Изобретение относится к измерительной технике, а именно к технологии измерений превышений с использованием методов фотограмметрии, в частности, при аэрогеофизических исследованиях
Известны способ и система определения поправки за рельеф местности при выполнении азрогеофизической съемки, которые включают получение изображения исследуемой зоны, определение геологического состава указанной зоны с использованием данных зафиксированного изображения, определение поправки на рельеф местности для данной геофизической местности (патент РФ №2442193, G01V 3/38). Поправка за рельеф местности вычисляется с использованием данных изменений высоты поверхности или, более конкретно, с учетом изменений высоты летательного аппарата над поверхностью обследуемой зоны. Данные об указанной высоте могут быть получены различными способами, например с использованием данных глобальной системы позиционирования, лазерного локатора, радиолокационными методами.
Известны аэрофотограмметрические способы определения координат и высот точек исследуемой поверхности по фотографическим изображениям, получаемым с помощью летательных аппаратов любых видов, путем измерений, выполняемых по двум или более фотоснимкам, полученным из разных точек пространства. Основные принципы аэрофотограмметрии заключаются получении пары перекрывающихся снимков поверхности и последующем анализе полученного изображения (А.Н.Лобанов. Фотограмметрия, Москва, «Недра», 1984, стр.232-242, прототип). Описанная в указанном источнике классическая аэрофотограмметрия ориентирована, в большей мере, на построение модели рельефа или местности с учетом известной высоты фотографирования и/или опорных точек и не может быть в полной мере использована при определении, в частности, высоты полета измерительной системы, буксируемой летательным аппаратом, так как в данном случае для получения достоверных данных по аэрофотоснимкам большое значение приобретает ориентация в пространстве и технические характеристики установленных на подвижном объекте фотокамер.
Известно устройство для аэрогеофизической разведки, содержащее летательный аппарат, буксирующий горизонтально расположенную под ним электромагнитную систему, включающую аппаратурный блок, излучающую антенну, приемную антенну (патент РФ №2201603, C01V 3/17, прототип). Указанная электромагнитная система выполнена в виде аэрогеофизической платформы, включающей несущий корпус с расположенными на нем излучающей антенной, аппаратурным блоком, прикрепленным к несущему корпусу, и приемной антенной. Аппаратурный блок размещен в контейнере и является энергетически автономным. Бортовой измерительный комплекс содержит бортовой компьютер, связанный с приемником сигналов ГНСС, а также высотомер.
К недостаткам данного устройства следует отнести ограниченные функциональные возможности, а именно то, что в нем осуществляется измерение только высоты носителя, но не предусмотрено измерение высоты превышения непосредственно аэрогеофизической измерительной платформы над земной поверхностью, что является значимой информацией при интерпретации аэрогеофизических измерений (данных).
Задачей группы изобретений является расширение арсенала средств измерения превышений подвижных объектов над земной поверхностью с использованием фотограмметрии, в том числе при проведении аэрогеофизических работ.
Технический результат группы изобретений - получение информации о высотном положении подвижного объекта, в частности, при аэрогеофизических исследованиях, а также дополнительной фотографической информации, которая также может быть использована при обработке данных, полученных в ходе аэрогеофизических исследований.
Заявленный технический результат достигается за счет того, что способ определения превышений подвижного объекта над исследуемой поверхностью характеризуется тем, что
- на подвижном объекте устанавливают на известном расстоянии В друг от друга две предварительно откалиброванные, синхронно работающие фотокамеры с возможностью получения ими двух перекрывающихся фотоснимков исследуемой поверхности
- на подвижном объекте устанавливают связанную с блоком управления инерциальную систему с возможностью измерения угловых положений подвижного объекта в каждый момент времени;
в процессе движения (полета) осуществляют синхронную фотосъемку исследуемой поверхности с заданными временными интервалами, запись времени срабатывания фотокамер и запись данных (показаний) инерциальной системы о соответствующем угловом положении подвижного объекта,
- по результатам измерений углового положения подвижного объекта в каждый момент фотосъемки определяют Bz, проекцию базиса В на ось Z, в системе координат с началом в точке фотографирования одной из камер,
- выполняют фотограмметрическую обработку материалов съемки для каждой синхронно получаемой пары фотоснимков с получением координат ХА, YA, ZA точки А на исследуемой поверхности - проекцией центральной точки базиса В подвижного объекта на исследуемую поверхность,
- превышение h подвижного объекта над исследуемой поверхностью определяют по координатам указанной центральной (средней) точки базиса В соответствии с выражением
Где Bz - проекция базиса В на ось Z,
ZA - аппликата точки А на исследуемой поверхности.
При этом указанная фотограмметрическая обработка полученных пар фотоснимков включает
- определение составляющих базиса (BX, BY, BZ), с использованием которых вычисляют координаты центра подвижного объекта в фотограмметрической системе координат;
- по известным фокусным расстояниям и координатам главных точек снимков для каждой из фотокамер и координатам точек снимков (х1, y1, х2, y2) в шести характерных зонах осуществляют расчет элементов взаимного ориентирования снимков в фотограмметрической системе координат;
- с учетом данных инерциальной системы (данных об угловом положении фотокамер в каждый момент времени) осуществляют переход к внешней вспомогательной системе координат, задаваемой измерениями ИНС и величиной базиса;
- на левом и правом снимках по координатам ХА, YA и приближенному значению высоты (Z) полета вычисляют координаты измеряемой точки на обоих снимках (x1, y1)A и (x2, y2)A, с помощью коррелятора выполняется итерационный подбор аппликаты ZA с перевычислением координат (x1, y1)A и (x2, y2)A до максимального значения коэффициента корреляции для областей снимков в указанных точках,
- после чего по полученным величинам ZA и BZ вычисляют искомую величину h - превышение подвижного объекта над исследуемой поверхностью.
Преимущественно указанным подвижным объектом является аэрогеофизическая платформа.
Заявленный технический результат достигается также тем, что в устройстве для аэрогеофизической разведки, содержащем буксируемую летательным аппаратом снабженную блоком позиционирования ГНСС аэрогеофизическую платформу, включающую несущий корпус с установленными на нем аппаратурным блоком, излучающей антенной, приемной антенной, согласно изобретению указанная аэрогеофизическая платформа снабжена инерциальным блоком, блоком управления и установленными в заданное угловое положение относительно плоскости платформы на указанном несущем корпусе, синхронно работающими фотокамерами, расположенными на известном расстоянии (базисе) друг друга с возможностью получения пары перекрывающихся фотоснимков исследуемой поверхности, при этом первый вход указанного блока управления связан с выходом точного времени блока позиционирования, второй вход - с выходом инерциального блока, а управляющий выход с затворами каждой из указанных фотокамер.
Преимущественно указанные инерциальный блок и блок управления расположены в едином корпусе, а указанные фотокамеры установлены на уровне приемного центра аэрогеофизической платформы.
При этом указанные фотокамеры установлены с возможностью регулировки их углового положения относительно плоскости указанной аэрогеофизической платформы.
На фиг.1 показан общий вид устройства согласно изобретению; на фиг.2 приведена блок-схема устройства согласно изобретению; на фиг.3 приведена схема, иллюстрирующая способ согласно изобретению; на фиг 4 показана блок-схема последовательности операций при обработке пар фотоснимков при реализации способа.
Устройство согласно изобретению содержит аэрогеофизическую платформу 1, связанную с летательным аппаратом (не показано). На указанной аэрогеофизической платформе 1 преимущественно на уровне приемного центра аэрогеофизической платформы 1 установлены фотокамера 2 и фотокамера 3, а также инерциальная система 4 и блок 5 управления. Фотокамеры 2, 3 установлены на жестких специальных креплениях (не показано), выполненных с возможностью регулировки углового положения указанных фотокамер 2, 3. Первый вход указанного блока 5 управления связан с выходом сигнала точного времени приемником сигналов ГНСС, второй вход - с выходом инерциального блока 4, а управляющий выход - с затворами каждой из указанных фотокамер 2 и 3.
Инерциальная система 4 включает трехосевой гироскоп, измеряющий эйлеровы элементы (углы) ориентации платформы в пространстве и трехосевой акселерометр, измеряющий моментальные ускорения по осям x, y, z, необходимые для ввода корректирующих поправок в измерения гироскопа за уход оси.
Блок 5 управления представляет собой портативный компьютер, снабженный специализированной программной, обеспечивающей прием и запись сигналов точного времени, данных инерциального блока 4 и подачу команд на срабатывание фотокамер 2, 3.
Данные, записанные в блоке 5 управления, и материалы фотосъемки фотокамер 2 и 3 после окончания сеанса аэрогеофизических исследований загружаются в стационарный компьютер 6, обеспечивающий обработку материалов съемки, как это будет показано далее.
На геофизической платформе 1 инерциальная система 4 и блок 5 управления могут быть размещены в одной аппаратурной капсуле 7 (фиг.1).
Способ согласно изобретению основан на геометрической обратимости точек перекрывающейся пары фотоснимков 8, 9, полученной при фотосъемке из разных точек пространства S1 и S2 с помощью фотокамер 2 и 3 с фокусными расстояниями, f1 и f2 соответственно, расположенных в указанных точках S1 и S2 на известном расстоянии друг от друга, базисе В (фиг.3). Согласно заявляемому техническому решению превышение h подвижного объекта над исследуемой поверхностью, в частности, аэрогеофизической платформы, например над точкой А - проекцией центра платформы на исследуемую поверхность, определяется для точки S0, находящейся между фотокамерами 2, 3, в центре базиса В.
Искомое значение указанного превышения h может быть найдено на основании вычитания вектора S1A из вектора S1S0 (см. фиг.3) с учетом равенства составляющих указанных векторов по осям X и Y из выражения, выведенного авторами:
где BZ - проекция базиса В на ось Z,
ZA - аппликата точки А.
Таким образом, в ходе реализации способа должно быть обеспечено нахождение указанных величин Bz и ZA.
Работы в соответствии с заявленной группой изобретений осуществляются в следующей последовательности операций.
На подвижном объекте, например аэрогеофизической платформе 1, на известном расстоянии, базисе В, друг от друга устанавливают предварительно откалиброванные фотокамеры 2 и 3 с возможностью получения ими двух перекрывающихся фотоснимков 8, 9 исследуемой поверхности. На указанной аэрогеофизической платформе 1 устанавливают также инерциальную систему 4 с возможностью измерения угловых положений аэрогеофизической платформы 1 и соответственно указанных фотокамер 2 и 3 в каждый момент времени и блок 5 управления. Работа блока 5 управления синхронизована сигналами точного времени от спутниковой системы позиционирования.
В процессе перемещения аэрогеофизической платформы 1 над исследуемой поверхностью по командам с блока управления 5 осуществляется синхронная фотосъемка исследуемой поверхности. Срабатывания затворов фотокамер 2 и 3 осуществляется с заданными временными интервалами, синхронизированными сигналами точного времени, поступающими на блок 5 управления со спутниковой системы позиционирования. Синхронизация времени может производиться единожды перед выполнением полета, далее работы могут вестись по системному времени блока 5 управления. При этом в блоке 5 управления осуществляется запись моментов времени фотографирования (подачи команд). Одновременно в блок 5 управления поступают и записываются данные инерциальной системы 4 о текущем угловом положении аэрогеофизической платформы 1, необходимые для дальнейшей фотограмметрической обработки каждой из пар получаемых фотоснимков 8, 9
Указанная обработка осуществляется по известным из фотограмметрии зависимостям в блоке 6 обработки и включает (фиг.4):
1. Ввод в блок 6 обработки данных из блока 5 управления и материалов съемки с фотокамер 2, 3.
2. Вычисление составляющих BX, BY, BZ базиса В по углам крена (αпл), тангажа (ωпл) и курса (kпл) платформы во вспомогательной системе координат S1XYZ, задаваемой инерциальной навигационной системой 4. (поз.10, фиг.4).
3. Вычисление координат ХА, YA центра S0 подвижной платформы 1 в указанной системе координат S1XYZ. (поз.11, фиг.4).
4. По известным фокусным расстояниям f1 и f2 фотокамер 2, 3 и известным координатам главных точек о1 и о2 снимков 8, 9 (xo1, y01, хо2, уо2) из предварительной калибровки для каждой из фотокамер 2, 3 и плоским координатам соответственных точек снимков 8, 9 (x1, y1, x2, y2) в шести характерных зонах (измеряемых на снимках 8, 9 автоматизировано, поз.12, фиг.4) осуществляют расчет элементов взаимного ориентирования (углы 




5. С учетом данных инерциальной системы 4 (данных об угловом положении фотокамер 2, 3 в каждый момент времени αпл, ωпл, kпл) осуществляют переход (поз.14, фиг.4) к указанной вспомогательной системе S1XYZ (вычисление элементов внешнего ориентирования снимков 8, 9, участвующих в дальнейших вычислениях).
6. Далее на левом и правом снимках 8, 9 по координатам ХА, YA и приближенному значению высоты Z в системе координат S1XYZ, определяют координаты измеряемой точки на обоих снимках (x1, y1)A и (x2, y2)A и (х2, у2)А. С помощью коррелятора выполняется итерационный подбор аппликаты ZA.(поз.15 - поз 16, фиг.4).
7. По полученным величинам ZA в результате корреляции и значению BZ (согласно п.2) вычисляется искомая величина h - превышение подвижной платформы 1 над исследуемой поверхностью в точке А (фиг.3) в процессе проведенной аэрогеофизической съемки (поз.17, фиг.4), как
Где Bz - проекция базиса В на ось Z,
ZA - аппликата точки А.
Описанные выше операции осуществляют для каждой пары фотоснимков, получаемых в процессе перемещения аэрогеофизической платформы над исследуемой поверхностью с получением, таким образом, информации об ее превышениях в точках фотографирования на протяжении всего маршрута.
Использование технического решения согласно группе изобретений, в частности, при проведении аэроэлектроразведочных работ обуславливает более точное определение превышений аэрогеофизической платформы за счет учета ее углов наклона относительно земной поверхности. Кроме того, данное техническое решение является достаточно экономичным по сравнению, например, с методиками, основанными на измерениях лазерными высотомерами или радиовысотомерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ПОЛЁТА ПОДВИЖНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592042C1 |
| Способ определения высоты платформы из привязного беспилотного летательного аппарата | 2024 |
|
RU2831621C1 |
| СПОСОБ ДИСТАНЦИОННО-НЕКОНТАКТНОГО ОПРЕДЕЛЕНИЯ УРОВНЯ СРЕДЫ В РЕЗЕРВУАРЕ | 2001 |
|
RU2208768C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ФОТОСЪЁМКЕ С БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2726902C1 |
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ СТРОИТЕЛЬНЫХ ЛЕСОВ | 1969 |
|
SU254846A1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
Изобретение относится к измерительной технике, а именно к технологии измерений превышений с использованием методов фотограмметрии, в частности, при аэрогеофизических исследованиях. Способ определения превышений подвижного объекта над исследуемой поверхностью характеризуется тем, что на подвижном объекте устанавливают на известном расстоянии В друг от друга две предварительно откалиброванные синхронно работающие фотокамеры с возможностью получения ими двух перекрывающихся фотоснимков исследуемой поверхности. На подвижном объекте устанавливают связанную с блоком управления инерциальную систему с возможностью измерения угловых положений подвижного объекта в каждый момент времени. В процессе движения осуществляют синхронную фотосъемку исследуемой поверхности, запись времени срабатывания фотокамер и запись данных инерциальной системы. В устройстве для аэрогеофизической разведки, реализующем способ, аэрогеофизическая платформа снабжена инерциальным блоком, блоком управления, а также установленными в заданное угловое положение, синхронно работающими фотокамерами, расположенными на известном расстоянии друг друга с возможностью получения ими пары перекрывающихся фотоснимков исследуемой поверхности. Технический результат группы изобретений - получение информации о высотном положении подвижного объекта, в частности, при аэрогеофизических исследованиях. 2 н. и 5 з.п. ф-лы, 4 ил.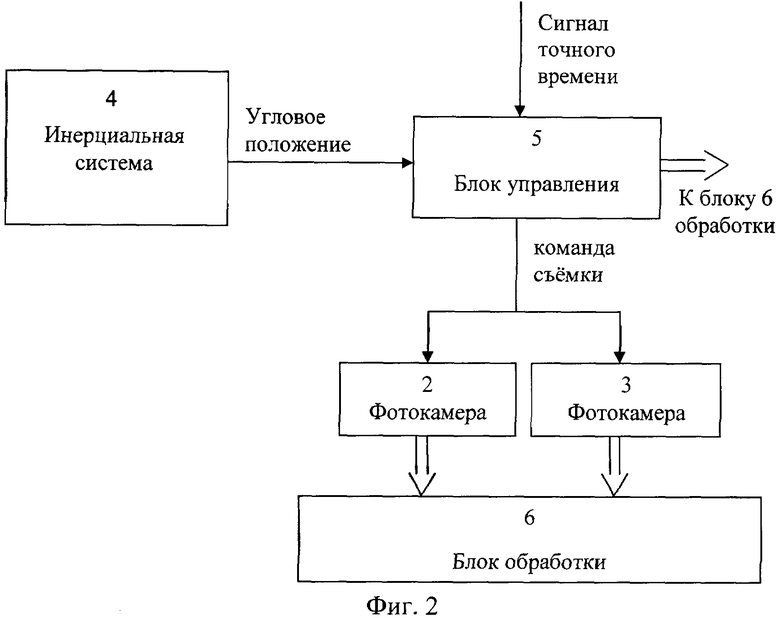
1. Способ определения превышений подвижного объекта над исследуемой поверхностью, характеризующийся тем, что
- на подвижном объекте устанавливают на известном расстоянии В друг от друга две предварительно откалиброванные синхронно работающие фотокамеры с возможностью получения ими двух перекрывающихся фотоснимков исследуемой поверхности;
- на подвижном объекте устанавливают связанную с блоком управления инерциальную систему с возможностью измерения угловых положений подвижного объекта в каждый момент времени;
- в процессе движения (полета) осуществляют синхронную фотосъемку исследуемой поверхности с заданными временными интервалами, запись времени срабатывания фотокамер и запись данных (показаний) инерциальной системы о соответствующем угловом положении подвижного объекта;
- по результатам измерений углового положения подвижного объекта в каждый момент фотосъемки определяют Bz, проекцию базиса В на ось Z, в системе координат с началом в точке фотографирования одной из камер;
- выполняют фотограмметрическую обработку материалов съемки для каждой синхронно получаемой пары фотоснимков с получением координат ХА, YA, ZA точки А на исследуемой поверхности - проекцией центральной точки базиса В подвижного объекта на исследуемую поверхность;
- превышение h подвижного объекта над исследуемой поверхностью определяют по координатам указанной центральной (средней) точки базиса В соответствии с выражением
;
где Bz - проекция базиса В на ось Z,
ZA - аппликата точки А на исследуемой поверхности.
2. Способ по п.1, характеризующийся тем, что указанная фотограмметрическая обработка полученных пар фотоснимков включает
- вычисление составляющих базиса (BX, BY, BZ), с использованием которых вычисляют координаты центра подвижного объекта в фотограмметрической системе координат;
- по известным фокусным расстояниям и координатам главных точек снимков для каждой из фотокамер и координатам точек снимков (х1, y1, х2, y2) в шести характерных зонах осуществляют расчет элементов взаимного ориентирования снимков в фотограмметрической системе координат;
- с учетом данных инерциальной системы (данных об угловом положении фотокамер в каждый момент времени) осуществляют переход к внешней вспомогательной системе координат, задаваемой измерениями ИНС и величиной базиса;
- на левом и правом снимках по координатам ХА, YA и приближенному значению высоты (Z) полета вычисляют координаты измеряемой точки на обоих снимках (x1, y1)A и (x2, y2)A, с помощью коррелятора выполняется итерационный подбор аппликаты ZA с перевычислением координат (x1, y1)A и (x2, y2)A до максимального значения коэффициента корреляции для областей снимков в указанных точках;
- после чего по полученным величинам ZA и BZ вычисляют искомую величину h - превышение подвижного объекта над исследуемой поверхностью.
3. Способ по п.1, отличающийся тем, что указанным подвижным объектом является аэрогеофизическая платформа.
4. Устройство для аэрогеофизической разведки, содержащее буксируемую летательным аппаратом, снабженную блоком позиционирования ГНСС аэрогеофизическую платформу, включающую несущий корпус, с установленными на нем аппаратурным блоком, излучающей антенной, приемной антенной, отличающееся тем, что указанная аэрогеофизическая платформа снабжена инерциальным блоком, блоком управления и установленными в заданное угловое положение относительно плоскости платформы на указанном несущем корпусе, синхронно работающими фотокамерами, расположенными на известном расстоянии (базисе) друг друга с возможностью получения пары перекрывающихся фотоснимков исследуемой поверхности, при этом первый вход указанного блока управления связан с выходом точного времени блока позиционирования, второй вход - с выходом инерциального блока, а управляющий выход с затворами каждой из указанных фотокамер.
5. Устройство по п.4, отличающееся тем, что инерциальный блок и блок управления расположены в едином корпусе.
6. Устройство по п.4, отличающееся тем, что указанные фотокамеры установлены на уровне приемного центра аэрогеофизической платформы.
7. Устройство по п.4, отличающееся тем, что указанные фотокамеры установлены с возможностью регулировки их углового положения относительно плоскости платформы.
| Конденсационное устройство для паровых машин | 1926 |
|
SU8402A1 |
| Электростатический микрофон | 1930 |
|
SU24003A1 |
| US 20100265360 А1, 21.10.2010 | |||
| RU 2007135603 A, 27.03.2009. | |||

