Изобретение относится к области гидроакустической связи, управления и навигации и может быть использовано для определения времени распространения акустического сигнала между объектами, разделенными водной средой, осуществляющими информационный обмен сигналами командного управления по системе «запрос-ответ».
Известен способ [1] определения времени распространения акустического сигнала между подводными объектами, заключающийся в передаче в момент времени t1 с первого объекта на второй акустического сигнала А, представленного последовательностью из L пронумерованных кодовых комбинаций, составленных из кодовых символов sa, следующих с периодом Та, в приеме сигнала А на втором объекте, в передаче со второго объекта на первый акустического сигнала Б, представленного последовательностью из М пронумерованных кодовых комбинаций, составленных из кодовых символов sб, следующих с периодом Тб, в приеме акустического сигнала Б на первом объекте, в предварительном запоминании на первом и втором объектах образов кодовых комбинаций акустических сигналов Б и А, соответственно, в предварительном задании и запоминании на первом и втором объектах фиксированного интервала времени ТА, большего или равного длительности сигнала А, соответствующего промежутку времени от момента поступления на второй объект сигнала А до его окончания и передачи на первый объект сигнала Б, в предварительном задании и запоминании на первом объекте фиксированного интервала времени ТБ, большего или равного длительности сигнала Б, соответствующего промежутку времени от момента поступления на первый объект сигнала Б до его окончания и получения величины искомого времени распространения акустического сигнала между объектами, при этом прием акустических сигналов на первом и втором объектах включает в себя определение границ периодов Та и Тб кодовых символов sa и sб, соответствующих математическим ожиданиям их положения, регенерацию внутри этих периодов кодовых символов sa и sб соответственно, в определении на втором объекте номера  первой из последовательности регенерированных кодовых комбинаций сигнала А, полностью совпавшей с ее образом, в введении до передачи сигнала Б на первый объект задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности кодовых комбинаций сигнала А, отсчитываемой от момента полного совпадения кодовой комбинации с номером , в продолжении приема сигнала А до его окончания и последовательном определении номеров
первой из последовательности регенерированных кодовых комбинаций сигнала А, полностью совпавшей с ее образом, в введении до передачи сигнала Б на первый объект задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности кодовых комбинаций сигнала А, отсчитываемой от момента полного совпадения кодовой комбинации с номером , в продолжении приема сигнала А до его окончания и последовательном определении номеров  всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами, уточнении по каждому последующему совпадению задержки Тзад.1, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером , сигнала А с ее образом, соответствующей величине разности фиксированного интервала времени ТА и длительности , кодовой комбинации сигнала А, в передаче со второго объекта на первый сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой из последовательности регенерированных кодовых комбинаций сигнала Б, полностью совпавшей с ее образом, во введении до окончания приема сигнала Б задержки Тзад.2, Равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером m сигнала Б с ее образом, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mj всех регенерированных кодовых комбинаций сигнала Б, полностью совпавших с их образами, в уточнении по каждому последующему совпадению задержки Тзад.2, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером mi сигнала Б с ее образом, равной величине разности фиксированного интервала времени ТБ и длительности тi кодовой комбинации сигнала Б, в определении на первом объекте по величине задержки Тзад.2 времени t2, в расчете времени распространения τ акустического сигнала между объектами по формуле:
всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами, уточнении по каждому последующему совпадению задержки Тзад.1, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером , сигнала А с ее образом, соответствующей величине разности фиксированного интервала времени ТА и длительности , кодовой комбинации сигнала А, в передаче со второго объекта на первый сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой из последовательности регенерированных кодовых комбинаций сигнала Б, полностью совпавшей с ее образом, во введении до окончания приема сигнала Б задержки Тзад.2, Равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером m сигнала Б с ее образом, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mj всех регенерированных кодовых комбинаций сигнала Б, полностью совпавших с их образами, в уточнении по каждому последующему совпадению задержки Тзад.2, отсчитываемой от момента полного совпадения регенерированной кодовой комбинации с номером mi сигнала Б с ее образом, равной величине разности фиксированного интервала времени ТБ и длительности тi кодовой комбинации сигнала Б, в определении на первом объекте по величине задержки Тзад.2 времени t2, в расчете времени распространения τ акустического сигнала между объектами по формуле:

Известно устройство [1] определения времени распространения акустического сигнала между подводными объектами, содержащее на первом объекте, где осуществляется определение времени распространения акустического сигнала, блок управления, первые передатчик и приемник акустических сигналов, измеритель временного интервала, генератор сигнала А, генератор эталонного сигнала Б, первый блок сравнения, первый блок задержки, первый измеритель границ кодовых символов, первый регенератор кодовых символов, вычислитель, выход блока управления подключен к первому управляющему входу измерителя временного интервала и входу генератора сигнала А, первый выход которого соединен со входом первого передатчика акустических сигналов, второй выход генератора сигнала А подключен к соединенным вместе первым управляющим входам генератора эталонного сигнала Б и первого блока сравнения, выход измерителя временного интервала соединен с первым входом первого вычислителя, первый выход генератора эталонного сигнала Б и выход первого регенератора кодовых символов подключены к соответствующим первому и второму информационным входам первого блока сравнения, выход первого приемника акустических сигналов подключен к соединенным вместе входам первого регенератора кодовых символов и первого измерителя границ кодовых символов, выход последнего подключен к соединенным вместе тактовым входам первого регенератора кодовых символов, генератора эталонного сигнала Б и первого блока сравнения, выход первого блока сравнения подключен к первому входу первого блока задержки, выход первого блока задержки подключен к соединенным вместе вторым управляющим входам измерителя временного интервала, генератора эталонного сигнала Б, первого блока сравнения и второму входу вычислителя, выход которого служит выходом устройства, второй выход генератора эталонного сигнала Б подключен к второму входу первого блока задержки, содержащее на втором объекте, до которого осуществляется определение времени распространения акустического сигнала, вторые приемник и передатчик акустических сигналов, второй измеритель границ кодовых символов, второй регенератор кодовых символов, генератор эталонного сигнала А, второй блок сравнения, генератор сигнала Б, второй блок задержки, выход второго приемника акустических сигналов соединен со входами второго измерителя границ кодовых символов и второго регенератора кодовых символов, выход второго измерителя границ кодовых символов подключен к соединенным вместе тактовым входам второго регенератора кодовых символов, генератора эталонного сигнала А и второго блока сравнения, выход которого подключен к первому входу второго блока задержки, второй выход последнего соединен с первым входом генератора эталонного сигнала А, выход второго блока сравнения подключен к первому входу второго блока задержки, второй вход которого соединен со вторым выходом генератора эталонного сигнала А, выход второго блока задержки соединен со входом генератора эталонного сигнала А, выход которого подключен ко входу второго передатчика акустических сигналов.
Работа известного устройства [1] заключается в последовательной реализации следующих действий и операций.
1. На первом и втором объектах предварительно задают и запоминают: образы кодовых комбинаций гидроакустических сигналов А и Б, фиксированный интервал времени ТА, равный или больший длительности сигнала А и равный промежутку времени от момента прихода на второй объект сигнала А до окончания его приема и передачи на первый объект сигнала Б. Данные о кодовых комбинациях сигнала А закладывают в генераторы сигнала А и эталонного сигнала А, а о кодовых комбинациях сигнала Б - в генераторы сигнала Б и эталонного сигнала Б.
Задают и запоминают на первом объекте фиксированный интервал времени ТБ, равный или больший длительности сигнала Б и равный промежутку времени от момента прихода на первый объект сигнала Б до окончания его приема и получения (вычисления) величины искомого времени распространения τ акустического сигнала между объектами.
Значения фиксированного интервала времени ТА закладывают в вычислитель и второй блок задержки, а фиксированного интервала времени ТБ закладывают в вычислитель и в первый блок задержки.
2. Оборудование первого и второго объекта произвольным образом размещают в водной среде, например, аппаратуру первого объекта спускают под воду с надводного судна, а аппаратуру второго размещают на дне.
3. В заданный момент времени t1 с первого объекта на второй передают гидроакустический сигнал А, представленный последовательностью из L пронумерованных кодовых комбинаций  каждая из которых состоит из кодовых символов sa (1<а ≤А), следующих с периодом Та. При использовании двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» и «1». Данную операцию выполняют по выходному сигналу блока управления, подаваемому на вход генератора сигнала А.
каждая из которых состоит из кодовых символов sa (1<а ≤А), следующих с периодом Та. При использовании двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» и «1». Данную операцию выполняют по выходному сигналу блока управления, подаваемому на вход генератора сигнала А.
В генераторе сигнала А осуществляют формирование сигнала А, который излучают первым передатчиком акустических сигналов в водную среду в направлении второго объекта. Одновременно выходным сигналом блока управления осуществляют запуск измерителя временного интервала, который предназначен для измерения длительности временного интервала между передачей сигнала А с первого объекта и приемом сигнала Б от второго объекта.
По окончании передачи сигнала А сигналом со второго выхода генератора сигнала А, поступающим на соединенные вместе первые управляющие входы генератора эталонного сигнала Б и первого блока сравнения, оборудование первого объекта подготавливают к приему сигнала Б от второго объекта.
4. На втором объекте приходящий акустический сигнал А преобразуют в электрическую форму, фильтруют и демодулируют. Данные операции выполняют во втором приемнике акустических сигналов.
5. Определяют временные границы кодовых символов sa сигнала А. Операцию осуществляют посредством второго измерителя границ кодовых символов, в котором определяют математическое ожидание положения границ выходных сигналов второго приемника акустических сигналов.
6. Регенерируют кодовые символы as принимаемого сигнала А. Операцию выполняют вторым регенератором кодовых символов внутри границ кодовых символов по выходным сигналам второго измерителя границ кодовых символов.
7. Сравнивают полученные из регенерированных кодовых символов регенерированные кодовые комбинации с их образами, запоминаемыми в процессе операции по п. 1. Для этого по каждому из выходных сигналов второго измерителя границ кодовых символов во второй блок сравнения вводят очередной регенерированный кодовый символ с выхода второго регенератора символов.
Во втором блоке сравнения осуществляют сравнение последовательности регенерированных кодовых символов, равной по количеству символов длине пронумерованных кодовых комбинаций  составляющих сигнал А, с эталонным сигналом А, сформированным в генераторе эталонного сигнала А.
составляющих сигнал А, с эталонным сигналом А, сформированным в генераторе эталонного сигнала А.
8. При полном совпадении первой из последовательности регенерированных кодовых комбинаций сигнала А с ее образом определяют номер этой кодовой комбинации, вводят задержку Тзад.1 до передачи сигнала Б на первый объект, равную разности фиксированного времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемую от момента полного совпадения регенерированной кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемую от момента полного совпадения регенерированной кодовой комбинации с номером  сигнала А с ее образом.
сигнала А с ее образом.
Продолжают прием сигнала А до его окончания и последовательно определяют номера  всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами. Уточняют по каждому последующему совпадению длительность задержки Тзад.1, равную величине разности фиксированного интервала времени ТА и длительности кодовой комбинации сигнала А, отсчитываемую от момента полного совпадения регенерированной кодовой комбинации с номером
всех регенерированных кодовых комбинаций акустического сигнала А, полностью совпавших с их образами. Уточняют по каждому последующему совпадению длительность задержки Тзад.1, равную величине разности фиксированного интервала времени ТА и длительности кодовой комбинации сигнала А, отсчитываемую от момента полного совпадения регенерированной кодовой комбинации с номером  сигнала А с ее образом:
сигнала А с ее образом:

где ТккА - длительность кодовой комбинации сигнала А.
Операции осуществляют при каждом полном совпадении регенерированной кодовой комбинации сигнала А с ее образом посредством выработки и подачи вторым блоком сравнения на второй блок задержки управляющего сигнала, содержащего номер  соответствующей кодовой комбинации, который используют в первом блоке задержки для задания величины задержки Тзад.1 в соответствии с выражением (2).
соответствующей кодовой комбинации, который используют в первом блоке задержки для задания величины задержки Тзад.1 в соответствии с выражением (2).
9. По истечении задержки Тзад.1 формируют и передают со второго объекта на первый гидроакустический сигнал Б, представленный последовательностью из М пронумерованных кодовых комбинаций Qm (m=1,2,3, …, М), каждая из которых состоит из кодовых символов sб (1<б *<Б), передаваемых в составе сигнала Б с периодом Тб. При использовании двоичных кодовых символов Б=2, кодовые символы sб принимают значения «0» и «1». Данные операции осуществляют по выходному сигналу первого блока задержки посредством генератора сигнала Б и второго передатчика акустических сигналов.
10. На первом объекте осуществляют операции по приему сигнала Б, определению границ кодовых символов сигнала Б, регенерации внутри границ кодовых символов и сравнению регенерированных кодовых комбинаций сигнала Б с их образами. Эти операции эквивалентны операциям по пп. 4, 5, 6, 7 и их осуществляют посредством аналогичных функциональных узлов первого объекта.
11. При полном совпадении первой из последовательности регенерированных кодовых комбинаций сигнала Б с ее образом определяют номер m этой кодовой комбинации, вводят задержку Тзад.2, соответствующую длительности интервала времени до окончания приема сигнала Б и получения результата определения времени распространения, равную разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемую от момента полного совпадения регенерированной кодовой комбинации с номером m сигнала Б с ее образом.
Продолжают прием сигнала Б до его окончания и последовательно определяют номера mi всех регенерированных кодовых комбинаций акустического сигнала Б, полностью совпавших с их образами. Уточняют по каждому последующему совпадению длительность задержки Тзад.2, отсчитываемой от момента соответствующего полного совпадения регенерированных кодовых комбинаций с номерами ml сигнала Б с их образами, равную величине разности фиксированного интервала времени Тб и длительности mi кодовых комбинаций сигнала Б:

где ТккБ - длительность кодовой комбинации сигнала Б.
Данные операции осуществляют при каждом полном совпадении регенерированной кодовой комбинации сигнала Б с ее образом посредством выработки и подачи первым блоком сравнения на первый блок задержки управляющего сигнала, содержащего номер mi соответствующей кодовой комбинации, который используют во первом блоке задержки для задания величины задержки Тзад.2, определяемой выражением (3).
12. Фиксируют на первом объекте время t2, соответствующее задержке Тзад.2, и рассчитывают время распространения τ акустического сигнала между объектами с использованием выражения (1). Полученное расчетное значение τ выдают на выходе устройства, в качестве искомого времени распространения акустического сигнала между объектами, в виде, удобном для дальнейшего применения.
Данные операции выполняют по выходному сигналу первого блока задержки, поступающему на второй вход вычислителя и на соединенные вместе вторые управляющие входы измерителя временного интервала, первого блока сравнения и генератора эталонного сигнала Б.
Из измерителя временного интервала разность времен t2-t1 передают в вычислитель, в котором с использованием длительностей фиксированных интервалов времени ТА, ТБ определяют искомое время распространения τ акустического сигнала между объектами, которое отправляют на выход устройства. Одновременно сигналом с выхода первого блока задержки осуществляют остановку первого блока сравнения и измерителя временного интервала.
Известно изобретение [2], которое относится к области телеуправления и может использоваться для построения аппаратуры телеуправления с полудуплексным режимом работы, в которой отдельные узлы аппаратуры или канал связи используются поочередно на прием и на передачу, с использованием сигналов, схожих по структуре с сигналами, описанными в [1].
Суть изобретения состоит в следующем.
Способ [2] передачи команд управления между объектами, разнесенными в пространстве, заключается в передаче с первого объекта на второй сигнала А, состоящего из последовательности L пронумерованных кодовых комбинаций, соответствующих передаваемой команде управления, с передачей номеров в составе соответствующих кодовых комбинаций сигнала А, в предварительном задании фиксированного промежутка времени ТА, равного или большего длительности сигнала А, в запоминании на втором объекте сигнала, соответствующего длительности промежутка времени ТА, в приеме и декодировании на втором объекте сигнала А, в передаче на исполнение команды управления при получении первой из кодовых комбинаций сигнала А, в которой при декодировании не обнаруживают ошибок, в определении порядкового номера  этой кодовой комбинации в составе сигнала А, в формировании на втором объекте сигнала Б, подтверждающего прием на втором объекте команды управления, в передаче со второго объекта на первый сигнала Б с задержкой Тзад, равной разности фиксированного промежутка времени ТА и длительности
этой кодовой комбинации в составе сигнала А, в формировании на втором объекте сигнала Б, подтверждающего прием на втором объекте команды управления, в передаче со второго объекта на первый сигнала Б с задержкой Тзад, равной разности фиксированного промежутка времени ТА и длительности  кодовых комбинаций сигнала А после приема кодовой комбинации с номером
кодовых комбинаций сигнала А после приема кодовой комбинации с номером  сигнала А, в приеме и декодировании на первом объекте сигнала Б, использовании декодированного сигнала в качестве сигнала подтверждения приема на втором объекте сигнала команды управления.
сигнала А, в приеме и декодировании на первом объекте сигнала Б, использовании декодированного сигнала в качестве сигнала подтверждения приема на втором объекте сигнала команды управления.
Устройство [2] передачи команд управления содержит на первом объекте, с которого осуществляется передача команд управления, последовательно соединенные первый кодер, передатчик сигнала А, первый коммутатор, последовательно соединенные приемник сигнала Б, второй декодер, причем вход первого кодера служит входом устройства, выход второго декодера служит вторым выходом устройства, вход приемника сигнала Б подключен к второму выходу первого коммутатора, третий выход первого коммутатора, через который может осуществляться двунаправленная передача сигналов, подключен к каналу связи, содержит на втором объекте, на который осуществляется передача команд управления, подключенные ко второму выходу второго коммутатора, последовательно соединенные приемник сигнала А, второй декодер, вычислитель, управляемую линию задержки, второй кодер и передатчик сигнала Б, выход которого соединен с первым входом второго коммутатора, третий выход второго коммутатора, через который может осуществляться двунаправленная передача сигналов, подключен к каналу связи, второй выход второго декодера служит первым выходом устройства, с него подается на исполнение принятая и декодированная без ошибок команда управления.
Работа устройства [2] осуществляется следующим образом.
При передаче на второй объект команды управления, на вход первого кодера, входящего в состав оборудования первого объекта, подают сигнал, по которому в первом кодере формируют L соответствующих пронумерованных кодовых комбинаций, каждая из которых содержит в своем составе присвоенный ей номер, кодовые комбинации подают в передатчик сигнала А, в нем осуществляют формирование соответствующего сигнала А, который через первый коммутатор подают в канал связи.
Сигнал А из канала связи поступает на второй коммутатор второго объекта, а через него на вход приемника сигнала А, где его фильтруют и детектируют, после чего подают на вход второго декодера, в котором осуществляют декодирование кодовых комбинаций сигнала А.
При поступлении кодовой комбинации, в которой вторым декодером не обнаруживается ошибок, сигнал с первого выхода второго декодера с номером  декодированной без ошибок кодовой комбинации сигнала А подают на вход вычислителя. Одновременно со второго выхода второго декодера, являющегося первым выходом устройства, выдают на исполнение сигнал, соответствующий принятой команде управления.
декодированной без ошибок кодовой комбинации сигнала А подают на вход вычислителя. Одновременно со второго выхода второго декодера, являющегося первым выходом устройства, выдают на исполнение сигнал, соответствующий принятой команде управления.
В вычислителе выполняют расчет времени задержки Тзад. при передаче на первый объект сигнала Б после приема кодовой комбинации с номером  сигнала А, количественно равной разности продолжительности фиксированного промежутка времени ТА и длительности
сигнала А, количественно равной разности продолжительности фиксированного промежутка времени ТА и длительности  кодовых комбинаций сигнала А:
кодовых комбинаций сигнала А:

где Tкк(i) - длительность кодовой комбинации с порядковым номером i в составе сигнала А.
На выходе управляемой линии задержки формируют сигнал с рассчитанным в вычислителе временем задержки Тзад для второго кодера и передатчика сигнала Б, где осуществляют формирование сигнала подтверждения, подаваемого через второй коммутатор в канал связи.
Сигнал Б поступает на первый коммутатор первого объекта, через него на вход приемника сигнала Б, где его фильтруют и детектируют, после чего подают на вход второго декодера, где осуществляют декодирование сигнала Б.
С выхода второго декодера, являющегося вторым выходом устройства, выдают соответствующий сигнал подтверждения приема на втором объекте команды управления.
Следует отметить схожесть технических решений изобретений [1] и [2]. В обоих случаях объекты обмениваются сигналами, состоящими «из последовательности пронумерованных кодовых комбинаций», номера кодовых комбинаций передаются в их составе, эти кодовые комбинации представляют собой кодовые комбинации корректирующего кода, обнаруживающего ошибки. В изобретении [2] это отмечается непосредственно в описании, а в изобретении [1] справедливость этого утверждения подтверждают фразы из описания о том, что в процессе приема сигналов определяют «номер первой из последовательности регенерированных кодовых комбинаций сигнала …, полностью совпавшей с ее образом».
Выполнение последующих действий по патенту [1] осуществляется только при условии приема неискаженной помехами кодовой комбинации (кодовой комбинации без ошибок). При наличии ошибок в составе кодовой комбинации она не совпадает со своим образом и игнорируется (стирается). Иными словами, операция определения «номера первой из последовательности регенерированных кодовых комбинаций сигнала …, полностью совпавшей с ее образом» в [1] оказывается полным эквивалентом операции декодирования кодовой комбинации корректирующего кода без обнаружения ошибок в [2]. В результате декодирования без ошибок на выходе декодера выдается информационная часть кодовой комбинации, в рассматриваемом случае, ее порядковый номер. Следовательно, генератор эталонного сигнала А и второй блок сравнения на втором объекте, см. фиг. 2 [1], может быть заменен одним блоком декодера сигнала А. Соответственно, генератор эталонного сигнала Б и первый блок сравнения на первом объекте, см. фиг.1 [1], может быть заменен одним блоком декодера сигнала Б.
При этом целесообразно потребовать, чтобы:
- в качестве сигналов А и Б могли использоваться сигналы нескольких команд управления и соответствующее им количество сигналов квитанций;
- количество передаваемых с первого объекта на второй сигналов команд управления равнялось K;
- распознавание сигналов команд управления осуществлялось по их идентификаторам k (1≤<k≤K);
- идентификаторы команд управления передавались в пронумерованных кодовых комбинациях, составляющих сигнал А;
- количество передаваемых со второго объекта на первый сигналов квитанций соответствовало количеству используемых команд управления и также равнялось K;
- распознавание сигналов квитанций осуществлялось по их идентификаторам k (1≤k<K), соответствующим идентификаторам k сигналов команд управления, в ответ на которые передаются эти квитанции;
- идентификаторы квитанций передавались в пронумерованных кодовых комбинациях, составляющих сигнал Б;
- результат определения времени распространения акустического сигнал между подводными объектами и другая информация, получаемая на первом объекте в результате приема сигнала Б, должны отображаться (документироваться) в блоке отображения информации.
С учетом этих требований на основе технических решений [1, 2] синтезированы способ-прототип и устройство-прототип определения времени распространения акустического сигнала между подводными объектами.
Способ-прототип определения времени распространения акустического сигнала между подводными объектами, заключающийся в передаче в некоторый момент времени t1, с первого объекта на второй акустического сигнала А, в приеме акустического сигнала А на втором объекте, в передаче акустического сигнала Б со второго объекта на первый, приеме акустического сигнала Б на первом объекте, в использовании в качестве акустического сигнала А сигналов команд управления, представленных последовательностью из L пронумерованных кодовых комбинаций, состоящих из кодовых символов sa, следующих с периодом Та, в использовании в качестве акустического сигнала Б сигналов квитанций о приеме на втором объекте команд управления, представленных последовательностью из М пронумерованных кодовых комбинаций, состоящих из кодовых символов sб, следующих с периодом Тб и
содержащих в каждой из кодовых комбинаций сигналов А и Б номер кодовой комбинации в последовательности и идентификатор команды управления k, в предварительном выборе и запоминании на первом и втором объектах фиксированного интервала времени ТА, большего или равного длительности сигнала А и соответствующего промежутку времени от момента поступления на второй объект сигнала А до окончания сигнала А и передачи на первый объект сигнала Б, в предварительном выборе и запоминании на первом объекте фиксированного интервала времени ТБ, большего или равного длительности сигнала Б и соответствующего промежутку времени от момента поступления на первый объект сигнала Б до окончания сигнала Б и получения величины искомого времени распространения акустического сигнала между объектами, причем прием акустических сигналов на втором и первом объектах включает в себя преобразование сигналов в электрическую форму, их фильтрацию и демодуляцию, определение положения временных границ периодов Та и Тб кодовых символов, регенерацию кодовых символов в кодовых комбинациях сигналов А и Б соответственно, в определении на втором объекте номера  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой k содержится в кодовой комбинации с номером
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой k содержится в кодовой комбинации с номером  сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента завершения декодирования кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента завершения декодирования кодовой комбинации с номером  в продолжении приема сигнала А до его окончания и последовательном определении номеров
в продолжении приема сигнала А до его окончания и последовательном определении номеров  всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента завершения декодирования кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента завершения декодирования кодовой комбинации с номером  в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента завершения декодирования кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора команды управления k, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mi всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок длительности задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, в фиксации на первом объекте времени t2, по истечении задержки Тзад2, в расчете времени распространения τ акустического сигнала между объектами с использованием значений времен t1, t2 и длительностей фиксированных интервалов времени ТА и ТБ, в отображении значения времени распространения τ акустического сигнала между объектами в пригодном для использования виде. Расчет времени распространения акустического сигнала τ между подводными объектами выполняется с использованием соотношения (1).
в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента завершения декодирования кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора команды управления k, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mi всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок длительности задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, в фиксации на первом объекте времени t2, по истечении задержки Тзад2, в расчете времени распространения τ акустического сигнала между объектами с использованием значений времен t1, t2 и длительностей фиксированных интервалов времени ТА и ТБ, в отображении значения времени распространения τ акустического сигнала между объектами в пригодном для использования виде. Расчет времени распространения акустического сигнала τ между подводными объектами выполняется с использованием соотношения (1).
Устройство-прототип определения времени распространения акустического сигнала между подводными объектами содержит на первом объекте: последовательно соединенные блок управления, генератор сигнала А и первый передатчик акустических сигналов, последовательно соединенные первый приемник акустических сигналов, первый регенератор кодовых символов и первый декодер, а также первый измеритель границ кодовых символов, первый блок задержки, последовательно соединенные измеритель временного интервала, первый вычислитель, блок отображения информации, выход которого служит выходом устройства, входом устройства служит вход блока управления, при этом вход первого измерителя границ кодовых символов подключен к выходу первого приемника акустических сигналов, выход первого измерителя границ кодовых символов подключен к соединенным вместе тактовым входам первого регенератора кодовых символов и первого декодера, первый выход первого декодера соединен с первым входом первого блока задержки и вторым входом блока отображения информации, второй выход первого декодера подключен к второму входу первого блока задержки, третий выход первого декодера соединен с третьим входом блока отображения информации, второй выход генератора сигнала А соединен с первым управляющим входом первого декодера, второй управляющий вход первого декодера вместе со вторыми управляющими входами первого вычислителя и измерителя временного интервала подключен к выходу первого блока задержки, первый управляющий вход измерителя временного интервала, подключен к выходу блока управления; содержит на втором объекте: последовательно соединенные второй приемник акустических сигналов, второй регенератор кодовых символов и второй декодер, последовательно соединенные второй блок задержки, генератор сигнала Б и второй передатчик акустических сигналов, а также второй измеритель границ кодовых символов, вход которого подключен к выходу второго приемника акустических сигналов, выход второго измерителя границ кодовых символов подключен к соединенным вместе тактовым входам второго регенератора кодовых символов и второго декодера, первый и второй выходы второго декодера соединены с первым и вторым входами второго блока задержки, третий выход второго декодера соединен со вторым входом генератора сигнала Б и служит выходом устройства второго объекта, с которого принятая команда управления передается на исполнение.
Работа устройства-прототипа осуществляется следующим образом.
1. Предварительно выбирают и задают структуру гидроакустических сигналов А и Б, являющихся сигналами управления, которыми объекты обмениваются между собой и одновременно используются для определения времени распространения акустического сигнала между подводными объектами.
В качестве пронумерованных кодовых комбинаций, передаваемых в составе сигналов А и Б, используют кодовые комбинации блочных корректирующих (n, q) кодов, обнаруживающих ошибки, здесь n - длина кодовой комбинации, q - количество информационных символов в кодовой комбинации.
В качестве сигнала А используют сигналы команд управления, передаваемые с первого объекта на второй. Количество информационных символов, передаваемых в составе каждой из пронумерованных кодовых комбинаций сигнала А, определяется количеством команд управления K, которое предполагается передавать с первого объекта, и количеством кодовых комбинаций L, составляющих сигнал А. Вид корректирующего кода и его избыточность выбирают, исходя из предельно допустимой величины вероятности приема на втором объекте сигнала команды управления с вероятностью необнаруженной ошибки Рно.
Вероятность Рно зависит от средней вероятности приема кодового символа с ошибкой р, вызванной действием шумов на сигнал в канале связи, и величины минимального кодового расстояния d между кодовыми комбинациями выбранного кода.
Все ошибки, кратность которых не превышает значения (d-1), гарантировано обнаруживаются кодом. Кодовые комбинации, в которых обнаруживаются ошибки, отбрасываются (стираются). Вероятность стирания кодовых комбинаций Рст >> Рно, что
позволяет принять в качестве оценки вероятности стирания значение Рст ≈ 1 - (1 - р)n.
С увеличением вероятности стирания вероятность декодирования кодовой комбинации без обнаружения ошибок снижается. Повышение вероятности Рпр декодирования кодовой комбинации команды управления без обнаружения ошибок на втором объекте достигается путем передачи в составе сигнала А без перерыва L соответствующих пронумерованных кодовых комбинаций. Сигнал А считается принятым, если при декодировании его кодовых комбинаций, по меньшей мере, в одной из них не обнаруживается ошибок. Оценкой вероятности правильного приема сигнала команды
управления, без обнаружения ошибок, в этом случае может служить величина 
Выбор конкретного вида корректирующего кода для передачи команд управления на второй объект может быть осуществлен по материалам [3].
Выбор и задание структуры гидроакустического сигнала Б, в качестве которого используются сигналы квитанций, передаваемые со второго объекта на первый, осуществляется аналогичным образом. Количество информационных символов в составе кодовых комбинаций определяется количеством используемых сигналов квитанций K и количеством кодовых комбинаций М в составе сигнала Б.
В силу пространственного разнесения первого и второго объектов шумы, действующие на входы их приемников, могут иметь разные статистические характеристики. По этой причине для передачи сигналов А и Б могут применяться кодовые комбинации разных блочных кодов, у которых кодовые символы sa и sб, могут отличаться друг от друга, также могут отличаться и периоды Та и Тб следования кодовых символов sa и sб в составе кодовых комбинаций сигналов А и Б соответственно.
Данные о структуре гидроакустического сигнала А, включая информацию о виде применяемого блочного корректирующего кода, кодовых символах sa, их периоде следования Та, количестве пронумерованных кодовых комбинаций L, числе команд управления K, передаваемых на второй объект, сохраняют в соответствующем виде на первом объекте в генераторе сигнала А и в первом передатчике акустических сигналов, на втором объекте - во втором приемнике акустических сигналов, втором регенераторе кодовых символов, втором декодере, втором измерителе границ кодовых символов и втором блоке задержки.
Данные о структуре гидроакустического сигнала Б, включая информацию о виде применяемого блочного корректирующего кода, кодовых символах sб, их периоде следования Тб, количестве пронумерованных кодовых комбинаций М, числе команд управления K, передаваемых на первый объект, сохраняют в соответствующем виде на втором объекте в генераторе сигнала Б и втором передатчике акустических сигналов, а на первом объекте - в приемнике акустических сигналов, первом блоке задержки, первом декодере, первом регенераторе кодовых символов, первом измерителе границ кодовых символов и первом вычислителе.
2. Предварительно выбирают и запоминают в соответствующем виде на первом и втором объектах фиксированный интервал времени ТА, больший или равный длительности сигнала А и соответствующий промежутку времени от момента поступления на второй объект сигнала А до его окончания и передачи на первый объект сигнала Б; выбирают и запоминают в соответствующем виде на первом и втором объектах фиксированный интервал времени ТБ, больший или равный длительности сигнала Б и соответствующий промежутку времени от момента поступления на первый объект сигнала Б до его окончания и получения величины искомого времени распространения акустического сигнала между объектами.
Величину фиксированного интервала времени ТА запоминают на первом объекте в первом вычислителе, на втором объекте - во втором блоке задержки. Величину фиксированного интервала времени ТБ запоминают на первом объекте в первом блоке
задержки и первом вычислителе.
3. Оборудование первого и второго объектов произвольным образом размещают в водной среде, например, аппаратуру первого объекта спускают под воду с надводного судна, а аппаратуру второго размещают на дне.
4. При поступлении на вход блока управления, являющегося входом устройства, внешнего сигнала о передаче на второй объект команды управления с идентификатором k, выходным сигналом блока управления, подаваемым на первый управляющий вход измерителя временного интервала и на вход генератора сигнала А в момент времени t1, осуществляют их одновременное включение.
В измерителе временного интервала начинают отсчет времени до момента приема сигнала квитанции от второго объекта, а в генераторе сигнала А с использованием полученного идентификатора k команды управления, подлежащей передаче, формируют сигнал А, образованный последовательностью из L пронумерованных кодовых комбинаций  каждая из которых состоит из кодовых символов sa (1<а≤А), следующих с периодом Та. При использовании, например, двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» или «1».
каждая из которых состоит из кодовых символов sa (1<а≤А), следующих с периодом Та. При использовании, например, двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» или «1».
Сигнал А, преобразованный первым передатчиком акустических сигналов в акустическую форму, излучают в водную среду в направлении второго объекта.
По окончании формирования и передачи сигнала А, сигналом со второго выхода генератора сигнала А, поступающим на первый управляющий вход первого декодера, осуществляют включение первого декодера, подготавливая аппаратуру первого объекта к приему сигналу Б от второго объекта.
5. На втором объекте поступающий акустический сигнал А преобразуют в электрическую форму, фильтруют и демодулируют. Данные операции выполняют во втором приемнике акустических сигналов.
6. Определяют временные границы периодов Та кодовых символов сигнала А на втором объекте. Операцию осуществляют посредством второго измерителя границ символов, выполненного в виде системы фазовой автоподстройки [4]. В качестве границ периодов Та кодовых символов сигнала А принимают моменты времени, соответствующие математическому ожиданию положения этих границ [1].
7. Во втором регенераторе кодовых символов из выходных сигналов второго приемника акустических сигналов, внутри полученных в результате выполнения операций по п. 6 границ периодов Та, получают регенерированные кодовые символы sa и передают их во второй декодер.
8. Каждый из передаваемых во второй декодер регенерированных кодовых символов вместе с последовательностью из n-1 предшествующих регенерированных кодовых символов представляют в декодере как регенерированную кодовую комбинацию корректирующего кода, которую подвергают декодированию. Если при декодировании этой кодовой комбинации обнаруживаются ошибки, то с поступлением на вход второго декодера очередного регенерированного кодового символа операцию декодирования выполняют повторно для новой, сдвинутой на один кодовый символ, регенерированной кодовой комбинации. Выполнение операции декодирования повторяют в декодере с периодом Та постоянно - до окончания сигнала А.
Если при декодировании регенерированных кодовых комбинаций в одной или нескольких из них не обнаруживается ошибок, то по каждому случаю декодирования без обнаружения ошибок на выходе второго декодера выдают соответствующие информационные и управляющие сигналы, выделенные из соответствующей кодовой комбинации сигнала А (команды управления). При декодировании первой кодовой комбинации сигнала А без обнаружения ошибок на первом, втором и третьем выходах второго декодера формируют три сигнала: на первом выходе, соединенном с первым входом второго блока задержки, - сигнал-признак декодирования кодовой комбинации без обнаружения ошибок, на втором выходе, соединенном со вторым входом второго блока задержки, - сигнал-номер  этой кодовой комбинации, на третьем выходе, соединенном со вторым входом генератора сигнала Б, - сигнал-идентификатор k принятой команды управления.
этой кодовой комбинации, на третьем выходе, соединенном со вторым входом генератора сигнала Б, - сигнал-идентификатор k принятой команды управления.
По сигналу с первого выхода второго декодера о декодировании первой кодовой комбинации без обнаружения ошибок ее номер записывают во второй блок задержки, одновременно идентификатор k принятой команды управления записывают в генератор сигнала Б и выдают команду управления с идентификатором k на исполнение. Во втором блоке задержки рассчитывают, в соответствии с выражением (2), и запоминают время задержки Тзад.1 до окончания сигнала А и начала передачи от второго объекта сигнала Б, отсчитываемое от момента окончания кодовой комбинации с номером 
9. Продолжают прием сигнала А до его окончания и последовательно определяют номера  всех регенерированных кодовых комбинаций сигнала А, при декодировании которых не обнаружено ошибок, уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.1, равную разности фиксированного интервала времени ТА и длительности
всех регенерированных кодовых комбинаций сигнала А, при декодировании которых не обнаружено ошибок, уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.1, равную разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемую от момента завершения декодирования кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемую от момента завершения декодирования кодовой комбинации с номером  . Данные операции выполняют во втором блоке задержки по мере поступления на его первый и второй входы соответствующих сигналов с первого и второго выходов второго декодера.
. Данные операции выполняют во втором блоке задержки по мере поступления на его первый и второй входы соответствующих сигналов с первого и второго выходов второго декодера.
Продолжение приема сигнала А до его окончания, как показано в [1], повышает точность определения положения границ кодовых символов sa и, соответственно, повышает точность в задании начала передачи со второго объекта сигнала Б.
10. По истечении времени задержки Тзад.1 сигнал с выхода второго блока задержки подают на второй вход генератора сигнала Б, где формируют сигнал Б, образованный последовательностью из М пронумерованных кодовых комбинаций Qm (m=1,2,3, …, М), каждая из которых состоит из кодовых символов sб (1≤б≤Б), передаваемых в составе сигнала Б с периодом Тб. При использовании двоичных кодовых символов Б=2, кодовые символы sб принимают значения «0» и «1».
11. Сформированный сигнал Б подают на вход второго передатчика акустических сигналов, где его преобразуют в акустическую форму и излучают в водную среду в направлении первого объекта.
12. На первом объекте с помощью первого приемника акустических сигналов приходящий акустический сигнал Б преобразуют в электрическую форму, фильтруют и демодулируют.
13. Определяют временные границы кодовых символов сигнала Б и регенерируют кодовые символы sб. Операции осуществляют аналогично п. 6 и п. 7 посредством первого измерителя положения границ кодовых символов и первого регенератора кодовых символов.
14. Регенерированные кодовые символы sб последовательно передают в первый декодер. Каждый из регенерированных кодовых символов вместе с последовательностью из n-1 предшествующих регенерированных кодовых символов представляют в декодере как регенерированную кодовую комбинацию, которую подвергают декодированию аналогично тому, как это выполняют на втором объекте.
15. При декодировании первой кодовой комбинации сигнала Б без обнаружения ошибок на первом, втором и третьем выходах первого декодера формируют три сигнала: на первом выходе, соединенном с первым входом первого блока задержки и вторым входом блока отображения информации, - сигнал-признак декодирования кодовой комбинации без обнаружения ошибок, на втором выходе, соединенном со вторым входом первого блока задержки, - сигнал-номер m этой кодовой комбинации, на третьем выходе, соединенном с третьим входом блока отображения информации, - сигнал-идентификатор к принятой на втором объекте к исполнению команды управления.
В первом блоке задержки рассчитывают, в соответствии с выражением (3), и запоминают время задержки до окончания сигнала Б, равное разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемое от момента завершения кодовой комбинации с номером m.
16. Продолжают прием сигнала Б до его окончания и последовательно определяют номера mi всех регенерированных кодовых комбинаций сигнала Б, при декодировании которых не обнаружено ошибок; уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.2, равную разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемую от момента завершения кодовой комбинации с номером тi. Данные операции выполняют в первом блоке задержки по мере поступления на его первый и второй входы соответствующих сигналов с первого и второго выходов первого декодера.
Продолжение приема сигнала Б до его окончания, повышает точность определения положения границ кодовых символов sб и, соответственно, повышает точность в определении момента окончания фиксированного интервала времени ТБ [1].
17. По истечении задержки Тзад.2 выходным сигналом первого блока задержки, подаваемым на вторые управляющие входы первого декодера, измерителя временного интервала и на второй вход первого вычислителя, осуществляют выключение первого декодера, остановку измерителя временного интервала, фиксируя время t2 его остановки. Длительность временного интервала t2-t1 с выхода измерителя временного интервала передают в первый вычислитель.
18. В первом вычислителе, в соответствии с выражением (1), осуществляют вычисление искомого времени распространения τ акустического сигнала между подводными объектами.
19. Рассчитанную величину времени распространения τ передают из первого вычислителя в блок отображения информации, в котором она, вместе идентификатором k принятой к исполнению на втором объекте команды управления, отображается в виде, пригодном для последующего использования.
Способ-прототип и устройство-прототип обладают ограниченными функциональными возможностями, проявляющимися в том, что передача сигнала Б со второго объекта на первый, являющегося сигналом квитанции, осуществляется по факту приема на втором объекте сигнала команды управления также, как это реализовано в [2].
Однако с позиций практического применения более информативным является передача сигнала Б со второго объекта на первый по факту исполнения принятой команды управления. Следует учитывать, что время, отведенное на исполнение отдельных команд управления, передаваемых на второй объект, может быть достаточно продолжительным, причем в зависимости от порядкового номера  первой из составляющих сигнал А кодовых комбинаций, декодирование которой прошло без обнаружения ошибок, оно может выходить за пределы задержки Тзад.1. На фиг. 1 в качестве иллюстрации приведены временные диаграммы, поясняющие зависимость времени начала передачи сигнала Б, с учетом затрат времени Тисп на исполнение команды управления на втором объекте, от номера
первой из составляющих сигнал А кодовых комбинаций, декодирование которой прошло без обнаружения ошибок, оно может выходить за пределы задержки Тзад.1. На фиг. 1 в качестве иллюстрации приведены временные диаграммы, поясняющие зависимость времени начала передачи сигнала Б, с учетом затрат времени Тисп на исполнение команды управления на втором объекте, от номера  первой из четырех кодовых комбинаций, составляющих сигнал А, декодированной без обнаружения ошибок.
первой из четырех кодовых комбинаций, составляющих сигнал А, декодированной без обнаружения ошибок.
На диаграммах а) и б) показаны случаи, в которых первыми декодированными без обнаружения ошибок в составе сигнала А являются кодовые комбинации с номерами «1» и «2». В этих случаях исполнение принятой команды управления завершается до
окончания фиксированного интервала времени ТА и начало передачи сигнала Б от второго объекта совпадает с моментом окончания интервала времени ТА.
На диаграммах в) и г) показаны случаи, в которых первыми декодированными без обнаружения ошибок в составе сигнала А являются кодовые комбинации с номерами «3» и «4». В этих случаях исполнение принятой команды управления завершается после окончания фиксированного интервала времени ТА с дополнительной задержкой TΔ.
Для недопущения передачи сигнала Б до завершения исполнения принятой команды управления напрашивается увеличение длительности фиксированного интервала времени ТА [5] до величины, удовлетворяющей условию:

где ТккА - длительность кодовых комбинаций в составе сигнала А; Тисп - интервал времени исполнения принятой команды управления на втором объекте.
Подобное решение, связанное с увеличением фиксированного интервала времени ТА до величины, удовлетворяющей условию (5), независимо от номера  первой из кодовых комбинаций, составляющих сигнал А, декодированной без обнаружения ошибок, приводит к неоправданному увеличению среднего времени управления в системе, что в ряде случаев является нежелательным.
первой из кодовых комбинаций, составляющих сигнал А, декодированной без обнаружения ошибок, приводит к неоправданному увеличению среднего времени управления в системе, что в ряде случаев является нежелательным.
В рассматриваемом случае под временем управления ty понимается [6] промежуток времени, отсчитываемый от момента принятия решения на первом объекте о необходимости изменения режима работы второго объекта, до момента получения на первом объекте сообщения о соответствующем изменении его режима работы.
Применительно к передаче сигналов управления в прототипе время управления определяется суммированием: длительности сигнала команды управления, передаваемого с первого объекта на второй, времени распространения акустического сигнала от первого объекта до второго, затрат времени на прием сигнала команды управления на втором объекте, длительности интервала времени от момента приема сигнала команды управления до момента передачи от второго объекта на первый сигнала соответствующей квитанции, длительности сигнала квитанции, времени распространения акустического сигнала от второго объекта до первого, затрат времени на прием сигнала квитанции на первом объекте.
При прочих равных условиях уменьшение средней величины времени управления может быть получено за счет уменьшения средней величины временного интервала от поступления на второй объект сигнала команды управления до передачи от него соответствующего сигнала квитанции.
Этот эффект может быть достигнут, если при декодировании сигнала команды управления (сигнала А) не обнаруживаются ошибки в кодовых комбинациях с малыми номерами  , для которых выполняется условие:
, для которых выполняется условие:

тогда передача сигнала Б начинается по истечении задержки Тзад.1, если условие (6) не выполняется, то передача сигнала Б от второго объекта начинается с дополнительной задержкой на величину TΔ:

как это показано на фиг.1 - диаграммы в) и г).
Это приводит к неоднозначности задания задержки между приходом сигнала А на второй объект и передачей от него на первый объект ответного сигнала Б. Величина задержки априорно неизвестна. Она является следствием воздействия помех на сигнал А в канале связи и проявляется в виде априорной неопределенности в определении номера  первой из кодовых комбинаций сигнала команды управления (сигнала А), в которой при декодировании не обнаруживается ошибок.
первой из кодовых комбинаций сигнала команды управления (сигнала А), в которой при декодировании не обнаруживается ошибок.
Таким образом, способу-прототипу и устройству-прототипу присущ недостаток, связанный с тем, что передача сигнала со второго объекта на первый осуществляется по факту приема на втором объекте сигнала команды управления, а не по факту ее исполнения, при этом существует априорная неоднозначность задания задержки между приходом сигнала на второй объект и передачей от него на первый объект ответного сигнала, влияющая на точность определения времени распространения акустического сигнала между объектами.
Техническим результатом заявляемых способа и устройства является передача сигнала со второго объекта не по факту приема сигнала команды управления, а после ее исполнения, и устранение влияния на определение времени распространения акустического сигнала между объектами априорной неопределенности в оценке величины задержки между приходом сигнала на второй объект и передачей от него на первый объект ответного сигнала.
Данный технический результат достигается тем, что в способе определения времени распространения акустического сигнала между подводными объектами, заключающемся в передаче в некоторый момент времени t1, с первого объекта на второй акустического сигнала А и его приеме на втором объекте, в передаче акустического сигнала Б со второго объекта и его приеме на первом объекте, в использовании в качестве акустического сигнала А сигналов команд управления, представленных последовательностью из L пронумерованных кодовых комбинаций, состоящих из кодовых символов sa, следующих с периодом Та, в использовании в качестве акустического сигнала Б сигналов квитанций о приеме на втором объекте команд управления, представленных последовательностью из М пронумерованных кодовых комбинаций, состоящих из кодовых символов sб, следующих с периодом Тб, содержащих в каждой из кодовых комбинаций сигналов А и Б номер этой кодовой комбинации в последовательности и идентификатор k команды управления, в предварительном выборе и запоминании на первом и втором объектах фиксированного интервала времени ТА, большего или равного длительности сигнала А и соответствующего промежутку времени от момента поступления на второй объект сигнала А до его окончания и передачи на первый объект сигнала Б, в предварительном выборе и запоминании на первом объекте фиксированного интервала времени ТБ, большего или равного длительности сигнала Б и соответствующего промежутку времени от момента поступления на первый объект сигнала Б до его окончания и получения величины искомого времени распространения акустического сигнала между объектами, причем прием сигналов на втором и первом объектах включает в себя преобразование акустических сигналов в электрическую форму, их фильтрацию и демодуляцию, определение границ периодов Та и Тб кодовых символов, регенерацию кодовых символов в кодовых комбинациях
сигналов А и Б соответственно, в определении на втором объекте номера  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой содержится в кодовой комбинации с номером
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой содержится в кодовой комбинации с номером  сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  в продолжении приема сигнала А до его окончания и последовательном определении номеров
в продолжении приема сигнала А до его окончания и последовательном определении номеров  всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени Тл и длительности
всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени Тл и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  , в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора k команды управления, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров m, всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок кодовых комбинаций сигнала Б задержки Тзад.2 равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером mi, в фиксации на первом объекте времени t2 по истечении задержки Тзад.2, предварительно определяют и запоминают на первом и втором объектах массив K всех команд управления, используемых в качестве сигнала А, состоящий из идентификаторов k этих команд управления и длительностей интервалов времени Тисп (k), обеспечивающих гарантированное исполнение соответствующих команд управления на втором объекте, запоминают на втором объекте номер
, в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора k команды управления, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров m, всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок кодовых комбинаций сигнала Б задержки Тзад.2 равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером mi, в фиксации на первом объекте времени t2 по истечении задержки Тзад.2, предварительно определяют и запоминают на первом и втором объектах массив K всех команд управления, используемых в качестве сигнала А, состоящий из идентификаторов k этих команд управления и длительностей интервалов времени Тисп (k), обеспечивающих гарантированное исполнение соответствующих команд управления на втором объекте, запоминают на втором объекте номер  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, фиксируют факт и момент исполнения команды управления на длительности соответствующего временного интервала Тисп (k), отведенного на исполнение команды управления, идентификатор которой k принят в составе указанной кодовой комбинации с номером
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, фиксируют факт и момент исполнения команды управления на длительности соответствующего временного интервала Тисп (k), отведенного на исполнение команды управления, идентификатор которой k принят в составе указанной кодовой комбинации с номером  сравнивают длительность временного интервала Тисп (k) с длительностью задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
сравнивают длительность временного интервала Тисп (k) с длительностью задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  при превышении временного интервала Тисп(k) длительности задержки Тзад.1 рассчитывают и запоминают их разность TΔ, в случае, когда длительность временного интервала Тисп (k) не превышает длительности задержки Тзад.1 принимают и запоминают TΔ=0, по истечении задержки Тзад.1 вводят дополнительную задержку в передачу сигнала Б на величину TΔ, хранящуюся в памяти, по истечении дополнительной задержки, проверив факт исполнения принятой команды управления, формируют сигнал квитанции, состоящий из последовательности пронумерованных кодовых комбинаций, каждая из которых содержит идентификатор k принятой команды управления, признак j исполнения/неисполнения на втором объекте команды управления и номер
при превышении временного интервала Тисп(k) длительности задержки Тзад.1 рассчитывают и запоминают их разность TΔ, в случае, когда длительность временного интервала Тисп (k) не превышает длительности задержки Тзад.1 принимают и запоминают TΔ=0, по истечении задержки Тзад.1 вводят дополнительную задержку в передачу сигнала Б на величину TΔ, хранящуюся в памяти, по истечении дополнительной задержки, проверив факт исполнения принятой команды управления, формируют сигнал квитанции, состоящий из последовательности пронумерованных кодовых комбинаций, каждая из которых содержит идентификатор k принятой команды управления, признак j исполнения/неисполнения на втором объекте команды управления и номер  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, излучают в водную среду в направлении первого объекта сформированный сигнал квитанции в виде акустического сигнала Б, на первом объекте осуществляют прием сигнала Б, запоминают номер m первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, выделяют и запоминают из этой кодовой комбинации информацию об идентификаторе k принятой на втором объекте команды управления, номере
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, излучают в водную среду в направлении первого объекта сформированный сигнал квитанции в виде акустического сигнала Б, на первом объекте осуществляют прием сигнала Б, запоминают номер m первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, выделяют и запоминают из этой кодовой комбинации информацию об идентификаторе k принятой на втором объекте команды управления, номере  первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, признаке j исполнения/неисполнения команды управления, определяют факт передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0 и длительность этой дополнительной задержки TΔ, для этого с использованием хранящейся в памяти выделенной из кодовой комбинации с номером m сигнала Б информации об идентификаторе k принятой на втором объекте команды управления, номере
первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, признаке j исполнения/неисполнения команды управления, определяют факт передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0 и длительность этой дополнительной задержки TΔ, для этого с использованием хранящейся в памяти выделенной из кодовой комбинации с номером m сигнала Б информации об идентификаторе k принятой на втором объекте команды управления, номере  первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, считывают из памяти и сравнивают длительность временного интервала Тисп (k), отведенного на исполнение команды управления с идентификатором k, с разностью фиксированного интервала времени ТА и длительности
первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, считывают из памяти и сравнивают длительность временного интервала Тисп (k), отведенного на исполнение команды управления с идентификатором k, с разностью фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, превышение длительности временного интервала Тисп (k) разности фиксированного интервала времени ТА и длительности
кодовых комбинаций сигнала А, превышение длительности временного интервала Тисп (k) разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, является признаком передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0, величина которой равна разности временного интервала Тисп (k) и разности фиксированного интервала времени ТА, уменьшенного на длительность
кодовых комбинаций сигнала А, является признаком передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0, величина которой равна разности временного интервала Тисп (k) и разности фиксированного интервала времени ТА, уменьшенного на длительность  кодовых комбинаций сигнала А, при не обнаружении признака передачи от второго объекта сигнала Б с дополнительной задержкой принимают и запоминают длительность дополнительной задержки TΔ=0, используют длительность дополнительной задержки TΔ при расчете времени распространения τ акустического сигнала между объектами по правилу: т=0.5(t2 -t1 -ТА -ТБ -TΔ), отображают искомое значение времени распространения акустического сигнала между объектами в виде, пригодном для последующего использования.
кодовых комбинаций сигнала А, при не обнаружении признака передачи от второго объекта сигнала Б с дополнительной задержкой принимают и запоминают длительность дополнительной задержки TΔ=0, используют длительность дополнительной задержки TΔ при расчете времени распространения τ акустического сигнала между объектами по правилу: т=0.5(t2 -t1 -ТА -ТБ -TΔ), отображают искомое значение времени распространения акустического сигнала между объектами в виде, пригодном для последующего использования.
При этом в устройстве определения времени распространения акустического сигнала между подводными объектами, содержащем на первом объекте: последовательно соединенные блок управления, генератор сигнала А и первый передатчик акустических сигналов, последовательно соединенные первый приемник акустических сигналов, первый регенератор кодовых символов и первый декодер, а также первый измеритель границ кодовых символов, первый блок задержки, последовательно соединенные измеритель временного интервала, первый вычислитель, блок отображения информации, выход которого служит выходом устройства, входом устройства служит вход блока управления, при этом вход первого измерителя границ кодовых символов подключен к выходу первого приемника акустических сигналов, выход первого измерителя границ кодовых символов подключен к соединенным вместе тактовым входам первого регенератора кодовых символов и первого декодера, первый выход первого декодера соединен с первым входом первого блока задержки и вторым входом блока отображения информации, второй выход первого декодера соединен со вторым входом первого блока задержки и третьим входом блока отображения информации, третий выход первого декодера соединен с четвертым входом блока отображения информации, второй выход генератора сигнала А соединен с первым управляющим входом первого декодера, первый управляющий вход измерителя временного интервала, подключен к выходу блока управления, выход первого блока задержки соединен со вторыми управляющими входами измерителя временного интервала, первого декодера и вторым входом первого вычислителя, на втором объекте: последовательно соединенные второй приемник акустических сигналов, второй регенератор кодовых символов и второй декодер, последовательно соединенные генератор сигнала Б и второй передатчик акустических сигналов, а также второй измеритель границ кодовых символов и второй блок задержки, при этом вход второго измерителя границ кодовых символов подключен к выходу второго приемника акустических сигналов, выход второго измерителя границ кодовых символов подключен к соединенным вместе тактовым входам второго регенератора кодовых символов и второго декодера, первый и второй выходы второго декодера соединены с первым и вторым входами второго блока задержки соответственно, третий выход второго декодера соединен со вторым входом генератора сигнала Б, третий выход второго декодера, служит также выходом устройства второго объекта, с которого принятая команда управления передается на исполнение, в состав устройства первого объекта введен первый блок памяти, в состав устройства второго объекта введены второй вычислитель, второй блок памяти и третий блок задержки, вход первого блока памяти подключен ко второму выходу первого вычислителя, выход первого блока памяти соединен с седьмым входом первого вычислителя, третий, четвертый, пятый и шестой входы первого вычислителя подключены к первому, второму, третьему и четвертому выходам первого декодера соответственно, пятый и шестой входы блока отображения информации подключены к четвертому и пятому выходам первого декодера соответственно, первый, второй и третий входы второго вычислителя подключены к первому, второму и третьему выходам второго декодера соответственно, первый выход второго вычислителя подключен к входу второго блока памяти, выход которого соединен с четвертым входом второго вычислителя, второй выход второго вычислителя подключен к первому входу третьего блока задержки, пятый вход второго вычислителя, второй вход третьего блока задержки и второй управляющий вход второго декодера соединены вместе и подключены к выходу второго блока задержки, выход третьего блока задержки подключен к четвертому входу генератора сигнала Б, первый и третий входы генератора сигнала Б подключены к первому и второму выходам второго декодера соответственно, второй выход генератора сигнала Б соединен с первым управляющим входом второго декодера, а на шестой вход второго вычислителя поступает сигнал признака исполнения команды управления.
Предполагаемое изобретение поясняется чертежами.
Фиг. 1 иллюстрирует зависимость задержки в передаче от второго объекта на первый сигнала Б от номера  первой комбинации, декодирование которой прошло без обнаружения ошибок, в условиях приема на втором объекте сигнала А, состоящего из четырех пронумерованных кодовых комбинаций.
первой комбинации, декодирование которой прошло без обнаружения ошибок, в условиях приема на втором объекте сигнала А, состоящего из четырех пронумерованных кодовых комбинаций.
На фиг. 2, 3 приведены схемы устройств первого и второго подводных объектов соответственно, в составе заявляемого устройства определения времени распространения акустического сигнала между подводными объектами.
Первый объект (фиг. 2), где осуществляется определение времени распространения акустического сигнала между объектами, содержит последовательно соединенные блок управления 1, генератор 2 сигнала А и первый передатчик 3 акустических сигналов, последовательно соединенные первый приемник 10 акустических сигналов, первый регенератор 7 кодовых символов и первый декодер 6, а также первый измеритель 8 границ кодовых символов, первый блок 5 задержки, первый блок 21 памяти, последовательно соединенные измеритель 4 временного интервала, первый вычислитель 9, блок отображения 11 информации, который служит выходом устройства, входом устройства служит вход 12 блока управления 1, при этом вход первого измерителя 8 границ кодовых символов подключен к выходу первого приемника 10 акустических сигналов, выход первого измерителя 8 границ кодовых символов подключен к тактовым входам регенератора 7 кодовых символов и первого декодера 6, первый выход первого декодера 6 соединен с первым входом первого блока 5 задержки, третьим входом первого вычислителя 9 и вторым входом блока отображения 11 информации, второй выход первого декодера 6 соединен со вторым входом первого блока 5 задержки, четвертым входом первого вычислителя 9 и третьим входом блока 11 отображения информации, третий выход первого декодера 6 соединен с пятым входом первого вычислителя 9 и четвертым входом блока 11 отображения информации, четвертый выход первого декодера 6 соединен с шестым входом первого вычислителя 9 и пятым входом блока 11 отображения информации, пятый выход первого декодера 6 соединен с шестым входом блока 11 отображения информации, второй выход первого вычислителя 9 соединен со входом первого блока 21 памяти, выход которого подключен к седьмому входу первого вычислителя 9, второй выход генератора 2 сигнала А соединен с первым управляющим входом первого декодера 6, первый управляющий вход измерителя 4 временного интервала подключен к выходу блока управления 1, выход первого блока 5 задержки соединен со вторыми управляющими входами измерителя 4 временного интервала, первого декодера 6 и вторым входом первого вычислителя 9.
Второй объект (фиг. 3) содержит последовательно соединенные второй приемник 13 акустических сигналов, второй регенератор 14 кодовых символов и второй декодер 15, последовательно соединенные генератор 18 сигнала Б и второй передатчик 19 акустических сигналов, а также второй измеритель 16 границ кодовых символов, второй блок 17 задержки, второй вычислитель 22, второй блок 23 памяти и третий блок 24 задержки, причем второй выход генератора 18 сигнала Б соединен с первым управляющим входом второго декодера 15, первый выход второго декодера 15 соединен с первыми входами второго блока 17 задержки, генератора 18 сигнала Б и второго вычислителя 22, второй выход второго декодера 15 соединен со вторыми входами второго блока 17 задержки, второго вычислителя 22 и третьим входом генератора 18 сигнала Б, третий выход второго декодера 15, с которого принятая команда управления передается на исполнение, соединен с третьим входом второго вычислителя 22 и вторым входом генератора 18 сигнала Б, четвертый вход генератора 18 сигнала Б подключен к выходу третьего блока 24 задержки, выход второго блока 17 задержки подключен к соединенным вместе второму управляющему входу второго декодера 15, пятому входу второго вычислителя 22 и второму входу третьего блока 24 задержки, первый выход второго вычислителя 22 подключен ко входу второго блока 23 памяти, выход которого соединен с четвертым входом второго вычислителя 22, второй выход второго вычислителя 22 подключен к первому входу третьего блока 24 задержки, шестой вход второго вычислителя 22 служит входом 25 устройства второго объекта, на который поступает сигнал признака исполнения команды управления.
Работа заявляемого устройства заключается в реализации следующих действий и операций.
1. Выбирают и задают структуру гидроакустических сигналов А и Б, используемых для определения времени распространения акустического сигнала между подводными объектами и одновременно являющихся сигналами управления, которыми обмениваются объекты. В качестве сигнала А используют сигналы команд управления, передаваемые с первого объекта на второй, а в качестве сигнала Б используют сигналы квитанций, передаваемые в ответ со второго объекта на первый. В качестве пронумерованных кодовых комбинаций, передаваемых в составе сигналов А и Б, применяют блочные корректирующие коды, обнаруживающие ошибки.
Порядок их выбора для использования в составе сигналов А (команд управления) и Б (квитанций) представлен выше в описании устройства-прототипа.
Количество информационных символов, передаваемых в составе каждой из пронумерованных кодовых комбинаций сигнала А, определяется количеством команд управления K, которое предполагается передавать с первого объекта, и количеством кодовых комбинаций L, составляющих сигнал А.
Количество информационных символов в составе кодовых комбинаций сигналов квитанций определяется количеством используемых сигналов квитанций K, количеством кодовых комбинаций М в составе сигнала Б, количеством кодовых комбинаций L в составе сигнала А и количеством сигналов-признаков исполнения или неисполнения на втором объекте принятой команды управления. Выбор конкретного вида блочного корректирующего кода для передачи команд управления и квитанций может быть осуществлен с использованием материалов [3].
Кодовые символы sa и sб, следующие с периодами Та и Тб, в составе сигналов А и Б соответственно, выбирают на основании информации о ширине полосы пропускания, фазовых и амплитудных характеристиках соответствующих акустических приемников и передатчиков, эксплуатируемых в составе оборудования первого и второго объектов, а также с учетом статистических характеристик шумов и помех, действующих на входе соответствующих приемников. В общем случае кодовые символы sa и sб, их периоды
Та и Тб, а также блочные корректирующие коды, используемые для построения сигналов А и Б, могут отличаться друг от друга.
Данные о структуре гидроакустических сигналов А (сигналов команд управления), включая информацию о конкретном виде применяемого блочного корректирующего кода, кодовых символах sa, их периоде Та, количестве пронумерованных кодовых комбинаций
L, количестве K команд управления, передаваемых на второй объект, сохраняют в соответствующем виде в генераторе 2 сигнала А, первом передатчике 3 акустических сигналов, первом вычислителе 9 и блоке 11 отображения информации, а на втором объекте - во втором приемнике 13 акустических сигналов, во втором регенераторе 14 кодовых символов, втором декодере 15, втором измерителе 16 границ кодовых символов, втором блоке 17 задержки и втором вычислителе 22.
Данные о структуре гидроакустических сигналов Б (сигналов квитанций), включая информацию о конкретном виде применяемого блочного корректирующего кода, кодовых символах sб, их периоде Тб, количестве пронумерованных кодовых комбинаций М, составляющих сигнал Б, количестве K команд управления, передаваемых на второй объект, количестве пронумерованных кодовых комбинаций L, составляющих сигнал А, признаке j исполнения или неисполнения команды управления на втором объекте сохраняют в соответствующем виде на втором объекте в генераторе 18 сигнала Б, втором передатчике 19 акустических сигналов, а на первом объекте - в первом приемнике 10 акустических сигналов, первом блоке 5 задержки, первом декодере 6, первом регенераторе 7 кодовых символов, первом измерителе 8 границ кодовых Символов, первом вычислителе 9 и блоке 11 отображения информации.
2. Выбирают и запоминают в соответствующем виде на первом и втором объектах фиксированный интервал времени ТА, больший или равный длительности сигнала А, и фиксированный интервал времени ТБ, больший или равный длительности сигнала Б. Величину фиксированного интервала времени ТА запоминают на первом объекте в первом вычислителе 9, на втором объекте - во втором блоке 17 задержки и втором вычислителе 22. Величину фиксированного интервала времени ТБ запоминают на первом объекте в первом блоке 5 задержки и первом вычислителе 9, на втором объекте - во втором вычислителе 22.
3. Также задают и запоминают в соответствующем виде в первом блоке 21 памяти на первом объекте и втором блоке 23 памяти на втором объекте предварительно определенные длительности временных интервалов Тисп (k), необходимых для исполнения на втором объекте команды управления с идентификатором k.
4. Оборудование первого и второго объектов произвольным образом размещают в водной среде, например, аппаратуру первого объекта спускают под воду с надводного судна, а аппаратуру второго объекта размещают на дне.
5. При поступлении в момент времени t1, на вход блока управления 1, являющегося входом 12 устройства, внешнего сигнала передачи на второй объект команды управления с идентификатором k, выходным сигналом блока управления 1, подаваемым на первый управляющий вход измерителя 4 временного интервала и вход генератора 2 сигнала А, осуществляют их одновременное включение.
В измерителе 4 временного интервала начинают отсчет времени до момента приема сигнала квитанции от второго объекта, а в генераторе 2 сигнала А, с использованием полученного идентификатора k команды управления, подлежащей передаче, формируют сигнал А, образованный последовательностью из L пронумерованных кодовых комбинаций  каждая из которых состоит из кодовых символов sa (1<а≤А), следующих с периодом Та. При использовании, например, двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» и «1».
каждая из которых состоит из кодовых символов sa (1<а≤А), следующих с периодом Та. При использовании, например, двоичных кодовых символов А=2, кодовые символы sa принимают значения «0» и «1».
Сигнал А в последовательном виде передают в первый передатчик 3 акустических сигналов, где преобразуют в акустическую форму и излучают в водную среду в направлении второго объекта.
По окончании формирования и передачи сигнала А сигналом со второго выхода генератора 2 сигнала А, поступающим на первый управляющий вход первого декодера 6, осуществляют включение первого декодера 6, осуществляя подготовку оборудования первого объекта к приему сигналу Б от второго объекта.
6. На втором объекте поступающий акустический сигнал А преобразуют в электрическую форму, фильтруют и демодулируют. Данные операции выполняют во втором приемнике 13 акустических сигналов.
7. Определяют на втором объекте временные границы периодов Та символов sa сигнала А. Операцию осуществляют посредством второго измерителя 16 границ кодовых символов, выполненного в виде системы фазовой автоподстройки [4]. В качестве границ периодов Та кодовых символов сигнала А принимают моменты времени, соответствующие математическому ожиданию положения этих границ [1].
8. Во втором регенераторе 15 символов из выходных сигналов второго приемника 13 акустических сигналов, внутри полученных в результате выполнения операций по п. 7 границ периодов Та, получают регенерированные кодовые символы sa и передают их во второй декодер 15.
9. Каждый из передаваемых во второй декодер 15 регенерированных кодовых символов вместе с последовательностью из n-1 предшествующих регенерированных кодовых символов представляют в декодере как регенерированную кодовую комбинацию корректирующего кода, которую подвергают декодированию. Если при декодировании этой кодовой комбинации обнаруживаются ошибки, то с поступлением на вход второго декодера 15 очередного регенерированного кодового символа операцию декодирования выполняют повторно, для новой регенерированной, сдвинутой на один кодовый символ, кодовой комбинации. Выполнение операции декодирования повторяют в декодере с периодом Та постоянно до окончания сигнала А.
Если декодирование регенерированных кодовых комбинаций происходит без обнаружения ошибок, то по каждому случаю декодирования без обнаружения ошибок на выход второго декодера 15 выдают соответствующие информационные и управляющие сигналы, выделенные из соответствующей кодовой комбинации сигнала А (команды управления).
При декодировании первой кодовой комбинации сигнала А без обнаружения ошибок с номером  на первом, втором и третьем выходах второго декодера 15 формируют три сигнала: на первом выходе, соединенном с первыми входами второго блока 17 задержки, второго вычислителя 22 и генератора 18 сигнала Б, - сигнал-признак декодирования кодовой комбинации без обнаружения ошибок, на втором выходе, соединенном со вторыми входами второго блока 17 задержки, второго вычислителя 22 и третьим входом генератора 18 сигнала Б, - сигнал-номер
на первом, втором и третьем выходах второго декодера 15 формируют три сигнала: на первом выходе, соединенном с первыми входами второго блока 17 задержки, второго вычислителя 22 и генератора 18 сигнала Б, - сигнал-признак декодирования кодовой комбинации без обнаружения ошибок, на втором выходе, соединенном со вторыми входами второго блока 17 задержки, второго вычислителя 22 и третьим входом генератора 18 сигнала Б, - сигнал-номер  этой кодовой комбинации, на третьем выходе, соединенном с третьим входом второго вычислителя 22 и вторым входом генератора 18 сигнала Б, - сигнал-идентификатор принятой команды управления k.
этой кодовой комбинации, на третьем выходе, соединенном с третьим входом второго вычислителя 22 и вторым входом генератора 18 сигнала Б, - сигнал-идентификатор принятой команды управления k.
По сигналу с первого выхода второго декодера 15 о декодировании первой кодовой комбинации из последовательности кодовых комбинаций сигнала А без обнаружения ошибок ее номер  записывают во второй блок 17 задержки, второй вычислитель 22 и генератор 18 сигнала Б, одновременно идентификатор принятой команды управления к записывают во второй вычислитель 22, генератор 18 сигнала Б и выдают в виде сигнала исполнения команды управления на выход 20 устройства второго объекта.
записывают во второй блок 17 задержки, второй вычислитель 22 и генератор 18 сигнала Б, одновременно идентификатор принятой команды управления к записывают во второй вычислитель 22, генератор 18 сигнала Б и выдают в виде сигнала исполнения команды управления на выход 20 устройства второго объекта.
Во втором блоке 17 задержки рассчитывают и запоминают время задержки Тзад.1, до окончания сигнала А и начала передачи от второго объекта сигнала Б:

После ввода идентификатора k принятой команды управления и номера  первой кодовой комбинации сигнала А, декодированной на объекте без обнаружения ошибок, во второй вычислитель 22 из второго блока 23 памяти записывают информацию о длительности интервала времени Тисп (k), отведенного на исполнение принятой команды
первой кодовой комбинации сигнала А, декодированной на объекте без обнаружения ошибок, во второй вычислитель 22 из второго блока 23 памяти записывают информацию о длительности интервала времени Тисп (k), отведенного на исполнение принятой команды
управления. Осуществляют на длительности Тисп(k) контроль за поступлением на вход 25 устройства второго объекта сигнала об исполнении принятой команды управления. Сравнивают Тисп(k) с длительностью задержки Тзад.1.
Если интервал Тисп (k), отведенный на исполнение принятой команды управления, превышает длительность задержки Тзад.1, то это означает, что сигнал Б следует передавать от второго объекта с дополнительной задержкой TΔ, длительность которой равняется:

Значение дополнительной задержки TΔ сохраняют в памяти второго вычислителя 22. Если же интервал Тисп(k) не превышает длительности задержки Тзад.1 то принимают TΔ=0, в этом случае сигнал Б следует передавать без введения дополнительной задержки.
10. Продолжают прием сигнала А до его окончания и последовательно определяют номера  всех регенерированных кодовых комбинаций, декодирование которых произошло без обнаружения ошибок; уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.1, равную разности фиксированного интервала времени ТА и длительности
всех регенерированных кодовых комбинаций, декодирование которых произошло без обнаружения ошибок; уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.1, равную разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемую от момента завершения кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемую от момента завершения кодовой комбинации с номером  .
.
Данные операции выполняют во втором блоке 17 задержки по мере поступления на его первый и второй входы соответствующих сигналов с первого и второго выходов второго декодера 15, что позволяет повысить точность определения положения границ периодов Та и, соответственно, повысить точность задания времени начала передачи со второго объекта сигнала Б.
11. По истечении задержки Тзад.1 выходным сигналом второго блока 17 задержки, подаваемым на второй управляющий вход второго декодера 15, пятый вход второго вычислителя 22 и второй вход третьего блока 23 задержки, останавливают работу второго декодера 15; а во втором вычислителе 22 и третьем блоке 23 задержки выполняют подготовительные операции по передаче сигнала Б со второго объекта.
Из второго вычислителя 22 на первый вход третьего блока 24 задержки подают сигнал, содержащий в своем составе признак j исполнения (неисполнения) принятой команды управления и длительность дополнительной задержки TΔ, полученную при выполнении операций по п. 9. По истечении дополнительной задержки TΔ из третьего блока 24 задержки на четвертый вход генератора 18 сигнала Б подают управляющий сигнал, содержащий в своем составе признак j исполнения/неисполнения принятой команды управления.
12. В генераторе 18 сигнала Б формируют сигнал Б (сигнал квитанции), образованный последовательностью из М пронумерованных кодовых комбинаций Qm (m=1,2,3, …, М), каждая из которых состоит из кодовых символов sб (1<б≤Б), передаваемых с периодом Тб.
При использовании двоичных кодовых символов Б=2, кодовые символы sб принимают значения «0» и «1». Соображения по выбору корректирующего кода, используемого при формировании сигнала Б, приведены в п. 1. При этом количество информационных символов в каждой из пронумерованных кодовых комбинаций сигнала Б определяется количеством используемых сигналов квитанций K, количеством М пронумерованных кодовых комбинаций в составе сигнала Б, количеством L пронумерованных кодовых комбинаций в составе сигнала А и признаком j исполнения или неисполнения команды управления на втором объекте.
Сформированный сигнал Б подают на вход второго передатчика 19 акустических сигналов, где его преобразуют в акустическую форму и излучают в водную среду в направлении первого объекта. По окончании передачи сигнала Б сигналом со второго выхода генератора 18 сигнала Б, поступающим на первый управляющий вход второго декодера 15, осуществляют включение второго декодера 15, осуществляя подготовку оборудования второго объекта к приему следующего сигнала А.
13. На первом объекте с помощью первого приемника 10 акустических сигналов поступающий акустический сигнал Б преобразуют в электрическую форму, фильтруют и демодулируют.
14. Далее определяют временные границы периодов Тб кодовых символов сигнала Б, регенерируют кодовые символы sб. Операции выполняют аналогично операциям на втором объекте, см. п. 7 и п. 8, посредством первого измерителя 8 границ кодовых символов и первого регенератора 7 кодовых символов.
15. Регенерированные кодовые символы sб передают в первый декодер 6. Каждый из передаваемых регенерированных кодовых символов вместе с последовательностью из n-1 предшествующих регенерированных кодовых символов представляют в декодере как регенерированную кодовую комбинацию, которую подвергают декодированию, аналогично декодированию на втором объекте. Выполнение операции декодирования повторяют в декодере 6 с периодом Тб постоянно до окончания сигнала Б.
16. При декодировании первой кодовой комбинации с номером m в последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой произошло без обнаружения ошибок, на выходах первого декодера 6 формируют соответствующие информационные и управляющие сигналы, выделенные из кодовой комбинации с номером m сигнала Б (сигнала квитанции).
На первом выходе первого декодера 6, соединенном с первым входом первого блока 5 задержки, третьим входом первого вычислителя 9 и вторым входом блока 11 отображения информации формируют сигнал-признак декодирования кодовой комбинации без обнаружения ошибок. На втором выходе первого декодера 6, соединенном со вторым входом первого блока 5 задержки, четвертым входом первого вычислителя 9 и третьим входом блока 11 отображения информации формируют сигнал, соответствующий номеру m этой кодовой комбинации. На третьем выходе первого декодера 6, соединенном с пятым входом первого вычислителя 9 и четвертым входом блока 11 отображения информации формируют сигнал, соответствующий идентификатору к принятой на втором объекте команды управления. На четвертом выходе первого декодера 6, соединенном с шестым входом первого вычислителя 9 и пятым входом блока 11 отображения информации формируют сигнал, соответствующий номеру  первой кодовой комбинации сигнала А, при декодировании которой на втором объекте не обнаружено ошибок. На пятом выходе первого декодера 6, соединенном с шестым входом блока 11 отображения информации, формируют сигнал-признак j исполнения (неисполнения) на втором объекте принятой команды управления. Соответствующие сигналы записывают в первый вычислитель 9 и блок 11 отображения информации.
первой кодовой комбинации сигнала А, при декодировании которой на втором объекте не обнаружено ошибок. На пятом выходе первого декодера 6, соединенном с шестым входом блока 11 отображения информации, формируют сигнал-признак j исполнения (неисполнения) на втором объекте принятой команды управления. Соответствующие сигналы записывают в первый вычислитель 9 и блок 11 отображения информации.
В первом блоке 5 задержки рассчитывают задержку Тзад.2, равную разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемую от момента окончания кодовой комбинации с номером m:

где ТккБ - длительность кодовой комбинации сигнала Б.
17. Продолжают приема сигнала Б до его окончания и последовательно определяют номера mi всех регенерированных кодовых комбинаций сигнала Б, при декодировании которых не обнаружено ошибок, уточняют по каждому последующему декодированию без обнаружения ошибок длительность задержки Тзад.2, равную разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемую от момента окончания кодовой комбинации с номером mi Это позволяет повысить точности определения положения границ периодов Тб и момента окончания сигнала Б. Данные операции выполняют в первом блоке 5 задержки по мере поступления на его первый и второй входы соответствующих сигналов с первого и второго выходов первого декодера 6.
18. По истечении задержки Тзад.2 сигналом с выхода первого блока 5 задержки, подаваемым на вторые управляющие входы первого декодера 6, измерителя 4 временного интервала и на второй вход первого вычислителя 9, осуществляют выключение первого декодера 6, остановку измерителя 4 временного интервала, фиксируя время t2 его остановки. Длительность временного интервала t2-t1 с выхода измерителя 4 временного интервала передают в первый вычислитель 9.
В первом вычислителе 9 осуществляют проверку факта передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0 и рассчитывают длительность этой дополнительной задержки TΔ. Для этого с использованием хранящейся в памяти первого вычислителя 9 информации об идентификаторе к принятой на втором объекте команды управления, номере  первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой на втором объекте не обнаружено ошибок, сначала считывают из первого блока 21 памяти длительность временного интервала Тисп(k), отведенного на исполнение команды управления с идентификатором k, а затем сравнивают Тисп(k) с разностью фиксированного интервала времени Тл и длительности
первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой на втором объекте не обнаружено ошибок, сначала считывают из первого блока 21 памяти длительность временного интервала Тисп(k), отведенного на исполнение команды управления с идентификатором k, а затем сравнивают Тисп(k) с разностью фиксированного интервала времени Тл и длительности  кодовых комбинаций сигнала А.
кодовых комбинаций сигнала А.
Если длительность временного интервала Тисп(k) превышает значение разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, то это является признаком передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0, которая определяется соотношением (9). Если длительность временного интервала Тисп (k) не превышает значения разности фиксированного интервала времени ТΔ и длительности
кодовых комбинаций сигнала А, то это является признаком передачи от второго объекта сигнала Б с дополнительной задержкой TΔ>0, которая определяется соотношением (9). Если длительность временного интервала Тисп (k) не превышает значения разности фиксированного интервала времени ТΔ и длительности  кодовых комбинаций сигнала А, то считают, что передача от второго объекта сигнала Б осуществлялась без введения дополнительной задержки и полагают TΔ=0. Используют полученную величину длительности дополнительной задержки TΔ для расчета времени распространения τ акустического сигнала между объектами по формуле: τ=0.5(t2-t1-ТА-ТБ-TΔ).
кодовых комбинаций сигнала А, то считают, что передача от второго объекта сигнала Б осуществлялась без введения дополнительной задержки и полагают TΔ=0. Используют полученную величину длительности дополнительной задержки TΔ для расчета времени распространения τ акустического сигнала между объектами по формуле: τ=0.5(t2-t1-ТА-ТБ-TΔ).
19. Рассчитанную величину времени распространения τ акустического сигнала между объектами передают из первого вычислителя 9 в блок 11 отображения информации, где отображает в виде, пригодном для последующего использования. Вместе с величиной τ в блоке 11 отображения информации отображают: идентификатор k принятой к исполнению на втором объекте команды управления, признак j исполнения (неисполнения) на втором объекте этой команды управления, а также номера  и m первых кодовых комбинаций сигналов А и Б соответственно, при декодировании которых не обнаружено ошибок.
и m первых кодовых комбинаций сигналов А и Б соответственно, при декодировании которых не обнаружено ошибок.
Рассмотрим дополнительные возможности, которые появляются при использовании имеющейся на первом объекте информации о порядковых номерах  и m первых кодовых комбинаций сигналов А и Б соответственно, декодирование которых не сопровождалось обнаружением ошибок.
и m первых кодовых комбинаций сигналов А и Б соответственно, декодирование которых не сопровождалось обнаружением ошибок.
Декодирование кодовых комбинаций, не сопровождающееся обнаружением ошибок, может возникать в двух случаях:
- при отсутствии в регенерированных кодовых комбинациях сигналов А и Б кодовых символов, искаженных помехами, в этих случаях происходит правильное декодирование кодовых комбинаций, вероятность таких событий Рпр;
- количество кодовых символов, искаженных помехами в регенерированных кодовых комбинациях сигналов, превышает обнаруживающую способность кода и приводит к декодированию кодовых комбинаций с необнаруженной ошибкой, вероятность таких событий Рно.
Во всех остальных случаях ошибки при декодировании обнаруживаются, что приводит к стиранию соответствующих кодовых комбинаций, вероятность стирания кодовой комбинации при этом Рст.
Применительно к декодированию одной кодовой комбинации случаи правильного декодирования кодовой комбинации, ее декодирования с необнаруженной ошибкой и стирание кодовой комбинации образуют полную группу событий: Рпр+Рно+Рст=1. Так как Рно<<Рпр и Рно<<Рст, то представляется возможным принять Рпр+Рyj≈Р и Рпр+Рст≈1.
Очевидно, что порядковые номера  и m первых кодовых комбинаций из последовательности регенерированных кодовых комбинаций сигналов А и Б соответственно, декодирование которых не сопровождалось обнаружением ошибок, являются случайными дискретными событиями.
и m первых кодовых комбинаций из последовательности регенерированных кодовых комбинаций сигналов А и Б соответственно, декодирование которых не сопровождалось обнаружением ошибок, являются случайными дискретными событиями.
Примем, что сигнал А состоит из L пронумерованных кодовых комбинаций блочного корректирующего (na, qa) кода с минимальным кодовым расстоянием da, здесь nа - длина кодовых комбинаций сигнала A, qa - количество информационных символов в кодовых комбинациях сигнала А, а сигнал Б состоит из М пронумерованных кодовых комбинаций блочного корректирующего (nб,qб) кода с минимальны кодовым расстоянием dб, здесь nб - длина кодовых комбинаций сигнала
Б, qб - количество информационных символов в кодовых комбинациях сигнала Б.
Обозначим ра - среднюю вероятность приема на втором объекте кодового символа в составе сигнала А с ошибкой, рб - среднюю вероятность приема кодового символа на первом объекте в составе сигнала Б с ошибкой. Средние вероятности приема кодовых символов сигналов А и Б зависят от отношений сигнал/шум на входах акустических приемников второго и первого объектов соответственно.
В силу пространственного разнесения подводных объектов, ошибки, возникающие при приеме сигналов А и Б, можно считать некоррелированными. Законы распределения последовательностей ошибок в составе принимаемых сигналов А и Б априорно неизвестны.
Тем не менее, использование гипотезы о независимом характере ошибок в канале связи позволяет получить оценки вероятностей декодирования первых кодовых комбинаций с порядковыми номерами  и m сигналов А и Б соответственно, декодирование которых произошло без обнаружения ошибок.
и m сигналов А и Б соответственно, декодирование которых произошло без обнаружения ошибок.
Вероятность декодирования без обнаружения ошибок первой кодовой комбинации с произвольным номером  из последовательности кодовых комбинаций, составляющих сигнал А, может оцениваться величиной:
из последовательности кодовых комбинаций, составляющих сигнал А, может оцениваться величиной:

а вероятность декодирования без обнаружения ошибок первой кодовой комбинации с произвольным номером m из последовательности регенерированных кодовых комбинаций, составляющих сигнал Б, - величиной:

Математические ожидания  и
и  номеров первых кодовых комбинаций, при декодировании которых не обнаруживаются ошибки, могут оцениваться величинами:
номеров первых кодовых комбинаций, при декодировании которых не обнаруживаются ошибки, могут оцениваться величинами:


Если подставить в выражения (13), (14) значения ра и рб, использованные при выборе блочных корректирующих кодов для формирования пронумерованных кодовых комбинаций сигналов А и Б, то полученные оценки математических ожиданий  и
и  возможно применить для целей отслеживания качества передачи сигналов А и Б в процессе обмена сигналами управления между объектами.
возможно применить для целей отслеживания качества передачи сигналов А и Б в процессе обмена сигналами управления между объектами.
Для этого в процессе обмена сигналами между объектами порядковые номера  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, отображаемые на первом объекте в блоке отображения информации, сравнивают с оценками математических ожиданий
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, отображаемые на первом объекте в блоке отображения информации, сравнивают с оценками математических ожиданий  и
и 
Если наблюдается регулярное смещение порядковых номеров  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, от соответствующих теоретических оценок математических ожиданий
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, от соответствующих теоретических оценок математических ожиданий  и
и  то это может служить признаком отличия реальных условий эксплуатации устройства от условий, заложенных в теоретическую модель для выбора сигналов А и Б.
то это может служить признаком отличия реальных условий эксплуатации устройства от условий, заложенных в теоретическую модель для выбора сигналов А и Б.
Если номера  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, в среднем превышают соответствующие оценки математических ожиданий
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, в среднем превышают соответствующие оценки математических ожиданий  и
и  то это может являться следствием низкого отношения сигнал/шум на входе соответствующего приемника. В ряде случаев, когда снижение отношения сигнал/шум связано, преимущественно, с увеличением уровня шумов в среде распространения, простое увеличение мощности передачи сигналов позволяет скомпенсировать снижение отношения сигнал/шум, уменьшить среднюю вероятность ошибок в канале связи и, соответственно, уменьшить отличие номеров
то это может являться следствием низкого отношения сигнал/шум на входе соответствующего приемника. В ряде случаев, когда снижение отношения сигнал/шум связано, преимущественно, с увеличением уровня шумов в среде распространения, простое увеличение мощности передачи сигналов позволяет скомпенсировать снижение отношения сигнал/шум, уменьшить среднюю вероятность ошибок в канале связи и, соответственно, уменьшить отличие номеров  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, от теоретических оценок математических ожиданий
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, от теоретических оценок математических ожиданий  и
и 
Если номера  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, оказываются в среднем меньше соответствующих оценок математических ожиданий
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, оказываются в среднем меньше соответствующих оценок математических ожиданий  и
и  то это указывает на высокую величину отношения сигнал/шум на входе соответствующего приемника и имеющийся запас по мощности передачи соответствующих сигналов. При наличии ограничений, например, при работе устройства от автономного источника питания с ограниченной емкостью, можно рекомендовать понизить мощность передаваемых сигналов.
то это указывает на высокую величину отношения сигнал/шум на входе соответствующего приемника и имеющийся запас по мощности передачи соответствующих сигналов. При наличии ограничений, например, при работе устройства от автономного источника питания с ограниченной емкостью, можно рекомендовать понизить мощность передаваемых сигналов.
Управление мощностью передачи сигнала А на первом объекте не представляет значительных сложностей организационного порядка, а дистанционное управление мощностью передачи сигнала Б на втором объекте потребует расширения ансамбля сигналов управления, которыми обмениваются между собой подводные объекты.
Следовательно, использование имеющейся на первом объекте информации о порядковых номерах  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, дополнительно расширяет функциональные возможности заявляемых способа и устройства определения времени распространения акустических сигналов между подводными объектами, так как обеспечивает возможность отслеживания качества передачи сигналов в обоих направлениях и создает предпосылки для контролируемого управления параметрами передачи сигналов А и Б, например, изменением мощности передачи сигналов, изменением скорости передачи сигналов (изменением длительности периодов Та, Тб), изменением количества пронумерованных кодовых комбинаций, составляющих сигналы А и Б, и/или заменой используемых корректирующих кодов.
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, дополнительно расширяет функциональные возможности заявляемых способа и устройства определения времени распространения акустических сигналов между подводными объектами, так как обеспечивает возможность отслеживания качества передачи сигналов в обоих направлениях и создает предпосылки для контролируемого управления параметрами передачи сигналов А и Б, например, изменением мощности передачи сигналов, изменением скорости передачи сигналов (изменением длительности периодов Та, Тб), изменением количества пронумерованных кодовых комбинаций, составляющих сигналы А и Б, и/или заменой используемых корректирующих кодов.
Очевидно, что для целей отслеживания качества передачи сигналов А и Б в процессе обмена сигналами между подводными объектами наряду с теоретическими оценками математических ожиданий  и
и  рассчитанных с применением выражений (13) и (14), могут применяться экспериментальные оценки математических ожиданий номеров первых кодовых комбинаций сигналов А и Б, при декодировании которых не обнаруживаются ошибки, полученные ранее в сеансах обмена сигналами управления между подводными объектами.
рассчитанных с применением выражений (13) и (14), могут применяться экспериментальные оценки математических ожиданий номеров первых кодовых комбинаций сигналов А и Б, при декодировании которых не обнаруживаются ошибки, полученные ранее в сеансах обмена сигналами управления между подводными объектами.
Существенными отличиями заявляемых способа и устройства определения времени распространения акустического сигнала между подводными объектами являются:
- передача сигналов квитанций со второго объекта осуществляется не по факту приема сигнала команды управления, а по факту ее исполнения;
- интервал времени от момента прихода сигнала команды управления на второй объект до момента передачи от него сигнала квитанции - величина переменная, априорно неизвестная;
- передача со второго объекта в составе сигнала Б (сигнала квитанции) информации о номере  первой кодовой комбинации из последовательности кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок;
первой кодовой комбинации из последовательности кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок;
- использование на первом объекте информации о номере  первой кодовой комбинации из последовательности кодовых комбинаций сигнала А, при декодировании которой на втором объекте не обнаружено ошибок, для устранения неопределенности в определении интервала времени от момента прихода сигнала команды управления на второй объект до момента передачи от него сигнала квитанции;
первой кодовой комбинации из последовательности кодовых комбинаций сигнала А, при декодировании которой на втором объекте не обнаружено ошибок, для устранения неопределенности в определении интервала времени от момента прихода сигнала команды управления на второй объект до момента передачи от него сигнала квитанции;
- использование на первом объекте информации о номерах  и m первых кодовых комбинаций сигналов А и Б, декодирование которых на втором и первом объектах не сопровождалось обнаружением ошибок, для отслеживания качества передачи сигналов управления в обоих направлениях.
и m первых кодовых комбинаций сигналов А и Б, декодирование которых на втором и первом объектах не сопровождалось обнаружением ошибок, для отслеживания качества передачи сигналов управления в обоих направлениях.
Совокупность существенных признаков, заявляемых способа и устройства имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым, обладает изобретательским уровнем, так как явным образом не следует из существующего уровня техники, и пригодно для практического применения.
Для технической реализации заявляемого устройства могут быть использованы соответствующие блоки устройств [1, 2]. Третий блок 24 задержки на втором объекте подобен второму блоку 17 задержки и может быть выполнен по его схеме. Второй вычислитель 22, введенный в состав оборудования второго объекта, подобен первому вычислителю 9, входящему в состав оборудования первого объекта, и может быть также реализован по его схеме. Первый блок 21 памяти целесообразно выполнить вместе с первым вычислителем 9, используя, например, микроконтроллер семейства megaAVR, оснащенный памятью программ и данных большого объема [7]. По той же схеме, на микроконтроллере семейства megaAVR, можно релизовать второй вычислитель 22 и второй блок 23 памяти. В качестве блока 11 отображения информации можно использовать принтер или видеомонитор, например, монитор HP Elite серии Е [8].
Источники информации
1. Патент RU 2208238, МПК G01S 15/00. Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство его осуществления // Криволапое Г.И. - заявлен 05.07.2000, опубликован 10.07.2003.
2. Патент RU 2099887, МПК Н04L 5/14. Способ передачи команд управления между объектами, разнесенными в пространстве, и устройство для его осуществления // Криволапое Г.И., Макаров А.А, Чернецкий Г.А. - заявлен 13.04.1995, опубликован 20.12.1997.
3. У. Питерсон, Э. Уэлдон. Коды, исправляющие ошибки / Пер. с англ. - М.: Мир, 1976. - 594 с.
4. Патент SU 1838801, МПК G01S 15/00. Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство его осуществления // Криволапов Г.И., Гавриленко B.C., Шеин Б.Н - заявлен 01.07.1991, опубликован 13.10.1992.
5. Арсентьев В.Г., Криволапов Г.И. Некоторые результаты реализации подводных технологий в СибГУТИ // Фундаментальная и прикладная гидрофизика, 2011, том 4, №3, С. 129-134.
6. Тарасюк Ю.Ф. Гидроакустическое телеуправление. - Л.: Судостроение, 1985. - 200 с.
7. Евстифеев А.В. Микроконтроллеры AVR семейства Mega: руководство пользователя. М.: Издательский дом «Додэка - XXI», 2007.
8. Монитор HP Elite серии Е [Электронный ресурс] // URL: https://www8.hp.com/ru/ru/elite-family/elitedisplay-e-series.html (дата обращения: 07.08.2020).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ РАСПРОСТРАНЕНИЯ АКУСТИЧЕСКОГО СИГНАЛА МЕЖДУ ОБЪЕКТАМИ, РАЗДЕЛЕННЫМИ ВОДНОЙ СРЕДОЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2208238C2 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ МЕЖДУ ОБЪЕКТАМИ, РАЗНЕСЕННЫМИ В ПРОСТРАНСТВЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099887C1 |
| Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство для его осуществления | 1991 |
|
SU1838801A3 |
| Кодек несистематического сверточного кода | 1990 |
|
SU1714812A1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ В ПОЛУДУПЛЕКСНОМ КАНАЛЕ СВЯЗИ | 1996 |
|
RU2127953C1 |
| УСТРОЙСТВО ДИВЕРГЕНТНОГО ДЕКОДИРОВАНИЯ СЕГМЕНТОВ ЛИНЕЙНОЙ РЕКУРРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2023 |
|
RU2820053C1 |
| Система для телеконтроля цифрового линейного тракта | 1987 |
|
SU1425854A1 |
| Кодек несистематического сверточного кода | 1988 |
|
SU1580567A1 |
| Способ контроля состояния канала передачи данных | 1988 |
|
SU1594708A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КАНАЛА ПЕРЕДАЧИ ДАННЫХ ПО ВЕРОЯТНОСТИ НЕОБНАРУЖЕННОЙ ОШИБКИ | 1992 |
|
RU2103818C1 |
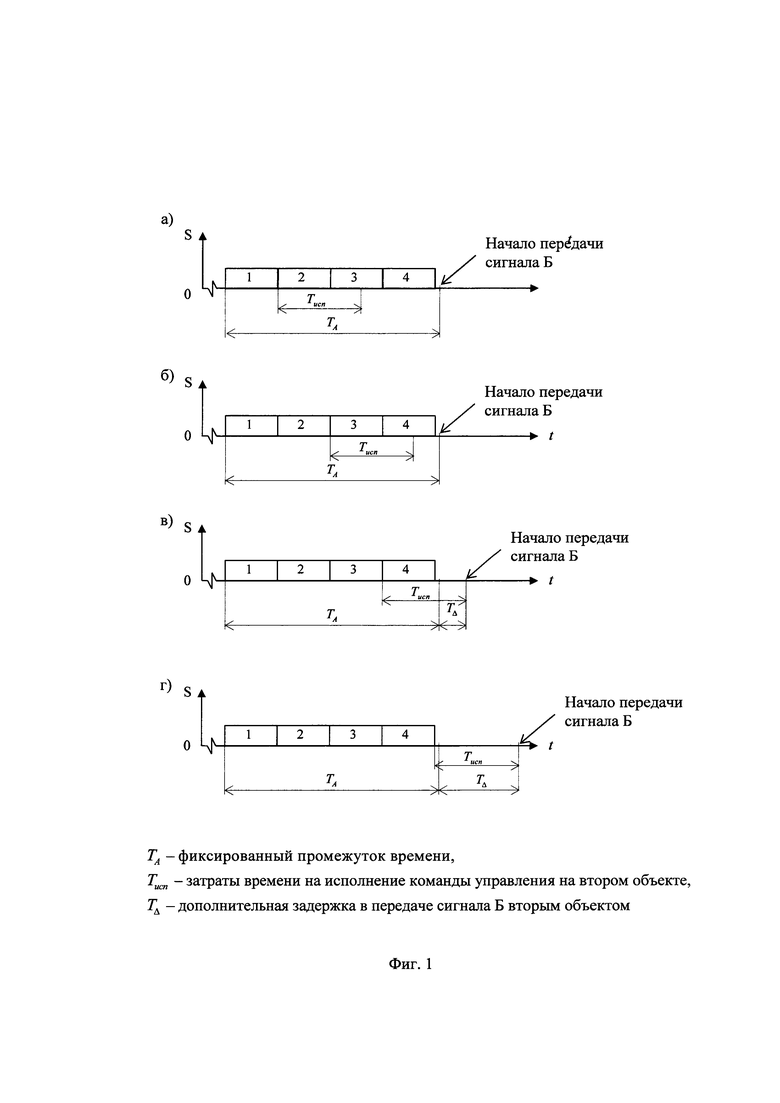
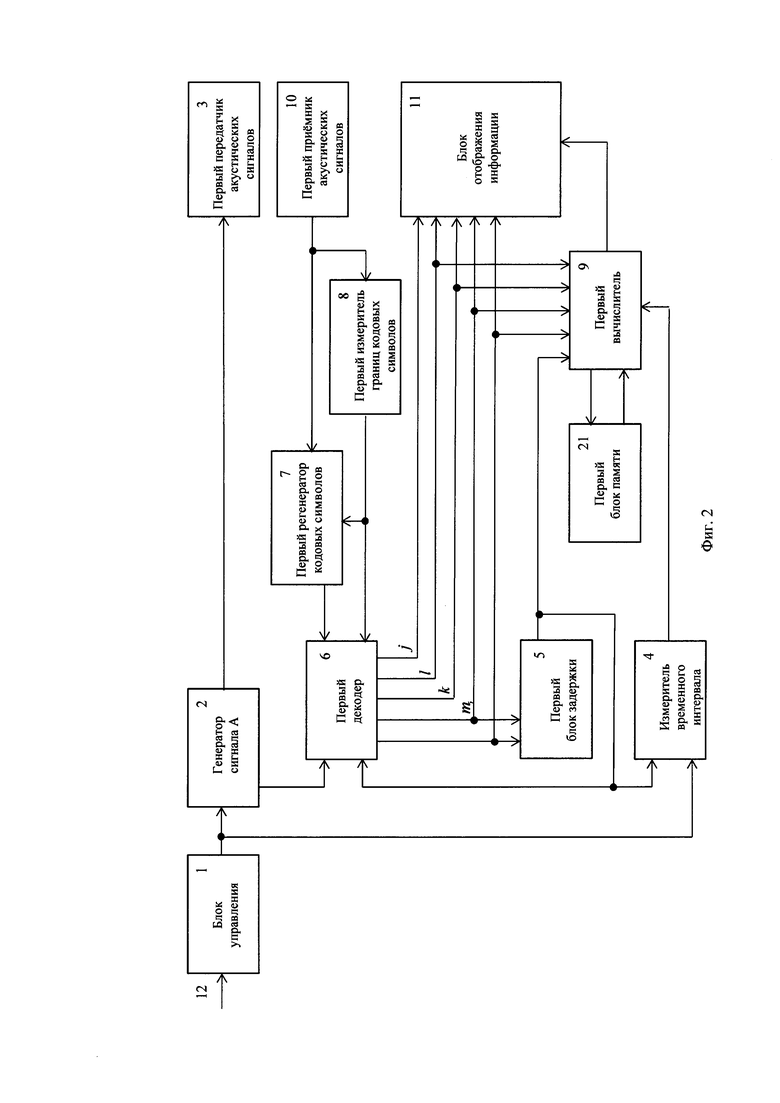
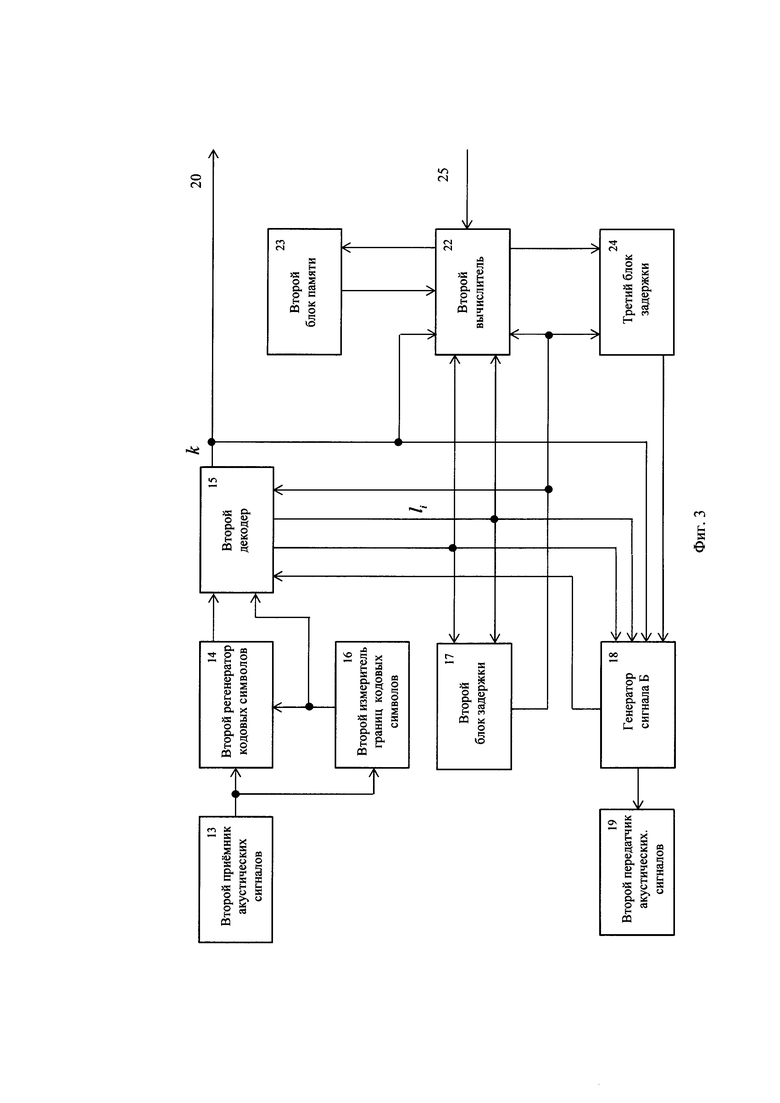
Использование: изобретение относится к области гидроакустической связи, управления и навигации и может быть использовано для определения времени распространения акустического сигнала между объектами, разделенными водной средой, осуществляющими информационный обмен сигналами командного управления по системе «запрос-ответ». Сущность: определение времени распространения акустического сигнала между подводными объектами осуществляется на основе измерения временного интервала между передачей с первого объекта, где определяется время распространения, на второй объект сигналов команд управления и приемом на первом объекте сигналов квитанций о приеме и исполнении на втором объекте соответствующих команд. При этом интервал времени от момента прихода сигнала команды управления на второй объект до момента передачи от него сигнала квитанции является априорно неизвестной переменной величиной. В качестве сигналов команд управления (сигналов А) и сигналов квитанций (сигналов Б) используются последовательности пронумерованных кодовых комбинаций блочных корректирующих кодов, обнаруживающих ошибки. В системе информационного обмена между объектами дополнительно реализована возможность контроля на первом объекте качества передачи сигналов команд управления в прямом и обратном направлениях. Технический результат: обеспечение передачи сигнала со второго объекта не по факту приема сигнала команды управления, а после ее исполнения, и устранение влияния на определение времени распространения акустического сигнала между объектами априорной неопределенности в оценке величины задержки между приходом сигнала на второй объект и передачей от него на первый объект ответного сигнала. 2 н. и 1 з.п. ф-лы, 3 ил.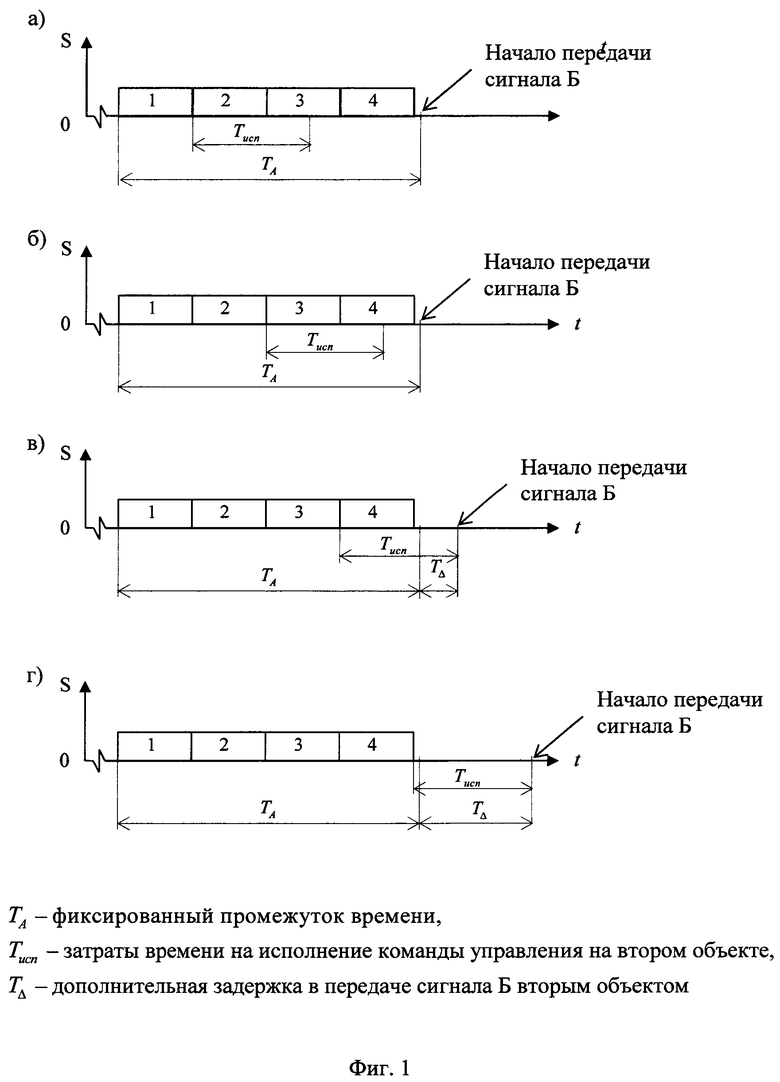
1. Способ определения времени распространения акустического сигнала между подводными объектами, заключающийся в передаче в некоторый момент времени t1, с первого объекта на второй акустического сигнала А и его приеме на втором объекте, в передаче акустического сигнала Б со второго объекта и его приеме на первом объекте, в использовании в качестве акустического сигнала А сигналов команд управления, представленных последовательностью из L пронумерованных кодовых комбинаций, состоящих из кодовых символов sa, следующих с периодом Та, в использовании в качестве акустического сигнала Б сигналов квитанций о приеме на втором объекте команд управления, представленных последовательностью из М пронумерованных кодовых комбинаций, состоящих из кодовых символов sб, следующих с периодом Тб, содержащих в каждой из кодовых комбинаций сигналов А и Б номер этой кодовой комбинации в последовательности и идентификатор k команды управления, в предварительном выборе и запоминании на первом и втором объектах фиксированного интервала времени ТА, большего или равного длительности сигнала А и соответствующего промежутку времени от момента поступления на второй объект сигнала А до его окончания и передачи на первый объект сигнала Б, в предварительном выборе и запоминании на первом объекте фиксированного интервала времени ТБ, большего или равного длительности сигнала Б и соответствующего промежутку времени от момента поступления на первый объект сигнала Б до его окончания и получения величины искомого времени распространения акустического сигнала между объектами, причем прием сигналов на втором и первом объектах включает в себя преобразование акустических сигналов в электрическую форму, их фильтрацию и демодуляцию, определение границ периодов Та и Тб кодовых символов, регенерацию кодовых символов в кодовых комбинациях сигналов А и Б соответственно, в определении на втором объекте номера  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой содержится в кодовой комбинации с номером
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, в передаче на исполнение команды управления, идентификатор которой содержится в кодовой комбинации с номером  сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
сигнала А, во введении задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  , в продолжении приема сигнала А до его окончания и последовательном определении номеров
, в продолжении приема сигнала А до его окончания и последовательном определении номеров  всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
всех регенерированных кодовых комбинаций сигнала А, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию кодовых комбинаций сигнала А без обнаружения ошибок длительности задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  , в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора k команды управления, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mi всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок кодовых комбинаций сигнала Б задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером t2 в фиксации на первом объекте времени t2 по истечении задержки Тзад.2, отличающийся тем, что предварительно определяют и запоминают на первом и втором объектах массив K всех команд управления, используемых в качестве сигнала А, состоящий из идентификаторов k этих команд управления и длительностей интервалов времени Тисп (k), обеспечивающих гарантированное исполнение соответствующих команд управления на втором объекте, запоминают на втором объекте номер
, в передаче со второго объекта на первый акустического сигнала Б по истечении задержки Тзад.1, в определении на первом объекте номера m первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, во введении задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности m кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером m, в выделении из декодированной кодовой комбинации с номером m сигнала Б идентификатора k команды управления, принятой к исполнению на втором объекте, в отображении идентификатора k в виде, пригодном для восприятия и использования, в продолжении приема сигнала Б до его окончания и последовательном определении номеров mi всех регенерированных кодовых комбинаций сигнала Б, декодирование которых прошло без обнаружения ошибок, в уточнении по каждому последующему декодированию без обнаружения ошибок кодовых комбинаций сигнала Б задержки Тзад.2, равной разности фиксированного интервала времени ТБ и длительности mi кодовых комбинаций сигнала Б, отсчитываемой от момента окончания кодовой комбинации с номером t2 в фиксации на первом объекте времени t2 по истечении задержки Тзад.2, отличающийся тем, что предварительно определяют и запоминают на первом и втором объектах массив K всех команд управления, используемых в качестве сигнала А, состоящий из идентификаторов k этих команд управления и длительностей интервалов времени Тисп (k), обеспечивающих гарантированное исполнение соответствующих команд управления на втором объекте, запоминают на втором объекте номер  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, фиксируют факт и момент исполнения команды управления на длительности соответствующего временного интервала Тисп(k), отведенного на исполнение команды управления, идентификатор которой k принят в составе указанной кодовой комбинации с номером
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, фиксируют факт и момент исполнения команды управления на длительности соответствующего временного интервала Тисп(k), отведенного на исполнение команды управления, идентификатор которой k принят в составе указанной кодовой комбинации с номером  , сравнивают длительность временного интервала Тисп(k) с длительностью задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности
, сравнивают длительность временного интервала Тисп(k) с длительностью задержки Тзад.1, равной разности фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером
кодовых комбинаций сигнала А, отсчитываемой от момента окончания кодовой комбинации с номером  , при превышении временного интервала Тисп (k) длительности задержки Тзад.1 рассчитывают и запоминают их разность ТΔ, в случае, когда длительность временного интервала Тисп (k) не превышает длительности задержки, принимают и запоминают TΔ=0, по истечении задержки Тзад.1 вводят дополнительную задержку в передачу сигнала Б на величину ТΔ, хранящуюся в памяти, по истечении дополнительной задержки, проверив факт исполнения принятой команды управления, формируют сигнал квитанции, состоящий из последовательности пронумерованных кодовых комбинаций, каждая из которых содержит идентификатор k принятой команды управления, признак j исполнения/неисполнения на втором объекте команды управления и номер
, при превышении временного интервала Тисп (k) длительности задержки Тзад.1 рассчитывают и запоминают их разность ТΔ, в случае, когда длительность временного интервала Тисп (k) не превышает длительности задержки, принимают и запоминают TΔ=0, по истечении задержки Тзад.1 вводят дополнительную задержку в передачу сигнала Б на величину ТΔ, хранящуюся в памяти, по истечении дополнительной задержки, проверив факт исполнения принятой команды управления, формируют сигнал квитанции, состоящий из последовательности пронумерованных кодовых комбинаций, каждая из которых содержит идентификатор k принятой команды управления, признак j исполнения/неисполнения на втором объекте команды управления и номер  первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, излучают в водную среду в направлении первого объекта сформированный сигнал квитанции в виде акустического сигнала Б, на первом объекте осуществляют прием сигнала Б, запоминают номер m первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, выделяют и запоминают из этой кодовой комбинации информацию об идентификаторе k принятой на втором объекте команды управления, номере
первой кодовой комбинации из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, излучают в водную среду в направлении первого объекта сформированный сигнал квитанции в виде акустического сигнала Б, на первом объекте осуществляют прием сигнала Б, запоминают номер m первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала Б, декодирование которой прошло без обнаружения ошибок, выделяют и запоминают из этой кодовой комбинации информацию об идентификаторе k принятой на втором объекте команды управления, номере  первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, признаке j исполнения/неисполнения команды управления определяют факт передачи от второго объекта сигнала Б с дополнительной задержкой ТΔ>0 и длительность этой дополнительной задержки ТΔ, для этого с использованием хранящейся в памяти выделенной из кодовой комбинации с номером m сигнала Б информации об идентификаторе k принятой на втором объекте команды управления, номере
первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, при декодировании которой не обнаружено ошибок, признаке j исполнения/неисполнения команды управления определяют факт передачи от второго объекта сигнала Б с дополнительной задержкой ТΔ>0 и длительность этой дополнительной задержки ТΔ, для этого с использованием хранящейся в памяти выделенной из кодовой комбинации с номером m сигнала Б информации об идентификаторе k принятой на втором объекте команды управления, номере  первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, считывают из памяти и сравнивают длительность временного интервала Тисп(k), отведенного на исполнение команды управления с идентификатором k, с разностью фиксированного интервала времени ТА и длительности
первой кодовой комбинации, из последовательности всех регенерированных кодовых комбинаций сигнала А, декодирование которой прошло без обнаружения ошибок, считывают из памяти и сравнивают длительность временного интервала Тисп(k), отведенного на исполнение команды управления с идентификатором k, с разностью фиксированного интервала времени ТА и длительности  кодовых комбинаций сигнала А, превышение длительности временного интервала Тисп(k) разности фиксированного интервала времени TA и длительности
кодовых комбинаций сигнала А, превышение длительности временного интервала Тисп(k) разности фиксированного интервала времени TA и длительности  кодовых комбинаций сигнала А является признаком передачи от второго объекта сигнала Б с дополнительной задержкой ТΔ>0, величина которой равна разности временного интервала Тисп(k) и разности фиксированного интервала времени ТА, уменьшенного на длительность
кодовых комбинаций сигнала А является признаком передачи от второго объекта сигнала Б с дополнительной задержкой ТΔ>0, величина которой равна разности временного интервала Тисп(k) и разности фиксированного интервала времени ТА, уменьшенного на длительность  кодовых комбинаций сигнала А, при не обнаружении признака передачи от второго объекта сигнала Б с дополнительной задержкой принимают и запоминают длительность дополнительной задержки ТΔ=0, используют длительность дополнительной задержки ТΔ при расчете времени распространения τ акустического сигнала между объектами по правилу: τ=0.5(t2-t1-TA-ТБ-ТΔ), отображают искомое значение времени распространения акустического сигнала между объектами в виде, пригодном для последующего использования.
кодовых комбинаций сигнала А, при не обнаружении признака передачи от второго объекта сигнала Б с дополнительной задержкой принимают и запоминают длительность дополнительной задержки ТΔ=0, используют длительность дополнительной задержки ТΔ при расчете времени распространения τ акустического сигнала между объектами по правилу: τ=0.5(t2-t1-TA-ТБ-ТΔ), отображают искомое значение времени распространения акустического сигнала между объектами в виде, пригодном для последующего использования.
2. Способ определения времени распространения акустического сигнала между подводными объектами по п. 1, отличающийся тем, что используют имеющуюся на первом объекте информацию о порядковых номерах  и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, для контроля на первом объекте качества передачи сигналов в прямом и обратном направлениях путем сравнения наблюдаемых регулярных смещений номеров
и m первых кодовых комбинаций сигналов А и Б, декодирование которых не сопровождалось обнаружением ошибок, для контроля на первом объекте качества передачи сигналов в прямом и обратном направлениях путем сравнения наблюдаемых регулярных смещений номеров  и m первых кодовых комбинаций сигналов А и Б относительно соответствующих теоретических и/или экспериментальных оценок
и m первых кодовых комбинаций сигналов А и Б относительно соответствующих теоретических и/или экспериментальных оценок  и
и  их математических ожиданий.
их математических ожиданий.
3. Устройство определения времени распространения акустического сигнала между подводными объектами, содержащее на первом объекте: последовательно соединенные блок управления, генератор сигнала А и первый передатчик акустических сигналов, последовательно соединенные первый приемник акустических сигналов, первый регенератор кодовых символов и первый декодер, а также первый измеритель границ кодовых символов, первый блок задержки, последовательно соединенные измеритель временного интервала, первый вычислитель, блок отображения информации, выход которого служит выходом устройства, входом устройства служит вход блока управления, при этом вход первого измерителя границ кодовых символов подключен к выходу первого приемника акустических сигналов, выход первого измерителя границ кодовых символов подключен к соединенным вместе тактовым входам первого регенератора кодовых символов и первого декодера, первый выход первого декодера соединен с первым входом первого блока задержки и вторым входом блока отображения информации, второй выход первого декодера соединен со вторым входом первого блока задержки и третьим входом блока отображения информации, третий выход первого декодера соединен с четвертым входом блока отображения информации, второй выход генератора сигнала А соединен с первым управляющим входом первого декодера, первый управляющий вход измерителя временного интервала подключен к выходу блока управления, выход первого блока задержки соединен со вторыми управляющими входами измерителя временного интервала, первого декодера и вторым входом первого вычислителя, на втором объекте: последовательно соединенные второй приемник акустических сигналов, второй регенератор кодовых символов и второй декодер, последовательно соединенные генератор сигнала Б и второй передатчик акустических сигналов, а также второй измеритель границ кодовых символов и второй блок задержки, при этом вход второго измерителя границ кодовых символов подключен к выходу второго приемника акустических сигналов, выход второго измерителя границ кодовых символов подключен к соединенным вместе тактовым входам второго регенератора кодовых символов и второго декодера, первый и второй выходы второго декодера соединены с первым и вторым входами второго блока задержки соответственно, третий выход второго декодера соединен со вторым входом генератора сигнала Б, третий выход второго декодера служит также выходом устройства второго объекта, с которого принятая команда управления передается на исполнение, отличающееся тем, что в состав устройства первого объекта введен первый блок памяти, в состав устройства второго объекта введены второй вычислитель, второй блок памяти и третий блок задержки, вход первого блока памяти подключен ко второму выходу первого вычислителя, выход первого блока памяти соединен с седьмым входом первого вычислителя, третий, четвертый, пятый и шестой входы первого вычислителя подключены к первому, второму, третьему и четвертому выходам первого декодера соответственно, пятый и шестой входы блока отображения информации подключены к четвертому и пятому выходам первого декодера соответственно, первый, второй и третий входы второго вычислителя подключены к первому, второму и третьему выходам второго декодера соответственно, первый выход второго вычислителя подключен к входу второго блока памяти, выход которого соединен с четвертым входом второго вычислителя, второй выход второго вычислителя подключен к первому входу третьего блока задержки, пятый вход второго вычислителя, второй вход третьего блока задержки и второй управляющий вход второго декодера соединены вместе и подключены к выходу второго блока задержки, выход третьего блока задержки подключен к четвертому входу генератора сигнала Б, первый и третий входы генератора сигнала Б подключены к первому и второму выходам второго декодера соответственно, второй выход генератора сигнала Б соединен с первым управляющим входом второго декодера, а на шестой вход второго вычислителя поступает сигнал признака исполнения команды управления.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ РАСПРОСТРАНЕНИЯ АКУСТИЧЕСКОГО СИГНАЛА МЕЖДУ ОБЪЕКТАМИ, РАЗДЕЛЕННЫМИ ВОДНОЙ СРЕДОЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2208238C2 |
| Способ определения времени распространения акустического сигнала между объектами, разделенными водной средой, и устройство для его осуществления | 1991 |
|
SU1838801A3 |
| US 4639129 A1, 27.01.1987 | |||
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ МЕЖДУ ОБЪЕКТАМИ, РАЗНЕСЕННЫМИ В ПРОСТРАНСТВЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099887C1 |
| US 20140301166 A1, 09.10.2014. | |||

