Изобретение относится к радиотехнике и может быть использовано в телевизионных, радиотехнических и радиолокационных системах измерения параметров траекторий летательных аппаратов и других системах аналогичного назначения, в которых информация о непосредственно измеряемых координатах объекта сопровождения (дальности, угловых положениях) формируется с помощью соответствующих дискриминаторов.
Известен следящий измеритель - калмановский фильтр для сопровождения цели [1, Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993, стр.92, рис.2.3], [2, Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр.164, рис.4.6], в котором коэффициенты передачи масштабирующего блока в составе следящего измерителя устанавливаются в соответствии с рекуррентными выражениям для m×1 весовой матрицы K(n) калмановского фильтра [1, стр.95; 2, стр.163]:
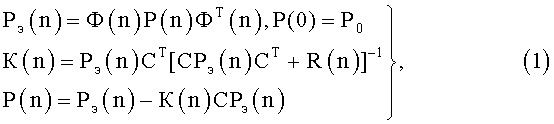
где Ф(n) - m×1 матрица экстраполяции; Pэ(n) и Р(n) - m×1 ковариационные матрицы ошибок экстраполяции и оценивания соответственно; C[1, 0, 0, …] - 1×m матрица-строка наблюдения, показывающая, что из всего вектора состояния непосредственно измеряется только одна координата х1(n); R(n) - ковариационная матрица ошибок измерений, которая при указанной выше матрице наблюдения C представляется скаляром. Здесь m - размерность оцениваемых параметров вектора состояния объекта сопровождения (например, координата и ее производные), «т» - символ транспонирования.
Недостатком следящего измерителя является отсутствие адаптации фильтра сглаживания при неизвестных моментах изменения закона движения объекта слежения, что приводит к расхождению оценок параметров его движения, а соответственно и увеличению ошибок экстраполяции, что при наличии дискриминатора и интенсивном изменении закона движения объекта сопровождения приводит к срыву слежения за счет превышения ошибками слежения (невязками) величин ограниченных линейных участков дискриминаторных характеристик.
Известны также следящий измеритель для сопровождения маневрирующей цели [1, стр.225, рис.4.16], следящий измеритель с корректируемым фильтром [3, Патент РФ №2156477, 07.06.1999], двухдиапазонный следящий измеритель [4, Патент РФ №2181899, 03.04.2000], следящий измеритель с обнаружителем маневра [5, Патент РФ №2253131, 14.01.2004], следящий измеритель с обнаружителем маневра и адаптивной коррекцией прогноза [6, Патент РФ №2296348, 11.04.2005], основу которых составляют α-β фильтры, обнаружители маневра, построенные на основе пороговых устройств, коммутаторы и цепи коррекции значений оценок координат и их производных.
Недостатком вышеуказанных известных устройств является отсутствие учета конечных размеров линейного участка статической характеристики дискриминатора, имеющего место в реальных следящих измерителях, а также необходимость наличия специального обнаружителя маневра, выходные данные которого используются для принятия решений на перестройку структуры следящего измерителя или его параметров.
Наиболее близким к предлагаемому решению по технической сущности и достигаемому эффекту является следящий измеритель с дискриминатором [7, Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. стр.257, рис.16.9].
Следящий измеритель содержит последовательно соединенные дискриминатор, первый масштабирующий блок, первый сумматор, блок задержки, экстраполятор, соединенный выходом с вторым входом первого сумматора, а через второй масштабирующий блок - с вторым входом дискриминатора, первый вход которого является входом устройства.
Масштабирующий блок представляет из себя набор m усилителей с коэффициентами передачи k11(n), k21(n), …, величины которых соответствуют значениям элементов весовой матрицы-столбца K(n)=[k11(n), k21(n), …]т размерности m×1, реализуемой в сглаживающем фильтре следящего измерителя в соответствии с выражениями (1).
Недостатком прототипа является отсутствие адаптации фильтра сглаживания при неизвестных моментах изменения закона движения объекта слежения, что при интенсивном изменении закона движения объекта сопровождения приводит к срыву слежения за счет превышения ошибками слежения (невязками) величин ограниченных линейных участков дискриминаторных характеристик.
Техническим результатом заявляемого технического решения является автоматическое адаптивное управление параметрами следящего измерителя без привлечения специального обнаружителя маневра при интенсивном изменении закона движения объекта слежения.
Это достигается тем, что адаптивный следящий измеритель, содержащий последовательно соединенные дискриминатор, первый масштабирующий блок, первый сумматор, первый блок задержки, экстраполятор и второй масштабирующий блок, выход которого соединен с вторым входом дискриминатора, а вход - с вторым входом первого сумматора, выход которого является выходом устройства, а на его третий вход подаются начальные значения параметров движения сопровождаемого объекта, первый вход дискриминатора является входом устройства, отличается тем, что в него дополнительно введены второй сумматор и последовательно соединенные квадратор, блок усреднения, первый блок умножения, третий сумматор, второй блок задержки, блок хранения, блок деления, второй блок умножения и блок вычитания, соединенный вторым входом с выходом блока хранения и вторым входом второго блока умножения, а выходом - с вторым входом третьего сумматора, выход блока деления подключен к вторым входам первого масштабирующего блока и первого блока умножения, а второй вход - к выходу второго сумматора, на первый вход которого подается код дисперсии ошибок измерений, а второй вход соединен с выходом блока хранения, на второй вход которого подаются коды элементов начальной матрицы ошибок экстраполяции, при этом выход дискриминатора соединен с входом квадратора.
Суть заявляемого устройства поясняется чертежами.
На фиг.1 представлена функциональная схема предлагаемого следящего измерителя;
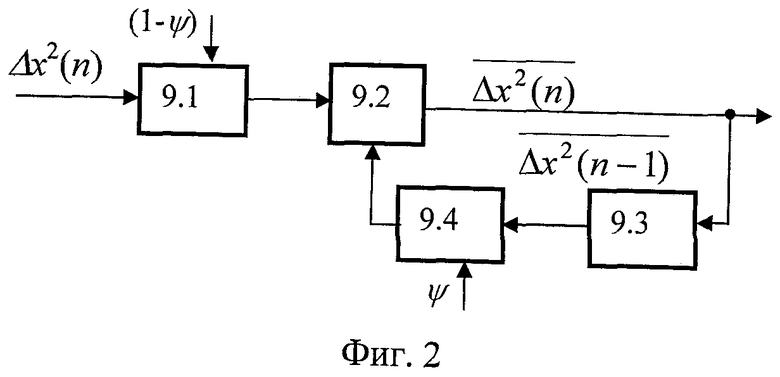
на фиг.2 - функциональная схема блока 11 усреднения;
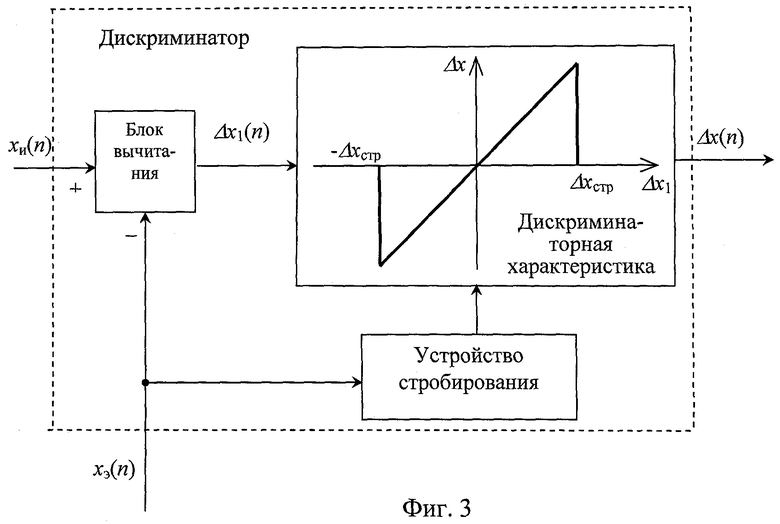
на фиг.3 - функциональная схема дискриминатора 1 с дискриминаторной характеристикой Δx=Δx(Δx1), обусловленной, например, наличием стробов сопровождения величиной ±Δxстр;
на фиг.4, 5 - результаты моделирования работы устройства.
Адаптивный следящий измеритель (фиг.1) содержит последовательно соединенные дискриминатор 1, первый масштабирующий блок 2, первый сумматор 3, первый блок 4 задержки, экстраполятор 5 и второй масштабирующий блок 6, выход которого соединен с вторым входом дискриминатора 1, вход которого является входом устройства. Выход экстраполятора 5 соединен с вторым входом первого сумматора 3, выход которого является выходом устройства, а на третий вход которого подаются начальные значения параметров движения объекта слежения 
Также в состав устройства входят второй сумматор 7 и последовательно соединенные квадратор 8, блок 9 усреднения, первый блок 10 умножения, третий сумматор 11, второй блок 12 задержки, блок 13 хранения, блок 14 деления, второй блок 15 умножения и блок 16 вычитания, соединенный вторым входом с выходом блока 13 хранения и вторым входом второго блока 15 умножения, а выходом - с вторым входом третьего сумматора 11. Выход блока 14 деления подключен к вторым входам первого масштабирующего блока 2 и первого блока 10 умножения, а второй вход - к выходу второго сумматора 7, на первый вход которого подается код дисперсии ошибок измерений, а второй вход соединен с выходом блока 13 хранения, на второй вход которого подаются коды элементов начальной матрицы ошибок экстраполяции. При этом выход дискриминатора 1 соединен с входом квадратора 8.
Адаптивный следящий измеритель работает следующим образом.
На выходе первого сумматора 3 в дискретные моменты времени n с интервалом дискретизации T формируются оценки 

В начальный момент времени t0 на третий вход первого сумматора 3 подаются начальные значения оценок составляющих вектора 



Например, если в следящем измерителе оцениваются параметры линейной траектории, то вектор 

В блоке 6 из всего вектора 
На выходе дискриминатора 1 формируется сигнал Δx(n), который при работе устройства (фиг.3) на линейном участке дискриминаторной характеристики (|Δx1|≤Δxстр) пропорционален измеряемой невязке

где

измеренная координата сопровождаемого объекта, представляемая аддитивной смесью истинной координаты x(n) и ошибки измерений f(n), на практике принятой распределенной по нормальному закону с нулевым математическим ожиданием mj=0 и дисперсией R(n). Цепи нормировки невязки относительно неединичной крутизны дискриминаторной характеристики входят в выходные каскады дискриминатора 1.
Измеренная невязка Δx(n) поступает на входы квадратора 8 и первого масштабирующего блока 2. На выходе первого масштабирующего блока 2 формируются приращения k11(n)Δx(n), k21(n)Δx(n), где k11(n), k21(n), … - соответствующие весовые коэффициенты передачи блока 2 по координате, скорости, и т.д., в зависимости от размерности прогнозируемого вектора состояния объекта, заложенного в следящем измерителе. Данные коэффициенты, поступающие от блока 14 деления, соответствуют элементам весовой матрицы K(n)=[k11(n), k21(n), …]т размерности m×1.
Таким образом, на выходе первого сумматора 3 формируются оценки составляющих вектора состояния объекта (координаты 


Значения весовых коэффициентов усиления k11(n), k21(n), … формируются с помощью блоков устройства 7…16.
Учитывая, что ковариационная матрица PΔx невязки Δх определяется выражением PΔx(n)=CPэ(n)Cт+R(n) [1, стр.95], можно получить выражение для ковариационной матрицы произведения K(n)Δx в виде

Подставляя в (6) второе выражение из (1), а также учитывая свойство симметричности ковариационных матриц PΔx(n) и Рэ(n), получим

Полагая шумы измерения и систему слежения стационарными, для установившегося режима работы можно записать

Отсюда, имеем

Тогда, как это сделано в предлагаемом устройстве, весовую матрицу K(n) можно определять в соответствии с рекуррентными выражениями:

Так, на выходе квадратора 8 формируется сигнал Δx2(n), пропорциональный квадрату измеренной невязки Δx(n). В блоке 9 усреднения формируется сигнал 
В начальный момент времени t0 на второй вход блока 13 хранения подаются начальные значения элементов матрицы Рэ(1), которые используются в первом такте работы устройства. Блок 13 хранения служит для хранения составляющих корреляционной матрицы ошибок экстраполяции Рэ(n), сформированных для следующего такта работы следящего измерителя. С выхода блока 13 хранения значение сигнала pэ11(n) подается на второй вход второго сумматора 7, на первый вход которого поступает сигнал R(n) дисперсии ошибок измерений от внешнего измерителя указанной дисперсии. На выходе второго сумматора 7 формируется сигнал величиной (рэ11(n)+R(n)), который подается на второй вход блока 14 деления.
Также с выхода блока 13 хранения сигналы, пропорциональные первому столбцу (рэ11(n), рэ21(n), …)т матрицы Рэ(n) поступают на первый вход блока 14 деления, а сигналы соответствующие всем элементам матрицы Рэ(n) - на второй вход второго блока 15 умножения.
На выходе блока 14 деления формируются сигналы:

соответствующие элементам весовой матрицы K(n), которые поступают на вторые входы первого масштабирующего блока 2 и первого масштабирующего блока 10.
Второй блок 15 умножения формирует сигналы, соответствующие элементам матрицы K(n)СРэ(n), которая при размерности вектора состояния объекта, например, m=2 имеет вид

На выходе блока 16 вычитания формируются сигналы, соответствующие элементам матрицы Р(n)=Рэ(n)-K(n)СРэ(n). На выходе третьего сумматора 11 формируются сигналы, соответствующие элементам матрицы Рэ(n+1), которые через второй блок 12 задержки на один такт работы устройства (уже в качестве сигналов, соответствующих матрице Рэ(n)) поступают в блок 13 хранения. Далее порядок действий циклически повторяется в каждом новом такте работы устройства.
Сигнал 

где ψ - задаваемый весовой коэффициент. Структура блока 9 усреднения, соответствующая выражению (7) приведена на фиг.2 [8, стр.400, рис.4.19]. Сигнал измеренного квадрата невязки Δх2(n) через первый преобразующий блок 9.1 с коэффициентом передачи (1-ψ) подается на первый вход четвертого сумматора 9.2, на второй вход которого через второй преобразующий блок 9.4 с коэффициентом передачи ψ поступает сигнал 
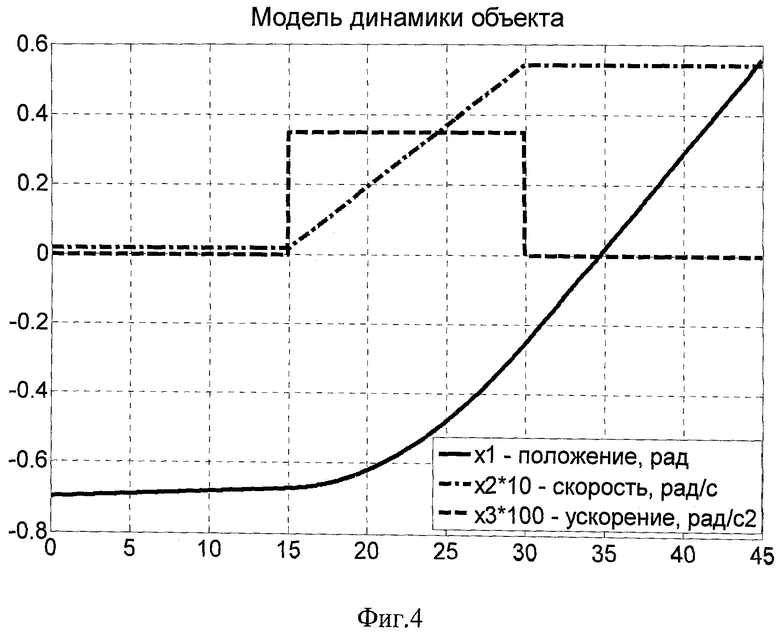
Для подтверждения достижения технического результата заявляемого технического решения было проведено моделирование работы прототипа и предлагаемого устройства в качестве телевизионных следящих измерителей угловых координат объекта. Так как следящие системы по координате х (кадру) и координате y (строке) по структуре одинаковы, было проведено моделирование следящих систем по кадру при условиях t0=0, х(t0)=-0.6981 рад, 

Ввиду неизвестных для следящего измерителя моментов времени начала и окончания маневра, обусловленном ускорением маневра, вектор состояния оцениваемых параметров движения принимался равным вектору оценивания параметров линейной траектории 
Характеристика дискриминатора Δx=Δx(Δx1) определялась размерами полустробов сопровождения Δхстр=0.0070 рад.
Начальные значения элементов ковариационной матрицы ошибок оценивания для прототипа задавались в виде p11(0)=10R; p12(0)=p12(0)=5R; p22(0)=2R/T2. Для предлагаемого устройства начальные значения элементов ковариационной матрицы ошибок экстраполяции Рэ(1) принимали соответственно такие же значения. Графики составляющих модели динамики объекта слежения приведена на фиг.4.
В прототипе коэффициенты передачи весовой матрицы K(n) ограничивались снизу по уровню k11=0.08; k21=0.04.
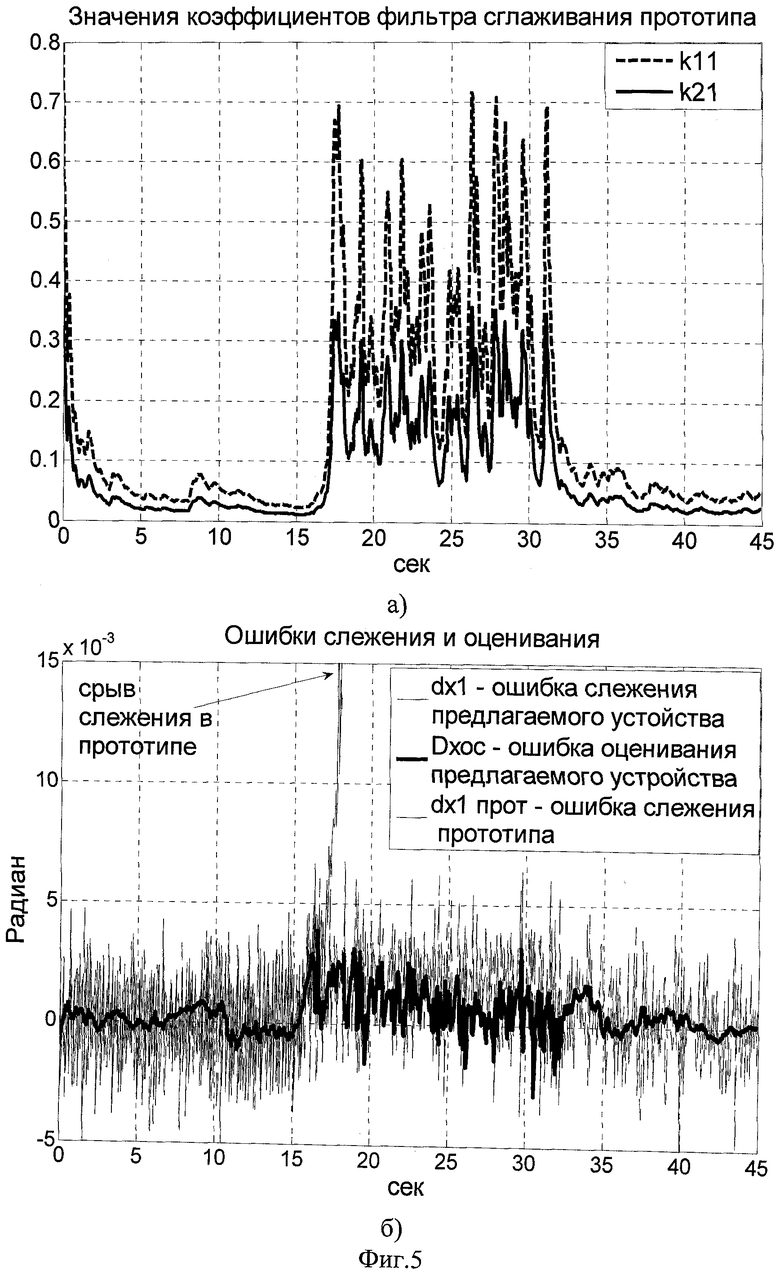
Величина коэффициента ψ в блоке 9 усреднения задавалась равной 0.5. На фиг.5а приведены графики изменения элементов k11(n), k21(n) весовой матрицы K(n), на фиг.5б - графики изменения измеряемых ошибок слежения dx1(n)=Δx1(n)=xи(n)-x1э(n) для предлагаемого устройства и прототипа (dx1прот), а также ошибки оценивания 
После начала маневра цели в прототипе наблюдается срыв слежения, обусловленный превышением динамической составляющей ошибки слежения размеров стробов сопровождения Δxстр [9, Мелешко А.В., Пятков В.В. Методика оценки динамической точности телевизионных следящих систем. Вопросы радиоэлектроники. Серия «Техника телевидения», вып. 2 2009 г. - СПб: ФГУП НИИТ, 2009, с.93-102.]. Для прототипа величина динамической составляющей ошибки слежения достигает величины 
Следовательно, заявляемое устройство позволяет достичь технического результата, заключающегося в автоматическом адаптивном управлении параметрами следящего измерителя без привлечения специального обнаружителя маневра при интенсивном изменении закона движения объекта слежения, что в свою очередь повышает устойчивость сопровождения маневрирующих объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ | 2012 |
|
RU2518685C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571363C2 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
Изобретение относится к радиотехнике и может быть использовано в телевизионных, радиотехнических и радиолокационных системах измерения параметров траекторий летательных аппаратов и других системах аналогичного назначения, в которых информация о непосредственно измеряемых координатах объекта сопровождения (дальности, угловых положениях) формируется с помощью соответствующих дискриминаторов. Достигаемый технический результат изобретения - автоматическое адаптивное управление параметрами следящего измерителя без привлечения специального обнаружителя маневра при интенсивном изменении закона движения объекта слежения. Указанный результат достигается за счет того, что адаптивный следящий измеритель содержит дискриминатор, два масштабирующих блока, три сумматора, два блока задержки, экстраполятор, квадратор, блок усреднения, два блока умножения, блок хранения, блок деления и блок вычитания, определенным образом соединенные между собой. 5 ил.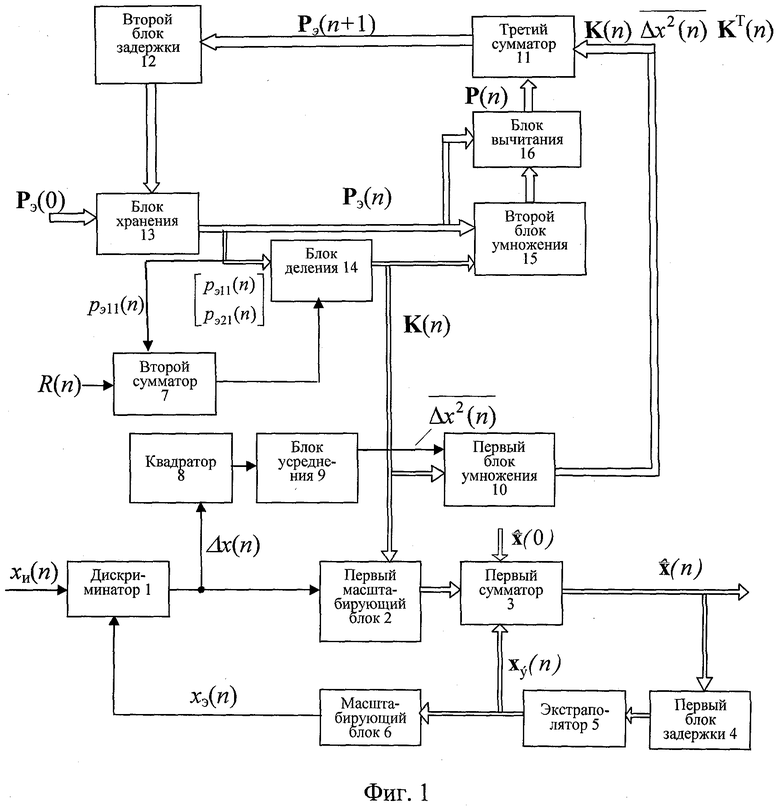
Адаптивный следящий измеритель, содержащий последовательно соединенные дискриминатор, первый масштабирующий блок, первый сумматор, первый блок задержки, экстраполятор и второй масштабирующий блок, выход которого соединен с вторым входом дискриминатора, а вход - с вторым входом первого сумматора, выход которого является выходом устройства, а на его третий вход подаются начальные значения параметров движения объекта слежения, первый вход дискриминатора является входом устройства, отличающийся тем, что в него дополнительно введены второй сумматор и последовательно соединенные квадратор, блок усреднения, первый блок умножения, третий сумматор, второй блок задержки, блок хранения, блок деления, второй блок умножения и блок вычитания, соединенный вторым входом с выходом блока хранения и вторым входом второго блока умножения, а выходом - с вторым входом третьего сумматора, выход блока деления подключен к вторым входам первого масштабирующего блока и первого блока умножения, а второй вход - к выходу второго сумматора, на первый вход которого подается код дисперсии ошибок измерений, а второй вход соединен с выходом блока хранения, на второй вход которого подаются коды элементов начальной матрицы ошибок экстраполяции, при этом выход дискриминатора соединен с входом квадратора.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.257, рис.16.9 | |||
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| US 7327307 B2, 05.02.2008 | |||
| US 5325098 A, 28.05.1994 | |||
| WO 2008105892 A3, 05.02.2009 | |||
| US 7515091 B2, 07.04.2009. | |||

