Предлагаемое изобретение относится к области геодезии, картографии, фотограмметрии, навигации и может быть использовано для построения топографических планов, трехмерных моделей местности и объектов, решения инженерно-геодезических задач, для построения обмерных чертежей фасадов зданий, выявления отклонений от вертикальности высотных сооружений, определения объема перемещенного грунта для карьеров, различных выработок и т.д. с погрешностью определения пространственных координат в диапазоне от 0.002 м до 0.015 м (2-15 мм) и реализуется на практике с применением программного комплекса, состоящего из 8-ми интегрированных между собой вычислительных программ.
Заявленное техническое решение обеспечивает возможность выполнения замеров, а именно - определение пространственных координат точек местности (сооружений) с точностью, соответствующей требованиям ГОСТов, инструкций, норм и правил, используемых в геодезии, картографии, инженерно-геодезических изысканиях, кадастре, например, ГОСТ Ρ 56905-2016 (Проведение обмерных и инженерно-геодезических работ на объектах культурного наследия. Общие требования). Кроме того, заявленное техническое решение обеспечивает единообразие процесса измерений в области определения пространственного и углового положения удаленного объекта (БПЛА) и пространственных координат точек местности (сооружений), определяемых с использованием значений пространственных координат и углового положения БПЛА, и координат изображений местности (сооружений), получаемых съемочной камерой, установленной на удаленном объекте (БПЛА). Заявленное техническое решение можно использовать как пример эталонного измерения пространственных координат точек местности (сооружений), пространственного и углового положения удаленного объекта (БПЛА), применяемого в заявленной области определения пространственных координат точек местности (сооружений).
Техническим результатом заявленного технического решения является установление значений линейных и угловых элементов внешнего ориентирования снимков, необходимых для определения пространственных координат точек местности (объекта) по измеренным координатам их изображений на снимках, полученных с использованием беспилотного летательного аппарата, оснащенного соответствующим оборудованием, программным обеспечением.
Заявителем выполнен анализ уровня техники в указанной области по российским и зарубежным базам патентных данных по тематике использования беспилотных летательных аппаратов (далее по тексту БПЛА) для определения координат объектов в режиме реального времени и в режиме последующей обработки (постобработки).
Анализ уровня техники, выполненный заявителем в целом в указанной области техники, позволяет сделать выводы о том, что проблема по определению геодезических координат точек высотных зданий и иных объектов является актуальной и не разрешена до настоящего времени в должной степени. То есть на дату подачи настоящей заявки существует насущная проблема по определению указанных координат с точностью, находящейся в диапазоне от 0.002 до 0.015 м (2-15 мм) в режиме реального времени и в режиме постобработки.
Указанные задачи не нашли разрешения до настоящего времени по причине отсутствия современных, надежных, компактных, доступных как по стоимостному(ым) критерию(ям), так и по аппаратному оснащению, высокоэффективных программных продуктов, на основе которых должно осуществляется достижение требуемых результатов. Кроме указанного, существует проблема отражения полученных результатов в режиме реального времени.
Далее заявителем представлена информация по наиболее эффективным методам и/или устройствам, которые предназначены для реализации указанных задач, особенно на территориях с опорными точками, привязанными к существующим геодезическим сетям.
Из уровня техники является известным, что БПЛА выполняет роль носителя полезной нагрузки (цифровой фотокамеры), посредством которой формируются изображения местности (объекта), использующиеся для вычисления координат точек местности (объекта) [1, 2] (Назаров А.С. Фотограмметрия. - Минск: ТерраСистемс, 2010. С 52-53; Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект. 2016. с. 75-76).
Таким образом, заявителем выявлено, что БПЛА применяются:
• для картографирования преимущественно небольших территорий [3] (Бабашкин Н.М., Кадничанский С.Α., Нехин С.С. Сравнение эффективности аэрофототопографической съемки с использованием беспилотных и пилотируемых авиационных систем. Геопрофи, №1, 2017. - с. 14-19);
• для решения некоторых инженерно-геодезических задач [4] (Безменов В.М., Гараев Н.Н, Мухутдинова Г.Р., Козырева А.В. Применение беспилотных летательных аппаратов для решения задач топографии и геодезии. Практический опыт. Сборник 5-ой международной научно-практической конференции Актуальные вопросы геодезии и геоинформационных систем. - Казань, 2016. - С. 115-121.).
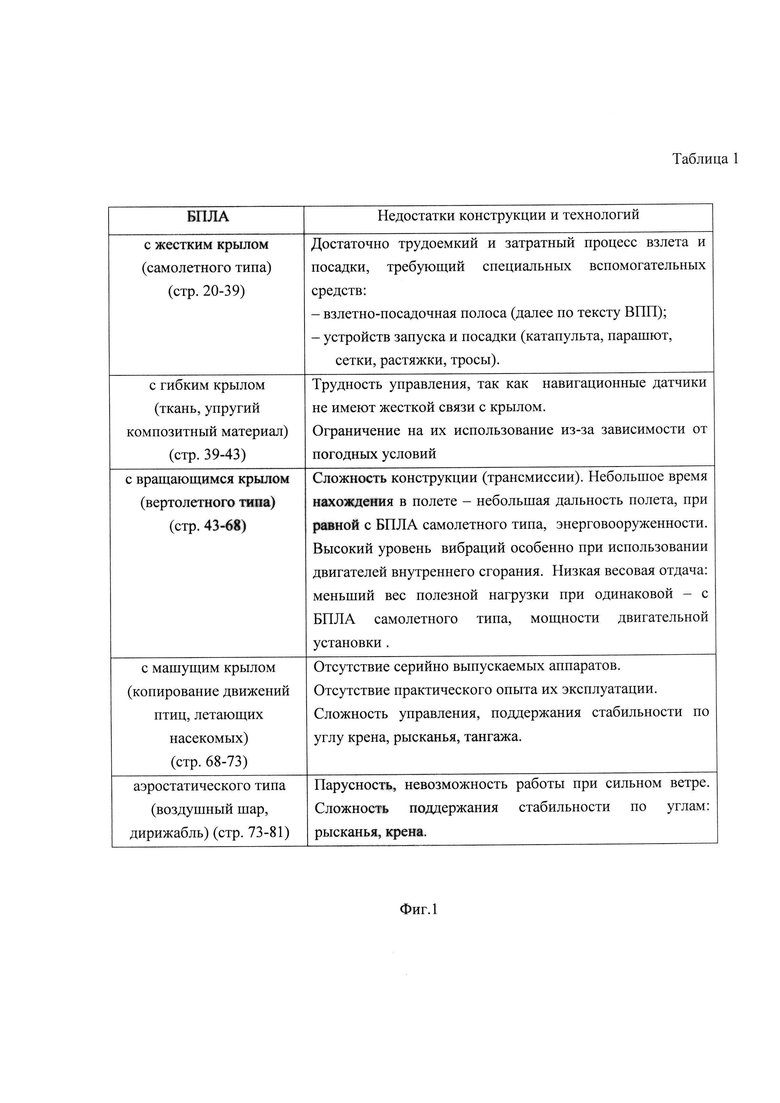
В соответствии с принятой в мире классификацией [5] (Фетисов В.C., Неугодникова Л.М., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. с. 17-18) БПЛА - летательный аппарат многоразового или условно-многоразового использования, не имеющий на борту экипажа и способный целенаправленно перемещаться в воздухе для выполнения различных функций в автономном режиме с помощью управляющей программы или посредством дистанционного управления, осуществляемого оператором с пульта управления. В данном источнике на с.91 указывается, что наиболее разрабатываемыми являются мини-БПЛА (международная классификация): взлетная масса 5-150 кг, дальность полета до 10 км, высота полета 150-300 м, продолжительность полета до 2 ч. Данные БПЛА не требуют взлетно-посадочной полосы (далее по тексту - ВПП).
На Фиг. 1 заявителем приведена Таблица 1, характеризующая представленные выше БПЛА. Анализ выполнен на основе информации, приведенной в источнике [5] (Фетисов B.C., Неугодникова Л.М., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. с. 13-81). Существуют также различные гибридные подклассы аппаратов, например, БПЛА, совмещающие свойства самолетного и вертолетного типов. Таким гибридом, в частности, является конвертоплан [5, 6] (Фетисов B.C., Неугодникова Л.М., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. с. 17-18; П. Бауэре Летательные аппараты нетрадиционных схем. - М.: Мир, 1991, стр. 55-56).
Основываясь на изложенном в Таблице 1, представляется возможным сделать следующие выводы:
1. БПЛА с гибким крылом, БПЛА с машущим крылом, БПЛА аэростатического типа присущи одни и те же недостатки: неустойчивость в полете, сложность поддержания стабильности по углам рысканья, крена и тангажа.
2. Для выполнения аэрофотосъемки (далее по тексту АФС) с целью определения координат точек местности (объектов) фотограмметрическим методом, наиболее приспособленными являются: БПЛА самолетного типа с жестким крылом и БПЛА с вращающимся крылом (вертолетного типа).
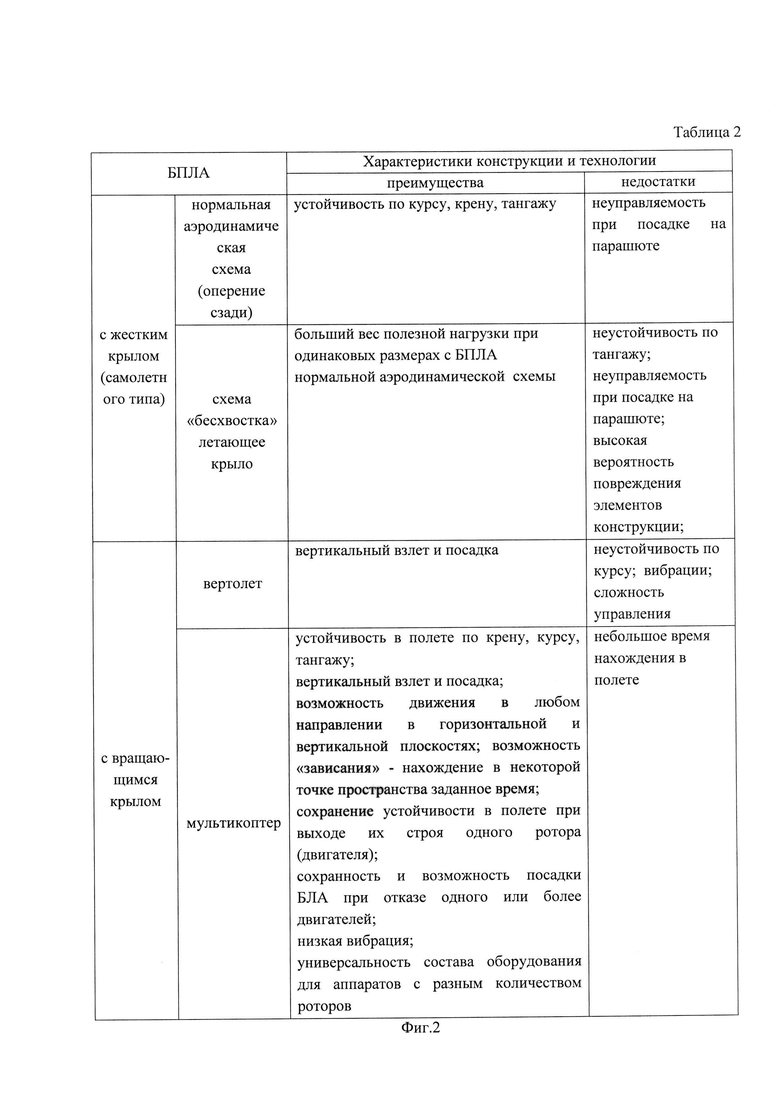
На Фиг. 2 заявителем представлена Таблица 2, в которой приведен сопоставительный анализ БПЛА самолетного типа, осуществляющих взлет и посадку без использования взлетно-посадочной полосы (ВПП) и характеристики БПЛА вертолетного типа.
Пояснение к Таблице 2: Мультикоптер - многовинтовой вертолет. Мультикоптер имеет более двух несущих винтов. Беспилотные мультикоптеры, как правило, относятся к классам мини-БПЛА и микро-БПЛА [5] (Фетисов B.C., Неугодникова Л.М., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. с. 61-62.).
Анализ выполнен на основе информации, приведенной в источнике [5] (Фетисов B.C., Неугодникова Л.М., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. с. 17-18.) и источнике [6] (П. Бауэре Летательные аппараты нетрадиционных схем. - М.: Мир, 1991, стр. 55-56).
Выводы по Таблице 2. Основываясь на изложенной в Таблице 2 информации, принимая внимание также информацию, изложенную в источнике [3] с. 14-19, где отмечена эффективность применения БПЛА для выполнения аэрофототопографической съемки (определения координат) на небольших территориях, возможно сделать следующий вывод о том, что для определения координат объектов на небольшой территории (картографирование), а также для определения координат сложных объектов, для решения инженерно-геодезических задач наиболее приемлемыми являются БПЛА-мультикоптеры.
Из исследованного уровня техники является общеизвестным, что при выполнении АФС местности (объекта) изображения формируются в определенном порядке, в результате чего получаются перекрывающиеся изображения местности (объекта). На основе измерения изображений: по координатам точек местности (объекта) на изображении, вычисляются пространственные координаты этих точек на местности (объекте) [1] (Назаров А.С. Фотограмметрия. - Минск: ТерраСистемс, 2010, с. 161-167.)
Возможность измерения на изображении большого количества точек позволяет строить цифровую модель местности (далее по тексту ЦММ), цифровую модель рельефа (далее по тексту ЦМР) или трехмерную модель объекта (далее по тексту 3D-модель).
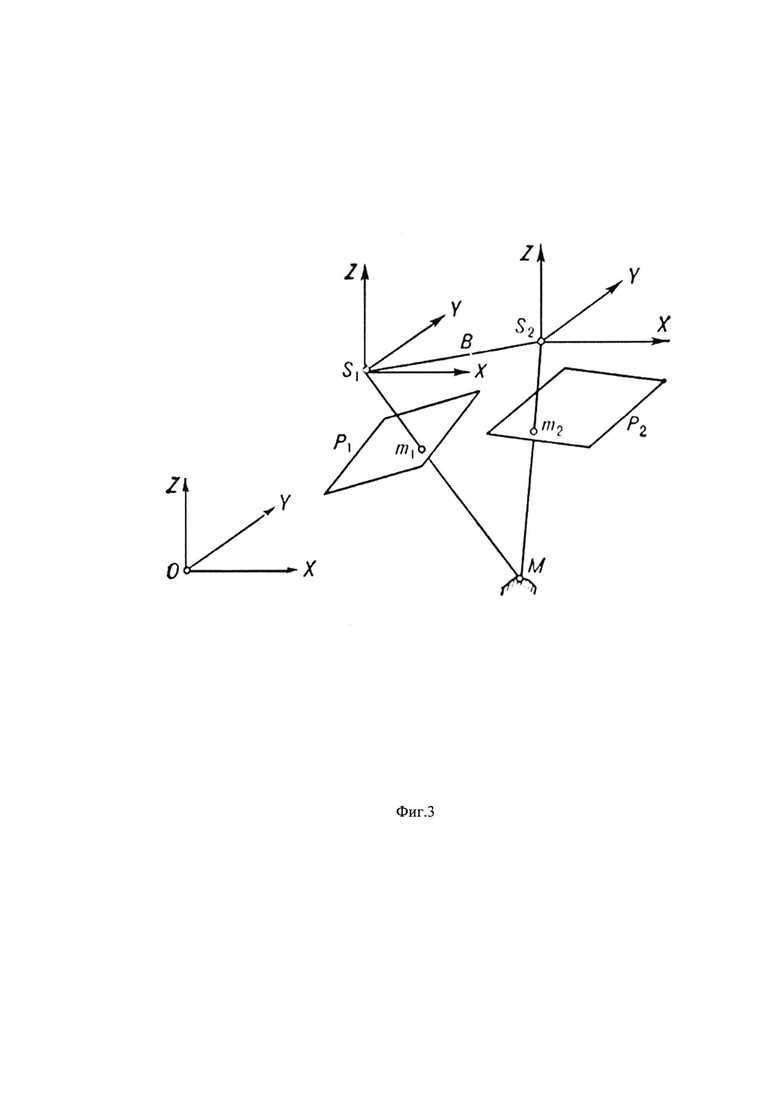
Также является общеизвестным, что вычисление пространственных координат точек местности (объекта) по координатам их изображений, осуществляется методом прямой пространственной фотограмметрической засечки (Фиг. 3). Для получения пространственных координат точек местности (объекта) методом прямой пространственной фотограмметрической засечки необходимо располагать значениями элементов внутреннего и внешнего ориентирования снимков (изображений) [1] (Назаров А.С. Фотограмметрия. - Минск: ТерраСистемс, 2010, с. 163-165).
Элементы внутреннего ориентирования - фокусное расстояние, координаты главной точки снимка, с необходимой точностью определяются в результате калибровки съемочной камеры [2] (Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект.2016. - с 122-123).
Элементы внешнего ориентирования (далее по тексту ЭВО) пространственные координаты центра проекции и три угла ориентирования снимка [2] (Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект.2016. - с 126-127).
Исходя из изложенных выше материалов, можно сделать вывод о том, что наиболее эффективным для использования в заявленных целях являются БПЛА-мультикоптер. Однако, несмотря на то, что БПЛА-мультикоптер являются эффективным средством для выполнения АФС, тем не менее, система навигации, установленная на БПЛА, не позволяет определять элементы внешнего ориентирования (ЭВО) с требуемой точностью для определения пространственных координат на местности (объекте) с погрешностью 0.002-0.015 м (2-15 мм) в режиме реального времени, в силу чего устройства с описанным выше оснащением не пригодны для реализации целей, поставленных в заявленном техническом решении.
Заявителем выявлены способы определения ЭВО, которые приведены далее.
Известен способ [2] (Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект.2016. с. 126-127) определения ЭВО с помощью специального навигационного оборудования, установленного на борту летательного аппарата. Таким оборудованием является:
• спутниковые одночастотные или двухчастотные ГЛОНАСС/GPS приемники;
• гироскопы инерциального, лазерного типа;
• акселерометры и т.д.
Этот способ позволяет определять пространственное и угловое положение летательного аппарата (снимков) непосредственно в полете (в моменты фотографирования) или после полета.
В известном способе определение координат летательного аппарата в моменты фотографирования определяется с помощью спутникового оборудования ГЛОНАСС/GPS.
Определение углов ориентации летательного аппарата (снимка) в моменты фотографирования обеспечивается посредством либо многоантенных спутниковых ГЛОНАСС/GPS-приемников, либо инерциальных измерительных устройств (датчиков) IMU (InertialMeasurementUnit).
При этом следует отметить, что существуют навигационные комплексы GPS/IMU, объединяющие GPS и инерциальное измерительное устройство IMU [7] (Медведев Е.М. Интегральные навигационные комплексы GPS/IMU. Геопрофи, №3, 2005. - с. 39-40).
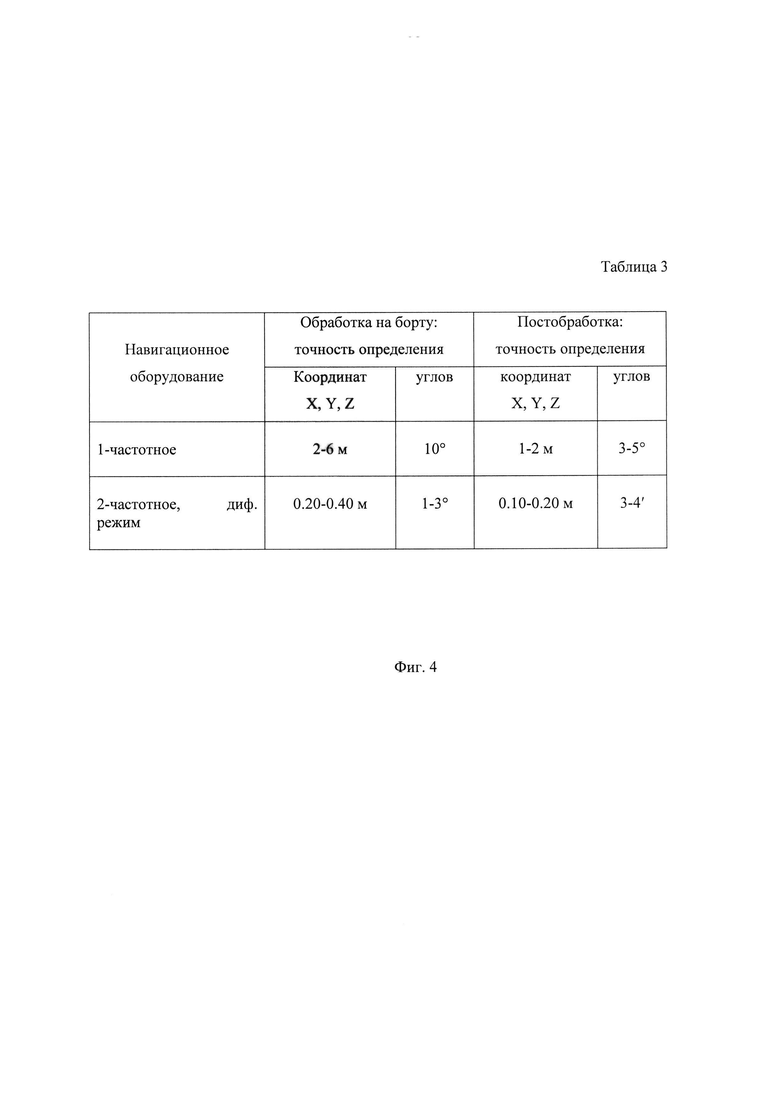
На Фиг. 4 заявителем приведена Таблица 3, в которой представлены значения ошибок определения координат и углов для разных режимов обработки получаемых навигационных данных.
Пояснение к Таблице 3. Определение углового положения БПЛА (угол крена, рысканья, тангажа) с точностью 10° при использовании одночастотного оборудования достигается при вычислении углов через вектор скорости [8] (Костюк А.С. Навигационное обеспечение аэрофотосъемки с беспилотных летательных аппаратов. Автоматизированные технологии изысканий и проектирования, №3 (50), 2013, - с. 52-55).
При использовании на борту БПЛА двухчастотных ГЛОНАСС/GPS-приемников в дифференциальном режиме, в районе местности (объекта) аэрофотосъемки, дополнительно устанавливаются спутниковые геодезические базовые ГЛОНАСС/GPS-станции (Фиг. 5). Точность определения пространственного положения БПЛА 0.10-0,20 м и точность определения углов 3-4' может быть достигнута в результате постобработки дифференциальных GPS и инерциальных данных [2] (Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект. 2016. с. 126-127).
Выводы по Таблице 3. Характерной особенностью данного способа является следующее:
• послеполетная обработка (постобработка) дифференциальных GPS и инерциальных данных позволяет определить пространственное и угловое положение летательного аппарата (снимка) на моменты съемки с более высокой точностью, чем обработка данных непосредственно на борту БПЛА. Данный вывод подтверждается в источнике [7] (Медведев Е.М. Интегральные навигационные комплексы GPS/IMU. Геопрофи, №3, 2005. - с. 39-40).
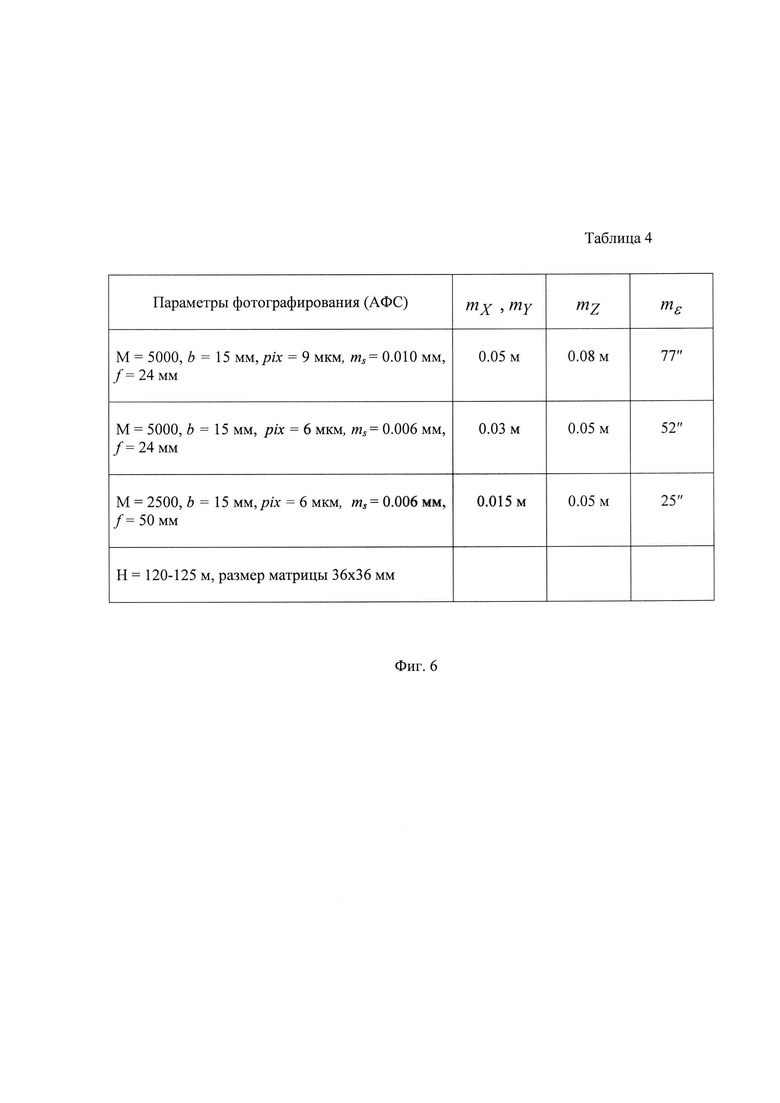
На Фиг. 6 заявителем представлена Таблица 4, в которой приведены значения ошибок определения пространственного и углового положения БПЛА-мультикоптер для высоты полета 125-150 метров. Необходимо отметить, что высота полета БПЛА-мультикоптер при выполнении аэрофотосъемки в большинстве случаев составляет 120-500 метров.
Пояснение к Таблице 4. Расчеты выполнены с использованием формул

приведенных в источнике [8] (Костюк А.С. Навигационное обеспечение аэрофотосъемки с беспилотных летательных аппаратов. Автоматизированные технологии изысканий и проектирования, №3 (50), 2013. - с. 53), В формуле использованы обозначения:
mx, my, mz - точность пространственных координат;
mε - точность углового положения для высоты полета 125-150 м;
M - знаменатель масштаба аэрофотосъемки;
b - базис съемки в масштабе снимка;
pix - размер пикселя матрицы;
f - фокусное расстояние съемочной камеры;
ms - точность измерения изображения;
ρ - количество секунд в 1 радиане, равное 206 265 сек.
В Таблице 4 высота полета обозначена Н.
Выводы по Таблице 4. Точность определения координат центров фотографирования и углов наклона снимков, необходимая для фотограмметрической обработки изображений, может быть достигнута только в режиме постобработки при условии использования спутниковых приемников геодезического класса, постоянно действующих базовых геодезических спутниковых станций, что отмечается в источнике [8] (Костюк А.С. Навигационное обеспечение аэрофотосъемки с беспилотных летательных аппаратов. Автоматизированные технологии изысканий и проектирования, №3 (50), 2013. - с. 53).
При этом существуют GPS/IMU - комплексы авиационного-базирования. Использование GPS/IMU - комплексов авиационного-базирования позволяет определять координаты летательного аппарата (снимка) с точностью 0.05-0.30 м, углы с точностью 18'' (0.005°). Данная точность может быть достигнута только в результате постобработки дифференциальных GPS и инерциальных данных [7] (Медведев Е.М. Интегральные навигационные комплексы GPS/IMU. Геопрофи, №3, 2005. - с. 39-40.), [1] (Назаров А.С. Фотограмметрия. - Минск: ТерраСистемс, 2010.. - с. 33-35.). Такая система не может быть размещена на мини БПЛА по причине ее большого веса.
Недостатками данного способа являются:
• жесткие требования к массе, размерам и точности оборудования GPS/ГЛОНАСС, IMU;
• недостаточная точность определения координат и углов БПЛА в режиме реального времени (координат не точнее 0.05 м (т.е. 50 мм), углов не точнее 1°;
• использование спутниковой навигационной системы не всегда возможно из-за особых условий, например, вследствие переотражения и/или подавления сигнала;
• необходимость размещения дифференциальных базовых GPS/ГЛОНАСС станций в районе выполнения АФС;
• высокая стоимость оборудования;
- высокая точность определения пространственных координат и углового положения требует большого количества времени и ресурсов.
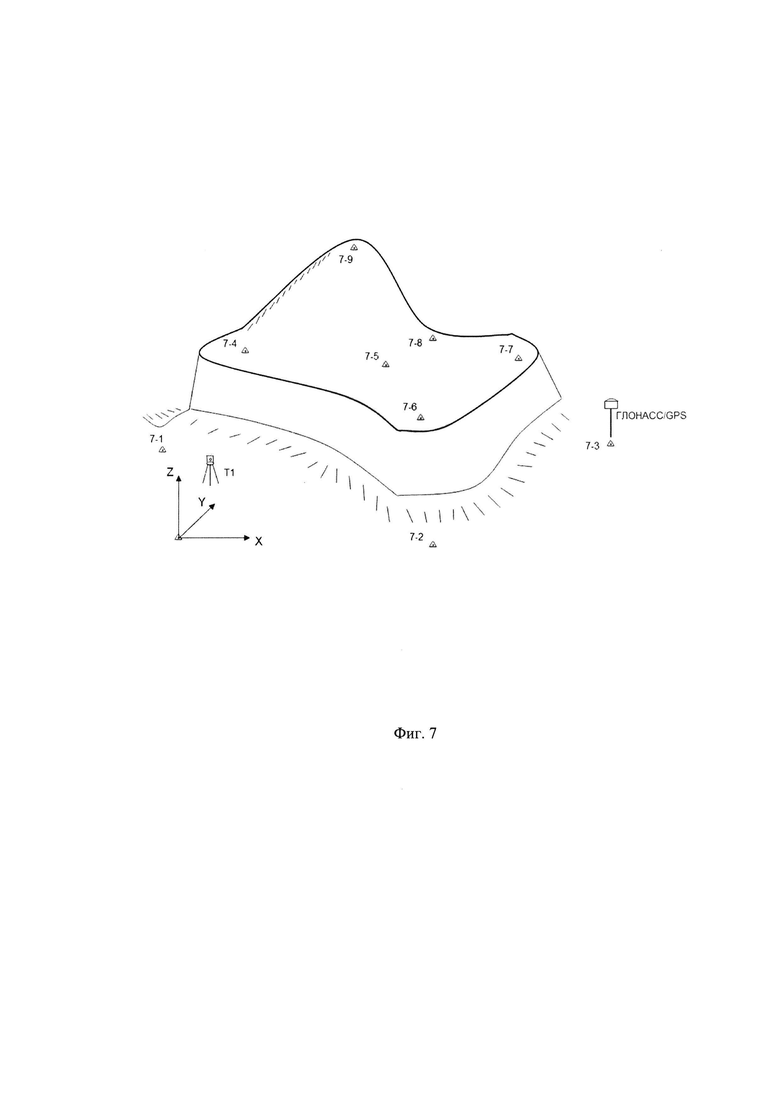
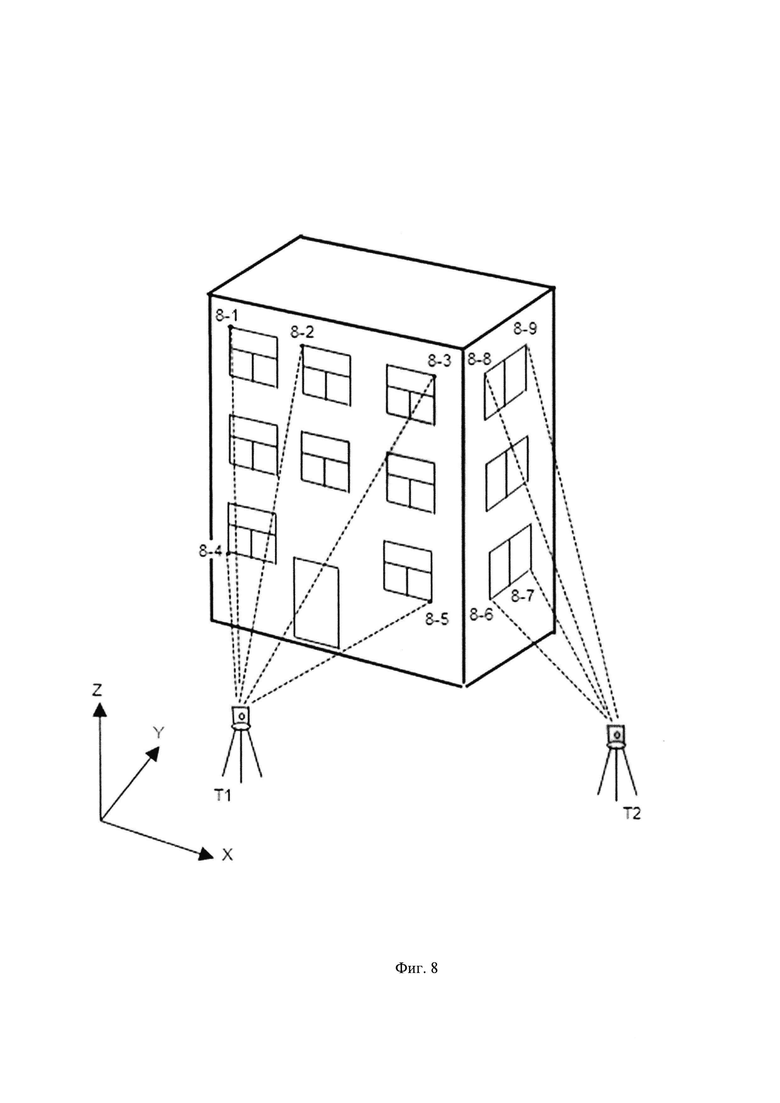
Известен способ обратной фотограмметрической засечки (ОФЗ), в котором определение ЭВО осуществляется на основе значений координат изображений и пространственных координат опорных точек, размещенных на местности (объекте). Этот способ применяется на практике и освещен, в частности, в источнике [9] (Обиралов А.И., Лимонов А.Н., Гаврилова Л.А. Фотограмметрия. - М.: КолосС. 2002. с. 104-105). Координаты изображений опорных точек получаются в результате измерения изображения (снимка). Пространственные координаты опорных точек определяются посредством геодезических измерений при помощи геодезического оборудования: ГЛОНАСС/GPS-приемников, электронных тахеометров (Фиг. 7, Фиг. 8). Точность определения элементов внешнего ориентирования: координаты БПЛА (снимка) - не лучше 0.05 м; (т.е. 50 мм), углов не точнее 30-60'',т.е. в диапазоне 30-60 секунд.
Точность определения элементов внешнего ориентирования зависит от следующих факторов:
• точности пространственных координат опорных точек;
• точности измерения координат изображений;
• расположения опорных точек на местности (объекте);
• количества опорных точек.
Основными недостатком данного способа являются:
• точное пространственное и угловое положение БПЛА (снимков) вычисляется только после выполнения аэрофотосъемки;
• ограниченная точность определения элементов внешнего ориентирования (ЭВО);
- необходимость дополнительных измерений на местности (объекте) до или после АФС.
Известен способ определения ЭВО, в котором используется специальное навигационное оборудование, установленное на БПЛА и опорные точки, размещенные на местности (объекте). Специальное навигационное оборудование позволяет получать приближенные (предварительные) значения ЭВО. Точные значения ЭВО определяются в результате решения обратной фотограмметрической засечки, в которой используются:
• предварительные значения ЭВО, получаемые специальным навигационным оборудованием;
• координаты изображений и пространственные координаты опорных точек.
Точность определения элементов внешнего ориентирования данным способом фактически сопоставима с точностью способа ОФЗ: точность определения пространственных координаты БПЛА (снимка) - не лучше 0.05 м; (т.е. 50 мм), углов не точнее 30-60'' (т.е. в диапазоне 30-60 секунд) [9] (Обиралов А.И., Лимонов А.Н., Гаврилова Л.А. Фотограмметрия. - М.: КолосС. 2002. с. 104-105).
Основными недостатком данного способа являются:
• точное пространственное и угловое положение БПЛА (снимков) вычисляется после выполнения аэрофотосъемки;
• ограниченная точность определения элементов внешнего ориентирования (ЭВО);
• необходимость дополнительных измерений на местности (объекте) до или после АФС.
Наиболее близким по существу и совпадающим признакам с заявленным техническим решением, выбранным заявителем в качестве прототипа, является способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов по патенту РФ №2567865 от 01.07.2014 [10].
Сущностью известного технического решения является способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов, заключающийся в том, что имеется, как минимум, три дальномерных узла, один из которых - дальномерный узел наводчика, пространственно расположенных на некотором удалении друг от друга и от объекта, но в пределах прямой видимости объекта, и координаты дальномерных узлов определены в одной из выбранных систем координат, при этом дальномерные узлы наводят свои дальномерно-угломерные приборы на объект и определяют расстояния до удаленного объекта, после этого координаты объекта определяют пересечением сфер с центрами в трех либо более дальномерных узлах, характеризующийся тем, что сначала дальномерный узел наводчика наводит свой дальномерно-угломерный прибор на объект и определяет расстояние и угловые координаты объекта, затем по этим измерениям вычисляют первое приближение координат объекта, которые далее передают на остальные дальномерные узлы, которые по этим координатам прицеливают свои дальномерно-угломерные приборы и замеряют расстояния до объекта, затем по измеренным расстояниям вычисляют второе приближение координат объекта, используя для этого расстояние от дальномерного узла наводчика и множество сочетаний расстояний от дальномерных узлов до объекта, взятых попарно, далее вычисленные координаты объекта передают на остальные дальномерные узлы, которые по этим координатам заново прицеливают свои дальномерно-угломерные приборы и определяют расстояния до объекта, затем по измеренным расстояниям вычисляют третье приближение координат объекта и так далее, пока разница в определении координат объекта в двух соседних по порядку выполнения приближениях координат объекта не станет менее порогового значения.
Недостатком прототипа является:
• невозможность определения положения удаленного объекта с высокой точностью, поскольку измерение вертикальных и горизонтальных углов, получаемых с помощью углоизмерительных устройств, и измерение дальности выполняется до произвольной точки поверхности удаленного объекта (БПЛА), вследствие чего точность определения координат не может быть лучше 0.5 м, (т.е. 500 мм);
• невозможность определения углового положения (так называемые углы крена, рысканья и тангажа) удаленного объекта (БПЛА), поскольку измерение дальности выполняется до одной произвольной точки поверхности удаленного объекта (БПЛА);
• вычисление приближенных координат объекта по результатам измерения дальномерно-угломерным прибором узла наводчика расстояния и угловых координат объекта (вертикального и горизонтального углов);
• определение положения (пространственных координат) объекта выполняется измерением расстояний до объекта повторяющимися наведениями дальномерно-угломерных приборов до тех пор, пока разница в определении координат объекта в двух соседних по порядку выполнения приближениях координат объекта не станет менее порогового значения, которое определяется габаритами объекта и находится в диапазоне от 0.5 м и более, что значительно (больше, чем на порядок) уступает достигнутым в заявленном техническом решении результатам;
• высокая технологическая сложность реализации процесса наведения (наблюдения) на удаленный объект в известном техническом решении;
• высокая трудоемкость реализации процесса наведения (наблюдения) на удаленный объект и определения его координат по причине необходимости использования подготовленного наводчика в известном техническом решении;
• отсутствие автоматизации передачи полученной информации (координат, которые могут быть использованы оборудованием фотокамера и т.п.), установленном на удаленном объекте, например, заказчика;
• отсутствие возможности достижения точности определения пространственных координат точек, получаемой посредством наземных измерений с применением традиционного геодезического оборудования, без существенных финансовых и временных издержек.
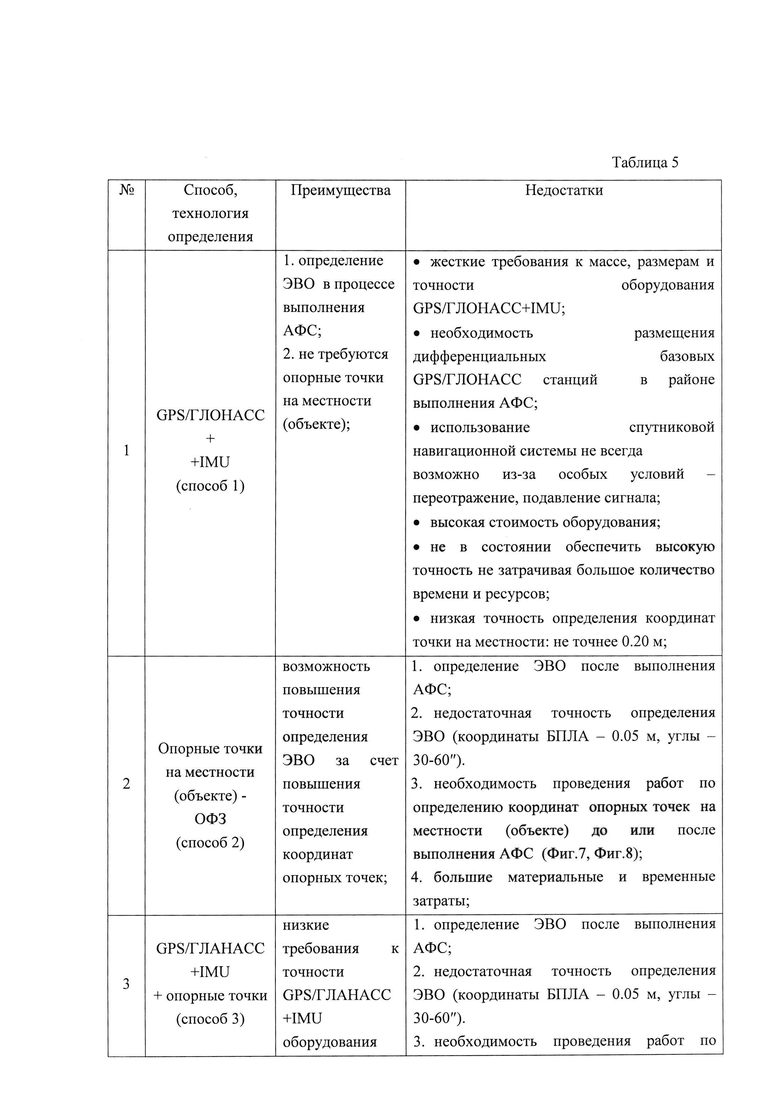
На основании изложенных выше данных заявителем в Таблице 5 (см. Фиг.9) представлена обобщающая информация об имеющихся преимуществах и недостатках технических решений, выявленных в результате анализа исследованного уровня техники на дату подачи заявки в целом. Анализ Таблицы 5 позволяет сделать следующие выводы:
1. Определение пространственных координат и углового положения БПЛА (снимка) с точностью лучше 0.05 м и 30''-60'' в реальном режиме времени, а также в режиме постобработки не может быть достигнуто способами, выявленными из исследованного выше уровня техники.
2. Спутниковая навигационная система и инерциальное навигационное оборудование не в состоянии обеспечить высокую точность определения пространственного и углового положения БПЛА, не затрачивая большого количества времени и ресурсов.
3. Использование спутниковой навигационной системы ГЛОНАСС/GPS не всегда возможно из-за особых условий - переотражение, подавление сигнала и др. [11] (Соловьев Ю.А. Системы спутниковой навигации. - М.: Экотрендз. 2000. - с. 142-150).
4. Создание сети опорных точек на объекте (здании, сооружении) не в состоянии обеспечить требуемую точность, не затрачивая большого количество времени и ресурсов и не всегда возможно из-за особых условий, а именно - из-за расположения рядом с объектом мешающих препятствий (забор, деревья, здание и т.д.) [12] (Безменов В.М., Сафин К.И., Гараев Н.Н. Возможность построения измерительного комплекса на основе беспилотного летательного аппарата. Сборник 6-ой междунар. науч.-практической конф. Актуальные вопросы геодезии и геоинформационных систем. - Казань, 2017. - с. 182-183).
При этом заявленное техническое решение направлено на реализацию следующих технических результатов:
• обеспечение возможности определения положения удаленного объекта (БПЛА) с точностью в диапазоне 0.002-0.005 м (2-5 мм) в отличие от прототипа;
• возможность определения углового положения (так называемые углы крена, рысканья и тангажа) удаленного объекта (БПЛА), с точностью 1' (60'' угловых секунд) и лучше, в реальном режиме времени, в отличие от прототипа;
• обеспечение вычисления приближенных координат объекта не по углам и расстояниям дальномерного узла-наводчика, а по результатам спутниковых-геодезических измерений в отличие от прототипа;
• обеспечение определения положения (пространственных координат) объекта (БПЛА) посредством проведения минимального количества измерений без сравнения получаемого положения объекта, определяемого в двух соседних по порядку дальномерных станциях до тех пор, пока разница координат объекта в двух соседних по порядку станциях не станет менее порогового значения, в отличие от прототипа;
• обеспечение высокой технологической реализации процесса наведения (наблюдения) на удаленный объект, в отличие от прототипа;
• обеспечение снижения трудоемкости реализации процесса наведения на удаленный объект и определения его координат, в отличие от прототипа;
• обеспечение возможности автоматизации приема/передачи полученной информации (координат) в режиме реального времени для установленного на БПЛА оборудования, в отличие от прототипа.
Сущностью заявленного технического решения является способ определения пространственных координат и углового положения удаленного объекта с помощью дальномерных станций, заключающийся в применении не менее трех дальномерных станций, пространственно расположенных на некотором удалении друг от друга и от удаленного объекта, в пределах прямой видимости удаленного объекта, при этом координаты дальномерных станций определяют в пространственной системе координат, при этом дальномерные станции наводят свои дальномеры на удаленный объект и определяют расстояния до удаленного объекта, после этого координаты удаленного объекта определяют пересечением сфер с центрами в трех или более дальномерных станциях, вычисляют примерные координаты положения удаленного объекта, отличающийся тем, что выполняют ориентацию дальномерных станций следующим образом: дальномерную станцию 1 ориентируют на дальномерную станцию 2, дальномерную станцию 2 ориентируют на дальномерную станцию 3, дальномерную станцию 3 ориентируют на дальномерную станцию 1, с возможностью увеличения количества дальномерных станций до 4-х и более, выполняют измерения расстояний между дальномерными станциями, вычисляют и задают пространственную систему координат, при этом координаты каждой последующей, 4-ой и более, дальномерной станции определяют в пространственной системе координат, заданной дальномерными станциями 1, 2, 3 посредством измерения расстояний от каждой последующей, 4-ой и более, дальномерной станции до дальномерных станций 1, 2, 3, определяют в общеземной системе координат посредством ГЛОНАСС/GPS оборудования координаты дальномерных станций и удаленного объекта, который представляет собой беспилотный летательный аппарат, определяют параметры перехода из общеземной системы координат в пространственную систему координат, определяют примерные, с точностью до 2 м, координаты беспилотного летательного аппарата в пространственной системе координат, задаваемой дальномерными станциями с использованием параметров перехода из общеземной системы координат в пространственную систему координат, вычисляют горизонтальный и вертикальный углы наведения для каждой из дальномерных станций, наводят в автоматическом режиме дальномерные станции на беспилотный летательный аппарат, измеряют расстояние от дальномерной станции до отражателей, закрепленных на беспилотном летательном аппарате, далее на базе измеренных расстояний до каждого отдельного отражателя определяют координаты каждого отражателя с использованием способа пересечения сфер из трех или более дальномерных станций, определяют точные координаты беспилотного летательного аппарата в пространственной системе координат, как среднее значение между координатами всех отражателей, вычисляют угловое положение беспилотного летательного аппарата, т.е. определяют угловое положение беспилотного летательного аппарата на основе вычисленных координат отражателей, далее вычисляют пространственные координаты точек на местности по измеренным координатам их изображений, полученных фотокамерой, установленной на беспилотном летательном аппарате, с использованием координат беспилотного летательного аппарата и углового положения беспилотного летательного аппарата в пространственной системе координат.
При этом заявленное техническое решение характеризуется тем, что реализуется посредством использования программного комплекса, состоящего из 8-ми интегрированных между собой вычислительных программ, являющимися необходимыми для реализации заявленного технического решения.
Заявленное техническое решение иллюстрируется Фиг. 1 - Фиг. 14:
На Фиг. 1 - изображена Таблица 1, в которой размещена информация о БПЛА, характеризующая БПЛА по принципу полета и особенности(ям) их использования.
На Фиг. 2 - изображена Таблица 2, в которой размещена информация о характеристиках БПЛА самолетного типа, осуществляющих взлет и посадку без использования взлетно-посадочной полосы (ВПП) и о характеристиках БПЛА вертолетного типа.
На Фиг. 3 - изображен общий вид положения пары (2-х) снимков (изображений) при определении пространственных координат точек на местности (объекте) методом пространственной фотограмметрической засечки. На Фиг. 3 приведены буквенные обозначения: M - точка на местности (объекте), P1 - первый снимок пары снимков (стереопары), Р2 - второй снимок пары снимков (стереопары), m1 - изображение точки M на снимке P1, m2 - изображение точки M на снимке Р2, S1 - центр проекции снимка P1, S2 - центр проекции снимка Р2, В - базис фотографирования (расстояние между S1 и S2), OXYZ - система координат местности (объекта), S1XYZ - система координат снимка P1, S2XYZ - система координат снимка Р2.
На Фиг. 4 - изображена Таблица 3, в которой размещена информация о значениях ошибок определения координат и углов БПЛА для реального режима времени и режима постобработки, получаемых с помощью навигационных систем ГЛОНАСС/GPS.
На Фиг. 5 - изображен общий вид расположения дифференциальных спутниковых базовых геодезических станций (ГЛОНАСС/GPS) на местности.
На Фиг. 6 - изображена Таблица 4, на которой размещена информация о значениях ошибок определения пространственного и углового положения БПЛА (снимка) для высоты полета 125-150 м.
На Фиг. 7 - изображен общий вид положения опорных точек на местности (объекте) при построении топографических планов и решении инженерно-геодезических задач. Цифрами от 7-1 до 7-9 обозначены опорные точки на местности, Т1 - электронный тахеометр (теодолит), XYZ - система координат для местности (объекта).
На Фиг. 8 - изображен общий вид положения опорных точек на объекте (здании, сооружении) при решении прикладных инженерно-геодезических задач. Цифрами от 8-1 до 8-9 обозначены опорные точки на объекте, Τ1, Т2 - электронный тахеометр (теодолит) - показан в разных точках местности, XYZ - система координат для местности (объекта).
На Фиг. 9 - изображена Таблица 5, в которой размещена информация (преимущества, недостатки) о способах определения пространственного и углового положения БПЛА.
На Фиг. 10 - изображены углы ориентирования БПЛА (угловое положение). Цифрами 10-1, 10-2, 10-3, 10-4 обозначены отражатели, установленные на БПЛА, OXYZ - система координат для местности (объекта), SXYZ - система координат БПЛА, оси этой системы координат параллельны осям системы координат OXYZ, α, ω, χ - углы ориентирования БПЛА.
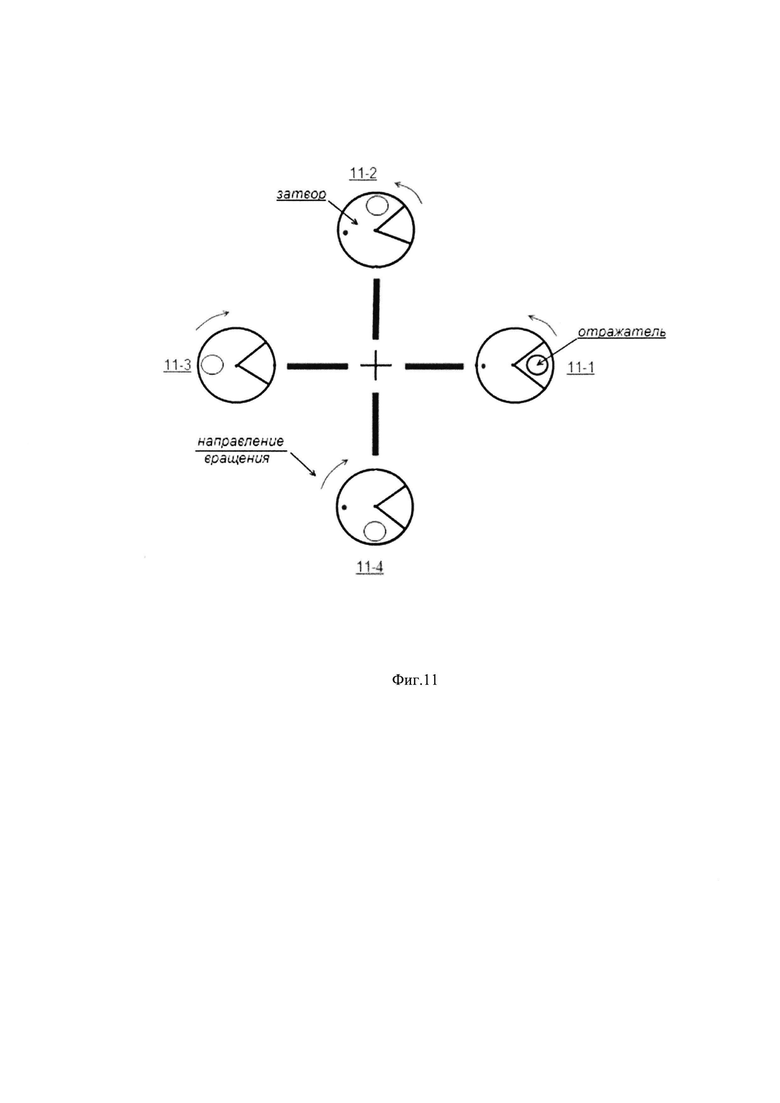
На Фиг. 11 - изображен принцип поочередного открытия/закрытия отражателей, размещенных на БПЛА). Цифрами 11-1, 11-2, 11-3, 11-4 обозначены отражатели, установленные на БПЛА.
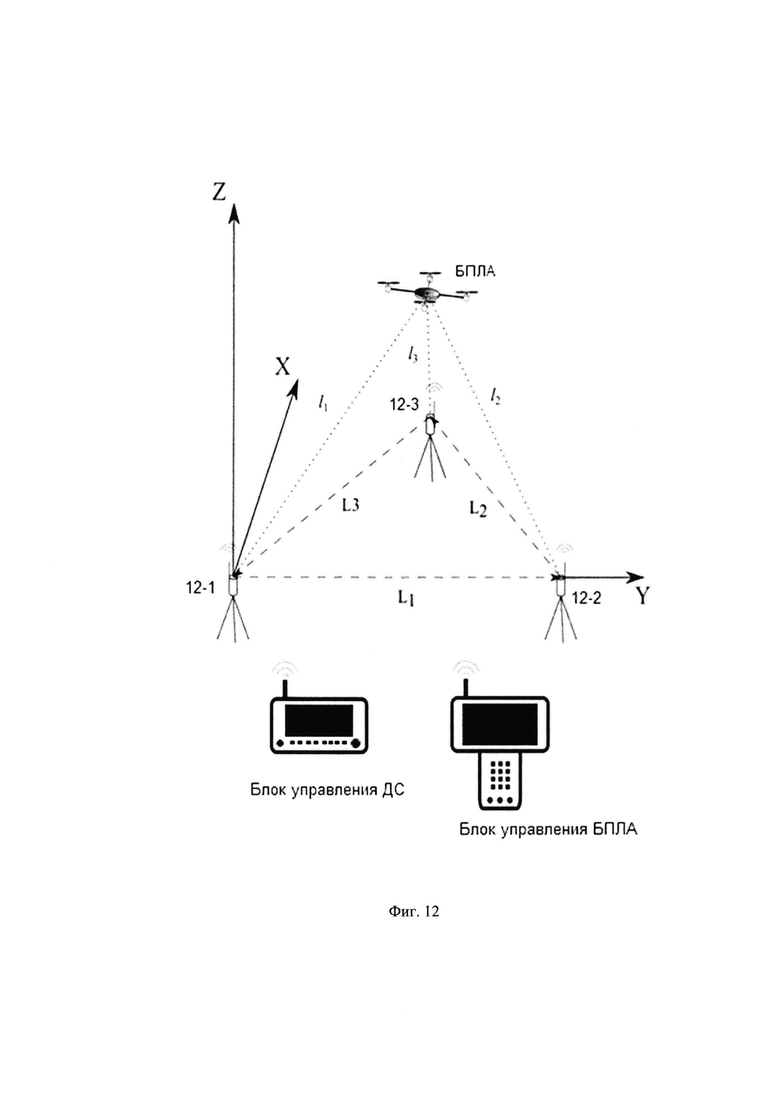
На Фиг. 12 - изображен общий вид измерительной системы в целом. Цифрами 12-1, 12-2, 12-3 дальномерные станции, установленные на штативы, L1, L2, L3 - расстояния между дальномерными станциями, l1, l2, l3 - расстояния от дальномерных станций до БПЛА, XYZ -точная система координат, заданная дальномерными станциями.
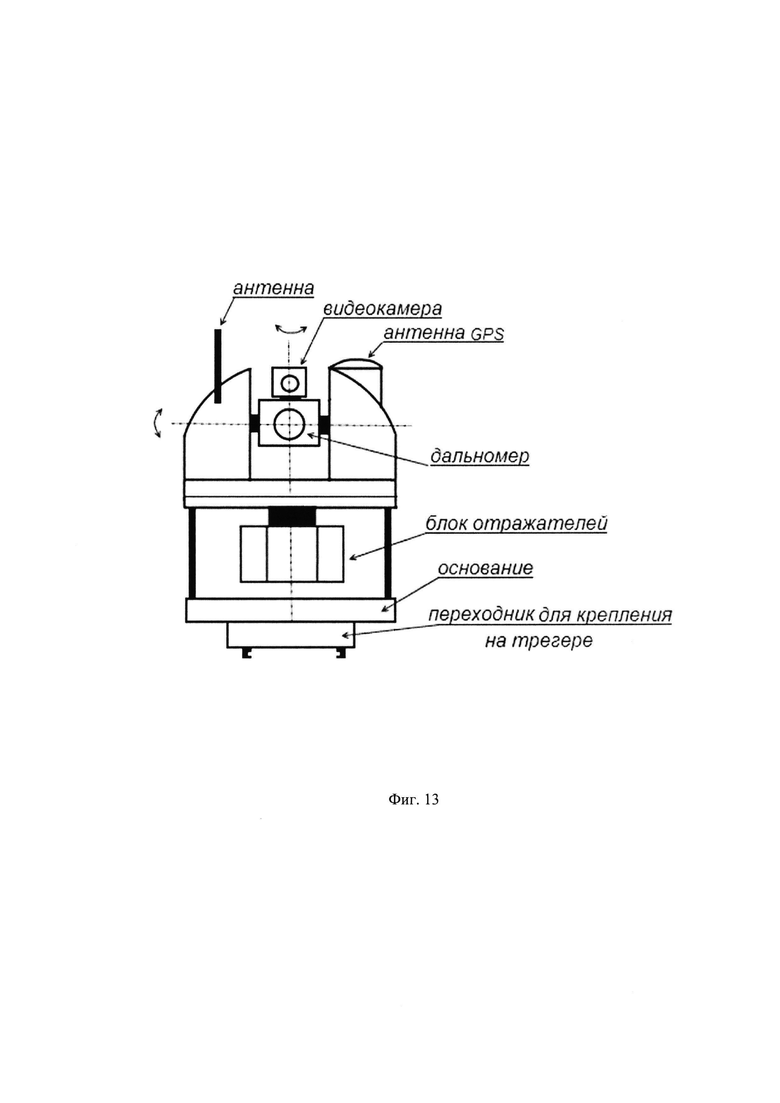
На Фиг. 13 - изображен принцип устройства дальномерной станции.
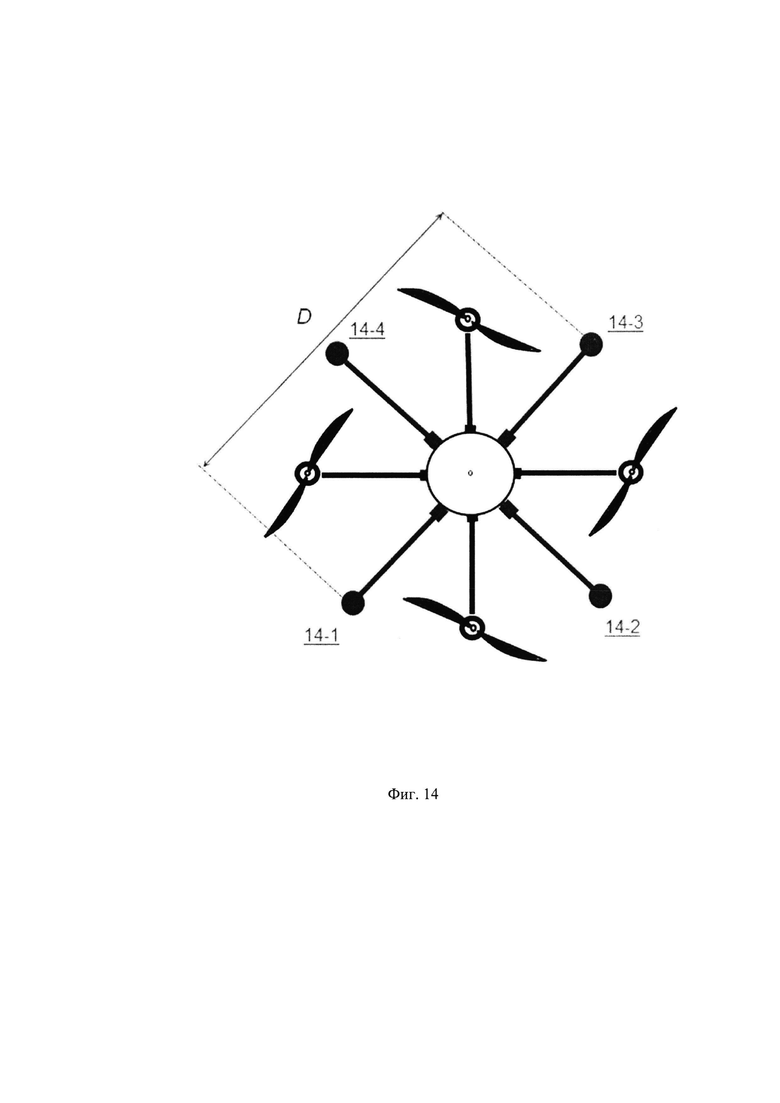
На Фиг. 14 - изображен принцип размещения отражателей на БПЛА. Цифрами 14-1, 14-2, 14-3, 14-4 обозначены отражатели, установленные на БПЛА, D - расстояние между отражателями.
Целью предлагаемого изобретения является разработка способа определения пространственных координат и углового положения удаленного объекта, который должен обеспечить реализацию следующих задач:
- обеспечение возможности определения положения удаленного объекта (БПЛА) с точностью в диапазоне 0.002-0.005 м (2-5 мм), в отличие от прототипа,
- обеспечение возможности определения углового положения (так называемые углы крена, рысканья и тангажа) удаленного объекта (БПЛА), с точностью 1' (60'' угловых секунд) и лучше, в реальном режиме времени, в отличие от прототипа;
- обеспечение возможности вычисления приближенных координат объекта не по углам и расстояниям дальномерного узла-наводчика, а по результатам спутниковых-геодезических измерений, в отличие от прототипа;
- обеспечение возможности определения положения (пространственных координат) объекта (БПЛА), посредством проведения минимального количества измерений без сравнения получаемого положения объекта, определяемого в двух соседних по порядку дальномерных станциях до тех пор, пока разница координат объекта в двух соседних по порядку станциях не станет менее порогового значения, в отличие от прототипа;
- обеспечение высокой технологичности реализации процесса наведения (наблюдения) на удаленный объект, в отличие от прототипа;
- обеспечение снижения трудоемкости реализации процесса наведения на удаленный объект и определения его координат, в отличие от прототипа;
- обеспечение возможности автоматизации приема/передачи полученной информации (координат и углов) в режиме реального времени для установленного на БПЛА оборудования, в отличие от прототипа.
Более детально, заявленное техническое решение предназначено для:
• Определения приближенного положение объекта (координат), что выполняется без использования углов и расстояний, замеряемых посредством угломерно-дальномерного устройства.
• Определения с высокой точностью - не менее 0.005 м (5 мм) в реальном режиме времени и в режиме постобработки, пространственных координат Χ, Υ, Ζ объекта (БПЛА).
• Определения с высокой точностью - с точностью 1' (60'' угловых секунд) и лучше, в реальном режиме времени, углового положения (три угла Эйлера) объекта.
• Определения точного пространственного и углового положения из обработки множества измеренных расстояний до объекта (пересечением сфер) от трех или более дальномерных станций.
Цели, поставленные заявленным техническим решением, и заявленный технический результат обеспечиваются посредством использования заявленной последовательности действий, изложенной в независимом пункте формулы изобретения заявленного способа.
Заявленное техническое решение в отношении заявленного способа определения пространственных координат и углового положения удаленного объекта представляет собой систему, содержащую минимум три дальномерные станции (пункта), например - 1, 2, 3, которые являются неподвижными относительно земной поверхности, располагаются на любом расстоянии друг от друга, не должны находиться на одной линии и должны образовать треугольник в плане. При этом прямая видимость между пунктами должна быть обеспечена на период измерения расстояния между ними (дальномерными станциями).
Сущность способа определения пространственных координат и углового положения удаленного объекта с помощью дальномерных станций состоит в применении не менее трех дальномерных станций, пространственно расположенных на некотором удалении друг от друга и от удаленного объекта, в пределах прямой видимости удаленного объекта, при этом координаты дальномерных станций определяют в пространственной системе координат, при этом дальномерные станции наводят свои дальномеры на удаленный объект и определяют расстояния до удаленного объекта, после этого координаты удаленного объекта определяют пересечением сфер с центрами в трех или более дальномерных станциях, вычисляют примерные координаты положения удаленного объекта, отличающийся тем, что выполняют ориентацию дальномерных станций следующим образом: дальномерную станцию 1 ориентируют на дальномерную станцию 2, дальномерную станцию 2 ориентируют на дальномерную станцию 3, дальномерную станцию 3 ориентируют на дальномерную станцию 1, с возможностью увеличения количества дальномерных станций до 4-х и более, выполняют измерения расстояний между дальномерными станциями, вычисляют и задают пространственную систему координат, при этом координаты каждой последующей, 4-ой и более, дальномерной станции определяют в пространственной системе координат, заданной дальномерными станциями 1, 2, 3 посредством измерения расстояний от каждой последующей, 4-ой и более, дальномерной станции до дальномерных станций 1, 2, 3, определяют в общеземной системе координат посредством ГЛОНАСС/GPS оборудования координаты дальномерных станций и удаленного объекта, который представляет собой беспилотный летательный аппарат, определяют параметры перехода из общеземной системы координат в пространственную систему координат, определяют примерные, с точностью до 2 м, координаты беспилотного летательного аппарата в пространственной системе координат, задаваемой дальномерными станциями с использованием параметров перехода из общеземной системы координат в пространственную систему координат, вычисляют горизонтальный и вертикальный углы наведения для каждой из дальномерных станций, наводят в автоматическом режиме дальномерные станции на беспилотный летательный аппарат, измеряют расстояние от дальномерной станции до отражателей, закрепленных на беспилотном летательном аппарате, далее на базе измеренных расстояний до каждого отдельного отражателя определяют координаты каждого отражателя с использованием способа пересечения сфер из трех или более дальномерных станций, определяют точные координаты беспилотного летательного аппарата в пространственной системе координат, как среднее значения между координатами всех отражателей, вычисляют угловое положение беспилотного летательного аппарата, т.е. определяют угловое положение беспилотного летательного аппарата на основе вычисленных координат отражателей, далее вычисляют пространственные координаты точек на местности по измеренным координатам их изображений, полученных фотокамерой, установленной на беспилотном летательном аппарате, с использованием координат беспилотного летательного аппарата и углового положения беспилотного летательного аппарата в пространственной системе координат.
Далее заявитель представляет более детальное описание заявленного способа.
На пунктах 1, 2, 3 размещаются дальномерные станции (далее по тексту - ДС). Дальномерные станции ориентируются следующим образом:
ДС на пункте 1 ориентируется на ДС на пункте 2;
ДС на пункте 2 ориентируется на ДС на пункте 3;
ДС на пункте 3 ориентируется на ДС на пункте 1.
Далее ДС измеряют расстояния между опорными пунктами и от каждого опорного пункта до отражателей, установленных на удаленном объекте (БПЛА).
Количество отражателей, устанавливаемых на объекте, должно быть не менее трех. Оптимальное число отражателей - четыре, т.к. установка четвертого отражателя обеспечивает менее трудоемкий процесс определения углового положения БПЛА.
Геометрический центр фигуры, в вершинах которой располагаются отражатели, должен совпадать с геометрическим центром объекта (БПЛА).
Измерение расстояний между опорными пунктами (ДС) 1, 2, 3 позволяет задать произвольную точную пространственную систему координат (далее по тексту ТСК).
Измерения расстояний от опорных точек (ДС) до отражателей, закрепленных на удаленном объекте (БПЛА), позволяют методом линейной пространственной засечки определить в указанной системе координат (ТСК) следующие параметры:
• координаты X0j, Y0j, Z0j каждого отражателя;
• координаты Х0, Υ0, Ζ0 объекта как среднее значение соответствующих координат каждого отражателя;
• угловое положение объекта по отношениям разностей координат между соответствующими отражателями и расстоянию между ними.
При этом угловое положение (углы α, ω, χ) определяются по следующим формулам (Фиг. 10):



где:
- Z01, Z02, Z03, Z04 - координата Ζ отражателей 1, 2, 3, 4;
- Y01, Υ02 - координата Υ отражателей 1 и 2;
- Bp - базис между отражателями.
Количество опорных пунктов (ДС), неподвижных относительно земной поверхности, при необходимости, может быть увеличено до 4-х и более.
При этом координаты каждого последующего пункта (ДС) определяют в системе координат заданной точками (ДС) 1, 2, 3 посредством измерения точных расстояний (точность от 1 до 2-х мм) до пунктов (ДС), задающих указанную систему координат (ТСК).
Высокая точность определения положения БПЛА и углов ориентирования БПЛА обеспечивается высокой точностью измерения расстояний лазерными дальномерами ДС. Точность измерения расстояния лазерным дальномером составляет также 1-2 мм.
Для обеспечения возможности реализовать поставленные цели осуществляют следующую последовательность действий, которая позволяет выполнить наведение ДС на удаленный объект (БПЛА):
• Определяют координаты ДС в общеземной системе координат, в которой осуществляется навигация БПЛА. Координаты определяются с помощью ГЛОНАСС/GPS-навигатора, установленного на ДС.
• Определяют координаты БПЛА в общеземной системе координат (далее по тексту ОСК). В этой системе координат осуществляется планирование маршрута (траектории) полета и навигация БПЛА. Координаты определяются с помощью ГЛОНАСС/GPS-навигатора, установленного на БПЛА.
По координатам опорных пунктов (ДС) в общеземной системе координат (ОСК) и в точной системе координат (ТСК) вычисляют параметры перехода из ОСК в ТСК.
• Определяют примерные координаты  БПЛА в ТСК (точность ±2 м), исходя из вычисленных ранее параметров перехода из ОСК в ТСК.
БПЛА в ТСК (точность ±2 м), исходя из вычисленных ранее параметров перехода из ОСК в ТСК.
• По координатам БПЛА вычисляют горизонтальный и вертикальный углы наведения каждой ДС на БПЛА, при этом горизонтальный угол отсчитывают от линии, соединяющей соответствующие два опорных пункта (ДС), а вертикальный угол отсчитывают от плоскости Х0, Y0, задаваемой опорными пунктами 1, 2, 3 соответственно.
• Каждая ДС, по вычисленным для нее горизонтальным и вертикальным углам наведения на БПЛА, наводится на БПЛА и выполняет измерения расстояний от ДС до БПЛА (до отражателей на нем размещенных).
При этом задачу по измерению расстояния от отдельной ДС до каждого отражателя, установленного на БПЛА, осуществляют исходя из следующего принципа: «один отражатель должен быть доступен, остальные недоступны». Время доступности отражателя определено значением τ. Замеры расстояний до остальных отражателей производятся в любой последовательности, или, например, в последовательности 1-2-3-4 (см. Фиг. 11).
Далее для выделения и идентификации информации - от какой из имеющихся ДС было измерено расстояние, по каждой из этих ДС измерения расстояний ДС выполняется в любой очередности с обязательным условием наличия временного интервала смещения (временного сдвига) ts между ДС.
Впоследствии полученные приведенными выше действиями точные значения пространственных координат и углов ориентирования БПЛА (снимков) используются для определения пространственных координат точек местности с использованием известного метода пространственной фотограмметрической засечки (см. Фиг. 3).
При этом следует обратить внимание на то, что характерной особенностью заявленного технического решения, в отличие от известных из исследованного уровня техники технических решений на дату подачи настоящей заявки, является то, что в заявленном техническом решении не требуется размещения на местности дополнительных опорных точек, кроме требуемых, необходимых и достаточных (ДС).
Ниже приведено описание системы (совокупности отдельных устройств, объединенных в один объект-систему) для реализации заявленного способа.
Система в целом включает наземную измерительную систему и систему, закрепленную на объекте (БПЛА) и состоит из не менее чем шести отдельных сборочных элементов, включая три дальномерные станции, а именно (см. Фиг. 12):
1. Дальномерные станции (ДС), установленные на штативы, в количестве не менее трех штук.
2. Блок управления дальномерными станциями.
3. БПЛА, оснащенный отражателями (не менее 3-х отражателей). 4. Блок управления БПЛА.
Более подробно сборочные элементы состоят:
1. Дальномерная станция (см. Фиг.13) представляет собой устройство, состоящее из следующих элементов:
• лазерного дальномера, например, DIMETIXFLS-C10,DIMETIXFLS-СНЗО (Швейцария);
• ГЛОНАСС/GPS навигатора, например, типа NovAtelFlexPak6 (Канада);
• отражательной призмы, например, типа LeicaGRZ122, LeicaGRZ101 (Швейцария);
• системы наведения на удаленный объект (БПЛА) по горизонтальному и вертикальному углу, определяемых на основе данных ГЛОНАСС/GPS навигаторов, установленных на дальномерном блоке и на БПЛА;
• видеокамеры для отображения процесса наведения (на другую ДС, БПЛА) на экране монитора блока управления дальномерной станцией, например, BoscamHD19;
• радиопередатчика для связи с блоком управления дальномерными станциями (ДС), например, типа BoscamBOS350 (Китай);
• трегера, например, NikonW30 (Япония), LeicaGDF311 (Швейцария).
Дальномерную станцию (ДС) устанавливают на штатив, применяемый для установки геодезических приборов. ДС предназначена для выполнения следующих операций (измерений):
a) Измерение расстояний до аналогичной ДС (по лучу, отраженному от размещенного
на нем отражателя, см. Фиг. 11). Точность измерения 1-2 мм. Наведение ДС на аналогичную ДС осуществляется в полуавтоматическом или в ручном режиме с использованием блока управления ДС, при этом процесс наведения отображается на экране монитора блока управления ДС.
b) Измерение расстояния от ДС до отражателей, размещенных на БПЛА, осуществляется с точностью 1-2 мм. Наведение дальномера на БПЛА выполняется в автоматическом режиме по двум углам (горизонтальному и вертикальному) относительно осей точной системы координат, точность наведения (отслеживания) по каждому углу составляет от 10 до 60 угловых минут. При этом процесс наведения отображается на экране монитора блока управления ДС.
Информация о измеренных расстояниях, наведение на ДС и БПЛА при помощи радиосвязи передается на блок управления ДС. Количество ДС - не менее трех.
2. Блок управления дальномерными станциями (ДС) представляет собой устройство, состоящее из следующих элементов:
• портативной персональной электронно-вычислительной машины (ППЭВМ), например, типа Notebook, или «Планшет»;
• внешнего приемо-передающего модуля, подключаемого к ППЭВМ, например, производства фирмы «Геоскан».
• манипулятора типа «джойстик» или «мышь»;
• специального программного обеспечения, позволяющего производить следующие вычисления:
- задание точной системы координат (ТСК) на основе расстояний, измеренных между ДС;
- определение параметров перехода из ОСК в ТСК;
- определение предварительного положения (координат) БПЛА в ТСК;
- определение углов наведения (горизонтального, вертикального) каждой ДС на БПЛА;
- определение точного пространственного и углового положения БПЛА по расстояниям, измеренным от ДС до отражателей, размещенных на БПЛА.
Назначение блока управления дальномерными станциями (ДС) следующее:
a) наведение одной ДС на другую ДС, например, по схеме 1-2-3-1;
b) измерение расстояний между двумя ДС, например, между 1-2, 2-3, 3-1;
c) наведение ДС на БПЛА (удаленный объект);
d) измерение расстояния между ДС и БПЛА;
e) отображение, контроль на мониторе (дисплее) процесса наведения одного ДС на другое ДС, а также наведения ДС на БПЛА;
f) синхронизация/разсинхронизация работы ДС при измерении расстояний от ДС до БПЛА;
g) сбор информации:
- расстояний, измеренных ДС (до другой ДС, до БПЛА);
- координат ДС и БПЛА в общеземной системе координат (ОСК),получаемых при помощи встроенных в них ГЛОНАСС/GPS навигаторов;
h) обработка информации:
- задание точной системы координат (ТСК);
- вычисление параметров перехода из ОСК в ТСК;
- вычисление предварительного положения (координат) БПЛА в ТСК;
- вычисление углов наведения (горизонтального, вертикального) каждой ДС на БПЛА;
- вычисление точного пространственного и углового положения БПЛА по расстояниям, измеренным от ДС до отражателей, размещенных на БПЛА;
i) передача информации, а именно - углов наведения (горизонтального и вертикального) каждой ДС на БПЛА.
3. БПЛА, оснащенный отражателями. В качестве БПЛА-мультикоптера может быть использован:
1. Серийно выпускаемый БПЛА известных марок, например, «Геоскан-401» (квадрокоптер), разработанный группой компаний "Геоскан" (Россия) или Vulcan UAV BlackWidow X8 (октоптер), разработанный AeroVironment, Inc. (США) и другие.
2. Специально разработанный БПЛА-мультикоптер для достижения целей и задач заявленного изобретения.
Количество отражателей, закрепляемых на БПЛА, должно быть не менее трех. При установке четырех отражателей обеспечиваются более простой и менее трудоемкий процесс определения углового положения БПЛА. Один из вариантов расположения 4-х отражателей на БПЛА типа квадрокоптер приведен на Фиг.14. Расстояние между двумя отражателями (базис В) может быть изменяемым (увеличение, уменьшение) за счет конструкции крепления отражающего устройства. При этом значение базис может быть определено с точностью до нескольких десятых долей миллиметра (не хуже 0.5 мм).
Отражатель должен обеспечивать возвратное отражение лазерного луча, т.е. отражение луча в обратном направлении (в строну ДС) при любом угле попадания на него лазерного луча, исходящего от ДС. Отражатель может быть, например, призменным, выполненным, в частности, с применением триппель призм.
С целью достижения однозначности, а именно - до какого отражателя измерено расстояние от конкретной ДС, измерение расстояния от отдельной ДС до каждого отражателя, установленного на БПЛА, осуществляется по принципу: «один отражатель доступен, остальные недоступны». Время доступности отражателя TD.
Доступность отдельного отражателя и недоступность остальных может быть, например, обеспечена механическим образом: использование принципа роторного затвора (Фиг. 14). Например, при диаметре отражателя 30 мм, диаметр ротора составит порядка 12 0 мм. При скорости вращения ротора 2400 оборотов в минуту время доступа TD одного отражателя составит 0.0063 сек, а время опроса четырех отражателей будет не более 0.025 сек. При увеличении скорости вращения в два раза время доступа одного отражателя и опроса 4-х отражателей уменьшится вдвое и соответственно составит: 0.0032 и 0.012 сек. Данных временных интервалов будет достаточно для многократного измерения одного и того же расстояния до отдельного отражателя.
Для выделения информации по каждой ДС - от какой ДС выполнено измерение расстояний до отражателей на БПЛА, измерения расстояний ДС выполняется по очереди: за счет введения временного сдвига ts неодновременного измерения расстояний разными ДС. Временной сдвиг может составлять не более:

где TD - время доступа одного отражателя, n - количество ДС. Например, при n=3 и времени доступа одного отражателя 0,0063 сек временной сдвиг должен быть не более 0.002 сек.
Скорость движения БПЛА будет определяться видом решаемой задачи. Так, для формирования 3D-модели здания (сооружения) скорость БПЛА будет минимальной (3-5 км/час и менее). При съемке для построения, например, цифровой модели рельефа (ЦМР) скорость БПЛА может достигать несколько десятков километров в час (50 км/час). Смещение БПЛА в пространстве составит соответственно не более 2 мм и 30 мм для ts=0.002 сек, что сравнимо с точностью определения пространственных координат для построения 3D-модели здания и ЦМР.
3. Блок управления БПЛА представляет собой устройство, состоящее из следующих элементов:
• портативной персональной электронно-вычислительной машины (ППЭВМ), например, типа Notebook, или «Планшет»;
• внешнего приемо-передающего модуля, подключаемого к ППЭВМ, например, производства фирмы «Геоскан»;
• манипулятора типа «джойстик» или «мышь»;
• специального программного обеспечения, позволяющего производить планирование полета и т.п.
Назначение блока управления БПЛА следующее:
1. Управление БПЛА во время полета, в том числе и ручном режиме;
2. Контроль положения БПЛА на соответствие полетному заданию;
3. Визуализация изображения, получаемой съемочной камерой.
В качестве блока управления БПЛА может быть использован:
1. Блок (модуль) управления для серийно выпускаемых БПЛА известных марок, например, «Геоскан-401» (квадрокоптер), разработанный группой компаний "Геоскан" (Россия) или Vulcan UAV BlackWidow Х8 (октоптер), разработанный AeroVironment, Inc. (США) и другие.
2. Специально разработанный блок управления для достижения целей и задач заявленного изобретения.
На основании изложенного выше можно сделать общий вывод, что заявителем достигнут заявленный технический результат, а именно - установлены значения линейных и угловых элементов внешнего ориентирования снимков, необходимых для определения пространственных координат точек местности (объекта) по измеренным координатам их изображений на снимках, полученных с использованием беспилотного летательного аппарата, оснащенного соответствующим оборудованием, программным обеспечением.
Заявленное техническое решение реализовано в виде натурного объекта, прошло апробирование в полевых условиях и получило подтверждение возможности реализовать все заявленные цели, а именно:
- обеспечена возможность определения положения удаленного объекта (БПЛА) с точностью в диапазоне 2-5 мм, в отличие от прототипа;
- обеспечена возможность определения углового положения (так называемые углы крена, рысканья и тангажа) удаленного объекта (БПЛА), с точностью 1' (60'' угловых секунд) и лучше, в реальном режиме времени, в отличие от прототипа;
- обеспечена возможность вычисления приближенных координат объекта не по углам и расстояниям дальномерного узла-наводчика, а по результатам спутниковых-геодезических измерений, в отличие от прототипа;
- обеспечена возможность определения положения (пространственных координат) объекта (БПЛА) посредством проведения минимального количества измерений без сравнения получаемого положения объекта, определяемого в двух соседних по порядку дальномерных станциях, до тех пор, пока разница координат объекта в двух соседних по порядку станциях не станет менее порогового значения, в отличие от прототипа;
- обеспечена высокая технологичность реализации процесса наведения (наблюдения) на удаленный объект, в отличие от прототипа;
- обеспечено снижение трудоемкости реализации процесса наведения на удаленный объект и определения его координат, в отличие от прототипа;
- обеспечена возможность автоматизации приема/передачи полученной информации (координат и углов) в режиме реального времени для установленного на БПЛА оборудования, в отличие от прототипа.
Заявленное техническое решение реализуется с помощью разработанного заявителем программного комплекса, состоящего из 8-ми вычислительных программ (вычисление точной системы координат, вычисление параметров преобразования из общеземной системы координат в точную систему координат, вычисление приближенных координат БПЛА в точной системе, вычисление углов наведения дальномерной станции на БПЛА, вычисление точных координат БПЛА по измеренным расстояниям от дальномерных станций до БПЛА, планирование полета БПЛА, управление дальномерными станциями, управление отражателями «доступен/недоступен», установленных на БПЛА).
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлена совокупность признаков, приведенная в независимом пункте заявленного технического решения.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлены технические решения с заявленной совокупностью существенных признаков, приведенных в независимом пункте заявленного технического решения, и не выявлены технические результаты, реализуемые посредством применения указанных признаков. Кроме указанного, заявленное техническое решение является неочевидным для специалиста в силу того, что позволяет получить результаты определения пространственных координат с точностью, соответствующей замерам традиционными геодезическими приборами и способами, что на дату представления заявленных материалов на основании проведенного анализа уровня техники не представлялось возможным реализовать на практике.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, т.к. реализовано в виде натурного объекта, прошло апробирование в полевых условиях и получило подтверждение возможности реализовать все заявленные цели и технический результат.
Использованные источники.
1. Назаров А.С. Фотограмметрия. - Минск: ТерраСистемс, 2010. - 400 с.
2. Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. - М.: Академический проект.2016. - 296 с.
3. Бабашкин Н.М., Кадничанский С.Α., Нехин С.С. Сравнение эффективности аэрофототопографической съемки с использованием беспилотных и пилотируемых авиационных систем. Геопрофи, №1, 2017. - с. 14-19.
4. Безменов В.М., Гараев Н.Н, Мухутдинова Г.Р., Козырева А.В. Применение беспилотных летательных аппаратов для решения задач топографии и геодезии. Практический опыт. Сборник 5-ой междунар. науч.-практическойконф. Актуальные вопросы геодезии и геоинформационных систем. - Казань, 2016. - с. 115-121.
5. Фетисов В.С., Неугодникова Л.M., Адамовский В.В., Красноперов Р.А. Беспилотная авиация: терминология, классификации, современное состояние. - Уфа: ФОТОН, 2014. - 217 с.
6. Бауэре П. Летательные аппараты нетрадиционных схем. - М.: Мир, 1991, 200 с.
7. Медведев Е.М. Интегральные навигационные комплексы GPS/IMU. Геопрофи, №3, 2005. - с. 39-40.
8. Костюк А.С. Навигационное обеспечение аэрофотосъемки с беспилотных летательных аппаратов. Автоматизированные технологии изысканий и проектирования, №3(50), 2013. - с. 52-55.
9. Обиралов А.И., Лимонов А.Н., Гаврилова Л.А. Фотограмметрия. - М.: КолосС. 2016. - 240 с.
10. Патент РФ № 2567865 от 01.07.2014. Квашенников В.В., Шабанов А.К. Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов.
11. Соловьев Ю.А. Системы спутниковой навигации. - М.: Экотрендз. 2000. - 268 с.
12. Безменов В.М., Сафин К.И., Гараев Н.Н. Возможность построения измерительного комплекса на основе беспилотного летательного аппарата. Сборник 6-ой международной научно-практической конференции. Актуальные вопросы геодезии и геоинформационных систем. - Казань, 2017. - с. 182-189.


Изобретение относится к области геодезии, картографии, фотограмметрии, навигации. Достигаемый технический результат – определение пространственных координат точек местности (объекта) по измеренным координатам их изображений на снимках, полученных с использованием беспилотного летательного аппарата. Указанный результат достигается за счет применения не менее трёх дальномерных станций (ДС), расположенных на некотором удалении друг от друга и от удаленного объекта, в пределах прямой видимости удаленного объекта, при этом координаты ДС определяют в пространственной системе координат (ПСК), при этом ДС наводят свои дальномеры на удаленный объект и определяют расстояния до удаленного объекта, после этого координаты удаленного объекта определяют пересечением сфер с центрами в трёх или более ДС, вычисляют примерные координаты положения удаленного объекта, выполняют ориентацию ДС относительно друг друга определенным образом, с возможностью увеличения количества ДС до 4-х и более, выполняют измерения расстояний между ДС, вычисляют и задают ПСК, при этом координаты каждой последующей, 4-й и более, ДС определяют в ПСК, заданной ДС 1, 2, 3 посредством измерения расстояний от каждой последующей, 4-й и более ДС до ДС 1, 2, 3, определяют в общеземной системе координат (ОСК) посредством ГЛОНАСС/GPS координаты ДС и удаленного объекта, который представляет собой беспилотный летательный аппарат (БПЛА), определяют параметры перехода из ОСК в ПСК, определяют примерные, с точностью до 2 м, координаты БПЛА в ПСК, задаваемой ДС с использованием параметров перехода из ОСК в ПСК, вычисляют горизонтальный и вертикальный углы наведения для каждой из ДС, наводят в автоматическом режиме ДС на БПЛА, измеряют расстояние от ДС до отражателей, закреплённых на БПЛА, далее на базе измеренных расстояний до каждого отдельного отражателя определяют координаты каждого отражателя с использованием способа пересечения сфер из трёх или более ДС, определяют точные координаты БПЛА в ПСК как среднее значение между координатами всех отражателей, вычисляют угловое положение БПЛА, вычисляют пространственные координаты точек на местности по измеренным координатам их изображений, полученных фотокамерой, установленной на БПЛА, с использованием координат БПЛА и углового положения БПЛА в ПСК. 14 ил.
Способ определения пространственных координат и углового положения удаленного объекта с помощью дальномерных станций, заключающийся в применении не менее трёх дальномерных станций, пространственно расположенных на некотором удалении друг от друга и от удаленного объекта, в пределах прямой видимости удаленного объекта, при этом координаты дальномерных станций определяют в пространственной системе координат, при этом дальномерные станции наводят свои дальномеры на удаленный объект и определяют расстояния до удаленного объекта, после этого координаты удаленного объекта определяют пересечением сфер с центрами в трёх или более дальномерных станциях, вычисляют примерные координаты положения удаленного объекта, отличающийся тем, что выполняют ориентацию дальномерных станций следующим образом: дальномерную станцию 1 ориентируют на дальномерную станцию 2, дальномерную станцию 2 ориентируют на дальномерную станцию 3, дальномерную станцию 3 ориентируют на дальномерную станцию 1, с возможностью увеличения количества дальномерных станций до 4-х и более, выполняют измерения расстояний между дальномерными станциями, вычисляют и задают пространственную систему координат, при этом координаты каждой последующей, 4-й и более, дальномерной станции определяют в пространственной системе координат, заданной дальномерными станциями 1, 2, 3 посредством измерения расстояний от каждой последующей, 4-й и более, дальномерной станции до дальномерных станций 1, 2, 3, определяют в общеземной системе координат посредством ГЛОНАСС/GPS оборудования координаты дальномерных станций и удаленного объекта, который представляет собой беспилотный летательный аппарат, определяют параметры перехода из общеземной системы координат в пространственную систему координат, определяют примерные, с точностью до 2 м, координаты беспилотного летательного аппарата в пространственной системе координат, задаваемой дальномерными станциями с использованием параметров перехода из общеземной системы координат в пространственную систему координат, вычисляют горизонтальный и вертикальный углы наведения для каждой из дальномерных станций, наводят в автоматическом режиме дальномерные станции на беспилотный летательный аппарат, измеряют расстояние от дальномерной станции до отражателей, закреплённых на беспилотном летательном аппарате, далее на базе измеренных расстояний до каждого отдельного отражателя определяют координаты каждого отражателя с использованием способа пересечения сфер из трёх или более дальномерных станций, определяют точные координаты беспилотного летательного аппарата в пространственной системе координат как среднее значение между координатами всех отражателей, вычисляют угловое положение беспилотного летательного аппарата, т.е. определяют угловое положение беспилотного летательного аппарата на основе вычисленных координат отражателей, далее вычисляют пространственные координаты точек на местности по измеренным координатам их изображений, полученных фотокамерой, установленной на беспилотном летательном аппарате, с использованием координат беспилотного летательного аппарата и углового положения беспилотного летательного аппарата в пространственной системе координат.
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА С ПОМОЩЬЮ ДАЛЬНОМЕРНО-УГЛОМЕРНЫХ ПРИБОРОВ | 2014 |
|
RU2567865C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И СКОРОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА (ВАРИАНТЫ) | 2010 |
|
RU2465615C2 |
| US 7952521 B2, 31.05.2011 | |||
| WO 2008046363 A1, 24.04.2008 | |||
| EP 1489381 A2, 23.12.2004 | |||
| JP 2010034797 A, 12.02.2010. | |||

