Изобретение относится к авиации и может быть использовано как на борту летательного аппарата, так и в наземных средствах управления воздушным движением и подготовки летчика к полетам при решении навигационно-пилотажных задач на различных этапах полета для всех типов ЛА.
Известен интегральный дисплей ЛА (Roscoe S.N., Corl L., Jensen R. Display dynamics revisited// Human factors, V. 23, N3. р. 341-353. - 1981), в состав которого входят блоки формирования : силуэта собственного летательного аппарата, вектора прогнозного движения собственного летательного аппарата, точки наведения вектора прогнозного движения летательного аппарата, линии горизонта, заданной траектории движения, ориентировав и взлетно-посадочной полосы, линейных оцифрованных шкал и числовых значений параметров движения, а также кабинного видеотерминала, при этом входы блоков формирования соединены с выходами пилотажно-навигационного комплекса, а выход блока формирования линейных оцифрованных шкал и числовых значений параметров движения соединен соответственно с первым входом кабинного видеотерминала.
Это позволяет индицировать на экране интегрального дисплея графические образы и символы: силуэт ЛА, совмещенный с направлением вектора скорости в земной системе координат, линию горизонта, прогнозную и заданную траекторию движения с ее проекцией на земле, точку наведения прогнозной траектории движения, ВПП, линейные оцифрованные шкалы скорости и высоты с цифровыми значениями скорости, высоты, курса.
Недостатки известного интегрального дисплея сводятся к следующему:
1. Он не использует синтезатор изображения (аппаратное средство), что не позволяет, с одной стороны, расширить возможности прикладных программ за счет исключения операций, связанных с графическим представлением объектов, а с другой стороны - повысить степень реалистичности сцены, что в свою очередь не позволяет улучшить понимание и анализ сложной полетной ситуации.
2. На дисплее присутствуют графические образы, которые не используются в теоретических курсах подготовки летного состава, что не способствует быстрому освоению интегрального дисплея.
3. Не решен вопрос о естественной кинематической и динамической взаимосвязи параметров движения ЛА, что существенно ухудшает распределение внимания по информационному полю индикатора.
4. Не обеспечивается реализация принципа преследующего слежения с передвижением, что снижает точность пилотирования.
5. Присутствует искусственно введенный командный индекс, непосредственно не связанный с графическими образами полета, что снижает степень осознанности пилотирования за счет доминирования деятельности летчика как оператора.
6. Малые резервы внимания и слабая приспособленность к пилотированию в особых ситуациях полета, связанных с отказами, повреждения и внешними воздействиями за счет невозможности точного дозирования отклонений рычагов управления при балансировке ЛА для выполнения установившегося полета.
7. Не предусмотрена символика прогноза изменения параметров движения (скорости, высоты, углов атаки, скольжения) и прогноза траектории в целом для своевременного предупреждения о возможных летных происшествиях, которая пассивным образом обеспечивает безопасность пилотирования ЛА в непосредственной близости к ограничениям.
8. При интенсивном маневрировании с большими углами крена возможна потеря летчиком пространственной ориентировки и значительное ухудшение восприятия информации о наземной и воздушной обстановке.
9. Не обеспечивается точное выдерживание скорости полета.
10. Имеют место ошибки летчика в технике пилотирования при выполнении маневров, требующих высококоординированных действий летчика рычагами управления.
11. Не обеспечивается распознавание большого числа графических образов и определение их взаимного расположения относительно своего ЛА, ослаблен эффект перспективности псевдообъемного изображения, а это, в свою очередь, не позволяет летчику быстро и правильно принять решение в сложной обстановке.
12. С помощью интегрального дисплея невозможно реализовать единый способ пилотирования ЛА для различных этапов полета и типов ЛА (в том числе с органами непосредственного управления силами, космических ЛА и т.д.), что затрудняет переход с одного этапа полета на другой и переучивание с одного типа ЛА на другой.
Целью изобретения является повышение точности пилотирования с одновременным снижением психофизиологической нагрузки на летчика и обеспечение безопасности полета.
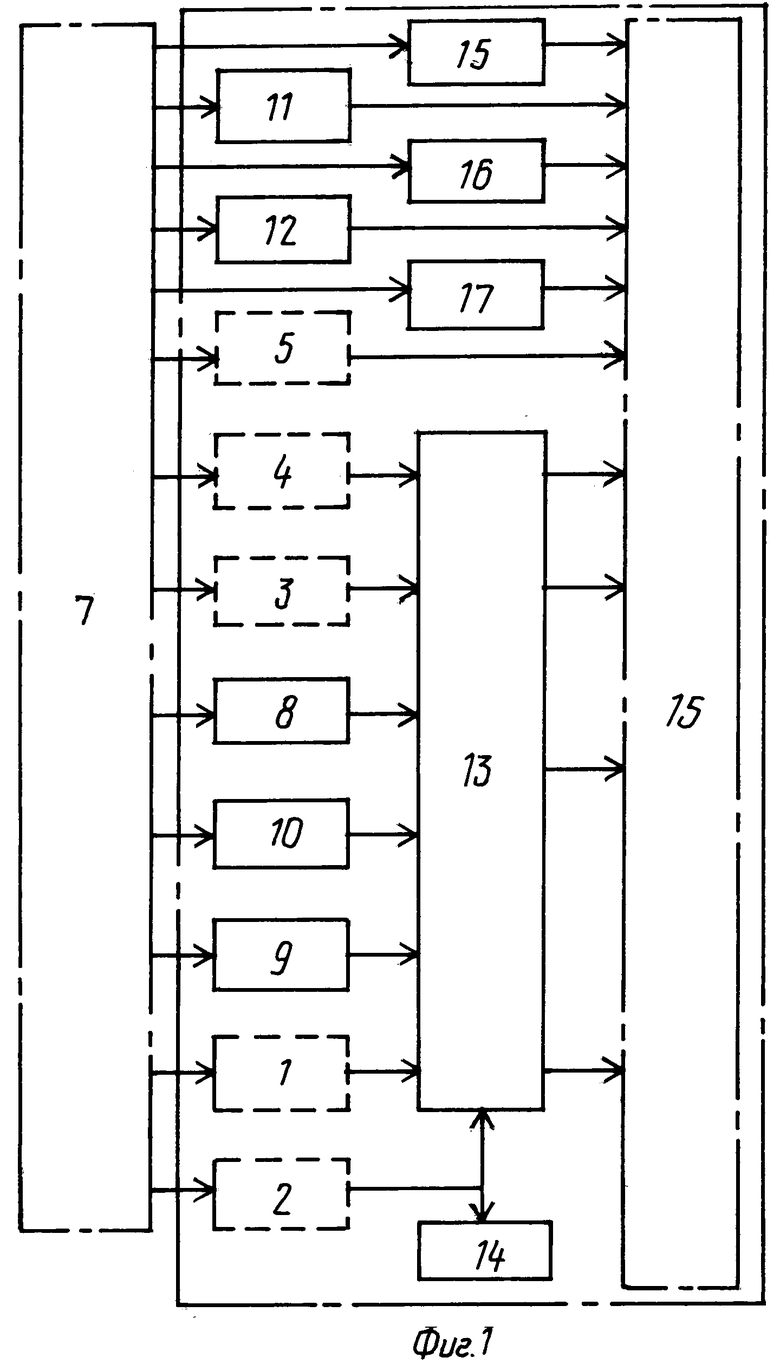
Поставленная цель достигается тем, что в известном интегральном дисплее на экран дополнительно введены графические образы и символы, индикация которых обеспечивается посредством того, что в него введены блоки формирования рельефа местности, силуэта летательного аппарата, находящегося в зоне видимости летательного аппарата, с вектором прогнозного движения, запретной области полета летательного аппарата, ограничений на углы атаки и скольжения, скорость и высоту, заданных и прогнозных значений скорости и высоты, входы которых соединены с соответствующими выходами пилотажно-навигационного комплекса, а также блок формирования псевдообъемных графических образов полета и индикатор на лобовое стекло, при этом выход блока формирования вектора прогнозного движения собственного летательного аппарата подключен соответственно ко входу индикатора на лобовое стекло и первому входу блока формирования псевдообъемных графических образов полета, ко второму, третьему, четвертому, пятому, шестому и седьмому входам которого подключены соответственно блоки формирования силуэта собственного летательного аппарата, силуэта летательного аппарата, находящегося в зоне видимости летательного аппарата, с вектором прогнозного движения, запретной области полета летательного аппарата, рельефа местности, точки наведения вектора прогнозного движения, линии горизонта, заданной траектории движения, ориентиров и взлетно-посадочной полосы, а его выход подключен соответственно ко второму входу кабинного видеотерминала, к третьему и четвертому входам которого подключены соответственно блоки формирования ограничений на углы атаки и скольжения, скорость на высоту и заданных и прогнозных значений скорости и высоты.
Это позволяет дополнительно индицировать на экране дисплея следующие графические образы: мажоранту рельефа местности, сечение рельефа в направлении полета, запретную область полета, силуэт другого ЛА с вектором прогнозного движения, а также символы пилотажных ограничений на углы атаки и скольжения, скорость и высоту, кроме того, на линейных шкалах скорости и высоты имеются заданные и прогнозные значения этих параметров.
Рассмотрим состав блоков формирования графических образов полета. Блок формирования силуэта собственного летательного аппарата в виде параллельно соединенных блоков нормирования текущих значений углов атаки и скольжения к их предельно допустимым значениям (полученным из многомерных ограничений), учета конфигурации летательного аппарата и задания положения наблюдателя, при этом их выходы объединены и служат вторым входом блока формирования псевдообъемных графических образов, а входы их объединены и через общую шину подключены ко второму выходу пилотажно-навигационного комплекса; блок формирования ограничений на углы атаки и скольжения, скорость и высоту выполнен в виде последовательно соединенных блока задания многомерных ограничений по сваливанию, прочности конструкции, аэроинерционному самовращению, потери управляемости и устойчивой работе двигателя, блока приведения многомерных ограничений к двумерным по углам атаки и скольжения и одномерным по скорости и высоте с учетом рельефа местности, препятствий, разрешенных эшелонов, блока вычисления координат векторов движения летательного аппарата, при этом выход блока вычисления координат вектора является четвертым входом кабинного видеотерминала, а вход блока задания многомерных ограничений через общую шину подключен к десятому выходу пилотажно-навигационного комплекса, блок формирования линии горизонта, заданной траектории движения, ориентиров и взлетно-посадочной полосы выполнен в виде параллельно соединенных блоков заданных маршрутов, маяков и профилей полета, точек коррекции и ориентиров, схем захода на посадку и взлета, опасных зон и характеристик взлетно-посадочной полосы, блока расчета траекторий обхода опасных зон, облета рельефа местности и препятствий, траекторий снижения, отворота и посадки в экстремальных случаях, блока обработки информации о наблюдаемых ориентирах, рельефе местности, препятствиях и влетно-посадочной полосы и блока задания положения наблюдателя, при этом их выходы объединены и служат входом блока комплексирования информации и выбора приоритетов индикации, выход которого является седьмым входом блока формирования псевдообъемных графических образов полета, а входы блока расчета траектории обхода опасных зон облета рельефа местности и посадки в экстремальных случаях, блока обработки и информации о наблюдаемых ориентирах, рельефе местности, препятствиях и взлетно-посадочной полосе и блока задания положения наблюдателя объединены и через общую шину подключены к седьмому выходу пилотажно-навигационного комплекса; блок формирования рельефа местности выполнен в виде параллельно соединенных блока прогноза движения летательного аппарата, блока вычисления мажоранты рельефа местности и сечения рельефа в направлении полета и блока задания положения наблюдателя, при этом их выходы объединены и служат пятым входом блока формирования псевдообъемных графических образов полета, а входы объединены и через общую шину подключены к пятому выходу пилотажно-навигационного комплекса; блок формирования запретной области полета выполнен в виде блока комплексирования информации и ранжировки запретных областей по степени опасности и четырех параллельно соединенных блоков обработки радиолокационной и оптоэлектронной информации, приема информации с пунктом управления воздушным движением, заданных запретных областей полета и задания положения наблюдателя, выходы которых объединены и служат входом блока комплексирования информации и ранжировки запретных областей по степени опасности, выход которого является четвертым входом блока формирования псевдообъемных графических образов полета, входы блока обработки радиолокационной и оптоэлектронной информации, блока приема информации с пунктов управления воздушным движением и блока задания положения наблюдателя объединены и через общую шину подключены к четвертому выходу пилотажно-навигационного комплекса; блок формирования точки наведения вектора прогнозного движения летательного аппарата (из условия реализации рационального переходного процесса вывода самолета на задаваемую траекторию) выполнен в виде параллельно соединенных блока вычисления точки наведения (из условия реализации рационального переходного процесса вывода самолета на задаваемую траекторию), блока вычисления размеров точки наведения (в виде "креста" для выдерживания заданной скорости полета) и блока задания положения наблюдателя, при этом их выходы объединены и служат шестым входом блока формирования пневдообъемных графических образов, а входы объединены и через общую шину подключены к шестому выходу пилотажно-навигационного комплекса, блок формирования силуэта летательного аппарата с вектором прогнозного движения выполнен в виде последовательно соединенных блока обработки радиолокационной и оптоэлектронной информации и блока вычисления местоположения летательного аппарата и его прогноза движения с идентификацией типа летательного аппарата, и параллельно подключенному к ним блока задания положения наблюдателя, при этом выходы блока вычисления положения летательного аппарата и его прогноза движения с идентификацией типа летательного аппарата и блока задания положения наблюдателя объединены и являются третьим входом блока формирования псевдообъемных образов полета, а входы блоков обработки радиолокационной и оптоэлектронной информации и задания положения наблюдателя объединены и через общую шину подключены к третьему выходу пилотажно-навигационного комплекса: блок формирования заданных и прогнозных значений скорости и высоты выполнен в виде параллельно соединенных блока вычисления прогнозных значений скорости и блока заданных скоростей и высоты (обеспечивающих движение ЛА по задаваемым траекториям), входы которых объединены и через общую шину подключены к девятому выходу пилотажно-навигационного комплекса, а выходы объединены и служат входом блока вычисления координат вектора, выход которого является третьим входом кабинного видеотерминала, блок формирования линейных оцифрованных шкал скорости и высоты выполнен в виде последовательно соединенных блока вычисления координат векторов и символов и блока логического высвечивания шкал, при этом выход блока логического высвечивания шкал является первым входом кабинного видеотерминала, а вход блока вычисления координат векторов и символов через общую шину подключен к восьмому выходу пилотажно-навигационного комплекса.
В результате силуэт ЛА выполнен в виде треугольника (вид ЛА сзади) с ограничением вершины отрезком, параллельным основанию. В силу естественной кинематической связи угловых параметров движения ЛА превышение вершиной треугольника линии горизонта свидетельствует о положительном угле тангажа. Прогнозная траектория представлена вектором, начинающимся от направления вектора скорости и заканчивающимся кольцом. Вектор прогнозного движения ЛА соединяет текущую и прогнозную точку положения самолета в пространстве. Заданная траектория изображается линией с изменяющейся толщиной, соединенной вертикальными отрезками со своей пунктирной проекцией на плоской поверхности, горизонт разделяет границу лобового стекла на две части - небо и землю рельеф местности показан линией мажоранты и линией сечения рельефа вертикальной плоскостью вдоль предполагаемого направления полета, запретные области полета представлены сложными замкнутыми поверхностями, точка наведения вектора прогнозного движения собственного ЛА обозначена крестом и движется впереди ЛА по заданной траектории на определенном удалении от него, другой ЛА выполнен в виде двух треугольников, меньший из которых - киль, в ракурсе со свои вектором прогнозного движения, заданные значения скорости и высоты нанесены на шкалах в виде крестов, а прогнозные значения этих параметров в виде колец на концах прогнозных векторов. Линейные оцифрованные шкалы высвечиваются отрезками и точками (если прогнозные значения скорости и высоты менее заданных) от нулевых значений до текущих, а при положительных прогнозных значениях скорости и высоты шкалы раскрываются этих значений только точками. Динамическая связь между векторами прогноза и отслеживаемыми ими графическими образами и символами заключается в том, что первые являются приближенно производными по отношению ко вторым.
Каждый из графических образов имеет свой цвет: силуэт собственного ЛА и другого ЛА с векторами прогнозного движения имеют желтый цвет, рельеф окрашен в коричневый цвет, заданная траектория полета, соединенная вертикальными линиями со своей проекцией и ВПП - зеленый цвет, запретная область полета - розовая, земля ниже горизонта - серая, а небо - голубое, круг на векторе прогнозного движения - бесцветный, крест на заданной траектории - желтый, причем эффект полупрозрачности графических образов обеспечивают тем, что через закрашенный графический образ видны очертания образа, находящегося за ним.
В интегральный дисплей дополнительно введены блоки формирования нелинейных оцифрованных шкал по углам наклона траектории и пути, круга в зените небесной сферы и линий на плоской поверхности земли, при этом их входы соединены соответственно с одиннадцатым, двенадцатым и тринадцатым выходами пилотажно-навигационного комплекса, а выходы соединены соответственно с пятым, шестым и седьмым входами кабинного видеотерминала.
Блок формирования линий на плоской поверхности выполнен в виде блока вычисления координат вектора и двух параллельно соединенных блока задания размеров и изображаемого квадрата на плоской поверхности земли и блока задания степени перспективности изображаемой сетки на земной поверхности, при этом их выходы объединены и являются входом блока вычисления координат векторов, выход которого является седьмым входом кабинного выдеотерминала, а вход блока задания степени перспективности изображаемой сетки на земной поверхности через общую шину подключен к тринадцатому выходу пилотажно-навигационного комплекса; блок формирования нелинейно оцифрованных шкал угла наклона траектории и пути выполнения в виде блока вычисления координат и символов и двух параллельных блоков, а именно, блока выбора типа нелинейности шкалы и блока задания размера изображаемого квадрата на плоской поверхности земли, при этом их выходы объединены и являются входом блока вычисления координат и символов, выход которого является пятым входом кабинного видеотерминала, а вход блока задания размера изображаемого квадрата на плоской поверхности земли через общую шину подключен к одиннадцатому выходу пилотажно-навигационного комплекса.
Это позволяет в случае отсутствия на экране дисплея информации о заданной траектории, рельефе местности, запретной области полета и другом ЛА индицировать в месте расположения силуэта ЛА отметки угла наклона траектории и на линии горизонта отметки угла пути в виде участков нелинейных шкал, причем, на восходящих маневрах на отметке 90о имеется эллипс, который переходит в круг с увеличением текущего угла наклона траектории до 90о и воспринимается летчиком как срез небесной сферы в зените. Это позволяет на качественном уровне определять величину угла наклона траектории. При углах наклона траектории, близких к 90о, на эллипсе появляются отметки шкалы курса. На нисходящих маневрах от линии горизонта и горизонта расходятся прямые линии, расположение которых и количество зависят от угла наклона траектории и высоты полета. Эти линии воспринимаются летчиком как параллельные линии на плоской поверхности земли вдоль вектора скорости и образуют с нелинейно оцифрованной шкалой угла наклона траектории квадраты на плоскости земли. В целом обеспечивается эффект "набегания" земли при пикировании.
На фиг. 1 представлена схема интегрального навигационно-пилотажного дисплея 18, на которой пунктиром показаны блоки и связи известного устройства.
Блоки формирования: 1 - силуэта собственного ЛА; 2 - вектора прогнозного движения собственного ЛА; 3 - точки наведения вектора прогнозного движения ЛА; 4 - горизонта, заданной траектории движения и ВПП; 5 - линейных оцифрованных шкал и числовых значений параметров; 8 - рельефа местности; 9 - силуэта другого ЛА с вектором прогнозного движения; 1, - запретной области полета ЛА; 11 - ограничений на углы атаки и скольжения, скорость и высоту; 12 - заданных и прогнозных значений скорости и высоты; 13 - псевдообъемных графических образов полета; 15 - нелинейных оцифрованных шкал по углам наклона траектории и пути; 16 - круга в зените небесной сферы; 17 - линии на плоской поверхности, а также 6 - кабинный видеотерминал; 7 - пилотажно-навигационный комплекс; 14 - индикатор на лобовое стекло.
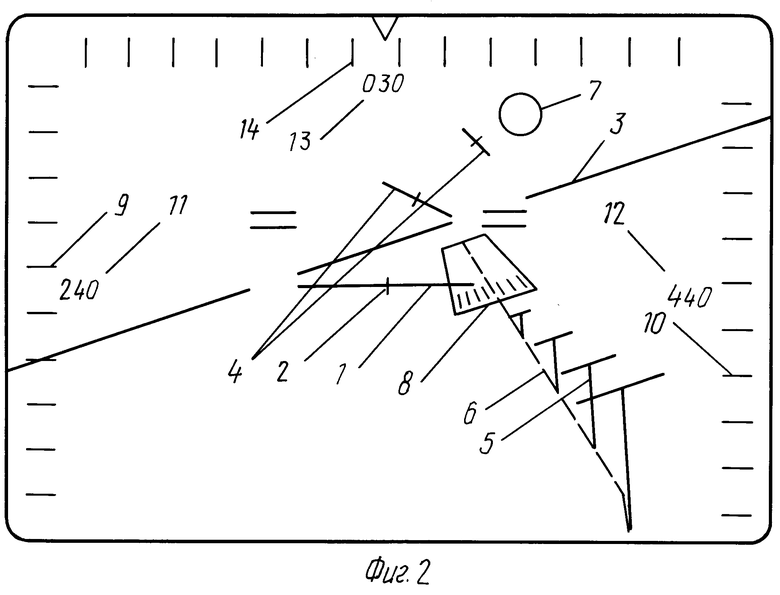
На фиг. 2 показан вид экрана интегрального индикатора для реализации способа пилотирования ЛА с помощью командного индекса, который содержит: 1 - силуэт ЛА; 2 - направление вектора скорости; 3 - линию горизонта; 4 - прогнозную траекторию движения ЛА, состоящую из 2-х силуэтов ЛА; 5 - заданную траекторию полета, состоящую из Т-образных профилей, 6 - проекцию заданной траектории на поверхность земли (центральная линия); 7 - командный индекс; 8 - взлетно-посадочную полосу (ВПП); 9 - подвижное поле, характеризующее изменение скорости; 10 - подвижное поле, характеризующее изменение высоты; 11 - числовое значение текущей скорости; 12 - числовое значение текущей высоты; 13 - числовое значение текущего угла рыскания; 14 - подвижное поле, характеризующее изменение угла рыскания; 15 - индекс углового положения.
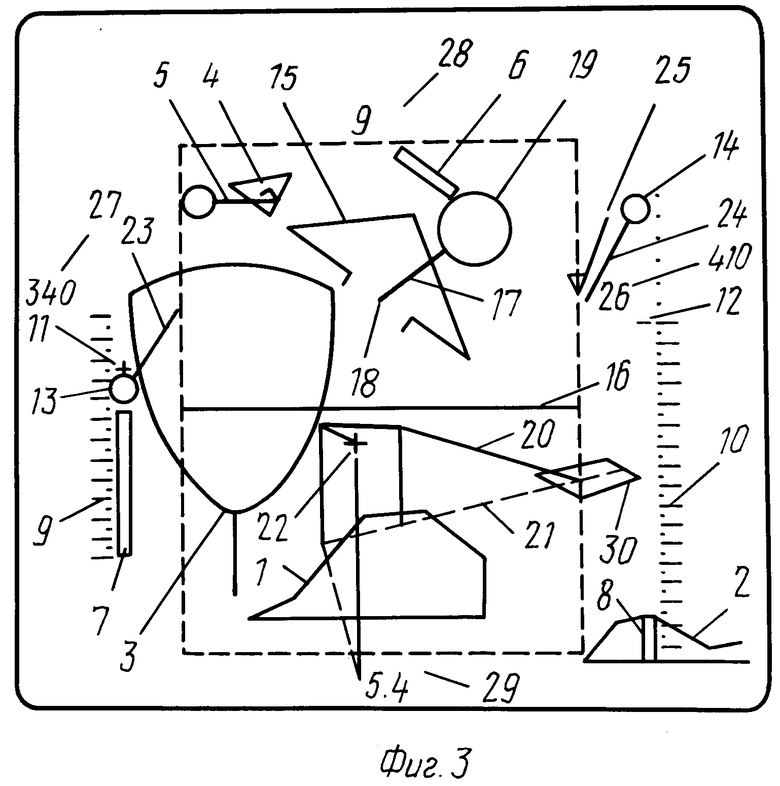
На фиг. 3 показан вид экрана интегрального пилотажно-навигационного дисплея, который содержит: 1 - мажоранту рельефа местности; 2 - сечение рельефа местности вертикальной плоскостью, проходящей через вектор прогнозного движения ЛА; 3 - запретную область полета; 4 - другой ЛА; 5 - вектор прогнозного движения другого ЛА; 6 - ограничение на углы атаки и скольжения; 7 - минимально допустимую скорость; 8 - минимально допустимую высоту; 9 - оцифрованную подвижную шкалу скорости; 10 - оцифрованную шкалу высоты; 11 - заданное значение скорости; 12 - заданное значение высоты; 13 - прогнозное значение скорости; 14 - прогнозное значение высоты; 15 - силуэт ЛА в виде плоскости крыла (вид ЛА сзади); 16 - линию горизонта; 17 - вектор прогнозного движения ЛА; 18 - направление вектора скорости; 19 - конец вектора прогнозного движения в виде кольца; 20 - заданную траекторию полета; 21 - проекцию заданной траектории полета на поверхность земли; 22 - точку наведения прогнозного движения ЛА, расположенную на заданной траектории полета; 23 - вектор прогнозного изменения скорости; 24 - вектор прогнозного изменения высоты; 25 - силуэт ЛА (вид сбоку); 26 - числовое значение текущей высоты; 27 - числовое значение текущей скорости; 28 - числовое значение текущего угла пути; 29 - числовое значение удаления до поворотного или конечного пункта маршрута, до запретной зоны полета или другого ЛА; 30 - взлетно-посадочную полосу (ВПП).
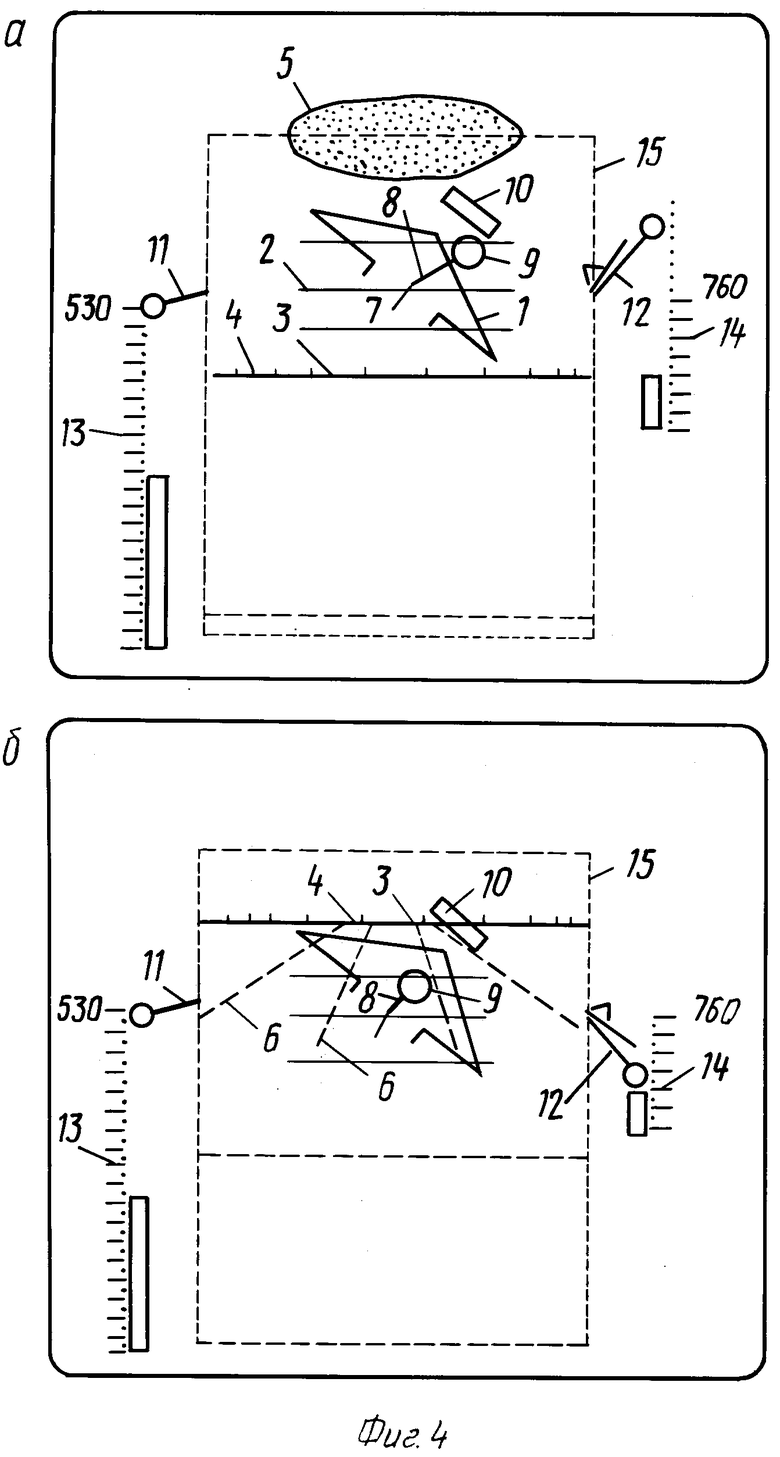
На фиг. 4 показан вид экрана интегрального пилотажно-навигационного дисплея при свободном маневрировании, который содержит: 1 - силуэт ЛА; 2 - отметки угла наклона траектории; 3 - линию горизонта; 4 - отметки угла пути; 5 - круг в зените небесной сферы; 6 - параллельные линии на поверхности земли; 7 - направление вектора скорости; 8 - вектор прогнозного движения; 9 - конец вектора прогнозного движения в виде кольца; 10 - ограничение на углы атаки и скольжения; 11 - прогнозный вектор скорости; 12 - прогнозный вектор высоты; 13 - оцифрованную шкалу скорости; 14 - оцифрованную шкалу высоты; 15 - границу "окна".
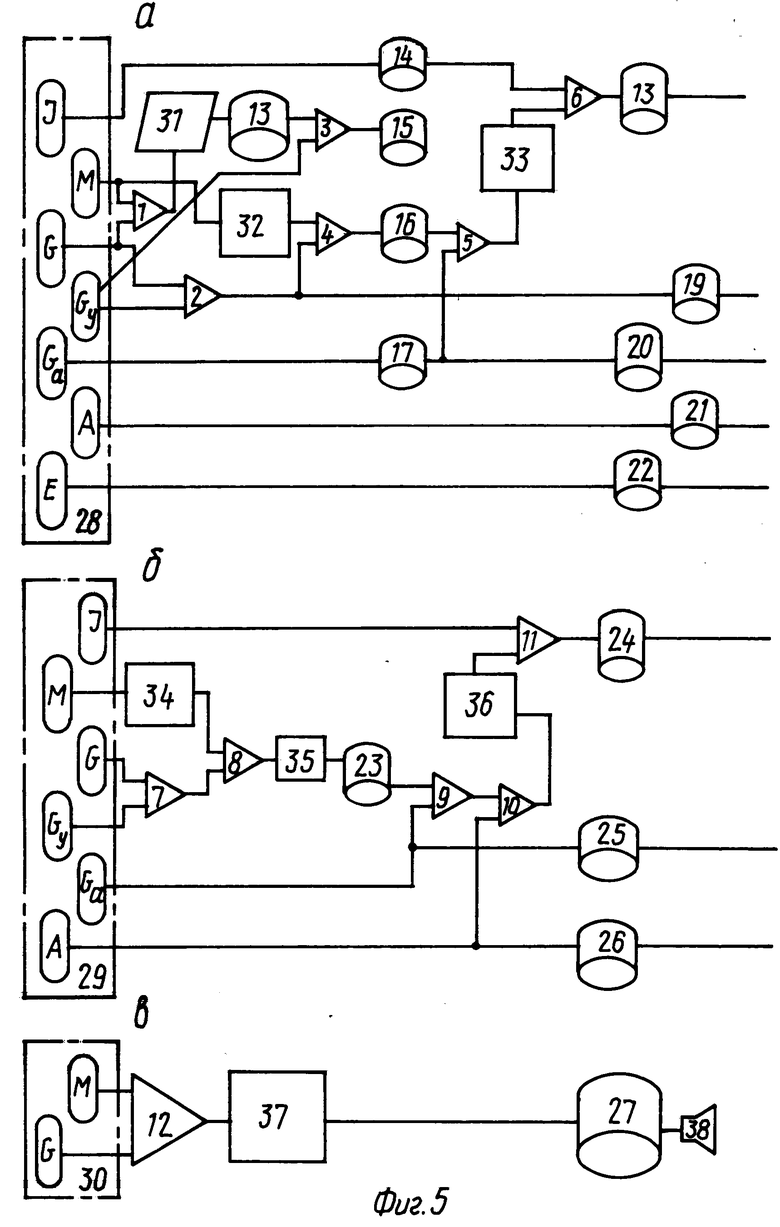
На фиг. 5 представлены схемы блока формирования псевдообъемных графических образов полета (а), (б) и видеотерминала (в): 1-12 - преобразователи; 13-27 - блоки памяти; 28, 29, 30 - блоки формирования графических образов полета.
На фиг. 5а представлена схема реализующая заполнение элементов графических образов полета, где: 31 - блок статических приоритетов; 32 - генератор контуров; 33 - блок заполнения контуров.
На фиг. 5б представлена схема, реализующая каркасные элементы графических образов полета, где: 34 - генератор окружностей; 35 - генератор векторов; 36 - блок цифровых векторов.
На фиг. 5в представлена схема видеотерминала, где: 37 - генератор векторов и символов; 38 - монитор.
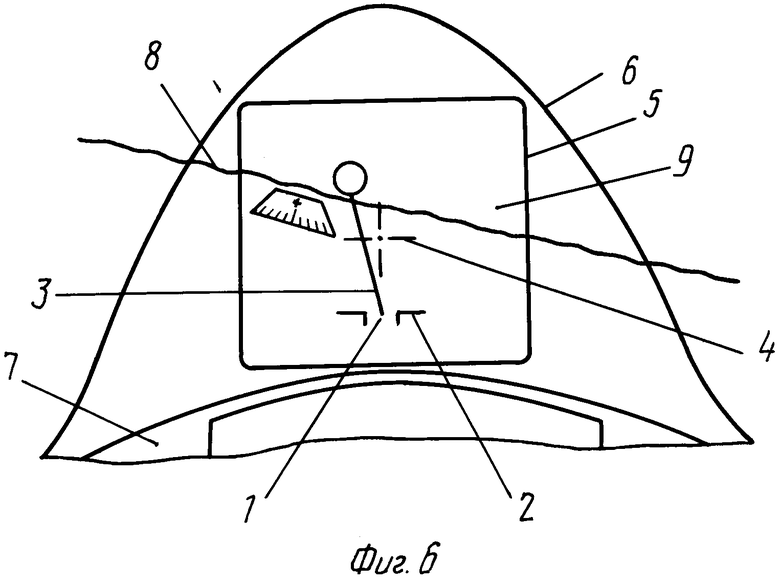
На фиг. 6 представлен вид экрана индикатора на лобовом стекле: 1 - направление вектора скорости; 2 - силуэт ЛА; 3 - вектор прогнозного движения ЛА; 4 - центр лобового стекла (направление продольной оси ЛА); 5 - граница экрана; 6 - фонарь; 7 - приборная доска; 8 - линия естественного горизонта; 9 - экран кабинного видеотерминала.
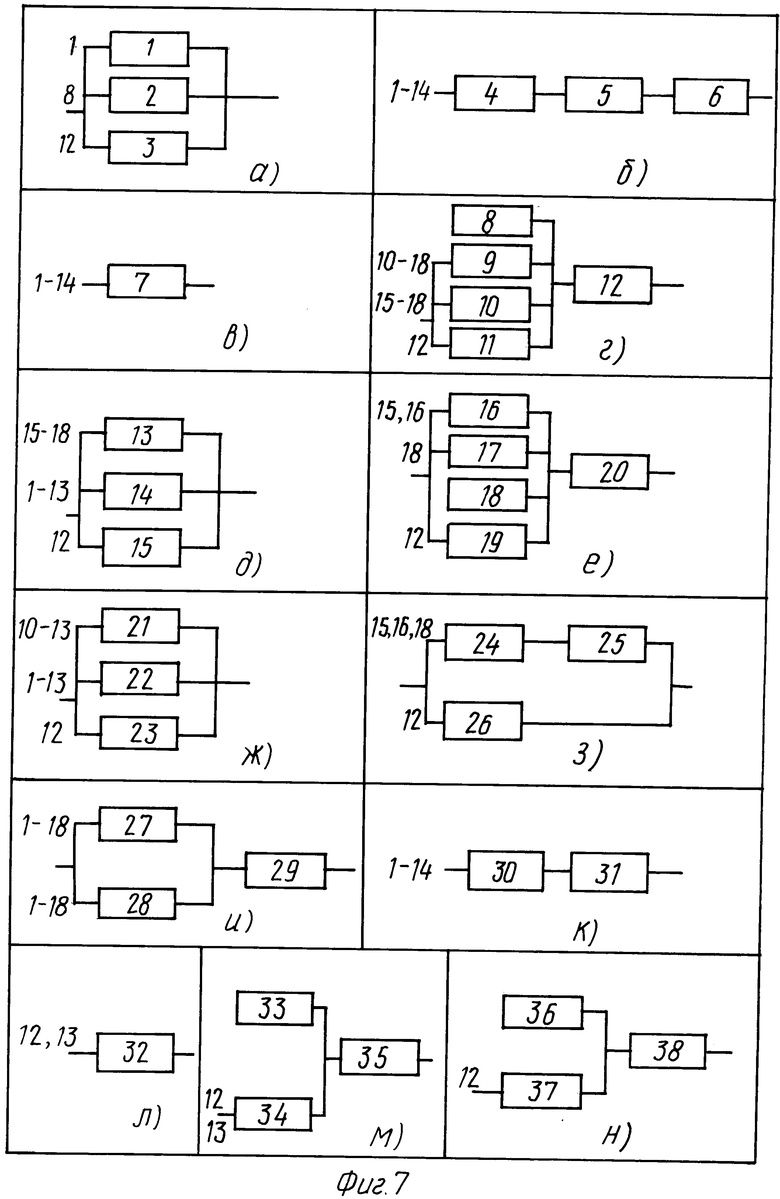
На фиг. 7 представлены схемы блоков формирования графических образов:
a - блок формирования силуэта собственного ЛА состоит из трех блоков: 1 - нормирования текущих значений углов атаки и скольжения к их предельно допустимым значениям (полученным из многомерных ограничений). 2 - учета конфигурации ЛА, 3 - задания положения наблюдателя;
б - блок формирования ограничений на углы атаки и скольжения, скорость и высоту состоит из трех блоков: 4 - задания многомерных ограничений по сваливанию, прочности конструкции, аэроинерционному самовращению, потере управляемости и устойчивой работе двигателя, 5 - приведения многомерных ограничений к двумерным по углам атаки и скольжения и одномерным по скорости и высоте с учетом рельефа местности, препятствий, разрешенных эшелонов, 6 - вычисления координат векторов;
в - блок вектора прогноза движения собственного ЛА состоит из одного объединенного блока: 7 - задания гипотез прогнозного движения, вычисления прогноза с оценкой его точности для выбора наилучшей гипотезы;
г - блок горизонта, заданной траекториии движения, ориентиров и ВПП состоит из пяти блоков: 8 - заданных маршрутов, маяков и профилей полета, точек коррекции и ориентиров, схем захода на посадку и взлетов, опасных зон и характеристик ВПП, 9 - расчета траекторий обхода опасных зон, облета рельефа местности и препятствий, траекторий снижения, отворота и посадки в экстремальных случаях, 10 - обработки информации о наблюдаемых ориентирах, рельефе местности, препятствиях и ВПП, 11 - блока задания положения наблюдателя, 12 - блока комплексирования информации и выбора приоритетов индикации;
д - блок рельефа местности состоит из трех блоков: 13 - прогноза движения ЛА, 14 - вычисления мажоранты рельефа местности и сечения рельефа в направлении полета, 15 - блока задания положения наблюдателя;
е - блок запретной области полета состоит из пяти блоков:
16 - обработки радиолокационной и оптоэлектронной информации, 17 - приема информации с пунктов управления воздушным движением, 18 - заданных запретных областей полета, 19 - блока задания положения наблюдателя, 20 - блока комплексирования информации и ранжировки запретных областей по степени опасности;
ж - блок точки наведения вектора прогнозного движения ЛА состоит из трех блоков: 21 - вычисления точки наведения (из условия реализации рационального переходного процесса вывода самолета на задаваемую траекторию), 22 - вычисления размеров точки наведения (в виде "креста") для выдерживания заданной скорости полета, 23 - блока задания положения наблюдателя;
з - блок силуэта другого ЛА с вектором прогнозного движения состоит из трех блоков: 24 - обработки радиолокационной, оптоэлектронной информации, информации от системы межсамолетной навигации и информации, поступающей с наземных комплексов, 25 - блока вычисления положения другого ЛА и его прогноза движения с идентификацией типа ЛА, 26 - блока задания положения наблюдателя;
и - блок заданных и прогнозных значений скорости и высоты состоит из трех блоков: 27 - вычисления прогнозных значений скорости и высоты, 28 - заданных значений скорости и высоты (обеспечивающих движение ЛА по задаваемым траекториям), 29 - блока вычисления координат векторов;
к - блок линейных оцифрованных шкал скорости и высоты состоит из двух блоков: 30 - вычисления координат векторов и символов, 31 - логического высвечивания шкал с учетом прогнозных значений скорости и высоты;
л - блок круга в зените небесной сферы состоит из одного объединенного блока: 32 - блока вычисления параметров эллипса (со шкалой курса) и его координат;
м - блок линий на плоской поверхности состоит из трех блоков: 33 - задания размеров изображаемого квадрата на плоской поверхности земли, 34 - задания степени перспективности изображаемой сетки на земной поверхности, 35 - блока вычисления координат векторов;
н - блок нелинейно оцифрованных шкал угла наклона траектории и пути состоит из трех блоков: 36 - выбора типа нелинейности шкалы, 37 - задания размера изображаемого квадрата на плоской поверхности земли, 38 - вычисления координат и символов.
Из пилотажно-навигационного комплекса в блоки формирования поступает следующая информация: 1 - углы атаки и скольжения; 2 - производные углов атаки и скольжения; 3 - угловые скорости вращения ЛА вокруг связанных осей координат; 4 - отклонения управляющих органов; 5 - режим работы двигателей; 6 - перегрузки вдоль связанных осей координат; 7 - углы ориентации ЛА связанной системы координат; 8 - информация о конфигурации ЛА; 9 - приборная скорость; 10 - ускорения в земной системе координат; 11 - скорости в земной системе координат; 12 - углы ориентации вектора скорости в земной системе координат; 13 - координаты положения ЛА в пространстве; 14 - остаток топлива; 15 - радиолокационная информация (метео, рельеф, другой ЛА, ориентиpы); 16 - оптоэлектронная информация (аналогичного типа); 17 - цифровая информация о рельефе местности (цифровая карта); 18 - информация по радиолинии связи с наземными пунктами управления.
Пилотажно-навигационный комплекс измеряет навигационно-пилотажные параметры собственного ЛА и других объектов и объединяет подсистемы, которые дополняют и корректируют друг друга: радиосистемы ближней и дальней навигации (РСБН, РСДН), радиомаячную систему, спутниковую систему навигации, доплеровскую систему измерения путевой скорости и угла сноса (ДИСС), инерционную систему (ИНС), радиолокационную систему (РЛС), оптоэлектронную систему и лазерный дальномер, радиовысотомер (РВ), систему воздушных сигналов (СВС), датчики уголв атаки (ДУА) и скольжения, перегрузок (ДЛП), угловых скоростей (ДУС), гировертикаль (ГВ), систему межсамолетной навигации. Информация о положении собственного ЛА и других объектов в пространстве, а также их форме и габаритов может определяться не только на борту, но и передаваться с наземных пунктов управления по радиолиниям. В комплексе имеется информация о направлении вектора скорости в земной системе координат.
Блоки формирования графических образов 4, 3, 8, 10, 9, 1, 2 (фиг. 1) в соответствии с классификацией информации для изображаемого объекта с наименованием 1 задают: форму М, присущую каждому объекту независимо от положения наблюдателя: внешний вид А, характеризующий облик объекта независимо от условий его освещения такими параметрами как цвет, текстура, яркость, прозрачность; геометрию G, содержащую данные о положении объекта в пространстве и направлении взгляда наблюдателя Gx, а также расположение изображения объекта на экране монитора Ga; освещение Е, для чего указывается природа и расположение источников света, а также условия видимости (в том числе радиолокационной и оптоэлектронной), такие как туман, дым, атмосферные явления, помехи; структуру S, т.е. отношения, связывающие объекты между собой: близость, касание и изменяющие предыдущую информацию, вплоть до упразднения, уничтожения объектов.
Блок формирования псевдообъемных графических образов полета 13 (фиг. 1) визуализирует как заполнение элемента (плоские грани) изображений (фиг. 5а), так и каркасные элементы типа "проволочная графика" (фиг. 5б) на видеотерминале 6 (фиг. 1).
Видеотерминал также имеет собственный генератор векторов и символов 37 (фиг. 5в), который позволяет непосредственно визуализировать изображение, задаваемое формирующими блоками 10, 11, 12, 13 (фиг. 1).
В качестве примера рассмотрим заход на посадку вне визуальной видимости земли. На фиг. 3 изображен момент подлета ЛА к четвертому развороту. Подход к ВПП имеет пересеченный рельеф 1, 2. По курсу слева расположена запретная по метеоусловиям область полета 3 и летящий влево другой ЛА 4. Летательный аппарат находится на удалении 5. 4 км 29 до разворота, на высоте 410 м 26, скорость 340 км/ч 27, с курсом 9 градусов 28, в наборе высоты с торможением 23 в правом крене с запасом по углу атаки более четверти диапазона от предельно допустимого значения 6, практически без скольжения. В сложившейся полетной ситуации летчик уклоняется вправо вверх 19 от опасной по метеоусловиям области полета 3. Для выведения ЛА на заданную траекторию полета 20 летчик должен кольцом 19 отслеживать крест 22 и окаймлять его, не нарушая при этом условий безопасности полета. В результате ЛА асимптотически выйдет на заданную траекторию. На протяжении всего захода летчик осуществляет преследующее слежение с предвидением, так как известна траектория 20, по которой будет перемещаться крест 22. Летчик имеет возможность выполнить 4-й разворот строго в горизонтальной плоскости, наложив вектор прогноза 17 на горизонт 16. Для выдерживания скорости планирования летчик окаймляет крест 22 кольцом 19. Следует отметить, что угол наклона глиссады и скорость планирования на ней могут быть выбраны наилучшим образом, исходя из типа ЛА, посадочного веса, подходов к аэродрому, метеоусловий, размеров ВПП и ее состояния, а также других условий. При ограниченном запасе топлива летчик имеет возможность не лететь к 4-му развороту на крест 22, а лететь сразу в район дальнего привода с нацеливанием вектора скорости 18 непосредственно в траекторию снижения для сокращения времени захода. Опасность пилотирования на этом режиме определяется прежде всего возможной потерей скорости (прогнозное значение скорости 13 близко к предельно допустимому значению скорости 7) и, как следствие, приближением угла атаки (вершины треугольника 15) к предельно допустимому значению 6, а также попаданием ЛА в запретную область полета 3 и столкновением с землей 1 и другим ЛА 4. В случае отказа одного из двигателей летчик для совершения прямолинейного полета отклоняет рычаги таким образом, чтобы удержать кольцо 19 в середине силуэта ЛА 18. Аналогичным образом летчиком парируются сильные внешние возмущения (турбулентность, сдвиг ветра и другие). На конечном участке захода на посадку, если на высоте принятия решения посадка разрешена, крест 22 перемещается на ВПП, а в противном случае представляется траектория повторного захода на посадку. При посадке при нулевой видимости на высоте начала выравнивания крест 22 плавно перемещается по ВПП, так что при слежении за ним кольцом 19 обеспечивается процесс выравнивания и приземления.
При свободном маневрировании ЛА (фиг. 4) безопасность полета обеспечивается тем, что летчик начало вывода из пикирования (для избежания столкновения с землей) определяет по расстоянию между расходящимися внутренними линиями 6: если расстояние больше отметок угла наклона траектории 2, то необходимо начать вывод. При этом летчик контролирует нижнюю точку маневра по концу вектора прогноза высоты 12. На восходящих маневрах эллипс 5 дает на качественном уровне информацию о величине угла наклона траектории.
На лобовое стекло 5 (фиг. 6) выведена только та минимально необходимая информация, которая может быть использована для непосредственного ее совмещения с визуальными объектами. К таким объектам можно отнести взлетно-посадочную полосу (ВПП), ориентиры на земной поверхности, рельеф местности, область грозовой деятельности (запретную область полета), другой ЛА.
При выполнении посадки на ее конечном участке летчик нацеливает вектор скорости в вынесенную точку на ВПП, для чего совмещает конец вектора прогноза 3 (фиг. 6) - кольцо с этой точкой. При выравнивании летчик перенацеливает конец вектора в другую точку. Аналогичным образом выполняется выход самолета на наземный ориентир и сближение с другим ЛА.
Для обеспечения безопасного пилотирования летчик не допускает наведение направления вектора скорости 1 под мажоранту видимого рельефа местности в область грозовой деятельности (запретную область полета) или в другой ЛА. Кроме того, верхняя граница экрана 5 (фиг. 1) ограничивает величину вектора прогнозного движения, однозначно связанную с перегрузкой. При больших углах атаки силуэт ЛА 2 может выйти за нижнюю границу экрана 5, а при больших углах скольжения - за боковые границы экрана. По величине диаметра кольца на конце вектора прогнозного движения 3 летчик имеет информацию о скорости полета. Легко заметить, что в основном функции вектора прогнозного движения на лобовом стекле совпадают с функциями этого вектора на экране кабинного видеотерминала.
Полунатурные испытания предлагаемого интегрального индикатора показали его высокую эффективность при выполнении маршрутного полета на малой высоте с облетом запретных областей полета и при посадке вне визуальной видимости за минимальное время в условиях ограниченного воздушного пространства, а также при полете в составе группы самолетов и свободном пространственном маневрировании.
а
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| СПОСОБ КИНЕСТАТИЧЕСКОЙ ПЕРЕДАЧИ ЛЕТЧИКУ ПИЛОТАЖНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2095279C1 |
| СПОСОБ УПРАВЛЕНИЯ МАЛОВЫСОТНЫМ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2023 |
|
RU2822805C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Способ и система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, многофункциональный, маневренный самолет с системой предупреждения столкновения с земной поверхностью | 2017 |
|
RU2664090C1 |
Изобретение относится к авиации и может быть использовано при решении навигационно-пилотажных задач на различных этапах полета для всех типов летательных аппаратов. Целью изобретения является повышение точности пилотирования при одновременном снижении психофизиологической нагрузки на летчика и обеспечения безопасности полета. Сущность изобретения: в известный интегральный дисплей, реализующий только "каркасные" изображения ограниченного числа объектов, введен блок формирования псевдообъемных графических образов полета и блоки формирования новых графических образов, позволяющие реализовать сцены высокой степени реалистичности, на которых присутствуют по новому представленные все необходимые образы полета для точного и безопасного пилотирования ЛА с одновременным снижением психофизиологической нагрузки на летчика. 5 з.п. ф - лы, 7 ил.
