Использование нескольких диапазонов излучения в радиолокационных системах (РЛС) является одним из наиболее эффективных приемов улучшения их тактических показателей. Однако, при совместной обработке сигналов в различных диапазонах появляются несколько проблем, в том числе при отождествлении радиолокационных измерений, получаемых в разных диапазонах на принадлежность к одной цели, особенно при многоцелевом сопровождении (МЦС).
Идентификация (отождествление) измерений, под которой понимается процедура принятия решения об их принадлежности определенной цели, является необходимым этапом работы РЛС при многоцелевом сопровождении. К настоящему времени наиболее распространенным способом идентификации является отождествление измерений в пространственных стробах, формируемых относительно результатов экстраполяции измеряемых координат на следующий такт работы [1].
Под стробом отождествления, именуемым также корреляционным, понимается область многомерного пространства с размерами ±Δхi, 
Суть метода сопоставления в стробах отождествления в простейшем варианте состоит в том, что все полученные от одной цели измерения zi


то данная траектория и считается соответствующей принятым измерениям.
Существенным недостатком идентификации результатов измерений в стробах отождествления является относительно низкая ее достоверность при сопровождении маневрирующих целей [3]. Это связано с необходимостью применения достаточно больших стробов, поскольку в процессе идентификации сравниваются три случайных процесса: измерений, экстраполяции и ускорений маневров. Кроме того, сравнение в стробах отождествления возможно лишь по небольшому числу m измеряемых фазовых координат (m≤4) и в ходе его не учитываются внутренние детерминированные связи экстраполируемых фазовых координат и предыстории их изменений.
Необходимо отметить, что в РЛС, использующих при МЦС идентификацию в стробах отождествления, разрешающая способность по всем координатам определяется не параметрами сигналов и антенн, а размерами стробов. Поскольку при сопровождении интенсивно маневрирующих целей размеры стробов выбираются достаточно большими, то это предопределяет ухудшение разрешающей способности.
Кроме того, сам факт выбора в качестве решающего правила порогового критерия является нерациональным по крайней мере по двум причинам. Одна их них обусловлена сложностью назначения оптимального размера строба, адаптирующегося к быстро изменяющимся условиям сопровождения маневрирующих целей. Другая - предопределена низкой вероятностью правильного принятия решения вблизи границ стробов, когда даже небольшая погрешность измерений может изменить решение об их соответствии той или иной траектории на противоположное.
Недостатки стробового отождествления проявляются особенно сильно в многодиапазонных РЛС с последовательным излучением сигналов в различных диапазонах, поскольку в различных диапазонах используются стробы различных размеров.
Более совершенными являются алгоритмы так называемой бесстробовой идентификации [3], основанные на формировании решающего правила по минимуму того или иного квадратичного функционала. Такой подход позволяет получить высоко достоверное решение, не принимая во внимание абсолютную величину функционала, а лишь определив его минимальное значение в процессе перебора траекторий.
Одной из наиболее распространенных является процедура идентификации измерений по минимуму функционала [3]
где qi - весовые коэффициенты, определяемые важностью i-й координаты. Однако в этом функционале, используемом в качестве прототипа, не учитывается предыстория движения j-й цели, являющаяся важным критерием отождествления, особенно на пересекающихся трассах.
В приложении к многодиапазонным РЛС такой подход позволит еще больше повысить достоверность отождествления именно за счет последовательного использования измерений в различных диапазонах.
Ниже, в приложении к двухдиапазонной РЛС, предлагается бесстробовый способ отождествления измерений при условии, что зондирующие сигналы в разных диапазонах, значительно отличающихся по частоте излучаются с периодом 2Т для каждого диапазона и интервалом Т между ними и в каждом диапазоне формируются признаки диапазона Q1 и Q2 соответственно длят измерений каждого диапазона, где 
Кроме того, считается, что имеются типовые фильтры (например, α,β - фильтр [4]), формирующие оценки всех этих координат, их первых производных и результаты их экстраполяции на следующий такт измерений.
Суть предлагаемого способа состоит в том, что в каждом j-ом диапазоне для полученной группы измерений для всех сопровождаемых целей формируются невязки
Δzj,pi(k)=Qj[zj,i(k)-xэ,pi(k)], j=1,2,

Представляющие собой разность между результатами полученных измерений zj,i и результатами прогнозирования xэ,pi оцениваемых i-х фазовых координат p-й отслеживаемой цели (
Далее, для всех сопровождаемых траекторий формируются функционалы качества

где Dj,i - дисперсии ошибок измерений i-й координаты для j-го диапазона; 

Таким образом, достоинством предлагаемого способа отождествления является существенно более высокая достоверность отождествления, предопределяющая возможность отождествления целей. Решение о принадлежности полученных измерений той или иной из сопровождаемых целей (с номером p*) принимается по минимальному значению (4), определяемому в процессе их перебора:
Принципиальными отличиями предлагаемого метода от прототипа является учет различающихся показателей точности используемых диапазонов и предыстории движения при формировании функционалов качества (4). Учет различной точности измерителей достигается использованием весовых коэффициентов 
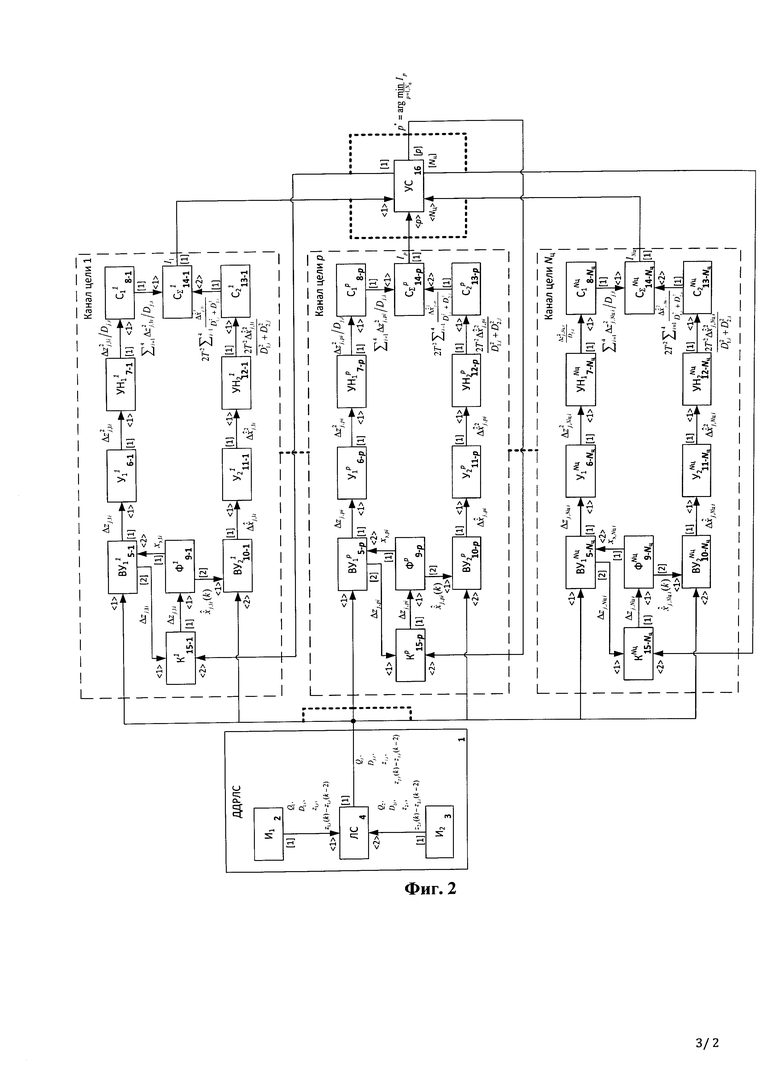
Структурная схема системы, реализующей предложенный способ отождествления, приведена на фиг. 2.
Система является многоканальной, число каналов определяется числом Nц сопровождаемых целей. Общей для всех каналов является двухдиапазонная четырехкоординатная (m=4)РЛС (блок 1ДДРЛС), содержащая:
блок 2 И1 - измерители дальности, скорости сближения и углов в горизонтальной и вертикальной плоскостях первого диапазона, формирующие соответствующие измерения z1,i, 
блок 3 И2 - аналогичные измерители второго диапазона, формирующие аналогичные измерения z2,i, 
блок 4 ЛС - логический сумматор, формирующий общую последовательность измерений zj,i, j=1,2,
блок 16 УС - устройство сравнения, осуществляющее поиск номера цели p*, соответствующего минимуму по всем функционалам Ip (4), и передающего управление на соответствующий ключ 15-p*;
набор блоков для канала каждой цели p:
блок 
блок 

блок 
блок 
блок 


блок 

блок 

блок 
блок 
блок 
блок 
При этом выход [1] блока 2 соединен с входом <1> блока 4; выход [1] блока 3 соединен с входом <2> блока 4; выход [1] блока 4 соединен со входами <1> блоксоответствующих блоков 5-1,…,5-р,…,5-Nц и входами <2> блоков 10-1,…,10-p,…,10-Nц; выход [1] блоков 5-1,…,5-р,…,5-Nц. соединен с входом <1> блоков 6-1,…,6-p,…,6-Nц; выход [2] блоков 5-1,…,5-p,…,5-Nц соединен с входом <1> блоков 15-1,…,15-р,…,15-Nц; выход [1] блоков 7-1,…,7-p,…,7-Nц соединен с входом <1> блоков 8-1,…,8-р,…,8-Nц; выход [1] блоков 8-1,…,8-p,…,8-Nц соединен с входом <1> блоков 14-1,…,14-p,…,14-Nц; выход [1] блоков 9-1,…,9-р,…,9-Nц соединен с входом <2> блоков 5-1,…,5-р,…,5-Nц; выход [2] блоков 9-1,…,9-р,…,9-Nц соединен с входом <1> блоков 10-1,…,10-р,…,10-Nц; выход [1] блоков 10-1,…,10-р,…,10-Nц соединен с входом <1> блоков 11-1,…,11-р,…,11-Nц; выход [1] блоков 11-1,…,11-р,…,11-Nц соединен с входом <1> блоков 12-1,…,12-р,…,12-Nц; выход [1] блоков 12-1,…,12-р,…,12-Nц соединен с входом <1> блоков 13-1,…,13-p,…,13-Nц; выход [1] блоков 13-1,…,13-p,…,13-Nц соединен с входом <1> блоков 14-1,…,14-p,…,14-Nц; выход [1] блоков 14-1,…,14-р,…,14-Nц соединен с входами <1>,…,<p>,…,<Nц> блока 16; выход [1] блоков 15-1,…,15-р,…,15-Nц соединен с входом <1> блоков 9-1,…,9-р,…,9-Nц; выходы [1],…,[p],…,[Nц] блока 16 соединены с входом <1> соответствующих блоков 15-1,…,15-р,…,15-Nц.
Функционирование системы в динамике включает следующие операции.
Измерения z1,i и z2,i дальности, скорости сближения и углов в горизонтальной и вертикальной плоскостях от блоков 2 и 3 измерителей первого и второго диапазонов соответственно с соответствующими признаками Qj, а также их приращения с предыдущего такта [zj,i(k)-zj,i(k-2)] передаются с периодом 2T и сдвигом Т относительно друг друга в блок 4 (логический сумматор). Сформированная общая последовательность zj,i измерений с выхода логического сумматора поступает с интервалом Т на блоки 5-1,…,5-р,…,5-Nц (вычитающие устройства), а их приращения - на блоки 10-1,…,10-р,…,10-Nц. Одновременно, на вход блоков 5-1,…,5-p,…,5-Nц с выхода фильтров 9-1,…,9-p,…,9-Nц передаются результаты прогноза xэ,pi. В результате, на выходе с блоков 5-1,…,5-p,…,5-Nц формируются невязки Δzj,pi(k), поступающие на вход блоков 6-1,…,6-р,…,6-Nц, с выхода которых квадраты невязок 
После суммирования слагаемых в блоках 14-1,…,14-p,…,14-Nц формируются функционалы I1,…,Ip,…,INц, характеризующие степень соответствия полученных измерений той или иной цели.
Сформированные функционалы I1,…,Ip,…,INц поступают в блок 16 (устройство сравнения), где из них выбирается функционал Ip*, с наименьшим значением (4), свидетельствующий о принадлежности полученных измерений цели p*. После этого, с выхода блока 16, соответствующему p*, передается сигнал на блок 15-p*, замыкающий цепь подачи невязки Δzj,p*i в фильтр соответствующего канала, в котором формируются оценки 


Литература
1. Справочник по радиолокации. Кн. 1 / Под ред. М.И. Сколника. Пер. с англ. под общей ред. В.С. Вербы. - М.: Техносфера, 2014. - 672 с.
2. Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиолокационные комплексы истребителей. - М.: Воениздат, 1994.
3. Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 2. Применение авиационных радиоэлектронных комплексов при решении боевых и навигационных задач. / Под ред. М.С. Ярлыкова. - М.: Радиотехника, 2012. - 256 с.
4. Бар-Шалом Я., Ли Х.-Р. Траекторная обработка. Принципы, способы и алгоритмы. Часть 2. / Пер. с англ. Д.Д. Дмитриева. - М.: МГТУ им. Н.Э. Баумана, 2011. - 239 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ В РЕЖИМЕ ОБЗОРА | 2001 |
|
RU2207589C2 |
| Экстраполятор с адаптацией по целевому функционалу | 2021 |
|
RU2780197C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ ВЫСОТ И РЕНТГЕНОВСКИЙ ВЫСОТОМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2236024C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГУЛЯРНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ С ЭЛЕМЕНТАМИ, СОСТАВЛЕННЫМИ ИЗ ДВОИЧНЫХ СИГНАЛОВ | 2011 |
|
RU2469382C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ МНОГОКАНАЛЬНОЙ ФАЗОВОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2527943C1 |
Изобретение относится к радиолокации и может быть использовано для обработки сигналов двухдиапазонных радиолокационных систем. Достигаемый технический результат - повышение быстродействия и точности идентификации измерений, приходящих от двухдиапазонных радиолокационных систем. Суть предлагаемого способа состоит в том, что в каждом j-ом диапазоне для полученной группы измерений для всех сопровождаемых целей формируются невязки, представляющие собой разность между результатами полученных измерений и результатами прогнозирования оцениваемых фазовых координат отслеживаемой цели. Далее, для всех сопровождаемых траекторий формируются функционалы качества. Решение о принадлежности полученных измерений той или иной из сопровождаемых целей принимается по минимальному значению функционалов, определяемому в процессе их перебора. Система идентификации измерений для двухдиапазонной радиолокационной системы выполнена определенным образом. 2 н.п. ф-лы, 2 ил.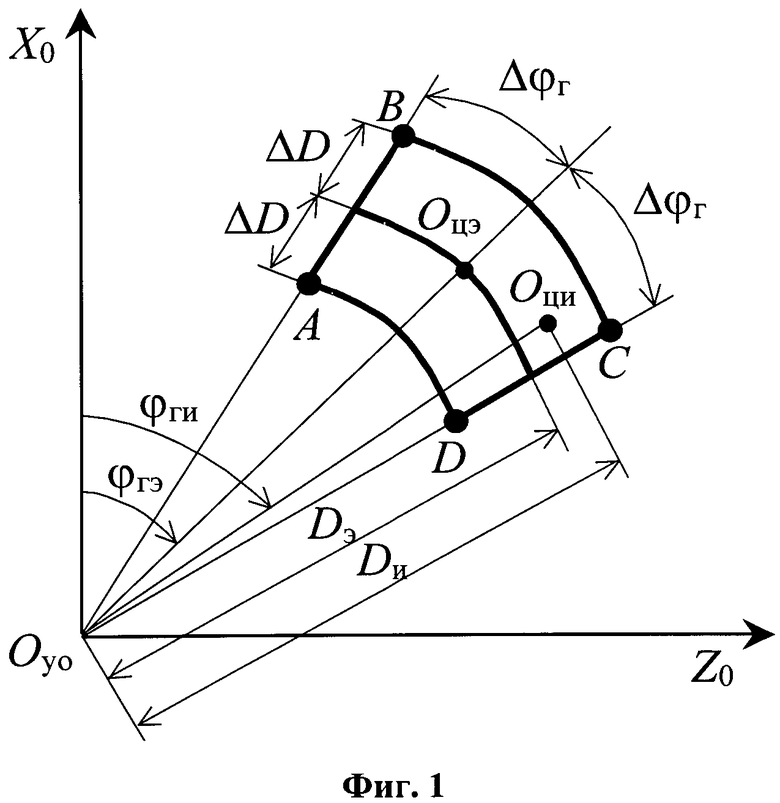
1. Способ идентификации измерений для двухдиапазонной радиолокационной системы, в котором в каждом j-ом диапазоне для полученной группы измерений для всех сопровождаемых целей формируются невязки Δzj,pi i-x координат ( , m - число измерителей) для p-й траектории и измерений на момент k, k=1, 2, …, прихода измерений:
, m - число измерителей) для p-й траектории и измерений на момент k, k=1, 2, …, прихода измерений:

где Qj - признак прихода измерений zj,i(k) i-й координаты от j-го диапазона, xэ,pi(k) - прогноз i-й координаты для p-й траектории ( - условный номер цели, Nц - число отслеживаемых целей), на основе которых для каждой отслеживаемой траектории формируются функционалы качества
- условный номер цели, Nц - число отслеживаемых целей), на основе которых для каждой отслеживаемой траектории формируются функционалы качества

где Dj,i - дисперсии ошибок измерений i-й координаты для j-го диапазона; Т - интервал между приходом измерений; 
 - оценки скорости изменения измерений zj,i i-й координаты для j-го диапазона, рассчитываемые по правилу
- оценки скорости изменения измерений zj,i i-й координаты для j-го диапазона, рассчитываемые по правилу

при этом решение о принадлежности полученных измерении той или иной из сопровождаемых целей принимается по минимальному значению функционалов Ip,
 , определяемому в процессе их перебора:
, определяемому в процессе их перебора:

2. Система идентификации измерений для двухдиапазонной радиолокационной системы, состоящая из двухдиапазонной четырехкоординатной РЛС (блок 1); измерителей (блок 2), формирующих соответствующие измерения z1,i i-й координаты, ( - дальности, скорости сближения и углов в горизонтальной и вертикальной плоскостях) первого диапазона с периодом 2Т и признаком Q1; измерителей (блок 3), формирующих аналогичные измерения z2,i второго диапазона с периодом 2Т и признаком Q2, сдвинутые на интервал Т относительно измерений первого диапазона; логического сумматора (блок 4), формирующего общую последовательность измерений zj,i, j=1,2, следующих с интервалом Т; устройства сравнения (блок 16), осуществляющего поиск номера канала цели p*, соответствующего минимуму по всем сформированным на блоках 14-1, …, 14-Nц функционалам Ip, и передающего управление на соответствующий ключ 15-р*; для каждого канала цели p: вычитающего устройства (блок 5-р), формирующего набор невязок Δzj,pi для всех i-x координат прогноза xэ,pi(k) для p-й траектории и измеренных координат zj,i для j-го диапазона; умножителя (блок 6-р), формирующего квадрат невязки
- дальности, скорости сближения и углов в горизонтальной и вертикальной плоскостях) первого диапазона с периодом 2Т и признаком Q1; измерителей (блок 3), формирующих аналогичные измерения z2,i второго диапазона с периодом 2Т и признаком Q2, сдвинутые на интервал Т относительно измерений первого диапазона; логического сумматора (блок 4), формирующего общую последовательность измерений zj,i, j=1,2, следующих с интервалом Т; устройства сравнения (блок 16), осуществляющего поиск номера канала цели p*, соответствующего минимуму по всем сформированным на блоках 14-1, …, 14-Nц функционалам Ip, и передающего управление на соответствующий ключ 15-р*; для каждого канала цели p: вычитающего устройства (блок 5-р), формирующего набор невязок Δzj,pi для всех i-x координат прогноза xэ,pi(k) для p-й траектории и измеренных координат zj,i для j-го диапазона; умножителя (блок 6-р), формирующего квадрат невязки  ; устройства нормирования (блок 7-р), формирующего сигнал
; устройства нормирования (блок 7-р), формирующего сигнал  ; сумматора (блок 8-р), формирующего первое слагаемое функционала
; сумматора (блок 8-р), формирующего первое слагаемое функционала  для каждой сопровождаемой цели; фильтра (блок 9-р), осуществляющего формирование оценок всех i-х координат для p-й траектории и их прогноз xэ,pi(k); вычитающего устройства (блок 10-р), формирующего разность
для каждой сопровождаемой цели; фильтра (блок 9-р), осуществляющего формирование оценок всех i-х координат для p-й траектории и их прогноз xэ,pi(k); вычитающего устройства (блок 10-р), формирующего разность  оценки
оценки  скорости изменения измерений i-й координаты для j-го диапазона и оценки
скорости изменения измерений i-й координаты для j-го диапазона и оценки  ; умножителя (блок 11-р), формирующего квадрат невязки
; умножителя (блок 11-р), формирующего квадрат невязки  ; устройства нормирования (блок 12-р), формирующего сигнал
; устройства нормирования (блок 12-р), формирующего сигнал  ; сумматора (блок 13-р), формирующего второе слагаемое функционала
; сумматора (блок 13-р), формирующего второе слагаемое функционала  для каждой сопровождаемой цели; сумматора (блок 14-р), формирующего функционал Ip; ключа (блок 15-р), замыкающего цепь подачи невязки Δzj,pi в фильтр; при этом выход [1] блока 2 соединен с входом <1> блока 4; выход [1] блока 3 соединен с входом <2> блока 4; выход [1] блока 4 соединен с входами <1> соответствующих блоков 5-1, …, 5-р, …, 5-Nц и входами <2> блоков 10-1, …, 10-р, …, 10-Nц; выход [1] блоков 5-1, …, 5-р, …, 5-Nц соединен с входом <1> блоков 6-1, …, 6-р, …, 6-Nц; выход [2] блоков 5-1, …, 5-р, …, 5-Nц соединен с входом <1> блоков 15-1, …, 15-р, …, 15-Nц; выход [1] блоков 7-1, …, 7-р, …, 7-Nц соединен с входом <1> блоков 8-1, …, 8-р, …, 8-Nц; выход [1] блоков 8-1, …, 8-р, …, 8-Nц соединен с входом <1> блоков 14-1, …, 14-р, …, 14-Nц; выход [1] блоков 9-1, …, 9-р, …, 9-Nц соединен с входом <2> блоков 5-1, …, 5-р, …, 5-Nц; выход [2] блоков 9-1, …, 9-р, …, 9-Nц соединен с входом <1> блоков 10-1, …, 10-р, …, 10-Nц; выход [1] блоков 10-1, …, 10-р, …, 10-Nц соединен с входом <1> блоков 11-1, …, 11-р, …, 11-Nц; выход [1] блоков 11-1, …, 11-р, …, 11-Nц соединен с входом <1> блоков 12-1, …, 12-р, …, 12-Nц; выход [1] блоков 12-1, …, 12-р, …, 12-Nц соединен с входом <1> блоков 13-1, …, 13-р, …, 13-Nц; выход [1] блоков 13-1, …, 13-р, …, 13-Nц соединен с входом <1> блоков 14-1, …, 14-р, …, 14-Nц; выход [1] блоков 14-1, …, 14-р, …, 14-Nц соединен с входами <1>, …,<p>, …, <Nц> блока 16; выход [1] блоков 15-1, …, 15-р, …, 15-Nц соединен с входом <1> блоков 9-1, …, 9-р, …, 9-Nц; выходы [1], …, [p], …, [Nц] блока 16 соединены с входом <1> соответствующих блоков 15-1, …, 15-р, …, 15-Nц.
для каждой сопровождаемой цели; сумматора (блок 14-р), формирующего функционал Ip; ключа (блок 15-р), замыкающего цепь подачи невязки Δzj,pi в фильтр; при этом выход [1] блока 2 соединен с входом <1> блока 4; выход [1] блока 3 соединен с входом <2> блока 4; выход [1] блока 4 соединен с входами <1> соответствующих блоков 5-1, …, 5-р, …, 5-Nц и входами <2> блоков 10-1, …, 10-р, …, 10-Nц; выход [1] блоков 5-1, …, 5-р, …, 5-Nц соединен с входом <1> блоков 6-1, …, 6-р, …, 6-Nц; выход [2] блоков 5-1, …, 5-р, …, 5-Nц соединен с входом <1> блоков 15-1, …, 15-р, …, 15-Nц; выход [1] блоков 7-1, …, 7-р, …, 7-Nц соединен с входом <1> блоков 8-1, …, 8-р, …, 8-Nц; выход [1] блоков 8-1, …, 8-р, …, 8-Nц соединен с входом <1> блоков 14-1, …, 14-р, …, 14-Nц; выход [1] блоков 9-1, …, 9-р, …, 9-Nц соединен с входом <2> блоков 5-1, …, 5-р, …, 5-Nц; выход [2] блоков 9-1, …, 9-р, …, 9-Nц соединен с входом <1> блоков 10-1, …, 10-р, …, 10-Nц; выход [1] блоков 10-1, …, 10-р, …, 10-Nц соединен с входом <1> блоков 11-1, …, 11-р, …, 11-Nц; выход [1] блоков 11-1, …, 11-р, …, 11-Nц соединен с входом <1> блоков 12-1, …, 12-р, …, 12-Nц; выход [1] блоков 12-1, …, 12-р, …, 12-Nц соединен с входом <1> блоков 13-1, …, 13-р, …, 13-Nц; выход [1] блоков 13-1, …, 13-р, …, 13-Nц соединен с входом <1> блоков 14-1, …, 14-р, …, 14-Nц; выход [1] блоков 14-1, …, 14-р, …, 14-Nц соединен с входами <1>, …,<p>, …, <Nц> блока 16; выход [1] блоков 15-1, …, 15-р, …, 15-Nц соединен с входом <1> блоков 9-1, …, 9-р, …, 9-Nц; выходы [1], …, [p], …, [Nц] блока 16 соединены с входом <1> соответствующих блоков 15-1, …, 15-р, …, 15-Nц.
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ РАДИОЛОКАЦИОННЫМ КОМПЛЕКСОМ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448347C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА ДЛЯ ПОСТРОЕНИЯ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАТОРА | 2004 |
|
RU2274875C2 |
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| US 20080084346 A1, 10.04.2008 | |||
| US 4961074 A, 02.10.1990 | |||
| JP 10170634 A, 26.06.1998. | |||

