Изобретение относится к геофизическому приборостроению и предназначено для использования в системах вертикального сейсмопрофилирования в буровых скважинах при поиске полезных ископаемых.
При поиске и разведке нефтегазовых месторождений все более широкое применение находит метод вертикального сейсмического профилирования (ВСП), который проводится в глубоких вертикальных или близких к вертикальным обсаженных и необсаженных скважинах. Он позволяет детально изучить строение и упругие параметры горных пород в околоскважинном пространстве, а также процессы распространения сейсмических волн различной поляризации (продольных и поперечных) во внутренних точках среды. Для регистрации в скважинах упругих колебаний, возбуждаемых на поверхности при помощи взрывов или вибраторов, применяются трехкомпонентные сейсмические зонды. В их состав входят наземный блок управления, регистрации и обработки данных и 3-6 идентичных скважинных приборов, последовательно соединенных между собой отрезками каротажного кабеля. Измерения этой аппаратурой производятся поточечно, путем последовательного старт-стопного перемещения всех скважинных приборов зонда с заданным шагом по стволу скважины. Поскольку при взрыве в земле возбуждаются одна продольная (Р) и две поперечные волны (SV и SH) с различной пространственной поляризацией (направлением смещения частиц), для их раздельной регистрации во внутренних точках среды используются блоки сейсмоприемников, расположенные в каждом скважинном приборе. Оси чувствительности сейсмоприемников каждого блока ориентированы ортогонально друг другу для раздельной регистрации соответственно Р-, SV- и SH-волн.
Одна из проблем, возникающих при анализе информации сейсмоприемников, заключается в выделении сигналов каждой из компонент сейсмоволны в случае анизотропного строения геологических пород. Идеальный случай, позволяющий получить однозначные характеристики каждой из компонент в изотропных геологических породах, представляет собой ситуацию, когда оси чувствительности сейсмоприемников соответствующих каналов направлены по осям системы координат, две оси которой лежат в вертикальной плоскости, содержащей точку пункта возбуждения и центр измерительного блока скважинного прибора. Однако такое положение осей чувствительности сейсмоприемников при неуправляемом движении скважинного прибора маловероятно. Поэтому сейсмоприемники регистрируют результаты интерференции SV- и SH-волн, что существенно затрудняет получение достоверной информации о состоянии околоскважинного пространства.
Одним из возможных приемов повышения точности и достоверности сейсмических исследований является способ определения угла поворота приборной системы координат, связанной с направлениями осей чувствительности сейсмоприемников, относительно локальной системы координат. В этом случае с помощью величины найденного угла можно осуществить приведение сигналов сейсмоприемников к направлениям осей локальной системы координат, ориентированной относительно пункта возбуждения.
Один из возможных способов определения этого угла принят в качестве аналога предлагаемого изобретения [Никольский А.А. К вопросу об обработке PS- и SS-волн в анизотропных средах. В кн. "Алгоритмические проблемы обработки данных сейсморазведки". - Новосибирск: Наука, Сибирское отделение, 1987. - С. 66-79]. При этом искомый угол определяется косвенным путем при одновременной обработке сигналов, снимаемых с сейсмоприемников. В общем случае алгоритм разделения SV- и SH-волн, а следовательно, и определения угла поворота приборной системы координат относительно локальной, включает в себя этапы выделения группы колебаний, соответствующей времени отражения от изучаемой границы и ограниченной двумя соседними максимумами функций; получения полярных сейсмограмм путем подстановки дискретных значений приращения искомого угла; вычисления критерия подобия сигналов для каждого значения угла; нахождения экстремального значения критерия подобия и отождествления SV- и SH-волн с полярными сейсмограммами; определения времени задержки между SV- и SH-волнами (сдвига, соответствующего максимальному значению функции взаимной корреляции волн). Указывается, что успех в разделении SV- и SH-волн зависит прежде всего от возможности выбора информативного критерия подобия. В частности, функция взаимной корреляции может быть применена в качестве критерия подобия лишь в случае, если разделяемые сигналы имеют не более 2-3 положительных экстремумов, их энергии приблизительно равны и по крайней мере в 2 раза превышают уровень помех.
Приведенный выше подход позволяет разделить информацию сейсмоприемников на компоненты SV- и SH-волн, однако он требует вычисления спектральных характеристик и связан с весьма большими затратами машинного времени. Также утверждается, что уверенное и однозначное разделение сигналов, непосредственно связанное с определением угла поворота приборной и локальной систем координат, возможно далеко не всегда и в первую очередь затруднения возникают при существенно нелинейной поляризации сейсмических волн. Кроме того, приведенный выше метод не учитывает возможности отклонения осей приборной системы координат от горизонтальной плоскости.
Известны сейсмоизмерительные системы, в которых производится непосредственное определение угла между осями чувствительности сейсмоприемников и направлением на пункт возбуждения. Способ измерения искомого угла, реализуемый в скважинной аппаратуре "МОСТ", выбран в качестве прототипа [Лебедев К.А., Суздальницкий Ф.М., Максимов В.И., Меньтюков А.А., Сафиулин Г.Г. Скважинная трехкомпонентная аппаратура. В кн. "Многоволновые сейсмические исследования". - Новосибирск: Наука, Сибирское отделение, 1987. - С.103-108]. Положение блока сейсмоприемников, размещенного в скважинном приборе указанной аппаратуры, определяется с помощью трехстепенного гироскопа в кардановом подвесе. Ось вращения ротора гироскопа, сохраняя неизменным свое направление в пространстве, является носителем этого опорного направления в азимуте, задаваемого на поверхности перед началом исследований в скважине. По мере спуска скважинного прибора, подвешенного на каротажном кабеле, происходит его вращение и, следовательно, поворот осей чувствительности сейсмоприемников, связанных с корпусом скважинного прибора. Но так как угол поворота скважинного прибора относительно неподвижного в пространстве направления главной оси гироскопа фиксируется с помощью датчика угла, определяется и положение осей чувствительности сейсмоприемников относительно неподвижного в азимуте направления, заданного на поверхности при начальной выставке (ориентировании) гироскопа скважинного прибора.
Способ определения ориентации сейсмоприемников состоит из нескольких этапов. Перед началом исследований из точки устья скважины определяют географический азимут пункта возбуждения. Затем механически фиксируют корпус скважинного прибора в скважине так, чтобы он был неподвижен, разгоняют ротор заарретированного гироскопа, определяют положение в азимуте характерной оси корпуса скважинного прибора (например, связанной с механизмом прижимного устройства), проводят разарретирование гироскопа, измеряют с помощью датчика угла, установленного по внешней оси гироскопа, угол положения главной оси последнего относительно направления характерной оси корпуса скважинного прибора. Суммируя два вышеупомянутых угла, получают азимут главной оси гироскопа.
После этого скважинный прибор опускают в скважину на точку замера, где его с помощью прижимного устройства заякоривают относительно стенки скважины. С помощью датчика угла гироскопа определяют угол поворота корпуса скважинного прибора (соответственно и осей чувствительности сейсмоприемников) относительно неподвижной в пространстве главной оси гироскопа. Величину полученного угла алгебраически суммируют со значением азимута главной оси гироскопа, получая тем самым азимут нового положения характерной оси скважинного прибора, а так как взаимное положение упомянутой характерной оси и осей чувствительности сейсмоприемников задано однозначно, то находят и азимут последних. Угол между направлением на пункт возбуждения и осью чувствительности сейсмоприемника находят вычитанием азимута пункта возбуждения из азимута оси чувствительности сейсмоприемника. Полученное значение этого угла может быть использовано как для аналитического приведения сигналов сейсмоприемников к направлениям осей локальной системы координат, так и для осуществления механического разворота блока сейсмоприемников (что реализовано, в частности, в аппаратуре "МОСТ"). Затем гироскоп арретируют и гиромотор отключают от сети.
После полной остановки гиромотора, когда исчезают создаваемые им шумы, производят возбуждение сейсмических колебаний и их измерение. Вслед за этим производятся запуск гиромотора, разарретирование гироскопа, согласование показания датчика угла гироскопа со значением азимута характерной оси скважинного прибора (т.е. получение информации о новом азимуте главной оси гироскопа), отключение прижимного устройства и перемещение скважинного прибора на новую точку замера, где повторяют приведенный выше набор операций. Точность азимутального ориентирования осей чувствительности сейсмоприемников определяется точностью хранения заданного направления трехстепенным гироскопом на переходах из одной точки замера к другой (в промежутках между операциями разарретирования и арретирования), а также точностью определения начальной ориентации гироскопа на поверхности.
Трудности создания трехстепенного гироскопа для геофизической скважинной аппаратуры, имеющего малую скорость дрейфа, а также необходимость учета видимого ухода, технические и организационные сложности определения начальной ориентации главной оси гироскопа являются причинами получения информации невысокой точности об ориентации осей чувствительности сейсмоприемников.
В этой связи поставлена задача повышения точности и производительности сейсморазведки методом вертикального сейсмического профилирования.
Поставленная задача решается следующим образом. При определении на устье скважины географического азимута пункта возбуждения дополнительно измеряют проекции векторов угловой скорости вращения Земли и ускорения силы тяжести на оси приборной системы координат, которая образована направлениями осей чувствительности сейсмоприемников. Затем рассчитывают угловое положение приборной системы координат относительно горизонтальной географически ориентированной системы координат, после чего определяют географические азимуты проекций осей чувствительности сейсмоприемников, а углы в горизонтальной плоскости между проекциями осей чувствительности сейсмоприемников и направлением на пункт возбуждения определяют алгебраическим вычитанием азимута пункта возбуждения из азимутов горизонтальных проекций осей чувствительности сейсмоприемников.
Сущность изобретения заключается в следующем. Угловое положение объекта в пространстве, в том числе и внутри буровой скважины, можно определить, зная направления относительно объекта хотя бы двух векторов, которыми характеризуются внешние физические поля. Замеряя составляющие каждого из этих векторов на оси приборной системы координат, образованной направлениями осей чувствительности измерителей, и оценивая их величины, можно рассчитать угол между осью чувствительности измерителя и вектором того физического поля, для определения характеристики которого предназначен данный измеритель. Так как оси чувствительности измерителей однозначно связываются с корпусом объекта, то естественно, что положение последнего также будет однозначно определено относительно опорной системы координат, связанной с направлением векторов выбранных физических полей.
Предлагается использовать два вектора, лежащих в вертикальной плоскости - вектор ускорения силы тяжести  и вектор угловой скорости вращения Земли
и вектор угловой скорости вращения Земли  на основе которых строится правая горизонтальная географически ориентированная система координат. В качестве измерителей компонент указанных векторов выбраны линейные акселерометры и гироскопические измерители угловой скорости. Соответствующая математическая обработка информации, поступающей с чувствительных элементов, позволит определить положение приборной системы координат, образованной осями чувствительности акселерометров и гироскопических измерителей угловой скорости, относительно опорной - горизонтальной, географически ориентированной. В дальнейшем несложно определить географические азимуты проекций на горизонтальную плоскость осей приборной системы координат, а соответственно и осей чувствительности сейсмоприемников, направленных по тем же осям. Алгебраически вычитая из полученных значений азимутов азимут пункта возбуждения, можно найти угол в горизонтальной плоскости между направлением на пункт возбуждения и горизонтальной проекцией оси чувствительности сейсмоприемника.
на основе которых строится правая горизонтальная географически ориентированная система координат. В качестве измерителей компонент указанных векторов выбраны линейные акселерометры и гироскопические измерители угловой скорости. Соответствующая математическая обработка информации, поступающей с чувствительных элементов, позволит определить положение приборной системы координат, образованной осями чувствительности акселерометров и гироскопических измерителей угловой скорости, относительно опорной - горизонтальной, географически ориентированной. В дальнейшем несложно определить географические азимуты проекций на горизонтальную плоскость осей приборной системы координат, а соответственно и осей чувствительности сейсмоприемников, направленных по тем же осям. Алгебраически вычитая из полученных значений азимутов азимут пункта возбуждения, можно найти угол в горизонтальной плоскости между направлением на пункт возбуждения и горизонтальной проекцией оси чувствительности сейсмоприемника.
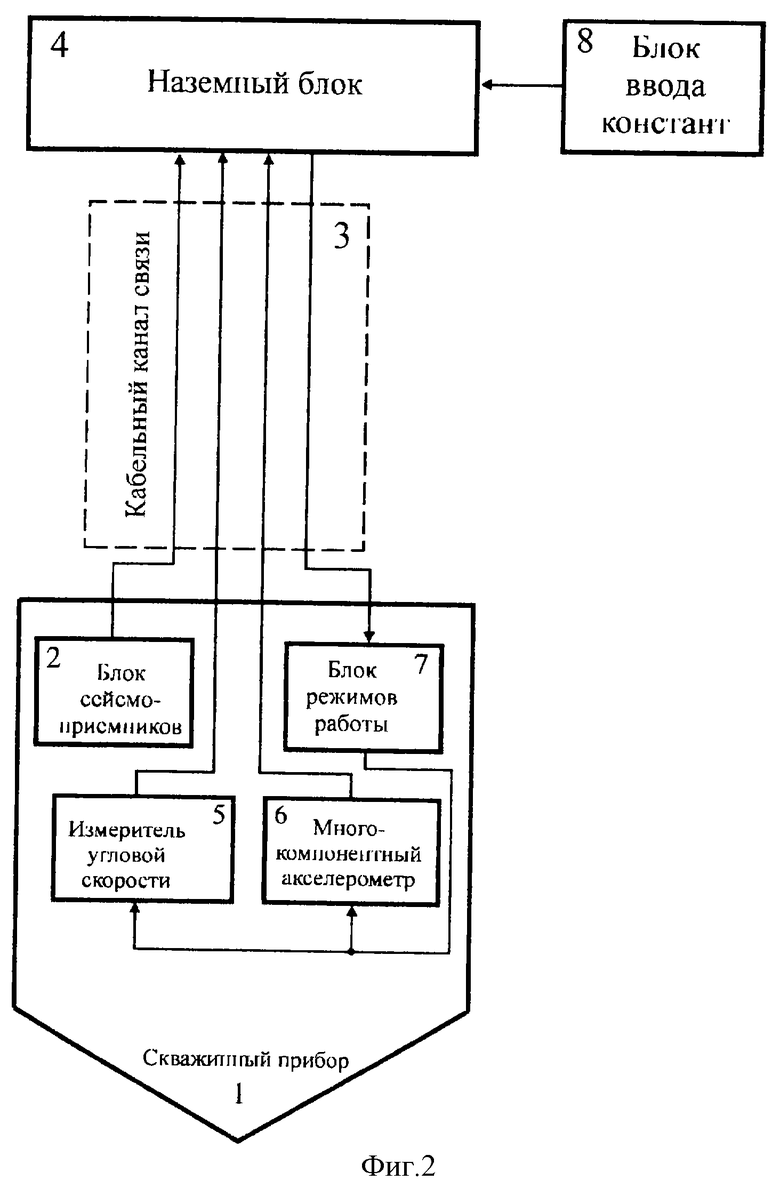
Сущность способа поясняется фиг.1, на которой представлена схема определения углов ориентации приборной системы координат относительно опорной.
Способ осуществляется следующим образом. На фиг.1 представлена опорная, горизонтальная географически ориентированная система координат Oξηζ, где ось Oζ направлена на Север, ось Oζ- вертикально вниз, а ось Oη,- на Восток. На фиг. 1 показаны:  - вектор угловой скорости вращения Земли,
- вектор угловой скорости вращения Земли,  - вектор ускорения силы тяжести, ϕ - географическая широта места. Положение приборной системы координат OXYZ, с осями которой совпадают соответствующие оси чувствительности гироскопических измерителей угловой скорости, акселерометров и сейсмоприемников, может быть определено различными способами; в данном случае применены углы конечных поворотов Эйлера-Крылова, производимых в последовательности Ψ, Θ, Φ. На фиг.1 OXoYoZo - система координат, совпадающая с опорной; Ψ - угол первого поворота системы OXYZ вокруг оси ОХ в начальном ее положении ОХо; Θ-- угол второго поворота системы координат OXYZ вокруг оси OY в положении OY1, которое она приняла после первого поворота; Ф - угол третьего поворота системы координат OXYZ вокруг оси OZ в положении OZ2, которое она приняла после второго поворота. OXoYoZo, OX1Y1Z1, OX2Y2Z2 - соответственно начальное положение системы координат OXYZ, когда ее оси совпадали с соответствующими осями системы координат Oξηζ, и ее положения после первого и второго поворотов. Линия ООпв показывает направление "устье скважины (точка О) - пункт возбуждения (точка Опв)". Угол Aпв - географический азимут пункта возбуждения. Углы ориентации приборной системы координат OXYZ относительно опорной системы Oξηζ можно, в частности, определять по следующим соотношениям [Белянин Л.Н. Скважинная гироскопическая система ориентации сейсмоприемников. //Электронные и электромеханические системы и устройства: Сб. научн. трудов НПЦ "Полюс". Томск, 2001. - С. 373-378]:
- вектор ускорения силы тяжести, ϕ - географическая широта места. Положение приборной системы координат OXYZ, с осями которой совпадают соответствующие оси чувствительности гироскопических измерителей угловой скорости, акселерометров и сейсмоприемников, может быть определено различными способами; в данном случае применены углы конечных поворотов Эйлера-Крылова, производимых в последовательности Ψ, Θ, Φ. На фиг.1 OXoYoZo - система координат, совпадающая с опорной; Ψ - угол первого поворота системы OXYZ вокруг оси ОХ в начальном ее положении ОХо; Θ-- угол второго поворота системы координат OXYZ вокруг оси OY в положении OY1, которое она приняла после первого поворота; Ф - угол третьего поворота системы координат OXYZ вокруг оси OZ в положении OZ2, которое она приняла после второго поворота. OXoYoZo, OX1Y1Z1, OX2Y2Z2 - соответственно начальное положение системы координат OXYZ, когда ее оси совпадали с соответствующими осями системы координат Oξηζ, и ее положения после первого и второго поворотов. Линия ООпв показывает направление "устье скважины (точка О) - пункт возбуждения (точка Опв)". Угол Aпв - географический азимут пункта возбуждения. Углы ориентации приборной системы координат OXYZ относительно опорной системы Oξηζ можно, в частности, определять по следующим соотношениям [Белянин Л.Н. Скважинная гироскопическая система ориентации сейсмоприемников. //Электронные и электромеханические системы и устройства: Сб. научн. трудов НПЦ "Полюс". Томск, 2001. - С. 373-378]: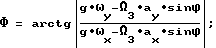

где g - величина ускорения силы тяжести в точке замера;
ax, ay - составляющие кажущегося ускорения, измеряемые акселерометрами;
ΩЗ - величина угловой скорости вращения Земли;
ωx, ωy - составляющие абсолютной угловой скорости, измеряемые гироскопическими измерителями угловой скорости.
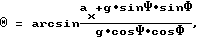
Приведенные выражения (1) соответствуют случаю, когда используются два акселерометра (двухкомпонентный акселерометр) с осями чувствительности, направленными по осям ОХ и OY приборной системы координат; кроме того, измерение компонент вектора угловой скорости вращения Земли производится также только по двум осям ОХ и OY. Естественно, при наличии чувствительных элементов, установленных по оси OZ, выражения для определения углов ориентации могут принять иной вид, в которых будут присутствовать и значения аz и ωz. Азимуты горизонтальных проекций OX', OY', OZ' осей приборной системы координат на фиг.1 представлены углами Ax, Ay, Az. Величины этих углов определяют следующими выражениями: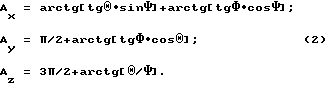
Искомые углы в горизонтальной плоскости αx, αy, αz между проекциями осей чувствительности сейсмоприемников и направлением на пункт возбуждения определяют алгебраическим вычитанием азимута пункта возбуждения из азимутов проекций осей чувствительности сейсмоприемников: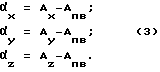
Полученные таким образом значения углов αx, αy, αz применяются в дальнейшем при обработке результатов сейсмических исследований. Отметим, что приведенные выше выкладки применимы только для вертикальных (и близких к вертикальным) скважин, когда перемещение скважинного прибора по скважине не приводит к изменению азимута пункта возбуждения относительно текущей точки замера, т.е. Апв=const.
Знание азимута оси чувствительности сейсмоприемника наряду с известным значением азимута направления на пункт возбуждения позволяет определить угол в горизонтальной плоскости между проекцией оси чувствительности сейсмоприемника и направлением на пункт возбуждения. В свою очередь знание величины упомянутого угла позволит разделить аналитически сигналы сейсмоприемников на компоненты SV- и SH-волн и дать достоверную информацию о параметрах геологических пород в околоскважинном пространстве.
При проведении сейсмических исследований в скважинах применяется трехкомпонентная аппаратура с ориентированными по азимуту сейсмоприемниками: шестиприборный трехкомпонентный ориентируемый зонд с гироскопической ориентацией и системой передачи сейсмической информации способом времяимпульсной модуляции; трехприборный трехкомпонентный зонд с взаимной ориентацией скважинных приборов и др. [Лебедев К. А., Суздальницкий Ф.М., Максимов В.И., Меньтюков А.А., Сафиулин Г.Г. Скважинная трехкомпонентная аппаратура. В кн. "Многоволновые сейсмические исследования" - Новосибирск: Наука, Сибирское отделение, 1987. - С. 103-108]. К настоящему времени технические решения, которые лежат в основе построения указанной аппаратуры, не отвечают современным требованиям точности, надежности, производительности сейсморазведочных работ.
В качестве прототипа устройства выбрана сейсмоизмерительная аппаратура "СТО-М", состоящая из наземного блока и скважинного прибора с магнитной ориентацией, связанных каротажным кабелем [Лебедев К.А., Суздальницкий Ф.М., Максимов В. И. , Меньтюков А.А., Сафиулин Г.Г. Скважинная трехкомпонентная аппаратура. В кн. "Многоволновые сейсмические исследования". - Новосибирск: Наука, Сибирское отделение, 1987. - С.103-108]. Суть магнитной ориентации заключается в том, что датчики магнитного поля (магнитометры) замеряют компоненты вектора магнитного поля Земли, а магнитный азимут оси чувствительности конкретного магнитометра либо определяется аналитически с учетом величин сигналов других магнитометров, либо механически задается определенной величиной (+90o) при помощи следящего привода, на вход которого поступает сигнал с магнитометра.
Основой системы ориентации скважинного прибора устройства-прототипа является феррозондовый дифференциальный датчик. Этот датчик служит нуль-органом магнитного поля Земли и для исключения влияния вертикальной составляющей поля находится в маятниковом подвесе. В зонде использована импульсная следящая система с электродвигателем, который устанавливает ось датчика в направлении Запад-Восток. Угол положения блока трех сейсмоприемников относительно оси чувствительности феррозондового датчика всегда известен, так как задается оператором перед началом исследований, поэтому также будут известны и магнитные азимуты осей чувствительности сейсмоприемников, однозначно определяемые через этот угол. Угол между направлением на пункт возбуждения и каждой из осей чувствительности сейсмоприемников определяется вычитанием магнитного азимута пункта возбуждения из магнитного азимута оси чувствительности данного сейсмоприемника.
Недостатком устройства-прототипа является невысокая точность, присущая большинству систем ориентации по магнитному полю Земли, вызываемая нестабильностью во времени последнего, а также абсолютная невозможность работы такой аппаратуры в обсаженных стальными трубами скважинах.
Задача изобретения - создание устройства, позволяющего определять в горизонтальной плоскости угловое положение проекций осей чувствительности сейсмоприемников относительно направления на пункт возбуждения с большей точностью как в необсаженных, так и в обсаженных буровых скважинах.
Поставленная задача решается следующим образом. Скважинный прибор, в котором установлен блок трех сейсмоприемников, оси чувствительности которых взаимно ортогональны, оснащен чувствительными элементами - многокомпонентным гироскопическим измерителем угловой скорости и многокомпонентным акселерометром, оси чувствительности которых параллельны соответствующим осям сейсмоприемников. Кроме того, в состав скважинного прибора входит блок режимов работы, управляемый сигналом с выхода наземного блока и в свою очередь задающий режимы работы чувствительных элементов посредством связи его выхода с управляющими входами многокомпонентного гироскопического измерителя угловой скорости и многокомпонентного акселерометра. Выходы чувствительных элементов (гироскопического измерителя и акселерометра) посредством кабельного канала связи соединены со вторым и третьим входами наземного блока, которые являются входами вычислителя, представляющего собой составную часть наземного блока. С четвертым входом наземного блока связан блок ввода констант, который предназначен для ввода в вычислитель параметров, характеризующих конкретные условия проведения исследования скважины. С первым входом наземного блока, как и в устройстве-прототипе, связаны выходы блока сейсмоприемников.
Сущность изобретения заключается в том, что положение блока сейсмоприемников в пространстве определяется относительно опорной горизонтальной, географически ориентированной системы координат, две оси которой лежат в вертикальной плоскости (плоскости географического меридиана), образованной векторами ускорения силы тяжести и угловой скорости вращения Земли.
Угловое положение осей чувствительности сейсмоприемников относительно осей опорной системы координат, а также искомые углы в горизонтальной плоскости определяются аналитическим путем наземным вычислителем, на вход которого поступают сигналы с чувствительных элементов: с акселерометра - соответствующие компонентам вектора ускорения силы тяжести, с измерителя угловой скорости - соответствующие компонентам вектора угловой скорости вращения Земли. В данном случае на качество информации чувствительных элементов не влияют наличие ферромагнитных обсадных труб и вариации магнитного поля Земли. Кроме того, современные акселерометры и гироскопические измерители угловой скорости обладают чувствительностью, существенно превышающей чувствительность датчиков, реагирующих на магнитное поле Земли, что в конечном итоге позволяет ожидать и повышение точности определения углов ориентации.
Конструкция изобретения поясняется фиг.2, на которой изображена блок-схема устройства для определения ориентации сейсмоприемников.
Скважинный прибор 1 содержит блок трех сейсмоприемников 2, оси чувствительности которых взаимно ортогональны. Выходные сигналы сейсмоприемников по кабельному каналу связи 3 передаются на первый вход наземного блока 4. В состав скважинного прибора также включены многокомпонентный гироскопический измеритель угловой скорости 5 и многокомпонентный акселерометр 6, направление осей чувствительности которых совпадает с направлением осей чувствительности блока сейсмоприемников. Блок режимов работы 7, также входящий в состав скважинного прибора, по командам с выхода наземного блока 4 изменяет режим работы многокомпонентного гироскопического измерителя угловой скорости 5 и многокомпонентного акселерометра 6 (в частности, отключает питание этих чувствительных элементов перед проведением измерений параметров сейсмоволны и подключает перед проведением процесса ориентирования осей чувствительности в новой точке замера). Передача команд на блок режимов работы 7 и сигналов с гироскопического измерителя угловой скорости 5 и акселерометра 6 также производится посредством кабельного канала связи 3. С четвертым входом наземного блока 4 связан блок ввода констант 8, предназначенный для введения в вычислитель наземного блока некоторых заранее известных постоянных, необходимых для расчета по соответствующим алгоритмам параметров ориентации. С помощью блока ввода констант 8 в вычислитель вводятся значения географического азимута пункта возбуждения из точки устья скважины, широты места проведения исследований, величина ускорения силы тяжести в данной точке пространства, другие величины, которые присутствуют в алгоритме расчета параметров ориентации.
Устройство работает следующим образом. В наземный блок 4 посредством блока ввода констант 8 вводятся значения азимута пункта возбуждения и других параметров, необходимых для проведения расчетов. Скважинный прибор 1 опускается в скважину на первую точку измерений и заякоривается в ней при помощи прижимного устройства. С наземного блока 4 поступает команда на блок режимов работы 7, который подает питание на многокомпонентный гироскопический измеритель угловой скорости 5 и многокомпонентный акселерометр 6. После выхода указанных приборов на рабочий режим с них снимается информация и по кабельному каналу связи 3 передается в наземный блок 4. Вычислитель, входящий в состав последнего, по алгоритмам, построенным на основании выражений (1), определяет параметры ориентации приборной системы координат, по осям которой направлены оси чувствительности гироскопического измерителя и акселерометра. Но так как оси чувствительности блока трех сейсмоприемников 2 совпадают по направлению с соответствующими осями чувствительности гироскопического измерителя и акселерометра, то рассчитанными параметрами ориентации будет характеризоваться и положение трехгранника осей чувствительности блока сейсмоприемников, следовательно, географические азимуты осей чувствительности сейсмоприемников определятся выражениями (2).
Искомые азимуты осей чувствительности сейсмоприемников относительно направления на пункт возбуждения находятся путем алгебраического вычитания величины географического азимута пункта возбуждения (определенного перед началом исследований с помощью гирокомпаса, топографической карты и пр.) из рассчитанных вычислителем величин географического азимута осей чувствительности сейсмоприемников (3). После определения ориентации осей чувствительности блока сейсмоприемников 2 с наземного блока 4 поступает сигнал на блок режимов работы 7, который отключает питание многокомпонентного гироскопического измерителя угловой скорости 5 и многокомпонентного акселерометра 6. После остановки вращения ротора гироскопа, когда исчезают создаваемые им шумы, производится вибровозбуждение (взрыв) в пункте возбуждения и регистрация блоком сейсмоприемников 2 параметров пришедшей сейсмоволны. Сигналы с сейсмоприемников поступают по кабельному каналу связи 3 на первый вход наземного блока 4, где осуществляется их регистрация и обработка. После проведения замера и записи сейсмосигналов прижимное устройство отключается, скважинный прибор освобождается и его перемещают на новую точку замеров, где он вновь заякоривается. Далее производится новый цикл операций, аналогичный рассмотренному выше.
Техническая реализация данного изобретения может быть осуществлена при помощи гироскопических измерителей угловой скорости и акселерометров, широко применяемых в настоящее время в системах ориентации и навигации подвижных объектов. В качестве блока режимов работы скважинного прибора может быть использован дистанционный электромагнитный переключатель. Блок ввода констант - клавиатура ЭВМ, входящей в состав наземного блока.
Данное изобретение позволит повысить точность проведения и производительность сейсморазведочных исследований, а также снизить себестоимость разведочных работ на нефть и газ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 2002 |
|
RU2209448C1 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 2001 |
|
RU2199767C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Способ азимутальной ориентации сейсмоприемников многоприборного трехкомпонентного зонда в скважинах | 1981 |
|
SU1045187A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
Использование: определение ориентации осей чувствительности сейсмоприемников относительно направления на пункт возбуждения при проведении вертикального сейсмопрофилирования. Сущность: измеряют проекции вектора угловой скорости вращения Земли и вектора ускорения силы тяжести на оси приборной системы координат, образованной трехгранником осей чувствительности сейсмоприемников. Рассчитывают угловое положение приборной системы координат относительно горизонтальной географически ориентированной системы координат. Определяют географические азимуты проекций осей чувствительности сейсмоприемников, из значений которых затем вычитают известную величину географического азимута пункта возбуждения. Скважинный прибор предлагаемого устройства содержит блок трех сейсмоприемников с взаимно ортогональными осями чувствительности, блок режимов работы, многокомпонентные акселерометр и гироскопический измеритель угловой скорости. Оси чувствительности акселерометра и измерителя угловой скорости совпадают по направлению с соответствующими осями сейсмоприемников. Выходы сейсмоприемников, акселерометра и измерителя угловой скорости кабельным каналом связи соединены со входами наземного блока, в состав которого входит вычислитель. С наземным блоком связан блок ввода констант, обеспечивающий ввод в вычислитель параметров, характеризующих условия проведения исследований. С выходом наземного блока связан блок режимов работ, управляющий работой акселерометра и измерителя угловой скорости. Технический результат: повышение точности, производительности, снижение себестоимости сейсморазведочных работ. 2 с.п. ф-лы, 2 ил.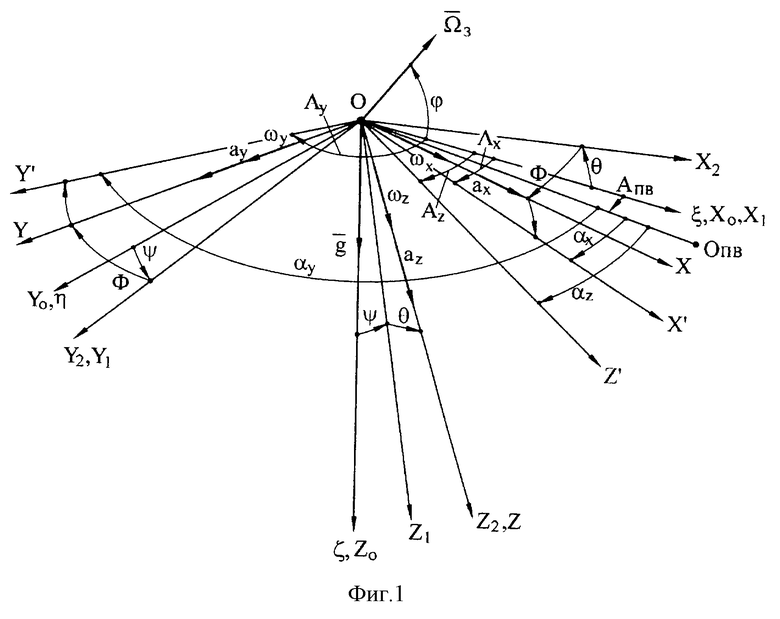
| К.А | |||
| ЛЕБЕДЕВ и др | |||
| Скважинная трехкомпонентная аппаратура в сб | |||
| Многоволновые сейсмические исследования | |||
| /Под | |||
| ред | |||
| Н.Н | |||
| Пузырева, - Новосибирск: Наука, 1987, с.103-108 | |||
| Способ определения ориентации сейсмометра | 1986 |
|
SU1427313A1 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО СЕЙСМОМЕТРА | 1990 |
|
RU2022302C1 |
| US 4987684 A, 29.01.1991. | |||

