Изобретение относится к гидроакустическим измерениям и может быть использовано в системах гидроакустической навигации для определения времени распространения гидроакустического сигнала между объектами, разделенными водной средой.
Известен способ определения времени распространения акустического сигнала от судна до подводного объекта [1], основанный на передаче с судна в момент времени t1 акустического импульсного сигнала на подводный объект, с которого при поступлении этого сигнала излучается на судно акустический импульсный эхо-сигнал, в регистрации на судне времени прихода t2 эхо-сигнала. Искомое время распространения определяется разностью t2 и t1.
Недостатком известного способа [1] является недостаточная точность определения времени распространения, связанная с воздействием на передаваемые сигналы помех в водной среде.
Наиболее близким к заявляемому (прототипом) является способ определения времени распространения акустического сигнала между объектами, разделенными водной средой [2], заключающийся в передаче акустического сигнала А с первого объекта на второй, приеме сигнала А на втором объекте, передаче акустического сигнала Б с второго объекта на первый, приеме акустического сигнала Б на первом объекте, измерении момента времени t1, посылки сигнала А с первого объекта и момента времени t2 приема на нем сигнала Б, использовании в качестве акустических сигналов А и Б последовательностей пронумерованных кодовых комбинаций, каждая из которых состоит из кодовых элементов, являющихся акустическими эквивалентами информационных квантов с тактовым периодом Т, в запоминании на первом и втором объектах образов кодовых комбинаций акустических сигналов Б и А соответственно, в предварительном задании и запоминании на первом и втором объектах фиксированного интервала времени TA, большего или равного длительности сигнала А, причем прием акустических сигналов на первом и втором объектах включает определение временных границ периодов Т прихода кодовых элементов с регенерацией внутри указанных периодов Т указанных кодовых элементов, в определении на втором объекте номера К первой из регенерированных кодовых комбинаций акустического сигнала А, полностью совпавшей с ее образом, в введении задержки Tзад, равной разности указанного фиксированного интервала времени TA, и длительности К кодовых комбинаций сигнала А и отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером К сигнала А с ее образом, в посылке с второго объекта на первый сигнала Б по истечении указанной задержки Tзад, в определении на первом объекте номера М регенерированной кодовой комбинации сигнала Б, полностью совпавшей с ее образом, в определении времени распространения акустического сигнала между объектами на момент приема на первом объекте акустического сигнала Б, а именно по моменту полного совпадения указанной регенерированной кодовой комбинации с номером М с ее образом, используя упомянутые значения Т, TA, M.
Известно устройство определения времени распространения акустического сигнала между объектами [2], содержащее на первом объекте (с которого определяется время распространения акустического сигнала между объектами) пусковой блок управления, первые передатчик и приемник акустических сигналов, измеритель временного интервала, генератор прямого сигнала, датчик эталонного эхо-сигнала, первый блок сравнения, первый измеритель положения границ символов, первый регенератор символов и вычислитель, содержащее на втором объекте (до которого определяется время распространения акустического сигнала) вторые передатчик и приемник акустических сигналов, датчик эталонного прямого сигнала, генератор эхо-сигнала, второй блок сравнения, второй измеритель положения границ символов, второй регенератор символов, блок задержки. Причем на первом объекте вход генератора прямого сигнала соединен с входом измерителя временного интервала и подключен к выходу пускового устройства управления, первый выход генератора прямого сигнала подключен к входу первого передатчика акустического сигнала, выход датчика эталонного эхо-сигнала и выход первого регенератора символов подключены к соответствующим первому и второму информационным входам первого блока сравнения, выход которого подключен к второму входу измерителя временного интервала, выход первого приемника акустических сигналов подключен к соединенным вместе входам первого регенератора символов и первого измерителя положения границ символов, выход последнего подключен к соединенным вместе тактовым входам первого регенератора символов, датчика эталонного эхо-сигнала и первого блока сравнения, второй выход генератора прямого сигнала подключен к соединенным вместе управляющим входам датчика эталонного эхо-сигнала и первого блока сравнения, выход последнего вместе выходом измерителя временного интервала и выходом "Номер" датчика эталонного эхо-сигнала подключены к соответствующим первому, второму и третьему входам вычислителя, выход вычислителя служит выходом устройства определения времени распространения акустического сигнала между объектами; на втором объекте выход второго приемника акустических сигналов подключен к соединенным вместе входам второго регенератора символов и второго измерителя положения границ символов, выход последнего подключен к соединенным вместе тактовым входам второго регенератора символов, датчика эталонного прямого сигнала и второго блока сравнения, выход датчика эталонного прямого сигнала и выход второго регенератора символов подключены к соответствующим первому и второму информационным входам второго блока сравнения, выход которого подключен к первому входу блока задержки, второй вход блока задержки подключен к выходу "Номер" датчика эталонного прямого сигнала, выход блока задержки подключен к входу генератора эхо-сигнала, выход которого соединен с входом второго передатчика акустического сигнала.
Работа известного устройства определения времени распространения акустического сигнала между объектами [2] заключается в последовательной реализации следующих операций.
1. Предварительно на первом и втором объектах запоминают образцы кодовых комбинаций акустических сигналов Б и А соответственно, а также продолжительность фиксированного интервала времени TA. Данные о кодовых комбинациях акустического сигнала А закладывают в датчик эталонного сигнала, а о кодовых комбинациях акустического сигнала Б - в датчик эталонного эхо-сигнала. Численное значение продолжительности фиксированного интервала времени ТA закладывают в вычислитель и в блок задержки.
2. Первый и второй объекты произвольным образом размещают в водной среде.
3. В заданный момент времени с первого объекта на второй передают акустический сигнал А, состоящий из последовательности пронумерованных кодовых комбинаций Qi, (i=1,2,3,...., NA), каждая из которых состоит из кодовых элементов ql(1<l≤L) с тактовым периодом Т, являющихся акустическими эквивалентами информационных квантов Рl(в двоичной системе счисления l = 2, Р = 0, P2 = 1) и запоминают момент t1, передачи сигнала А. Для осуществления данной операции в момент времени t1, с пускового блока управления на управляющие входы генератора прямого сигнала и измерителя временного интервала подается соответствующий сигнал запуска; в генераторе прямого сигнала осуществляется формирование сигнала А, который посредством первого передатчика в акустическом виде излучается в водную среду, в направлении второго объекта.
4. На втором объекте с помощью второго приемника акустических сигналов приходящий акустический сигнал А превращается в электрическую форму.
5. Определяют временные границы периодов T прихода кодовых элементов сигнала А на второй объект. Операция осуществляется посредством второго измерителя положения границ символов, который определяет наиболее вероятное положение границ принимаемых кодовых элементов, на выходе второго измерителя положения границ символов в эти моменты формируются соответствующие сигналы.
6. Внутри полученных в результате выполнения операций п.5 границ указанных периодов Т регенерируют кодовые элементы ql посредством второго регенератора символов, управляемого выходными сигналами второго измерителя положения границ символов, на основе поступающих на его информационный вход сигналов с выхода второго приемника акустических сигналов.
7. Сравнивают полученные из регенерированных кодовых элементов кодовые комбинации (регенерированные кодовые комбинации) с их образами, запоминаемыми в процессе операции по п.1. Для этого по каждому выходному сигналу второго измерителя положения символов во второй блок сравнения вводят одновременно очередной регенерированный кодовый элемент из второго регенератора символов и сигналы из датчика эталонного прямого сигнала.
8. В момент полного совпадения первой из последовательности регенерированных кодовых комбинаций с ее образом определяют номер К этой кодовой комбинации, вычисляют время задержки Tзад, отсчитываемое от момента указанного полного совпадения регенерированной кодовой комбинации с номером К сигнала А с ее образом, по истечении указанной задержки Tзад формируют и передают с второго объекта на первый акустический сигнал Б, состоящий, как и сигнал А, из последовательности пронумерованных кодовых комбинаций Qj, (j=1,2,3,...., NБ), каждая из которых состоит из кодовых элементов gl, (1<l≤L) с тактовым периодом Т, являющихся акустическими эквивалентами информационных квантов Рl указанных в п.3. Данная операция осуществляется посредством выработки вторым блоком сравнения управляющего сигнала на блок задержки при полном совпадении регенерированной кодовой комбинации, поступающей с выхода второго регенератора символов, с одним из хранящихся в датчике эталонного прямого сигнала образов, номер К которого поступает из датчика эталонного прямого сигнала на второй управляющий вход блока задержки. В блоке задержки вычисляется время задержки Tзад, равное разности указанного в п.1 фиксированного интервала времени TA(и длительности К кодовых комбинаций сигнала А.
Тзад=ТА-К•nА•Т, (1)
где nA - количество кодовых элементов в одной кодовой комбинации А. Спустя время Тзад, после указанного совпадения в генераторе эхо-сигнала формируется сигнал Б, который посредством второго передатчика излучается в водную среду, в направлении первого объекта.
9. На первом объекте осуществляют операции по приему сигнала Б, определению временных границ периодов Т прихода кодовых сигнала Б на первый объект, регенерации внутри указанных периодов T кодовых элементов и сравнению регенерированных кодовых комбинаций с их образами. Эти операции эквивалентны операциям по пп. 4, 5, 6, 7 и осуществляются посредством аналогичных узлов первого объекта.
10. В момент полного совпадения первой из регенерированных кодовых комбинаций сигнала Б с ее образом определяют номер М этой кодовой комбинации. Операция осуществляется аналогично определению номера К в операции по п. 8. Информация из датчика эталонного эхо-сигнала о номере М поступает при срабатывании первого блока сравнения в вычислитель. Одновременно в вычислитель заводят информацию с измерителя временного интервала о разнице
Δt=t2-t1, (2)
где t1 - момент посылки сигнала А;
t2 - момент срабатывания первого блока сравнения.
На основе Δt, T, M и ТА определяют время распространения акустического сигнала между первым и вторым объектами τ из выражения:
τ = 0,5(Δt-TA-M•nБ-T), (3)
где nБ - количество кодовых элементов в кодовых комбинациях сигнала Б. Операция осуществляется вычислителем.
Недостатком известных решений способа и устройства являются ограниченные функциональные возможности, выражающиеся в недостаточной точности определения времени распространения акустического сигнала между объектами.
В известных решениях [2] погрешность определения времени распространения акустического сигнала между объектами Δτ зависит от погрешностей ΔT определения временных границ периодов T прихода кодовых элементов сигнала А и сигнала Б на второй и первый объекты соответственно.
При передаче через водную среду на акустические сигналы А и Б действуют помехи, которые искажают форму принимаемых кодовых элементов; в частности, вследствие действия помех происходят флюктуации временных границ кодовых элементов. Прием сигналов А и Б на втором и первом объектах соответственно предполагает определение временных границ периодов Т прихода кодовых элементов, составляющих эти сигналы. Определение временных границ периодов T прихода кодовых элементов является статистической операцией, в процессе выполнения которой осуществляется усреднение флюктуирующих моментов прихода кодовых элементов соответствующих акустических сигналов. В качестве границ периодов Т прихода кодовых элементов принимаются моменты времени, соответствующие математическому ожиданию положения этих границ a(T0).
Внутри полученных границ указанных периодов Т регенерируют кодовые элементы. Сравнивают полученные из регенерированных кодовых элементов кодовые комбинации (регенерированные кодовые комбинации) с их образами. В момент полного совпадения регенерированной кодовой комбинации с ее образом соответствующий акустический сигнал (А или Б) считается принятым.
Операция определения временных границ периодов T прихода кодовых элементов начинается с момента прихода на объект соответствующего сигнала (на второй объект - сигнала А, а на первый объект - сигнала Б) и длится до момента полного совпадения регенерированной кодовой комбинации с се образом. Соответствующий момент времени фиксируется и учитывается при выполнении последующих операций: например, на втором объекте от момента полного совпадения регенерированной кодовой комбинации сигнала А с ее образом отсчитывается время задержки Тзад, по истечении которого формируют и передают с второго объекта на первый акустический сигнал Б, а на первом объекте момент совпадения регенерированной кодовой комбинации сигнала Б с ее образом определяет окончание промежутка времени Δt между посылкой с первого объекта сигнала А и получением на нем ответного сигнала Б, величина указанного промежутка времени Δt используется для расчета по формуле (3) времени распространения сигнала между объектами τ.
При этом на втором объекте в качестве оценки  математического ожидания положения границ аА (T0) периодов Т прихода кодовых элементов сигнала А принимаются величина
математического ожидания положения границ аА (T0) периодов Т прихода кодовых элементов сигнала А принимаются величина
где Ti - истинное положение границ i -го кодового элемента сигнала А;
K•nA•T - длительность К кодовых комбинаций сигнала А (K - номер регенерированной кодовой комбинации сигнала А, полностью совпавшей с ее образом); на втором объекте в качестве оценки  математического ожидания положения границ аБ(Т0) периодов T прихода кодовых элементов принимаются величина
математического ожидания положения границ аБ(Т0) периодов T прихода кодовых элементов принимаются величина
где Тi - истинное положение границ i -го кодового элемента сигнала Б;
M•nБ•T - длительность M кодовых комбинаций сигнала Б (М- номер регенерированной кодовой комбинации сигнала Б, полностью совпавшей с ее образом).
Погрешности определения временных границ периодов Т прихода кодовых элементов на первом ΔБ и втором ΔA объектах оцениваются значениями: (6а)
(6а) (6б)
(6б)
Полагая, что эти погрешности не коррелированны, несложно показать, что погрешность расчета по формуле (3) времени распространения сигнала между объектами σ(τ) оценивается величиной:
σ(τ) = σ[0,5(Δt-TA-M•T•n2)]≤ΔБ+ΔA. (7)
Известно [3], что усреднение по формулам (4) и (5) должно производиться в интервале, задаваемом верхним пределом интегрирования, стремящимся к бесконечности. На конечном интервале усреднения степень соответствия оценки  математического ожидания положения границ периодов своему истинному значению а(Т0) возрастает с увеличением длительности этого интервала.
математического ожидания положения границ периодов своему истинному значению а(Т0) возрастает с увеличением длительности этого интервала.
В известных решениях способа и устройства определения времени распространения гидроакустического сигнала между объектами [2] сигналы А и Б считаются принятыми на втором и первом объектах соответственно, когда фиксируется первое полное совпадение регенерированной кодовой комбинации соответствующего сигнала с ее образом; причем факт приема определяется по первому указанному совпадению регенерированной кодовой комбинации соответствующего сигнала с ее образом. Поэтому, чем меньше номер принятой кодовой комбинации, тем, в среднем, в большей мере отличаются оценки  математического ожидания положения границ периодов Т прихода кодовых элементов сигналов от своего истинного значения а(Т0), следовательно, тем больше погрешность начала отсчета на втором объекте вычисляемого по формуле (1) времени задержки Tзад спустя которое с второго объекта на первый передается сигнал Б, и больше погрешность определения момента времени t2 приема на первом объекте сигнал Б.
математического ожидания положения границ периодов Т прихода кодовых элементов сигналов от своего истинного значения а(Т0), следовательно, тем больше погрешность начала отсчета на втором объекте вычисляемого по формуле (1) времени задержки Tзад спустя которое с второго объекта на первый передается сигнал Б, и больше погрешность определения момента времени t2 приема на первом объекте сигнал Б.
Увеличение погрешности момента передачи с второго объекта на первый сигнала Б и погрешности определения момента времени t2 приема на первом объекте сигнал Б в конечном счете приводит к увеличению погрешности определения по формуле (3) времени распространения акустического сигнала τ между объектами.
Целью предлагаемого изобретения является повышение точности определения времени распространения акустического сигнала между объектами.
Поставленная цель достигается тем, что в способе определения времени распространения акустического сигнала между объектами, разделенными водной средой, заключающемся в передаче акустического сигнала А с первого объекта на второй, приеме сигнала А на втором объекте, в передаче акустического сигнала Б с второго объекта на первый, приеме акустического сигнала Б на первом объекте, в измерении момента времени t1 посылки сигнала А с первого объекта, в использовании в качестве акустических сигналов А и Б последовательностей пронумерованных кодовых комбинаций, каждая из которых состоит из кодовых элементов, являющихся акустическими эквивалентами информационных квантов с тактовым периодом Т, в запоминании на первом и втором объектах образов кодовых комбинаций акустических сигналов Б и А соответственно в предварительном задании и запоминании на первом и втором объектах фиксированного интервала времени TA большего или равного длительности сигнала А, причем прием акустических сигналов на первом и втором объектах включает определение временных границ периодов Т прихода кодовых элементов с регенерацией внутри этих периодов Т указанных кодовых элементов, в определении на втором объекте номера К первой из последовательности регенерированных кодовых комбинаций акустического сигнала А, полностью совпавшей с ее образом, в введении задержки Tзад.1, равной разности указанного фиксированного интервала времени ТА и длительности К кодовых комбинаций сигнала А и отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером К сигнала А с ее образом, в посылке с второго объекта на первый сигнала Б по истечении указанной задержки Тзад.1 в определении на первом объекте номера М первой из последовательности регенерированных кодовых комбинаций сигнала Б, полностью совпавшей с ее образом, предварительно задают и запоминают на первом объекте фиксированный интервал времени ТБ больший или равный длительности сигнала Б, после определения на втором объекте номера К первой из регенерированных кодовых комбинаций акустического сигнала А, полностью совпавшей с ее образом, и введения задержки Тзад.1, равной разности указанного фиксированного интервала времени ТА и длительности К кодовых комбинаций сигнала А и отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером К сигнала А с ее образом, продолжают прием сигнала А до его окончания и последовательно определяют номера Кi всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами, уточняют по каждому последующему из указанных совпадений длительность упомянутой задержки Тзад.1, принимая в качестве новой, уточненной длительности указанной задержки Тзад.1, отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером Кi сигнала А с ее образом, соответствующую величину разности указанного фиксированного интервала времени ТA и длительности Кi, кодовых комбинаций сигнала А, после определения на первом объекте номера M первой из регенерированных кодовых комбинаций сигнала Б, полностью совпавшей с ее образом, вводят задержку Тзад.2, равную разности указанного фиксированного интервала времени ТБ и длительности М кодовых комбинаций сигнала Б и отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером М сигнала Б с ее образом, продолжают прием сигнала Б до его окончания и последовательно определяют номера Мi, всех регенерированных кодовых комбинаций акустического сигнала Б, полностью совпавших с их образами, уточняют по каждому последующему из указанных совпадений длительность упомянутой задержки Тзад.2, принимая в качестве новой, уточненной длительности указанной задержки Тзад.2, отсчитываемой от момента указанного соответствующего полного совпадения регенерированной кодовой комбинации с номером Мi сигнала Б с ее образом, величину разности указанного фиксированного интервала времени ТБ и длительности Мi кодовых комбинаций сигнала Б, определяют на первом объекте момент времени t2, по моменту окончания указанной задержки Тзад.2, определяют время распространения акустического сигнала между объектами τ, используя указанные значения моментов времени t1, t2 и длительности фиксированных интервалов времени ТA, ТБ. При этом в устройстве определения времени распространения акустического сигнала между объектами, содержащем на первом объекте (с которого определяется время распространения акустического сигнала между объектами) пусковой блок управления, первые передатчик и приемник акустических сигналов, измеритель временного интервала, генератор прямого сигнала, датчик эталонного эхо-сигнала, первый блок сравнения, первый измеритель положения границ символов, первый регенератор символов и вычислитель, содержащем на втором объекте (до которого определяется время распространения акустического сигнала) вторые приемник и передатчик акустических сигналов, датчик эталонного прямого сигнала, второй блок сравнения, генератор эхо-сигнала, второй измеритель положения границ символов, второй регенератор символов, первый блок задержки, дополнительно введен в состав первого объекта второй блок задержки.
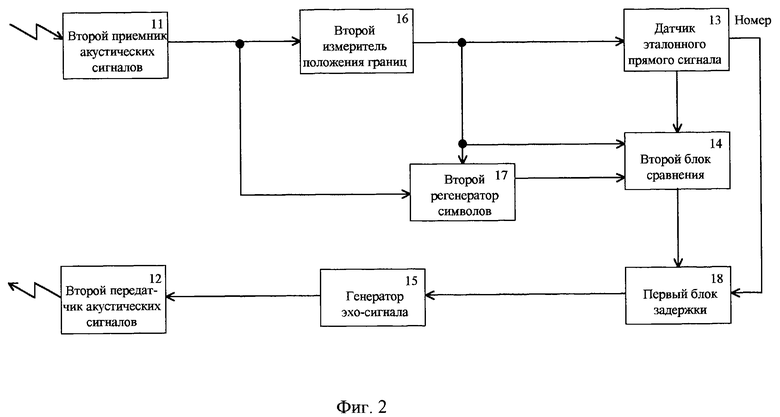
Предлагаемое изобретение поясняется примером конкретного выполнения, где на фиг.1 показана схема первого объекта (с которого определяется время распространения акустического сигнала между объектами), на фиг.2 - схема второго объекта (до которого определяется время распространения акустического сигнала с первого объекта).
Первый объект, который находится, например, на поверхности водного бассейна, содержит (см. фиг.1) пусковой блок управления 1, первые передатчик 2 и приемник 3 акустических сигналов, измеритель временного интервала 4, генератор прямого сигнала 5, датчик эталонного эхо-сигнала 6, первый блок сравнения 7, первый измеритель положения границ символов 8, первый регенератор символов 9, вычислитель 10 и второй блок задержки 19. Вход генератора прямого сигнала 5 соединен с первым управляющим входом измерителя временного интервала 4 и подключен к выходу пускового устройства управления 1, выход измерителя временного интервала 4 подключен к первому входу вычислителя 10, первый выход генератора прямого сигнала 5 подключен к входу первого передатчика акустического сигнала 2.
Выход датчика эталонного эхо-сигнала 6 и выход первого регенератора символов 9 подключены к соответствующим первому и второму информационным входам первого блока сравнения 7, выход первого приемника акустических сигналов 3 подключен к соединенным вместе входам первого регенератора символов 9 и первого измерителя положения границ символов 8, выход последнего подключен к соединенным вместе тактовым входам первого регенератора символов 9, датчика эталонного эхо-сигнала 6 и первого блока сравнения 7, второй выход генератора прямого сигнала 5 подключен к соединенным вместе первым управляющим входам датчика эталонного эхо-сигнала 6 и первого блока сравнения 7, выход последнего вместе выходом "Номер" датчика эталонного эхо-сигнала 6 подключены к соответствующим первому, второму входам второго блока задержки 19, к выходу которого подключены соединенные вместе второй вход вычислителя 10 и вторые управляющие входы измерителя временного интервала 4, датчика эталонного эхо-сигнала 6 и первого блока сравнения 7, выход вычислителя 10 является выходом устройства определения времени распространения акустического сигнала между объектами.
Второй объект, который находится, например, под водой, содержит (см. фиг. 2) вторые приемник 11 и передатчик 12 акустических сигналов, датчик эталонного прямого сигнала 13, второй блок сравнения 14, генератор эхо-сигнала 15, второй измеритель положения границ символов 16, второй регенератор символов 17, первый блок задержки 18. Выход второго приемника акустических сигналов 11 подключен к соединенным вместе входам второго регенератора символов 17 и второго измерителя положения границ символов 16, выход последнего подключен к соединенным вместе тактовым входам второго регенератора символов 17, датчика эталонного прямого сигнала 13 и второго блока сравнения 14, выход датчика эталонного прямого сигнала 13 и выход второго регенератора символов 17 подключены к соответствующим первому и второму информационным входам второго блока сравнения 14, выход которого подключен к первому входу блока задержки 18, второй вход блока задержки 18 подключен к выходу "Номер" датчика эталонного прямого сигнала 13, выход блока задержки 18 подключен к входу генератора эхо-сигнала 15, выход которого соединен с входом второго передатчика акустического сигнала 12.
Работа устройства заключается в последовательной реализации следующих операций.
1. Предварительно на первом и втором объектах запоминают образцы кодовых комбинаций гидроакустических сигналов Б и А соответственно, задают и запоминают на первом и втором объектах фиксированный интервал времени ТА, больший или равный длительности сигнала А, запоминают на первом объекте фиксированный интервал времени ТБ, больший или равный длительности сигнала Б. Данные о кодовых гидроакустического сигнала А закладывают в датчик эталонного прямого сигнала 13, а о кодовых комбинациях гидроакустического сигнала Б - в датчик эталонного эхо-сигнала 6. Численное значение продолжительности фиксированного интервала времени ТА закладывают в вычислитель 10 и первый блок задержки 18; численное значение продолжительности фиксированного интервала времени TБ закладывают в вычислитель 10 и во второй блок задержки 19.
2. Первый и второй объекты произвольным образом размещают в водной среде; например, первый объект размещают на поверхности, на судне, а второй опускают на дно бассейна.
3. В заданный момент времени с первого объекта на второй передают гидроакустический сигнал А, состоящий из последовательности пронумерованных кодовых комбинаций Q1, (i=1,2,3,....,NA), каждая из которых состоит из кодовых элементов gl, (1<l≤L) с тактовым периодом T, являющихся акустическими эквивалентами информационных квантов Pl (в двоичной системе счисления l=2, P1=0, Р2= 1) и запоминают момент t1, передачи сигнала А. Для осуществления данной операции в момент времени t1 с пускового блока управления 1 на управляющие входы генератора прямого сигнала 5 и измерителя временного интервала 4 подается соответствующий сигнал запуска; в генераторе прямого сигнала 5 осуществляется формирование сигнала А, который посредством первого передатчика 2 в акустическом виде излучается в водную среду, в направлении второго объекта. Одновременно сигналом с второго выхода генератора прямого сигнала 5, поступающим на соединенные вместе первые управляющие входы датчика эталонного эхо-сигнала 6 и первого блока сравнения 7 первый объект подготавливается к приему эхо-сигнала с второго объекта.
4. На втором объекте с помощью второго приемника акустических сигналов приходящий акустический сигнал А превращается в электрическую форму. Операция осуществляется посредством приемника акустических сигналов 11.
5. Определяют временные границы периодов T прихода кодовых элементов сигнала А на второй объект. Операция осуществляется посредством второго измерителя положения границ символов 16, который определяет наиболее вероятное положение границ принимаемых кодовых элементов, на выходе второго измерителя положения границ символов 16 в эти моменты формируются соответствующие сигналы.
6. Внутри полученных в результате выполнения операций п.5 границ указанных периодов Т регенерируют кодовые элементы ql посредством второго регенератора символов 17, управляемого выходными сигналами второго измерителя положения границ символов 16, на основе поступающих на его информационный вход сигналов с выхода второго приемника акустических сигналов 11.
7. Сравнивают полученные из регенерированных кодовых элементов кодовые комбинации (регенерированные кодовые комбинации) с их образами, запоминаемыми в процессе операции по п.1. Для этого по каждому выходному сигналу второго измерителя положения символов 16 во второй блок сравнения 14 вводят одновременно очередной регенерированный кодовый элемент из второго регенератора символов 17 и сигналы из датчика эталонного прямого сигнала 13.
8. В момент полного совпадения первой из последовательности регенерированных кодовых комбинаций сигнала А с ее образом определяют номер К этой кодовой комбинации, вводят задержку Tзад.1, равную разности указанного фиксированного интервала времени ТА и длительности К кодовых комбинаций сигнала А, продолжают прием сигнала А до его окончания и последовательно определяют номера Кi всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами, уточняют по каждому последующему из указанных совпадений длительность упомянутой задержки Тзад.1, принимая в качестве новой, уточненной длительности указанной задержки Тзад.1, отсчитываемой от момента указанного полного совпадения регенерированной кодовой комбинации с номером Кi сигнала А с ее образом, соответствующую величину разности указанного фиксированного интервала времени ТА, и длительности Кi кодовых комбинаций сигнала А,
Тзад.1=ТА-Ki•nА•T. (8)
Данная операция осуществляется посредством выработки вторым блоком сравнения 14 управляющего сигнала на первый блок задержки 18 при каждом полном совпадении регенерированной кодовой комбинации сигнала А, поступающей с выхода второго регенератора символов 17, с одним из хранящихся в датчике эталонного прямого сигнала 13 образов, номер Кi которого поступает на второй управляющий вход первого блока задержки 18. В первом блоке задержки 18 согласно выражению (8) вычисляется время задержки Тзад1, равное разности указанного в п.1 фиксированного интервала времени ТА и длительности Кi кодовых комбинаций сигнала А.
9. Спустя время задержки Тзад1, после указанного последнего полного совпадения регенерированной кодовой комбинации сигнала А с ее образом формируют и передают с второго объекта на первый акустический сигнал Б, состоящий, как и сигнал А, из последовательности пронумерованных кодовых комбинаций Qj, (j= 1,2,3,...NБ), каждая из которых состоит из кодовых элементов ql(1<l≤L) с тактовым периодом Т, являющихся акустическими эквивалентами информационных квантов Pl, указанных в п.3. Данные операции осуществляются по выходному сигналу первого блока задержки 18 посредством генератора эхо-сигнала 15 второго передатчика акустических сигналов 12.
10. На первом объекте осуществляют операции по приему сигнала Б, определению временных границ периодов Т прихода кодовых сигнала Б на первый объект, регенерации внутри указанных периодов Т кодовых элементов и сравнению регенерированных кодовых комбинаций сигнала Б с их образами. Эти операции эквивалентны операциям по пп. 4, 5, 6, 7 и осуществляются посредством аналогичных узлов первого объекта.
11. В момент полного совпадения первой из последовательности регенерированных кодовых комбинаций сигнала Б с ее образом определяют номер М этой кодовой комбинации, вводят задержку Tзад.2, равную разности указанного фиксированного интервала времени ТБ и длительности М кодовых комбинаций сигнала Б, продолжают прием сигнала Б до его окончания и последовательно определяют номера Мi всех регенерированных кодовых комбинаций акустического сигнала Б, полностью совпавших с их образами, уточняют по каждому последующему из указанных совпадений длительность упомянутой задержки Тзад.2, принимая в качестве новой, уточненной длительности указанной задержки Тзад.2, отсчитываемой от момента указанного соответствующего полного совпадения регенерированной кодовой комбинации с номером Мi, сигнала Б с ее образом, величину разности указанного фиксированного интервала времени ТБ и длительности Mi кодовых комбинаций сигнала Б,
Тзад.2=ТА-Мi•nБ•Т. (9)
Данная операция осуществляется посредством выработки первым блоком сравнения 7 управляющего сигнала на второй блок задержки 19 при каждом полном совпадении регенерированной кодовой комбинации сигнала Б, поступающей с выхода первого регенератора символов 9, с одним из хранящихся в датчике эталонного эхо-сигнала 6 образов, номер Mi которого поступает на второй управляющий вход второго блока задержки 19. Во втором блоке задержки 19 согласно выражению (9) вычисляется время задержки Тзад.2, равное разности указанного в п.1 фиксированного интервала времени ТБ и длительности Мi кодовых комбинаций сигнала Б.
12. Спустя время задержки Тзад.2 после указанного последнего полного совпадения регенерированной кодовой комбинации сигнала Б с ее образом определяют на первом объекте момент времени t2, соответствующий окончанию указанной задержки Tзад2. Данная операция выполняется по выходному сигналу второго блока задержки 19, по которому в вычислитель 10 вводят информацию из измерителя временного интервала 4 о разнице
Δt=t2-t1, (10)
где t1 - момент посылки с первого объекта на второй сигнала А;
одновременно выходным сигналом второго блока задержки 19, поступающим на соединенные вместе вторые управляющие входы датчика эталонного эхо-сигнала 6, первого блока сравнения 7 и измерителя временного интервала 4, осуществляется выключение указанных блоков.
13. Определяют время распространения акустического сигнала между объектами τ на основе указанного в п.11 временного интервала Δt и указанных в п.1 длительностей фиксированных интервалов времени ТА, ТБ из соотношения:
τ = 0,5(Δt-TA-TБ). (11)
Операция осуществляется вычислителем 10, например программным способом. Результат выдается на выход устройства.
Блоки, входящие в состав заявляемого устройства, известны в технике. Для его реализации могут быть использованы соответствующие блоки из устройства прототипа.
Такое выполнение способа и устройства позволяет расширить их функциональные возможности и повысить точность определения времени распространения акустического сигнала между объектами за счет повышения точности оценки математического ожидания положения границ периодов T прихода кодовых элементов сигнала А и сигнала Б на втором и первом объектах соответственно.
Указанный положительный результат достигается также в случаях, когда составляющие акустические сигналы А и Б, пронумерованные кодовые комбинации Qi, (i= 1,2,3...NA) и Qj, (j=1,2,3...NБ) соответственно состоят из неодинаковых кодовых элементов, например из элементов qlA, (1<lA≤LA) и qlБ, (1<lБ≤LБ), представленных в разных системах счисления, а также, когда составляющие кодовые комбинации акустических сигналов А и Б - кодовые элементы, являющихся акустическими эквивалентами информационных квантов, имеют неодинаковые тактовые периоды, например TqA и ТqБ соответственно, другими словами, когда скорости передачи сигналов А и Б различны.
Источники информации
1. Митько В.Б. и др. Гидроакустические средства связи и наблюдения. - Л. : Судостроение, 1982.
2. Патент РФ 1838801. Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство для его осуществления / Криволапов Г.И Гавриленко B.C., Шеин Б.Н., приоритет от 30.05.1991.
3. Теория электрической связи: Учебник для вузов / А.Г. Зюко, Д.Д. Кловский, В. И. Коржик, М. В. Назаров; Под ред. Д.Д. Кловского. - М.: Радио и связь, 1998.
Изобретение относится к гидроакустическим измерениям и может быть использовано в системах гидроакустической навигации для определения времени распространения гидроакустического сигнала между объектами, разделенными водной средой. Достигаемым техническим результатом является повышение точности определения времени распространения акустического сигнала между объектами, разделенными водной средой. Изобретение заключается в передаче акустического сигнала А с первого объекта на второй, приеме сигнала А на втором объекте, в передаче акустического сигнала Б со второго объекта на первый, приеме акустического сигнала Б на первом объекте, в измерении момента времени ti посылки сигнала А с первого объекта, в исполнении в качестве акустических сигналов А и Б последовательностей пронумерованных кодовых комбинаций, каждая из которых состоит из кодовых элементов, являющихся акустическими эквивалентами информационных квантов с тактовым периодом Т. Сущность заявленного изобретения заключается в том, что точность определения времени распространения акустического сигнала между объектами обеспечивается за счет повышения точности оценки границ периодов Т прихода кодовых элементов сигнала А и сигнала Б на втором и первом объектах соответственно. 2 с. и 2 з.п. ф-лы, 2 ил.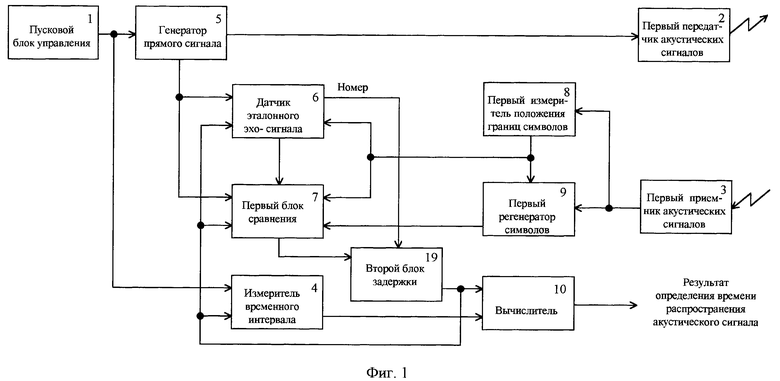
| Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство для его осуществления | 1991 |
|
SU1838801A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ПОСРЕДСТВОМ УЛЬТРАЗВУКА | 1992 |
|
RU2107927C1 |
| US 4453223, 05.06.1984 | |||
| US 4975889, 04.12.1990 | |||
| US 5214617 A, 25.03.1993. | |||

