Изобретение относится к области приборостроения и может быть использовано для мобильного дистанционно-неконтактного определения уровней жидкостей, находящихся внутри резервуаров произвольной формы, таких, как резервуары для хранения нефтепродуктов, воды и других жидких сред, баков автоцистерн, самолетов, автомобилей, танкеров и т.п. Данный способ позволяет определять в резервуарах уровень не только жидкостей, но и сыпучих материалов - муки, зерна, цемента, песка и т.д.
Уровень техники в данной области характеризуется приведенными ниже сведениями. Известно "Устройство для измерения глубины жидкости" [патент США 5065624, G 01 F 23/28; G 06 G 7/16, 1993г.]. Устройство позволяет измерить расстояние в жидкости с отражающей поверхностью. В устройство входят излучатель-приемник и присоединенный к нему микропроцессор. Излучатель-приемник вырабатывает расходящийся пучок импульсов лучистой энергии и принимает отраженные импульсы. Он погружен в жидкость таким образом, что импульсы поднимаются от него до отражающей поверхности жидкости, от которой они отражаются и возвращаются к приемнику. Микропроцессор выводит среднее время подъема и возврата импульса и обеспечивает точное считывание расстояния в жидкости.
Недостатком данного изобретения является то, что устройство для измерения глубины жидкости является неотъемлемым конструктивным узлом резервуара и, не являясь универсальным, непригодно для определения глубины жидкости дистанционно-неконтактным способом.
Известен "Способ контроля уровня сред в резервуаре и устройство для его осуществления" [патент РФ 2047844; G 01 F, 1995г., авторы Сафьяник Е.Б. и др. ]. Способ заключается в том, что через стенку в резервуар излучают ультразвуковые колебания, принимают их после отражения от противоположной стенки, а уровень определяют по величине ослабления сигнала в резервуаре, при этом излучение осуществляют нижним преобразователем, установленным по нижней границе измеренного уровня, а прием осуществляют n преобразователями, включая нижний, последовательно после каждого зондирующего импульса.
Недостаток способа состоит в том, что точность определения уровня среды является невысокой из-за конечной чувствительности ультразвуковых датчиков и метода измерения.
Известен "Способ измерения уровня жидких сред" [патент РФ 2143668, G 01 F 23/296, авторы Жуков Б.В. и др., 1999г.]. Способ включает излучение перпендикулярно поверхности жидкости зондирующего сигнала, прием отраженного от границы раздела сред сигнала и измерение временного интервала, функционально связанного с измеряемым уровнем, причем зондирующий и отраженный сигналы анализируют в волноведущем тракте в виде продольных акустических волн, принимают эти сигналы в первой и второй точках приема, которые располагают на фиксированном расстоянии друг от друга ниже точки излучения и вне волноводного тракта и по временным интервалам прохождения звука между первой и второй точками, а также между отраженным и испущенным сигналами определяют уровень жидкости.
Недостаток данного изобретения состоит в том, что оно не обеспечивает измерение уровня жидкости бесконтактным способом и имеет недостаточную точность измерения. Например, при наклонах резервуара волноведущий тракт также наклоняется, и уровень жидкости будет измерен не по вертикали.
Наиболее близким по технической сущности к заявляемому изобретению является "Способ геодезических измерений объемных объектов по заданным световым маркам и устройство для его осуществления" [патент РФ 2079810, 1993г., G 01 C 1/00, 3/00, авторы Арефьев А.А., Здоркин Ю.П.].
Способ заключается в том, что разбивают геодезический базис вблизи контрольного объекта, устанавливают в конечных пунктах базиса задатчик световых марок и измерительный прибор, производят взаимоориентацию измерительного прибора и задатчика световых марок, направляют лазерный пучок на контролируемый объект, задают угол наклона лазерного пучка, формируют на поверхности объекта световую марку необходимого размера, регистрируют угловые координаты световой марки при помощи измерительного прибора, последовательно изменяют пространственное положение светового пучка, одновременно измеряя координаты световой марки, повторяют эти операции необходимое число раз, а затем вычисляют пространственные координаты точек поверхности контролируемого объекта в системе координат базиса и определяют форму контролируемого объекта, причем направляемый на объект лазерный пучок разбивают не менее чем на три пучка, центральный из которых является неподвижным и соосным с осью лазерного пучка до разделения, а периферийные имеют возможность фиксированного изменения направлений относительно центрального пучка, дополнительно формируют на фрагменте контролируемой поверхности не менее двух световых марок, одна из которых, от центрального пучка, является опорной, регистрацию угловых координат производят для всех световых марок, измерение положения проводят для всех периферийных лазерных пучков, одновременно измеряя координаты всех периферийных световых марок.
Устройство состоит из лазера для задания световых марок, формирующей оптической системы с механизмом фокусировки лазерного пучка, тубуса оптической системы, механизмов поворота устройства вокруг вертикальной и горизонтальной осей, геодезического трегера, при этом на выходе формирующей оптической системы дополнительно введены светоделитель и устройство управления угловыми наклонами периферийных лазерных пучков с отсчетным механизмом.
Недостатком данного изобретения является то, что оно может быть использовано для приближенного определения уровня жидкости и других сред, находящихся в резервуаре, и не обеспечивает нужной точности измерения.
Задачей изобретения является обеспечение возможности высокоточного дистанционно-неконтактного определения уровня среды, заключенной в резервуаре.
Технический результат, который может быть получен при осуществлении заявляемого способа - это быстрое, с заданной точностью определение уровня среды в резервуаре, скрытой от наблюдения - например, в бензовозе, молоковозе, цистерне, танкере и т.д. Способ позволяет определять уровень среды и в наклонных резервуарах автомобилей, самолетов и других технических устройств.
Поставленная задача решается за счет того, что в способе дистанционно-неконтактного определения уровня среды в резервуаре, заключающемся в том, что разбивают геодезический базис вблизи контрольного объекта, устанавливают в конечных точках базиса измерительный прибор, производят взаимоориентацию измерительного прибора и задатчика световых марок, направляют лазерный луч на контрольный объект, причем в качестве измерительного прибора выступает электронная фотокамера инфракрасного диапазона электромагнитных волн со съемными светофильтрами, в качестве задатчика световых марок - лазерная линейка, устанавливаемые на геодезической подставке с уровнями, при этом оптические оси фотокамеры и лазерной линейки ориентируют параллельно друг другу и по уровням устанавливают горизонтально, на высоте 1,5-1,8 м над поверхностью Земли, направляют оптическую ось фотокамеры в определенную точку так, чтобы контрольный объект на горизонтированной опорной поверхности полностью попадал в поле зрения видоискателя электронной фотокамеры, наводят резкость и осуществляют съемку, фиксируют в компьютере расстояние до световой марки на резервуаре и фокусное расстояние фотообъектива, переносят измерительный прибор во вторую точку базиса, затем по теодолиту и видоискателю электронной фотокамеры производят горизонтальное наведение оптических лучей измерительных приборов на контролируемый резервуар, наводят резкость и осуществляют фотосъемку, переносят измерительные приборы в другие точки, осуществляют фотосъемку в i-ой точке базиса, измеряют и фиксируют в компьютере расстояние от электронной фотокамеры до световых марок на резервуаре и фокусное расстояние фотообъектива, после этого вводят полученные снимки в компьютер в формате графических файлов и производят их фотограмметрическую обработку, умножая для каждого ракурса съемки размеры на i-ом снимке на соответствующий данному снимку коэффициент увеличения Ni, равный Ni=xi/fi, (i=1, 2,...,n),
где xi-расстояние от фотокамеры до световой марки,
fi - фокусное расстояние объектива фотокамеры,
после чего определяют уровень среды в резервуаре как разность высот между низшей точкой его внутренней части и образованной горизонтальной поверхности данной среды.
Для горизонтирования резервуара по его опорной поверхности от наклоненного положения на снимке через среднюю точку линии уровня среды проводят прямую линию, параллельную линии опорной поверхности резервуара, после этого разбивают площади образованных этими прямыми двух фигур на элементарные, площади которых выбирают такой степени малости, чтобы они обеспечили заданную точность измерения, определяют разность площадей двух фигур через количество элементарных, и в зависимости от знака и величины этой разности элементарные фигуры помещают либо выше, либо ниже уровня прямой линии, параллельной линии опорной плоскости резервуара, и от полученной поверхности определяют уровень среды на снимке как разность расстояний от образованной поверхности до нижней на снимке точки резервуара, лежащей на опорной поверхности, после чего умножают полученный размер на соответствующий масштабный коэффициент увеличения и определяют уровень жидкости в резервуаре.
На фиг. 1 для примера изображен резервуар с жидкостью в изометрической проекции;
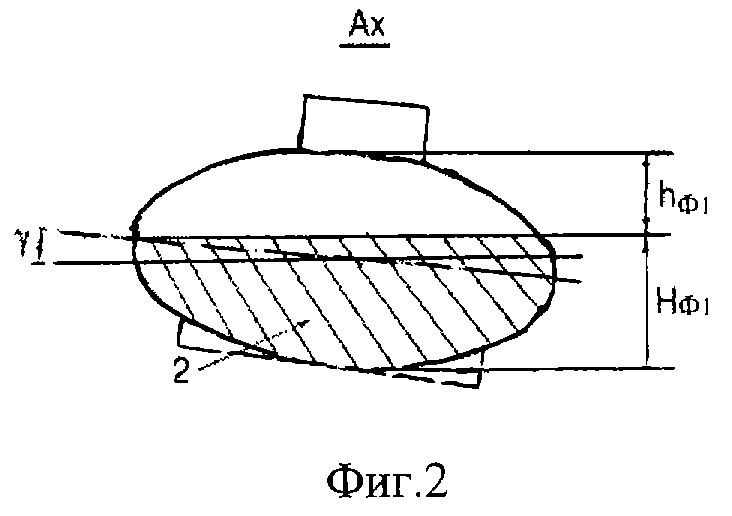
на фиг.2 дана схема снимка резервуара от первой геодезической точки, вид по стрелке Ах;
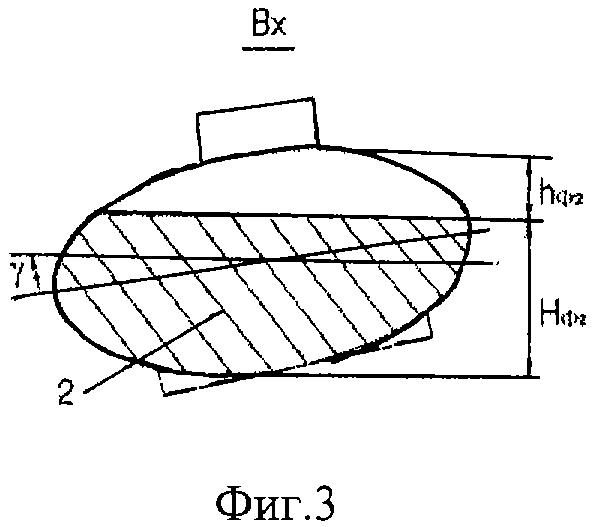
на фиг.3 дана схема снимка резервуара от второй геодезической точки, вид по стрелке Вх;
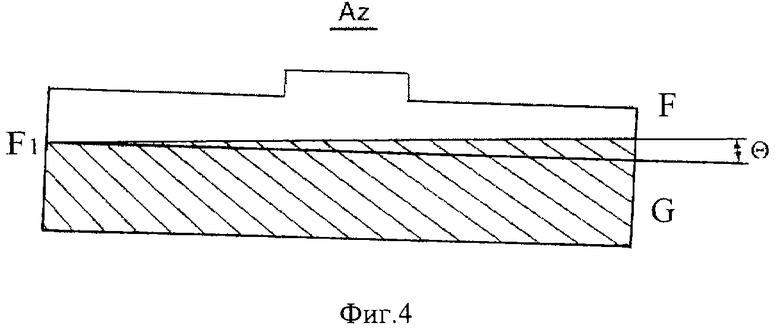
на фиг. 4 дана схема снимка резервуара от третьей геодезической точки, вид по стрелке Cz.
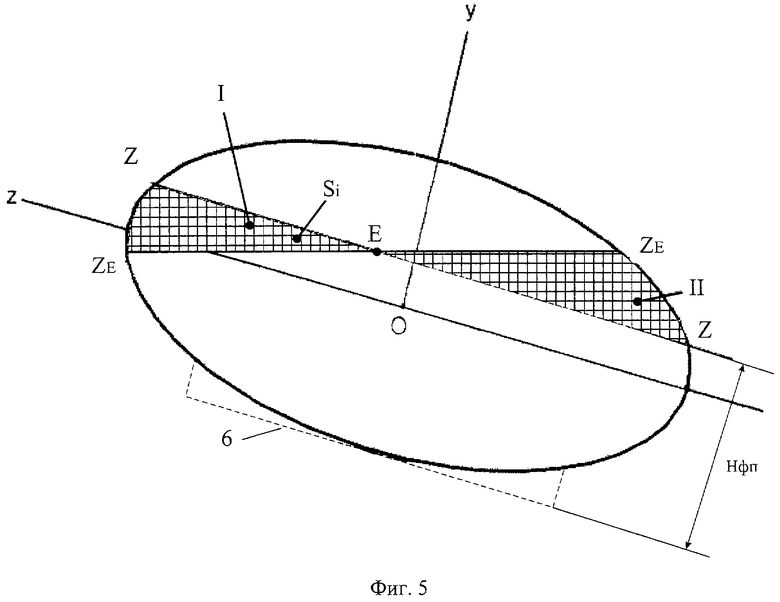
На фиг. 5 дана схема к расчету уровня жидкости относительно опорной поверхности резервуара.
На фиг.6 приведена инфракрасная фотография резервуара с нефтью.
Заявляемый способ осуществляется следующим образом.
Около контрольного объекта, в качестве которого выступает контрольный резервуар, разбивают геодезический базис, для чего определяют количество и местоположение точек, от которых будет производиться съемка. Выбор их осуществляют по виду контрольного объекта: если он цилиндрический и установлен вертикально, то достаточно одной точки съемки, если он установлен не вертикально, а тем более, если он имеет произвольную форму, состоит из нескольких баков, то назначают большее количество точек геодезического базиса. В качестве измерительных приборов применяют лазерную линейку и электронную фотокамеру, работающую в области инфракрасного диапазона электромагнитных волн и в силу этого обладающего свойством реагировать на тепловые поля не только поверхностей резервуара, но и сред, находящихся внутри них, таким образом осуществлять съемку внутренних частей резервуаров. Измерительные приборы устанавливают на площадке геодезической треноги. Площадка снабжена устройствами разворота по трем углам: азимута, дифферента и крена. Кроме того, на ней установлены два уровня для установки ее в плоскости горизонта. Лазерная линейка является устройством для измерения расстояния до резервуара. Измерительные приборы устанавливают на площадку треноги, площадку устанавливают в плоскости горизонта по уровням, оптические оси измерительных приборов выставляют параллельно между собой так, чтобы оптическая ось фотокамеры была на высоте 1,5-1,8 м над уровнем земли для удобства работы оператора. Наводят объектив фотокамеры на резервуар так, чтобы он полностью помещался в поле видоискателя, наводят камеру на резкость и фотографируют резервуар. В компьютер или на магнитный носитель записывают по показаниям лазерной линейки расстояние до резервуара X1, а по показаниям фотокамеры - фокусное расстояние f1. Вносят в компьютер информацию о снимке в формате графических файлов. После этого лазерную линейку и фотокамеру переносят и устанавливают во второй точке базиса и повторяют операции, описанные для первой точки, производят с помощью электронной фотокамеры инфракрасную съемку резервуара, заносят в компьютер расстояние до резервуара, фокусное расстояние и информацию о втором снимке. После этого повторяют эти же операции для 3-ей, 4-ой, . ..n-ой точек геодезического базиса. Вводят полученные снимки в компьютер в формате графических файлов, после чего производят фотограмметрическую обработку изображений резервуара, снятых с различных ракурсов. Определенное лазерной линейкой расстояние X1 от точки съемки до точки на поверхности резервуара делят на фокусное расстояние объектива фотокамеры f1 и определяют масштабный коэффициент увеличения электронной фотокамеры N1, для первого снимка по формуле:
N1=X1/f1. (1)
С учетом этого коэффициента определяют размеры резервуара по размерам на первом снимке. После этого на первом снимке определяют расстояние от нижней опорной поверхности резервуара до видимого через стенку резервуара образованной горизонтальной поверхности уровня среды Нср, и затем определяют уровень среды в резервуаре с использованием найденного масштабного коэффициента увеличения N1:
H1=N1Hф1 (2)
где Нф1, H1 - уровни среды на фотоснимке и в резервуаре.
Аналогичные операции производят на основе второго, третьего и других снимков. Для i-го снимка имеют:
Ni=Xi/fi; Hi=NiHфi, (3)
где Ni, Xi,...,Hi- соответствующие параметры для i-гo снимка.
Множество резервуаров занимают негоризонтальное положение, в частности, бензовозы и другие технические устройства. Для них уровень среды по вышеописанным операциям определяется неточно. В этом случае необходимо осуществить операцию горизонтирования опорной поверхности резервуара и, следовательно, всего резервуара. На снимке через среднюю точку линии уровня среды проводят прямую линию, параллельную линии опорной поверхности резервуара, после этого разбивают площади образованных этими прямыми двух фигур на элементарные фигуры, площади которых выбирают такими, чтобы они обеспечили заданную точность измерения, определяют разность площадей двух фигур через количество элементарных, и в зависимости от знака и величины этой разности элементарные фигуры помещают либо выше, либо ниже уровня прямой линии, параллельной линии опорной плоскости резервуара, и от полученной поверхности определяют уровень среды на снимке как разность расстояний от образованной поверхности до нижней точки резервуара по формулам (1), (2) и (3).
Ниже дается пример применения заявляемого способа к определению предложенным инфракрасным способом уровня жидкости в резервуаре средней сложности конструкции.
Номером 1 обозначен корпус резервуара; 2 - жидкость; 3 -, 4 -, 5 - измерительные приборы на геодезической подставке-треноге, последовательно располагаемые в трех точках геодезического базиса, 6 - опорная поверхность; oXYZ - геодезическая система координат; oxyz - система координат, связанная с корпусом 1 резервуара; θ, γ- углы дифферента корпуса 1 резервуара. При этом ось OY - вертикальна, оси ОХ и OZ лежат в плоскости горизонта, направление оси ОХ задается по сторонам света и по ориентации корпуса 1 в азимуте с помощью теодолита. Горизонтальность ее задается по уровням, устанавливаемым на геодезической подставке.
Измеряют на снимке свободное пространство hф1 (фиг.2) и, умножив его на N1, получают высоту h1 свободного пространства в резервуаре над уровнем среды для правой стороны резервуара:
h1=N1hф1. (4)
В данном случае N1= ХA/f1, где ХA - расстояние между точкой на правой стороне резервуара и измерительным прибором (фиг.1)
Аналогично определяют уровень среды H1 по измеренному уровню Нф1 на снимке фиг.2 для правой стороны резервуара:
H1=N1Hф1
Аналогичные измерения производят для других ракурсов: вид Bx фиг.1, фиг. 3:
N2=XB/f2 h2=N2hф2; H2=N2Hф2, (5)
где Хв - расстояние между точкой на левой стороне резервуара (фиг.1) и измерительным прибором,
f2 - фокусное расстояние, соответствующее ракурсу Вx.
Описанные выше операции относятся к резервуару, опорная поверхность 6 которого горизонтальна. В случае негоризонтальной установки резервуара и, следовательно, опорной поверхности 6 на основе снимков фиг.2 определяют угол γ крена резервуара, а по снимку фиг.4 определяют угол θ дифферента резервуара. Эти данные позволяют уточнить уровень среды в резервуаре для случая, когда он не имеет строго горизонтальной установки.
Угол γ определяют следующим образом.
На снимке по фиг.5 проводят оси OY и OZ, перпендикулярную и параллельную поверхности жидкости соответственно. По осям симметрии бака проводят оси Оу и Oz, при этом ось Oz параллельна опорной поверхности 6. После этого определяют угол γ из ΔZЕEZ.
Аналогично определяют угол Θ по фиг.4:
sinΘ = FG/F1F,
где F1F и FG - стороны треугольника F1FG, измеренные на фотоснимке по фиг.4.
Определяют величину Нфп уровня жидкости (среды), который бы имел место на снимке при горизонтальном резервуаре, по фиг.5. Для этого на снимке по фиг. 5 через среднюю точку Е уровня среды ZЕZЕ проводят прямую линию ZZ, параллельную опорной плоскости 6 резервуара (и оси ОХ). После этого разбивают площади SI и SII фигур I и II на одинаковые элементарные площадки Si столь малых размеров, чтобы была обеспечена заданная точность измерения площадей SI и SII. Подсчитываются количества nI и nII элементарных площадок, соответствующих площадям SI и SII. Если они различны, то половину разности nI-nII элементарных площадок переносят от площади с большим числом элементарных площадок к площади с меньшим количеством элементарных площадок, размещая их либо выше, либо ниже линии ZZ. После этого от полученной поверхности определяют уровень Нфп среды на снимке как разность расстояний от образованной поверхности до нижней точки снимка резервуара, лежащей на опорной поверхности. После этого, умножив полученный на снимке размер Нфп на соответствующий масштабный коэффициент увеличения, получают уровень среды относительно горизонтированной опорной плоскости.
Заявленный способ дистанционно-неконтактного определения уровня среды в резервуаре обладает рядом преимуществ перед известными способами:
- он относится к так называемым неразрушающим средствам контроля;
- он позволяет производить многократное с разных ракурсов определение уровня среды в резервуаре с получением компьютерного фотоснимка;
- он обеспечивает оперативность определения уровня среды в резервуаре и может быть применен в различных сферах - на бензоколонках, в нефтехранилищах и т.д.
На фиг. 6 представлена инфракрасная фотография резервуара с нефтью, заснятого с расстояния около 100 м. Нетрудно видеть уровень нефти в баке. Т. к. резервуар цилиндрический и установлен вертикально (опорная поверхность - горизонтальна), для определения уровня нефти в резервуаре достаточно одного снимка.
Использование: для мобильного дистанционно-неконтактного определения уровней жидкостей, находящихся внутри резервуаров произвольной формы, таких, как баки автоцистерн, самолетов и т.д. Сущность: разбивают геодезический базис вблизи контрольного объекта, устанавливают в конечных точках базиса измерительный прибор, производят взаимоориентацию измерительного прибора и задатчика световых марок, направляют лазерный луч на контрольный объект. В качестве измерительного прибора выступает электронная фотокамера инфракрасного диапазона электромагнитных волн со сменными светофильтрами. В качестве задатчика световых марок - лазерная линейка. Осуществляют съемку. Фиксируют в компьютере расстояние до световой марки на резервуаре и фокусное расстояние фотообъектива. Переносят измерительные приборы в другие точки. Осуществляют фотосъемку в i-ой точке базиса. Измеряют и фиксируют в компьютере расстояние от фотокамеры до световых марок на резервуаре и фокусное расстояние фотообъектива, после этого вводят полученные снимки в компьютер в формате графических файлов и производят их фотограмметрическую обработку. Определяют уровень среды в резервуаре как разность высот между низшей точкой его внутренней части и образованной горизонтальной поверхностью данной среды. Технический результат: обеспечение возможности высокоточного дистанционно-неконтактного определения уровня среды, заключенной в резервуаре. 1 з.п.ф-лы, 6 ил.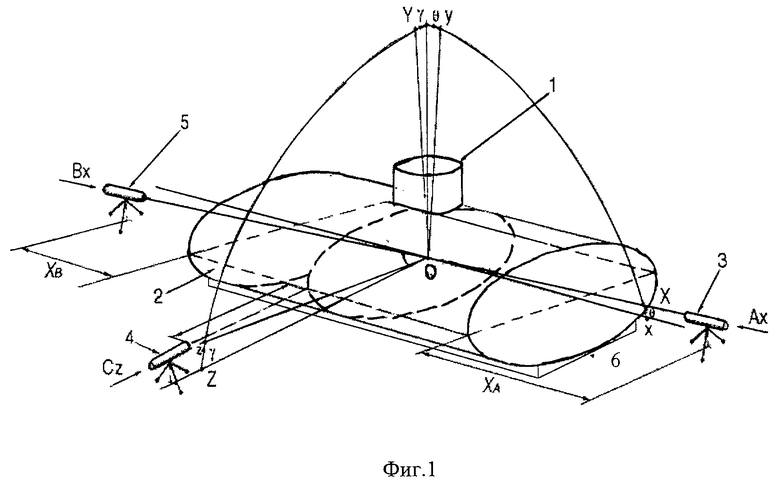
Ni=xi/fi, (i=1,2,...,n),
где хi - расстояние от фотокамеры до световой марки;
fi - фокусное расстояние объектива фотокамеры, после чего определяют уровень среды в резервуаре как разность высот между низшей точкой его внутренней части и образованной горизонтальной поверхностью данной среды.
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ СРЕД В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047844C1 |
| US 4489601 А, 25.12.1984 | |||
| Оптическая система для определения составов аэрозолей на основе люминесцентного анализа аэрозольных частиц | 2021 |
|
RU2763682C1 |
| SU 1833681 А3, 20.02.1996. | |||
