Изобретения относятся к точному приборостроению и могут быть использованы для обследования нефтяных и газовых скважин.
Известен способ [1] выработки инклинометрических углов, заключающийся в том, что измеряют величины кажущихся ускорений и проекций угловой скорости по осям приборного трехгранника, связанного с корпусом инклинометра. Цифровой вычислитель корректирует выходные сигналы измерителей угловой скорости и измерителей ускорения в зависимости от температуры внутри корпуса гироинклинометра и вырабатывает по ним величины инклинометрических углов. По скорректированным сигналам измерителей угловой скорости и измерителей ускорения вычисляют грубые величины трех углов взаимного положения приборного трехгранника, связанного с корпусом инклинометра, относительно географического трехгранника в зависимости от величины сигнала измерителя ускорения, имеющего ось чувствительности, параллельную продольной оси инклинометра, путем алгебраических и тригонометрических преобразований. Точные величины этих углов получают путем интегрирования системы дифференциальных уравнений типа Пуассона с использованием грубых величин углов взаимного положения трехгранников. Величины инклинометрических углов определяют по величинам точных значений углов взаимного положения трехгранников, кодируют эти величины и передают по каналу связи на поверхность Земли.
Недостатком данного способа является низкая точность определения зенитного угла и азимута скважины, обусловленная тем, что величины кажущихся ускорений и проекций угловой скорости измеряют по осям приборного трехгранника, связанного с корпусом инклинометра, в результате чего возникают дополнительные погрешности в режиме непрерывного измерения, так как измерители ускорений и измерители угловой скорости участвуют во вращении скважинного прибора вокруг продольной оси.
Наиболее близким к заявленному способу является способ [2] определения зенитного угла и азимута скважин посредством гироскопического инклинометра, включающий измерение с помощью акселерометров ускорения силы тяжести по двум взаимно ортогональным осям, каждая из которых ортогональна продольной оси скважинного прибора гироскопического инклинометра, измерение угловой скорости по одной из названных осей посредством трехстепенного гироскопа, стабилизацию осей чувствительности акселерометров и гироскопа относительно оси, совпадающей с продольной осью скважинного прибора посредством одноосного гиростабилизатора, измерение угла поворота корпуса скважинного прибора относительно этих осей посредством синусно-косинусного трансформатора, определение начальной ориентации осей чувствительности акселерометров в азимуте, формирование матрицы ориентации, вычисление на каждом такте работы вычислителя при движении скважинного прибора в скважине азимута и зенитного угла, например, по формулам:
где i+1 - текущий шаг работы вычислителя;  - элементы матрицы ориентации Аi+1, которую формируют в виде произведения матриц
- элементы матрицы ориентации Аi+1, которую формируют в виде произведения матриц
Аi+1=ΔАi'+1⋅Аi,
где Аi, Аi+1- матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
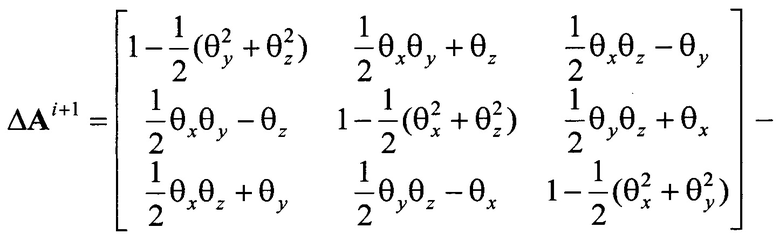
приращение матрицы ориентации, элементы которой определяют в зависимости от углов поворота Θx, Θy, Θz системы координат, определяемой осями чувствительности акселерометров и продольной осью скважинного прибора, относительно собственных осей, причем, начальное значение матрицы ориентации равно
где αхв - азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки,
Недостатком данного способа является низкая точность определения зенитного угла и азимута скважины, обусловленная тем, что в процессе измерения вектор кинетического момента вектора  может быть ориентирован произвольно относительно плоскости горизонта, при этом при отклонении вектора
может быть ориентирован произвольно относительно плоскости горизонта, при этом при отклонении вектора  из плоскости горизонта математическая модель дрейфа гироскопа становится сложной и непредсказуемой, что не позволяет учесть и компенсировать дрейф, вследствие чего происходит накопление ошибки определения азимутального угла осей чувствительности акселерометров при измерении траектории скважин.
из плоскости горизонта математическая модель дрейфа гироскопа становится сложной и непредсказуемой, что не позволяет учесть и компенсировать дрейф, вследствие чего происходит накопление ошибки определения азимутального угла осей чувствительности акселерометров при измерении траектории скважин.
Известен бескарданный гироскопический инклинометр [1], содержащий герметичный цилиндрический корпус, в котором жестко установлены два трехстепенных гироскопа, три одноосных акселерометра, датчик температуры и цифровой вычислитель. При этом акселерометры установлены так, что их оси чувствительности взаимно ортогональны, а ось чувствительности одного из них параллельна продольной оси скважинного прибора, реализуя, таким образом, трехгранник координатных осей, связанный с корпусом инклинометра. Ось собственного вращения гироскопа совпадает с продольной осью скважинного прибора, а ось собственного вращения второго гироскопа перпендикулярна ей. При этом три оси прецессии гироскопов совпадают с тремя осями чувствительности акселерометров, а четвертая ось остается резервной.
Недостатком данного устройства является низкая точность определения зенитного угла и азимута скважины, обусловленная тем, что гироскопы и акселерометры жестко закреплены на корпусе скважинного прибора, поэтому в режиме непрерывного движения скважинного прибора в скважине возникают дополнительные погрешности, обусловленные вращением осей чувствительности датчиков вокруг продольной оси.
Наиболее близким к заявленному устройству является гироскопический инклинометр [2], содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим одноосный гиростабилизатор, на платформе которого жестко установлены два акселерометра, оси чувствительности которых взаимно перпендикулярны и ориентированы перпендикулярно оси стабилизации гиростабилизатора, совпадающей с продольной осью скважинного прибора, и трехстепенной гироскоп, по осям подвеса которого установлены датчики углов и датчики моментов, причем первый датчик угла на измерительной оси гироскопа, совпадающей с измерительной осью одного из акселерометров, подключен через усилитель контура измерения угловой скорости к второму датчику момента, по перпендикулярной к датчику угла оси, а второй датчик угла через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы датчика угла гиростабилизатора, выходы акселерометров и выход измерителя угловой скорости, а каротажный кабель соединен с выходом блока цифровой обработки.
Недостатком данного устройства является низкая точность определения зенитного угла и азимута скважины из-за непрогнозируемого изменения дрейфа гироскопа при отклонении вектора его кинетического момента гироскопа относительно плоскости горизонта.
Технический результат заявленных изобретений заключается в повышении точности определения зенитного угла и азимута скважины.
Задачей, на решение которой направлены изобретения, является стабилизация в процессе измерения вектора  кинетического момента гироскопа в плоскости горизонта.
кинетического момента гироскопа в плоскости горизонта.
Поставленная задача решается за счет того, что в способе определения зенитного угла и азимута скважины посредством гироскопического инклинометра, включающем измерение с помощью акселерометров ускорения силы тяжести по двум взаимно ортогональным осям, каждая из которых ортогональна продольной оси скважинного прибора гироскопического инклинометра, измерение угловой скорости по одной из указанных осей посредством трехстепенного гироскопа, стабилизацию осей чувствительности акселерометров и гироскопа относительно оси, совпадающей с продольной осью скважинного прибора посредством одноосного гиростабилизатора, измерение угла поворота корпуса скважинного прибора относительно этих осей посредством синусно-косинусного трансформатора, определение начальной ориентации осей чувствительности акселерометров в азимуте, формирование матрицы ориентации, вычисление на каждом такте работы вычислителя при движении скважинного прибора в скважине азимута и зенитного угла по формулам:

где i+1 - текущий шаг работы вычислителя;  - элементы матрицы ориентации Аi+1, которую формируют в виде произведения матриц
- элементы матрицы ориентации Аi+1, которую формируют в виде произведения матриц
А i+1=ΔАi+1⋅Аi,
где Аi, Аi+1 - матрицы ориентации на предыдущем и текущем шагах работы вычислителя;
приращение матрицы ориентации, элементы которой определяют в зависимости от углов поворота Θx, Θy, Θz системы координат, определяемой осями чувствительности акселерометров и продольной осью скважинного прибора, относительно собственных осей, причем, начальное значение матрицы ориентации равно
где αхв - азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки, согласно изобретению, в процессе автономной работы на каждом такте работы вычислителя при движении скважинного прибора в скважине, формируют управляющее воздействие на гироскоп по стабилизированной оси, компенсирующее дрейф одноосного гиростабилизатора, дополнительно формируют управляющее воздействие на гироскоп по стабилизированной оси так, чтобы вектор его кинетического момента находился в плоскости горизонта, и определяют угол  поворота по формуле:
поворота по формуле:
 [рад],
[рад],
где τ - период дискретизации,
 - прогноз величины дрейфа гиростабилизатора, с-1;
- прогноз величины дрейфа гиростабилизатора, с-1;
 - проекция угловой скорости вращения Земли на ось стабилизации, с-1;
- проекция угловой скорости вращения Земли на ось стабилизации, с-1;
 - угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, с-1;
- угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, с-1;
определяют углы  поворота, по формулам:
поворота, по формулам: 
где  - элементы матрицы ориентации, формируемые по результатам измерения проекций
- элементы матрицы ориентации, формируемые по результатам измерения проекций  ускорения силы тяжести.
ускорения силы тяжести.
Отличительным признаком заявленного способа является формирование управляющего воздействия на гироскоп по стабилизированной оси, компенсирующее дрейф одноосного гиростабилизатора, формирование управляющего воздействия на гироскоп по стабилизированной оси для сохранения положения вектора кинетического момента в плоскости горизонта с последующим определением углов  поворота, что позволяет повысить точность определения зенитного угла и азимута скважины за счет устранения в процессе измерения отклонения вектора
поворота, что позволяет повысить точность определения зенитного угла и азимута скважины за счет устранения в процессе измерения отклонения вектора  кинетического момента гироскопа из плоскости горизонта.
кинетического момента гироскопа из плоскости горизонта.
В гироскопический инклинометр, содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим одноосный гиростабилизатор, на платформе которого жестко установлены два акселерометра, оси чувствительности которых взаимно перпендикулярны и ориентированы перпендикулярно оси стабилизации гиростабилизатора, совпадающей с продольной осью скважинного прибора, и трехстепенной гироскоп, по осям подвеса которого установлены датчики углов и датчики моментов, причем первый датчик угла на измерительной оси гироскопа, совпадающей с измерительной осью одного из акселерометров, подключен через усилитель контура измерения угловой скорости к второму датчику момента, по перпендикулярной к датчику угла оси, а второй датчик угла через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы датчика угла гиростабилизатора, выходы акселерометров и выход измерителя угловой скорости, а каротажный кабель соединен с выходом блока цифровой обработки, согласно изобретению введен дополнительный усилитель, к входу которого подключен акселерометр, направление оси чувствительности которого совпадает с направлением вектора кинетического момента гироскопа, а выход подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа, а также введены задатчик управляющего сигнала и дополнительный усилитель, при этом выход задатчика управляющего сигнала подключен к входу дополнительного усилителя, а выход усилителя подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа.
Отличительным признаком предложенного гироскопического инклинометра является введение дополнительного усилителя, к входу которого подключен акселерометр, направление оси чувствительности которого совпадает с направлением вектора кинетического момента гироскопа, а выход подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа, а так же введены задатчик управляющего сигнала и дополнительный усилитель, при этом выход задатчика управляющего сигнала подключен к входу дополнительного усилителя, а выход усилителя подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа.
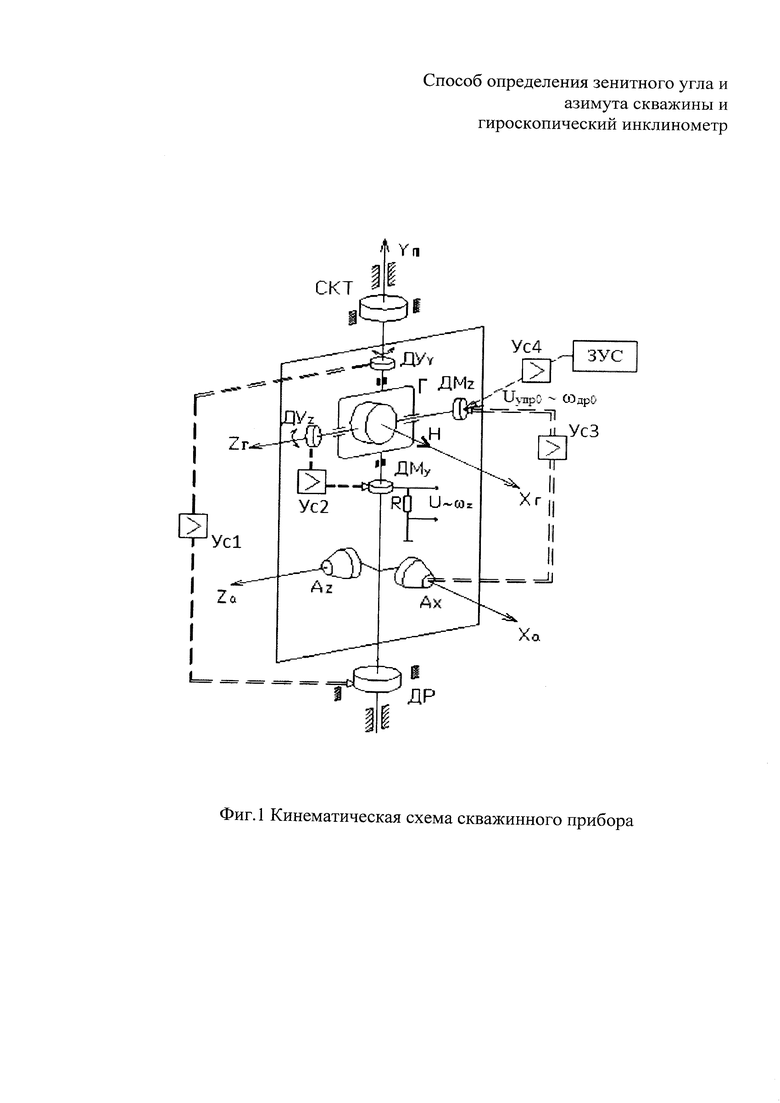
На фиг. 1 представлена кинематическая схема скважинного прибора гироскопического инклинометра.
Предлагаемый способ можно представить в виде следующей последовательности действий и операций.
1. Производится начальная выставка гироскопического инклинометра, по окончании которой формируется начальное значение матрицы ориентации. В режиме начальной выставки определяют азимутальный угол αхв оси чувствительности гироскопа в момент окончания выставки. На начальном такте i=0 формируют начальное значение матрицы ориентации:

Исходя из того, что приращение матрицы ориентации обусловлено малым поворотом на текущем такте i+1, оно формируется в виде матрицы
элементы которой определяют в зависимости от углов Θx, Θy, Θz поворота приборной системы координат относительно собственных осей, а матрица А ориентации на текущем такте формируется в виде

из которой азимут αi+1 и зенитный угол Θ i+1 можно определить, например, по формулам


2. Производится оценка дрейфа ωдр0 гиростабилизатора, по результатам которой определяется значение управляющего воздействия на гироскоп, необходимое для компенсации дрейфа гиростабилизатора.
3. Формируется управляющее воздействие на гироскоп в виде постоянного напряжения  где KупрГС - крутизна управления гиростабилизатора по оси стабилизации, [с-1⋅В-1], подаваемого на катушку датчика момента гироскопа ДМz, компенсирующее дрейф гиростабилизатора. При этом значительно уменьшается как систематическая, так и пропорционально ей случайная составляющая дрейфа, что в итоге приводит к уменьшению ошибки определения азимутального угла.
где KупрГС - крутизна управления гиростабилизатора по оси стабилизации, [с-1⋅В-1], подаваемого на катушку датчика момента гироскопа ДМz, компенсирующее дрейф гиростабилизатора. При этом значительно уменьшается как систематическая, так и пропорционально ей случайная составляющая дрейфа, что в итоге приводит к уменьшению ошибки определения азимутального угла.
4. На каждом такте ((i+1)-ом) работы:
4.1. формируют управляющее воздействие на гироскоп по стабилизированной оси так, чтобы вектор кинетического момента Н гироскопа всегда находился в плоскости горизонта. Для этого сигнал с акселерометра Ах подают через усилитель Ус3 на катушку датчика момента гироскопа ДМг в виде напряжения Uynp;
4.2. с помощью акселерометров измеряют проекции ускорения силы тяжести g на оси приборной системы координат  и дополнительно измеряют напряжение
и дополнительно измеряют напряжение  подаваемое на катушку датчика момента гироскопа ДMz с выхода акселерометра Ах через усилитель Ус3;
подаваемое на катушку датчика момента гироскопа ДMz с выхода акселерометра Ах через усилитель Ус3;
4.3. вычисляют элементы матрицы ориентации:

4.4. вычисляют угол:
 ,
,
где τ- период дискретизации,
 - прогноз величины дрейфа гиростабилизатора, поскольку ось кинетического момента гироскопа находится в плоскости горизонта, математическая модель гироскопа существенно упрощается и дрейф платформы гиростабилизатора вычисляется по формуле:
- прогноз величины дрейфа гиростабилизатора, поскольку ось кинетического момента гироскопа находится в плоскости горизонта, математическая модель гироскопа существенно упрощается и дрейф платформы гиростабилизатора вычисляется по формуле:

где ωост - остаточный (нескомпенсированный) дрейф по оси стабилизации,
wкв - масштаб квадратурной составляющей дрейфа, [c-1g-1],
 - проекция угловой скорости вращения Земли на ось стабилизации, определяемая по следующей формуле:
- проекция угловой скорости вращения Земли на ось стабилизации, определяемая по следующей формуле:

где ΩЗy=ΩЗsinϕ0 - вертикальная составляющая угловой скорости вращения Земли ΩЗ,
ΩЗx=ΩЗcosϕ0 - горизонтальная составляющая угловой скорости вращения Земли ΩЗ,
ϕ0 - широта места,
 - угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, определяемая пропорционально управляющему сигналу:
- угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, определяемая пропорционально управляющему сигналу:
где KупрГС - крутизна управления гиростабилизатора по оси стабилизации, [с-1⋅В-1];
4.5. вычисляют углы:

4.6. рассчитывают приращение матрицы ориентации ΔАi+1 по формуле (2);
4.7. формируют матрицу ориентации на текущем такте работы путем матричного произведения в виде (3);
4.8. определяют азимутальный и зенитный углы скважины, например, по формулам (4).
Таким образом, введение дополнительных операций позволяет повысить точность измерения по сравнению со способом прототипа.
Основной смысл действий по повышению точности достижении этих целей заключается в физической компенсации дрейфа гиростабилизатора и управлении гироскопом таким образом, чтобы его вектор кинетического момента (с направлением которого совпадает измерительная ось акселерометра Ах) в процессе измерения находился в горизонтальной плоскости.
Физическая компенсация дрейфа позволяет значительно уменьшить как систематическую, так и пропорциональную ей случайную составляющую дрейфа, а при стабилизации кинетического момента в горизонтальной плоскости сложная математическая модель дрейфа гироскопа, являющаяся нелинейной функцией собственной пространственной ориентации, заменяется математической моделью дрейфа гироскопа, описываемой достаточно простой функцией с постоянными параметрами, что позволяет учитывать и компенсировать дрейф гиростабилизатора, что в итоге приводит к уменьшению ошибки определения азимутального угла и повышению точность измерения.
Устройство работает следующим образом.
Работу гироскопического инклинометра можно условно разделить на два этапа: начальная выставка и автономная работа.
Начальная выставка осуществляется аналогичным образом и способом, как в прототипе. На этапе начальной выставки определяется азимутальный угол оси чувствительности гироскопа в момент окончания выставки и формируется начальное значение матрицы ориентации (1).
На этапе автономной работы скважинный прибор инклинометра непрерывно движется в скважине, при этом осуществляется измерение азимутального и зенитного углов скважины.
Существенными отличиями от прототипа являются то, что на этапе автономной работы осуществляется стабилизация вектора кинетического момента гироскопа в плоскости горизонта и то, что работа не требует остановок скважинного прибора для оценки и дальнейшей математической компенсации дрейфа: оценка дрейфа производится перед спуском прибора в скважину, при этом осуществляется не только математическая (как в прототипе), но и физическая компенсация дрейфа гиростабилизатора за счет подачи постоянного напряжения на катушку датчика момента гироскопа ДМz.
Для стабилизации вектора кинетического момента гироскопа в плоскости горизонта с выхода акселерометра Ах через дополнительный усилитель Ус3 сигнал в виде напряжения Uynp подается на катушку датчика момента гироскопа ДMz. Под действием управляющего сигнала платформа гиростабилизатора будет поворачиваться до тех пор, пока выходной сигнал акселерометра не будет равен нулю, что соответствует положению оси Хг вектора кинетического момента гироскопа в горизонтальной плоскости. Таким образом, реализуется канал стабилизации вектора кинетического момента гироскопа в плоскости горизонта.
Физическая компенсация дрейфа гиростабилизатора реализуется за счет подачи постоянного напряжения Uупр0 на катушку датчика момента гироскопа ДМz. Для осуществления физической компенсации дрейфа гиростабилизатора е устройство дополнительно введены задатчик управляющего сигнала (ЗУС) к усилитель Ус4.
Физическая компенсация дрейфа позволяет значительно снизить систематическую составляющую дрейфа, при этом пропорционально систематической составляющей уменьшается и случайная составляющая дрейфа, что обуславливает меньшую ошибку определения азимутального угла и повышение точности измерения.
Обеспеченные способом и устройством положительные эффекты позволяют повысить точность определения пространственного положения ствола протяженных наклонных скважин непрерывным гироскопическим инклинометром, тем самым устранить основной недостаток способа и устройства ближайшего аналога.
Источники информации
1. Патент РФ №2101487, Е21В 47/022, G01С 19/00, 1998 г.
2. Патент РФ №2100594, Е21В 47/02, G01C 9/00, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
Группа изобретений относится к точному приборостроению и может быть использована для обследования нефтяных и газовых скважин. Сущность изобретений заключается в том, что осуществляют формирование управляющего воздействия на гироскоп по стабилизированной оси, компенсирующее дрейф одноосного гиростабилизатора, формирование управляющего воздействия на гироскоп по стабилизированной оси для сохранения положения вектора кинетического момента в плоскости горизонта с последующим определением углов 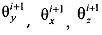 поворота. Технический результат – повышение точности определения зенитного угла и азимута скважины. 2 н.п. ф-лы, 1 ил.
поворота. Технический результат – повышение точности определения зенитного угла и азимута скважины. 2 н.п. ф-лы, 1 ил.
1. Способ определения зенитного угла и азимута скважин посредством гироскопического инклинометра, включающий измерение с помощью акселерометров ускорения силы тяжести по двум взаимно ортогональным осям, каждая из которых ортогональна продольной оси скважинного прибора гироскопического инклинометра, измерение угловой скорости по одной из названных осей посредством трехстепенного гироскопа, стабилизацию осей чувствительности акселерометров и гироскопа относительно оси, совпадающей с продольной осью скважинного прибора, посредством одноосного гиростабилизатора, измерение угла поворота корпуса скважинного прибора относительно этих осей посредством синусно-косинусного трансформатора, определение начальной ориентации осей чувствительности акселерометров в азимуте, формирование матрицы ориентации, вычисление на каждом такте работы вычислителя при движении скважинного прибора в скважине азимута и зенитного угла, например, по формулам

где i+1 - текущий шаг работы вычислителя;  - элементы матрицы ориентации Ai+1, которую формируют в виде произведения матриц
- элементы матрицы ориентации Ai+1, которую формируют в виде произведения матриц
Ai+1=ΔAi+1⋅Ai,
где А1, Ai+1 - матрицы ориентации на предыдущем и текущем шагах работы вычислителя
приращение матрицы ориентации, элементы которой определяют в зависимости от углов поворота Θx, Θy, Θz системы координат, определяемой осями чувствительности акселерометров и продольной осью скважинного прибора, относительно собственных осей, причем начальное значение матрицы ориентации равно
 ,
,
где αхв - азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки, отличающийся тем, что формируют управляющее воздействие на гироскоп по стабилизированной оси, компенсирующее дрейф одноосного гиростабилизатора, дополнительно формируют управляющее воздействие на гироскоп по стабилизированной оси так, чтобы вектор его кинетического момента находился в плоскости горизонта, и определяют угол  поворота по формуле
поворота по формуле

где τ - период дискретизации,
 - прогноз величины дрейфа гиростабилизатора, с-1;
- прогноз величины дрейфа гиростабилизатора, с-1;
 - проекция угловой скорости вращения Земли на ось стабилизации, с-1;
- проекция угловой скорости вращения Земли на ось стабилизации, с-1;
 - угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, с-1;
- угловая скорость вращения платформы гиростабилизатора, задаваемая управляющим воздействием, обеспечивающим стабилизацию вектора кинетического момента гироскопа в плоскости горизонта, с-1;
определяют углы  и
и  поворота по формулам
поворота по формулам 
где  - элементы матрицы ориентации, формируемые по результатам измерения проекций
- элементы матрицы ориентации, формируемые по результатам измерения проекций  и
и  ускорения силы тяжести.
ускорения силы тяжести.
2. Гироскопический инклинометр, содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим одноосный гиростабилизатор, на платформе которого жестко установлены два акселерометра, оси чувствительности которых взаимно перпендикулярны и ориентированы перпендикулярно оси стабилизации гиростабилизатора, совпадающей с продольной осью скважинного прибора, и трехстепенной гироскоп, по осям подвеса которого установлены датчики углов и датчики моментов, причем первый датчик угла на измерительной оси гироскопа, совпадающей с измерительной осью одного из акселерометров, подключен через усилитель контура измерения угловой скорости к второму датчику момента, по перпендикулярной к датчику угла оси, а второй датчик угла через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы датчика угла гиростабилизатора, выходы акселерометров и выход измерителя угловой скорости, а каротажный кабель соединен с выходом блока цифровой обработки, отличающийся тем, что в него введен дополнительный усилитель, к входу которого подключен акселерометр, направление оси чувствительности которого совпадает с направлением вектора кинетического момента гироскопа, а выход подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа, а также введены задатчик управляющего сигнала и дополнительный усилитель, при этом выход задатчика управляющего сигнала подключен к входу дополнительного усилителя, а выход усилителя подключен к первому датчику момента гироскопа, расположенному по измерительной оси гироскопа.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| CN 102536207 B, 26.03.2014. | |||

