Изобретение относится к системам оптической навигации, в частности, с использованием лазерных и оптических источников и может быть использовано для обеспечения посадки летательных аппаратов, движения судов, дорожно-строительной, сельскохозяйственной техники и автомобильного транспорта.
Известен оптический маяк визуальной посадки по глиссаде [1], в котором реализуется способ формирования с помощью ламповых источников света в вертикальной плоскости прилегающие друг к другу световые зоны разных цветов, при этом правильному полету по глиссаде соответствует нахождение летательного аппарата (ЛА) в центральной угловой зоне зеленого цвета. Недостатками этого способа является низкая информативность из-за отсутствия горизонтальных огней и информации об относительном положении в цветовой зоне (край или середина). Кроме того, у руководителя визуальной посадки отсутствует достоверная информация о положении ЛА относительно глиссадных огней, что снижает вероятность безопасной посадки, т.к. не обеспечивается возможность объективной коррекции траектории ЛА с земли или корабля в случае неадекватных действий пилота.
Известно устройство определения положения ЛА в пространстве с помощью мобильной лазерной трехцветной навигационной системы [2], в котором используется способ, основанный на формировании цветовых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения в заданной длине волны. Способ реализуется посредством двух источников оптического излучения, разнесенных в пространстве, образуя, таким образом, три зоны, покрытые оптическим излучением разных длин волн. Каждый источник позволяет получить не менее двух неперекрывающихся пучков оптического излучения с различными длинами волн. Оптические пучки с совпадающими диапазонами длин волн перекрываются в зоне створа. Вне зоны створа эти пучки перекрываются с пучками оптического излучения иных диапазонов длин волн.
Недостатками данного способа являются низкая точность, поскольку положение ЛА относительно оси взлетно-посадочной полосы (ВПП) в пределах одной цветовой зоны является неопределенным. Кроме этого, положение ЛА оценивается летчиком визуально, что приводит к необходимости участия человека в контуре управления самолетом, при этом автоматическая посадка невозможна.
Технической задачей изобретения является повышение точности и надежности измерения местоположения ЛА относительно ВПП, обеспечение дополнительного измерения углов рыскания, крена, тангажа, а также автоматизация процесса измерения этих параметров.
Технический результат при использовании заявляемого способа заключается в повышении точности определения местоположения относительно ВПП и углов ориентации ЛА, достигаемой за счет использования лазерного ИК маяка, трех приемников излучения лазера, вычислителя координат ЛА, где осуществляется решение системы нелинейных алгебраических уравнений относительно искомых координат ЛА - X, Y, Z, γ, ψ, υ.
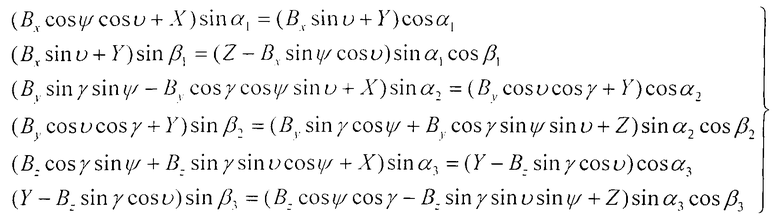
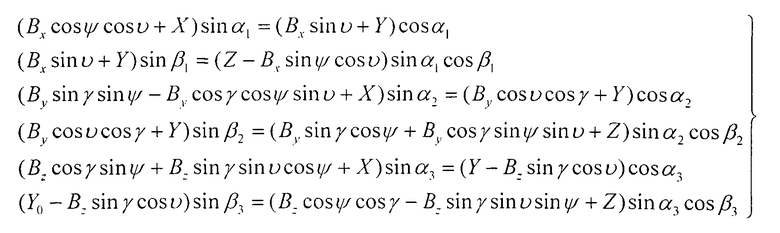
Единый технический результат изобретения достигается тем, что в способе определения местоположения и углов ориентации летательного аппарата относительно оси взлетно-посадочной полосы, основанном на формировании световых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения заданной длины волны, регистрируют излучение установленного в окрестности взлетно-посадочной полосы лазерного маяка посредством трех разнесенных приемников излучения, выполненных в виде фоточувствительных датчиков, установленных на ЛА, лазерный маяк, обеспечивающий сканирование околоземного пространства узким лучом полупроводникового лазера, модулированным в зависимости от угла поворота α от оси ОХ по азимуту и по высоте - β, развертка лазерного луча может выполняться построчным способом, при этом определяют координаты ЛА в горизонтальной системе координат OXYZ, ось ОХ которой параллельна оси взлетно-посадочной полосы, а также углы ориентации ЛА: углы рыскания, крена и тангажа, путем численного решения системы нелинейных алгебраических уравнений:
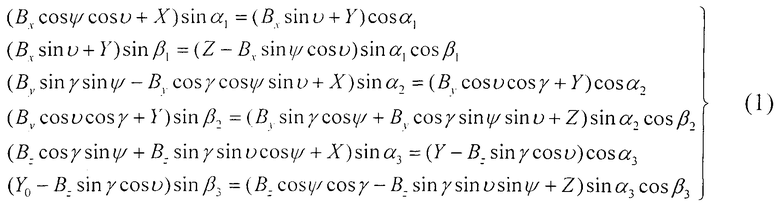
где α1, β1, α2, β2, α3, β3 - углы местоположения первого, второго и третьего фоточувствительных датчиков, снимаемые в виде цифрового кода с этих датчиков;
Bx, By, Bz - координаты расположения фоточувствительных датчиков в системе координат O(1)X(1)Y(1)Z(1);
ψ, γ, υ - углы рыскания, крена и тангажа ЛА соответственно;
X, Y, Z - координаты ЛА в системе координат OXYZ.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
формирование дискретного электромагнитного поля в инфракрасном диапазоне (например, 1,55 мкм.);
модуляция лазерного луча по величине угла азимута и высоты;
вычисление координат местоположения летательного аппарата, углов рыскания, крена, тангажа, по информации, полученной с приемников излучения лазерного маяка.
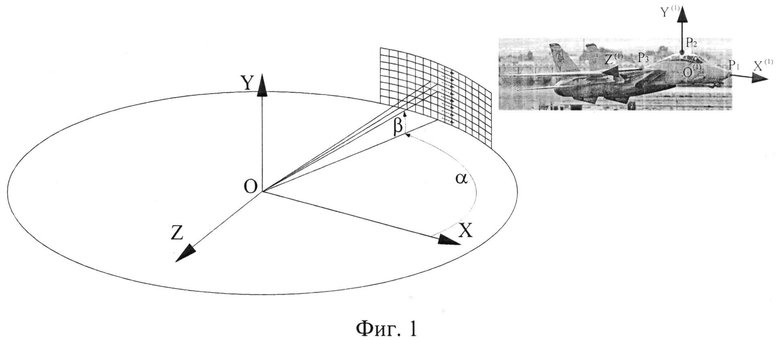
На фиг.1 показана схема расположения лазерного маяка и ЛА, с установленными на нем фоточувствительными приемниками, в процессе определения местоположения и углов ориентации ЛА; на фиг.2 - сканирующее устройство маяка, реализующее предлагаемый способ; на фиг.3 - вероятность сбоя оптического канала связи для различных географических регионов.
Способ реализуется следующим образом. В начале горизонтальной системы координат OXYZ расположен лазерный маяк, обеспечивающий сканирование околоземного пространства узким лучом полупроводникового лазера. Лазерный луч модулирован (например, посредством импульсно-кодовой модуляции) в зависимости от угла поворота α от оси ОХ по азимуту и по высоте - β (фиг.1).
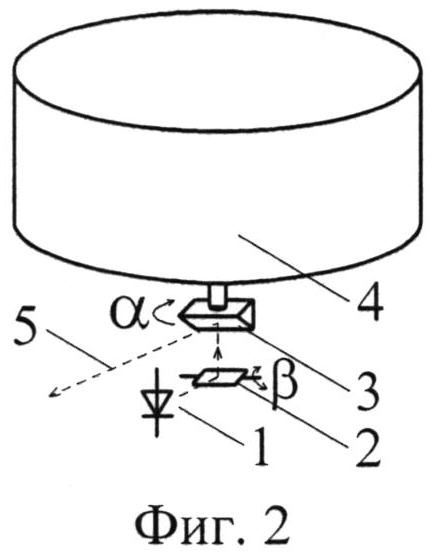
Развертка лазерного луча может выполняться построчным способом, который десятки лет успешно применяется в телевидении, например, посредством устройства, показанного на фиг.2, где позициями обозначены следующие элементы:
1 - лазерный излучатель;
2 - зеркало для развертки по вертикали (ось вращения горизонтальна);
3 - вращающееся зеркало для развертки по горизонтали (ось вращения вертикальна);
4 - электродвигатель;
5 - луч лазера.
Устройство развертки лазерного луча обеспечивает развертку по горизонтали на угол 0°≤α≤360°, а также по вертикали на угол β (фиг.1) при необходимости, для сужения горизонтальной развертки зеркало 3 необходимо выполнить в виде равносторонней пирамиды с отражающими боковыми гранями (фиг.2).
На ЛА установлена группа разнесенных фоточувствительных приемников Р1, Р2, Р3, которые принимают лазерное излучение, и после демодуляции полученных сигналов формируется три сигнала α1, α2, α3, об угловом положении фотоприемников по азимуту и по высоте β1, β2, β3 в системе координат OXYZ. Считаем, что координаты фотоприемников P1(Bx,0,0), P2(0,By,0), P3(0,0,Bz) в системе координат O(1)X(1)Y(1)Z(1) известны. Задача состоит в определении линейного и углового положения ЛА в системе OXYZ, заданного координатами x, y, z положения начала координат O(1) и углами ψ, γ, υ - определяющими угловое положение системы в системе OXYZ (фиг.1).
Запишем векторы 



где i(1), j(1), k(1) - орты системы координат O(1)X(1)Y(1)Z(1), 
Спроецируем эти уравнения на оси системы координат OXYZ, для этого умножим их поочередно на орты i, j, k.

Выразим координаты фотоприемников через измеряемые ими углы
Xi=OPicosα1cosβ1,
Yi=OPisinα1cosβ1,
Zi=OPisinβ1,
где  - модуль вектора OPi.
- модуль вектора OPi.
Используя последние соотношения, преобразуем выражения (2)
OP1cosα1cosβ1=ii(1)Bx+X
OP1sinα1cosβ1=ji(1)Bx+Y
OP1sinβ1=ki(1)Bx+Z
OP2cosα2cosβ2=ij(1)By+X
OP2sinα2cosβ2=jj(1)By+Y
OP2sinβ2=kj(1)By+Z
OP3cosαcosβ3=ik(1)Bz+X
OP3sinα3cosβ3=jk(1)Bz+Y
OP3sinβ3=kk(1)Bz+Z
Исключим из этих соотношений параметры OP1, OP2, и OP3
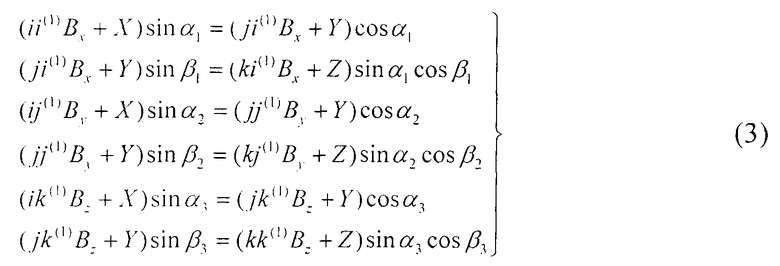
Взаимное угловое положение систем координат OXYZ и O(1)X(1)Y(1)Z(1) описывается матрицей направляющих косинусов следующего вида 
Подставим в соотношения (3) выражения коэффициентов матрицы направляющих косинусов
Полученная нелинейная система уравнений относительно неизвестных X, Y, Z, γ, ψ, υ может быть решена одним из численных методов, например Ньютона, Адамса, последовательных приближений.
Таким образом, предлагаемая измерительная система обеспечивает полное решение задачи навигации в окрестности маяка, поскольку определяется не только местоположение ЛА (координаты X, Y, Z), но и его угловое положение (углы γ, ψ, υ). Вычисление неизвестных X, Y, Z, γ, ψ, υ в реальном времени обеспечивает знание текущих координат положения ЛА и открывает возможность автоматизации управления движением в соответствии с решаемой задачей.
Поскольку рассматриваемый способ измерения относится к навигации, то чрезвычайно важным является вопрос о потенциальной надежности и точности системы в случае ее реализации.
Надежность такой системы измерения положения может оказаться недостаточной из-за влияния атмосферных условий на информационный канал связи, возникающий между маяком при передаче сигналов α1, α2, α3, β1, β2, β3 и фоточувствительными приемниками. Поэтому без оценки надежности такого информационного канала рассмотрение предложенного способа измерения положения является некорректным.
При правильной установке и настройке атмосферного оптического канала связи, определяющим фактором надежности этого канала являются погодные условия в месте его расположения [3]. Влияние атмосферы проявляется в ослаблении луча метеорологическими факторами: дождем, снегом, туманом, песчаной бурей, а также техногенными аэрозолями. Также дополнительными факторами уменьшения мощности излучения в плоскости приема являются турбулентные образования в атмосфере и их взаимодействие с излучением лазера, что приводит к так называемым "дрожанию" луча и его "пятнистости" в плоскости приема.
Оценку вероятности сбоя оптического канала связи проведем по методике, представленной в статье [3]. Терминология, используемая в этом пункте, соответствует той, которая использовалась в статье.
Основным параметром, описывающим процесс взаимодействия оптического излучения с атмосферой, является метеорологическая дальность видимости (МДВ). Погодные условия различаются не только для различных географических районов, но и от года к году. Статистическим параметром погоды для конкретного географического места, определяющим надежность канала связи, является доля времени за год, в течение которого МДВ меньше заданной величины. Обработка статистических данных метеорологических наблюдений позволила определить эмпирическую зависимость этого параметра от расстояния, следующего вида [3]:

где W(L) - вероятность наступления погодных условий, при которых МДВ меньше расстояния L,
L - расстояние оптического канала связи, м,
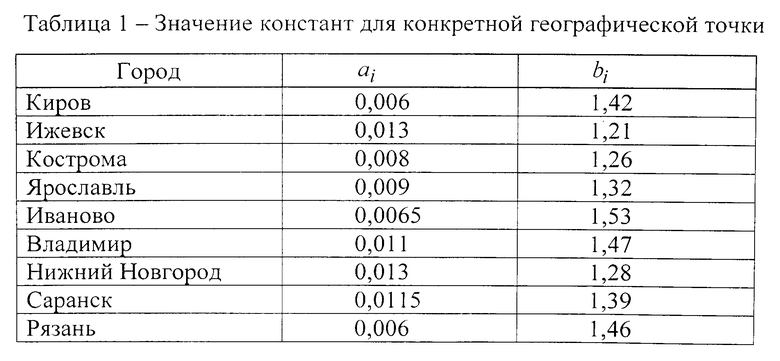
ai, bi - константы для конкретной географической точки.
Соотношение (4) справедливо для МДВ менее 17 км [3].
Константы для конкретной географической точки (по различным городам России) приведены в таблице 1, они рассчитаны за период наблюдения в несколько лет по некоторым городам, расположенным в различных географических регионах России.
В ясную погоду турбулентность атмосферы определяет предельную дальность связи. Влияние турбулентности атмосферы и сцинтилляции в пучке лазерного излучения значительно ослабляется при введении нескольких лазерных передатчиков, поскольку их излучение существенно некогерентно.
В настоящее время теория турбулентных процессов в атмосфере, относящаяся к инерционному интервалу развития турбулентности, позволяет описать многие флуктуационные эффекты в лазерных пучках на атмосферных трассах. Эта теория, основанная на "законе двух третей" Колмогорова, предполагает наличие процесса каскадного дробления вихрей при устойчивом спектре распределения размеров неоднородностей. Такой подход долгое время служил почти единственной основой для интерпретации экспериментальных данных о флуктуациях лазерного излучения в атмосфере, в том числе и на приземных трассах. А применительно к случаю распространения лазерного излучения в приземном слое воздуха эта теория оказывается слишком грубым приближением. Анализ результатов исследований, изложенных в различных публикациях, показывает, что турбулентность в приземном слое воздуха носит более сложный характер, что обусловлено развитием различного рода неустойчивостей. Так как в настоящее время отсутствуют законченные теоретические исследования, которые позволяют оценить параметры надежности канала связи, а также усреднить влияние апертуры приемника и учесть разрушение когерентности на аэрозолях атмосферы, то предлагается эмпирическая зависимость, оценивающая данные факторы [3]

где I - фактор возможного ослабления сигнала на расстоянии L, дБ,
L - расстояние от передатчика до приемника, м,
Θ - полный угол расходимости излучения передатчика, рад,
Dr - диаметр апертуры оптической системы приемника, м.
Выражение (5) было получено на основании прямых измерений, а также данных других производителей атмосферных оптических линий связи, в частности Optical Access [3].
Используя закон Бугера, а также фактор геометрического ослабления сигнала, из выражения (5) получаем уравнение определения максимальной длины трассы при данной МДВ

где Pt - импульсная мощность передатчиков, Вт,
Pr - чувствительность приемника при соотношении сигнал/шум 10/1, Вт,
V - метеорологическая дальность видимости, м,
N - количество передающих лазеров.
Коэффициент 1,2 при V введен для учета длины волны инфракрасного излучения лазеров (0,8-1,6 мкм) [3].
Используя выражения (4) и (6), получим соотношение для определения надежности канала связи в зависимости от дальности и погодных условий для конкретной местности.
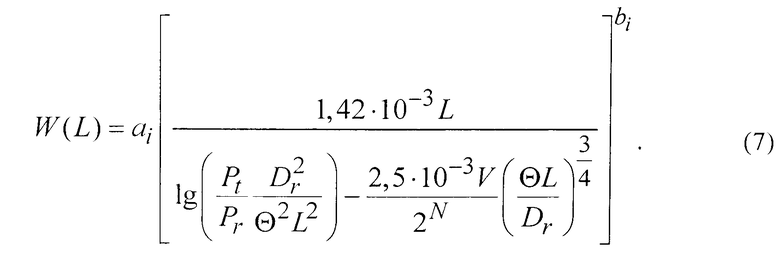
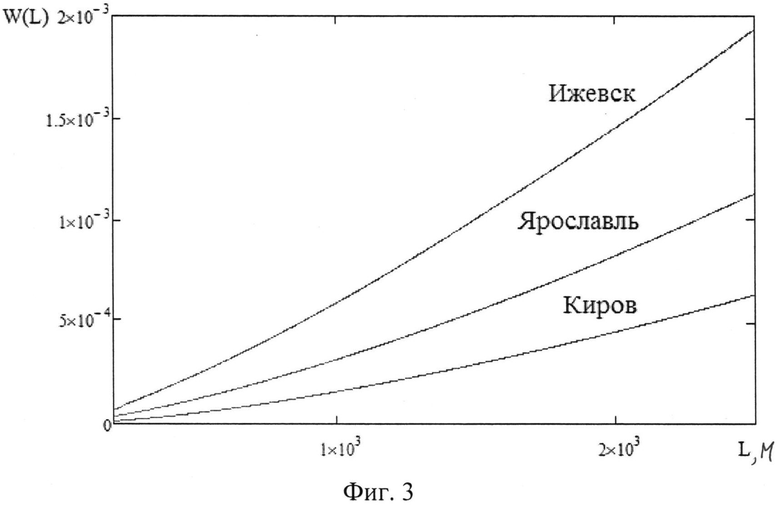
Полученное выражение (7) используем при вычислении вероятности сбоя оптического канала связи для различных географических регионов, таких как Ижевск, Ярославль, Киров. При этом в качестве исходных данных для вычисления использовались следующие значения константы ai, bi для конкретной географической точки (таблица 1):
расстояние от лазерных маяков до приемника излучения до 2500 м; угол расхождения излучения 10-5 рад; диаметр апертуры оптической системы приемника 0,01 м; МДВ - 30 м.; N=1.
Результат вычислений приведен на фиг.3. Он иллюстрирует вероятность сбоя оптического канала связи в зависимости от дистанции, выбранной в разных географических точках.
Использование подобных оценок дает возможность с высокой достоверностью определить надежность канала связи для заданной дистанции или допустимую дистанцию при заданной надежности канала связи.
Следует отметить, что в мировой практике рекомендуемую дальность связи оптических систем принято оценивать для погодных условий основных городов ведущих стран мира [3]. В любом случае для принятия решения о применении канала атмосферной лазерной связи рекомендуется использовать изложенные выше оценочные расчеты, учитывающие конкретные погодные условия и параметры систем.
Максимальная вероятность сбоя на расстоянии 2 км для г.Ижевска (худший район для функционирования системы) равна 1,4×10-3, а вероятность безотказной работы - 99,86%. Несложно подсчитать, что канал связи будет не доступен в течении одного года чуть более 12 часов.
Рассмотрим вопрос о потенциальной точности предлагаемой системы, для этого оценим величину сечения лазерного луча на рабочей дистанции 1-2 км. При расходимости луча Θ и дальности L сечение луча определяется величиной
Δ=Θ·L=10-5·103=10-2 м.
Таким образом, на удалении 1 км сечение лазерного луча будет иметь величину 1 см, что и определяет порядок погрешностей измерения системы. Для сравнения микроволновые системы посадки (MLS), системы позиционирования GPS (ГЛОНАСС) в дифференциальном режиме имеют погрешности десятки сантиметров. Что позволяет сделать вывод о том, что предлагаемая система может оказаться вполне конкурентоспособной при решении задач локальной навигации.
Источники информации
1. Патент US на изобретение N 4064424, кл. B64E 1/20, 1982 (аналог).
2. Патент РФ на изобретение №2083444, кл. G01S 5/08, 22.03.1994 (прототип).
3. Зеленюк, Ю.И. Влияние погодных условий на надежность атмосферной оптической связи [Текст] / Ю.И. Зеленюк, И.В. Огнев, С.Ю. Поляков, С.Е. Широбакин - Вестник связи, №4, 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ САМОЛЕТА-ЗАПРАВЩИКА И КОНУСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402035C1 |
| Способ навигации подвижного объекта | 2016 |
|
RU2626017C1 |
Изобретение относится к системам оптической навигации, в частности, с использованием лазерных и оптических источников и может быть использовано для обеспечения посадки летательных аппаратов, движения судов, дорожно-строительной, сельскохозяйственной техники и автомобильного транспорта. Достигаемый технический результат - повышение точности и надежности измерения местоположения летательного аппарата относительно взлетно-посадочной полосы. Способ заключается в вычислении координат местоположения ЛА и углов крена, курса и тангажа по информации, снимаемой с трех разнесенных фоточувствительных приемников, установленных на ЛА, излучения лазерного маяка, сканирующего окружающее пространство узким лучом, модулированным по величине его углов азимута и высоты. 3 ил.
Способ определения местоположения и углов ориентации летательного аппарата относительно взлетно-посадочной полосы, основанный на формировании световых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения заданной длины волны, отличающийся тем, что регистрируют излучение, установленного в окрестности взлетно-посадочной полосы, лазерного маяка посредством трех разнесенных приемников излучения, выполненных в виде фоточувствительных датчиков, установленных на ЛА, лазерный маяк, обеспечивающий сканирование околоземного пространства узким лучом полупроводникового лазера, модулированным в зависимости от угла поворота α по азимуту и по высоте - β, развертка лазерного луча может выполняться построчным способом, при этом определяют координаты местоположения ЛА в горизонтальной системе координат OXYZ, ось ОХ которой параллельна оси взлетно-посадочной полосы, а также углы ориентации ЛА: углы рыскания, крена и тангажа, путем численного решения системы нелинейных алгебраических уравнений:
где α1, β1,, α2, β2,, α3, β3 - углы местоположения первого, второго и третьего фоточувствительных датчиков, снимаемые в виде цифрового кода с этих датчиков;
Bx, By, Bz - координаты расположения фоточувствительных датчиков в системе координат O(1)X(1)Y(1)Z(1)
γ, ψ, υ - углы крена, рыскания и тангажа ЛА соответственно;
X, Y, Z - координаты ЛА в системе координат OXYZ.
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| US 7106421B2, 12.09.2006 | |||
| WO 2006135916 A1, 21.12.2006 | |||
| LP 2004012183 A, 15.01.2004 | |||
| EP 1866888 B1, 08.10.2008 | |||

