательным движением, в результате чего получает движение выходной ползун 5. Вал 2, втулка 3 и дополнительная втулка 4 имеют по три винтовые нарезки резьбы. Одной из нарезок-резьб они входят в зацепление с ведущим ползуном, другой соединяются между втулкой, дополнительной втулкой и резьбовым валом, а третьей резьбой втулка и вал входят в зацепление с ведомым ползуном, приводя его в поступательное движение. Таким образом, поступательное движение на входе преобразуется в поступательное движение на выходе.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2000 |
|
RU2184290C2 |
| ЧЕТЫРЕХЗВЕННЫЙ РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2005 |
|
RU2295080C1 |
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082047C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2147662C1 |
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 2001 |
|
RU2204748C2 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ | 2001 |
|
RU2210692C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2148143C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2143073C1 |
| ГИДРОДОМКРАТ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2007 |
|
RU2329381C1 |
| ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА | 2003 |
|
RU2252912C2 |
Изобретение относится к машиностроению. Сущность изобретения заключается в том, что редуктор, содержащий ведущий ползун, резьбовую втулку, резьбовой вал и ведомый ползун, снабжен дополнительной резьбовой втулкой, выполненной с возможностью воздействия своими резьбами с ведущим ползуном, резьбовой втулкой и резьбовым валом. Технический результат - создание такого редуктора, в котором использовано такое число винтовых соединений, при котором обеспечивается более широкий выбор узлов подъема резьб в допускаемом диапазоне отсутствия самоторможения. 1 ил.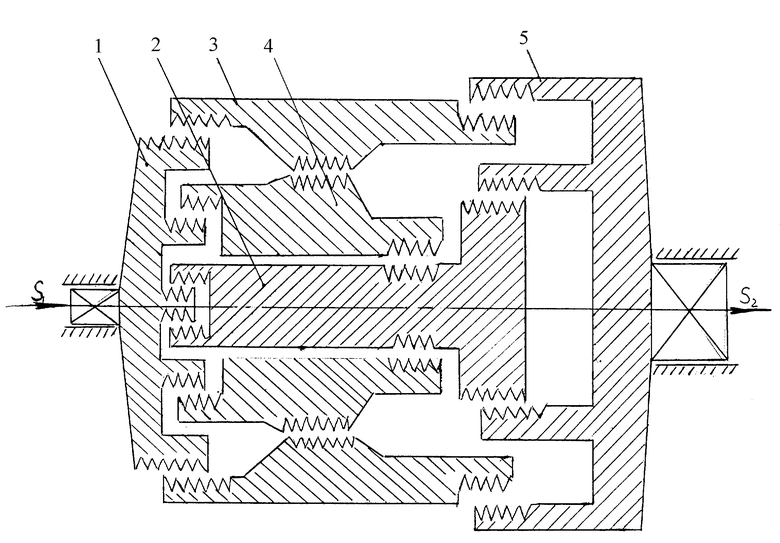
Редуктор поступательного движения, содержащий ведущий ползун, резьбовую втулку, резьбовой вал и ведомый ползун, отличающийся тем, что он снабжен дополнительной резьбовой втулкой, выполненной с возможностью взаимодействия своими резьбами с ведущим ползуном, резьбовой втулкой и резьбовым валом.
| РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082047C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 1992 |
|
RU2031283C1 |
| Винтовой телескопический механизм | 1984 |
|
SU1221419A1 |
| Винтовой телескопический механизм | 1989 |
|
SU1679096A1 |
| СПОСОБ БОРЬБЫ С ЗАСОРЕНИЕМ И ФОРМИРОВАНИЯ ПОСЕВОВ СВЕКЛЫ | 1995 |
|
RU2111635C1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ БЕЛКОВОГО КОРМОВОГО ПРОДУКТА | 2015 |
|
RU2604937C1 |
| EP 0355891 А2, 01.08.1989 | |||
| СПОСОБ ПОЛУЧЕНИЯ L-ГЛЮТАМИНАЗЫ | 0 |
|
SU371704A1 |
