Изобретение относится к измерительной технике и может быть использовано для определения ориентации объекта относительно направления плоскости географического меридиана.
Известен гирокомпас (ГК) с косвенным управлением [1], содержащий гиродвигатель, установленный внутри вертикального кольца на подшипниках, расположенных вдоль горизонтальной оси, перпендикулярной к главной оси гироскопа. Вертикальное кольцо подвешено в следящем кольце на торсионном подвесе и направляющих подшипниках. Следящее кольцо установлено в корпусе на двухосном кардановом подвесе. Центр тяжести чувствительного элемента (ЧЭ), включающего в себя гиродвигатель и вертикальное кольцо, совпадает с точкой подвеса. На камере гиродвигателя установлен плоский маятник-индикатор горизонта таким образом, что ось его чувствительности параллельна главной оси гироскопа. На внутренней и наружной осях подвеса гироскопа установлены датчики момента, на которые поступают сигналы с индикатора горизонта. По истечении времени переходного процесса главная ось гирокомпаса показывает направление плоскости географического меридиана. Таким образом, время определения направления меридиана находится в пределах периода прецессионных колебаний ГК и составляет десятки минут. Гирокомпас имеет значительные массогабаритные характеристики и энергопотребление.
Известен наземный гирокомпас с камневыми опорами [2]. Такой гирокомпас состоит из чувствительного элемента (ЧЭ) и корпуса прибора. Внутри ЧЭ установлен гиродвигатель с горизонтальной осью вращения. ЧЭ установлен в корпусе на камневых опорах, для уменьшения контактного давления на опоры ЧЭ погружен в поддерживающую жидкость, которая одновременно используется как проводник для передачи питания к гиродвигателю с электродов корпуса на соответствующие электроды ЧЭ. ЧЭ такого гирокомпаса совершает затухающиеся гармонические колебания относительно направления географического меридиана, положение которого рассчитывается по определенному алгоритму на основании съема отсчетов с ЧЭ. Сокращение времени определения направления географического меридиана гирокомпасом может быть достигнуто только путем уменьшения периода его незатухающих колебаний. Для этого необходимо уменьшать величину кинетического момента и увеличивать восстанавливающий момент гирокомпаса. Уменьшение кинетического момента приводит к резкому снижению точности ГК, увеличение восстанавливающего момента целесообразно только в определенных пределах и приводит к увеличению габаритов прибора. Кроме того, время определения направления меридиана гирокомпасом включает в себя также время разгона гиродвигателя до набора им номинальной скорости вращения. Все это ограничивает возможность сокращения времени определения направления меридиана гирокомпасом, которое может быть достигнуто порядка 10-15 минут.
Известен маятниковый гироскопический компас на торсионном подвесе [3]. Данный прибор, выбранный в качестве прототипа, предназначен для определения азимута объекта в условиях неподвижного относительно Земли основания. Гирокомпас содержит чувствительный элемент (ЧЭ), который на торсионе подвешен в корпусе как двухкоординатный физический маятник. В ЧЭ установлен гиродвигатель, ось вращения которого горизонтальна. Для устранения воздействия момента сил упругости торсиона на ЧЭ используют следящую систему, разворачивающую верхний конец торсиона вслед за поворотом гиродвигателя, в результате чего торсион остается незакрученным. Положение плоскости меридиана определяется в режиме слабо затухающих колебаний по точкам реверсии, то есть точкам предельных отклонений ЧЭ в азимуте. Недостатком такого гирокомпаса является то, что время определения направления меридиана им составляет не менее одного периода его прецессионных колебаний. Период прецессионных колебаний ГК обычно порядка 8-12 минут. Кроме того, до начала процесса измерения необходимо обеспечить разгон гиродвигателя, который составляет 0,5-2 минуты. Наличие гиродвигателя вызывает необходимость специализированного источника питания (переменный ток, частота 400 или 500, или 1000 Гц) достаточной мощности. Возможности уменьшения массогабаритных характеристик гирокомпаса также ограничены из-за присутствия гиродвигателя и необходимости обеспечения достаточной длины торсиона.
Задачей настоящего изобретения является создание измерителя, имеющего время определения направления меридиана единицы или десятки секунд.
Решение поставленной задачи достигается тем, что в измерителе направления географического меридиана, содержащем чувствительный элемент, выполненный в виде физического маятника, установленного в корпусе с помощью двухкоординатного подвеса, согласно изобретению чувствительный элемент содержит инерционное тело, связанное упругой связью с возбудителем колебаний. Двухкоординатный подвес выполнен в виде двухосного карданового подвеса, на осях которого установлены датчики угла, выходные сигналы которых поступают на вход вычислителя. Сущность устройства заключается в том, что в результате взаимодействия скорости поступательного перемещения инерционного тела с угловой скоростью вращения Земли ЧЭ будет совершать колебания вокруг своих осей подвеса. Амплитуды этих колебаний зависят от ориентации объекта относительно направления географического меридиана, которые рассчитываются вычислителем.
Признаки, отличающие предлагаемый измеритель направления географического меридиана от наиболее близкого к нему маятникового гироскопического компаса на торсионном подвесе, заключаются в наличии в ЧЭ инерционного тела, которому возбудитель колебаний, установленный в ЧЭ, сообщает поступательное движение вдоль линии отвеса. В результате взаимодействия угловой скорости вращения Земли и поступательного перемещения инерционного тела, ЧЭ совершает угловые колебания вокруг своих осей подвеса, амплитуды этих колебаний зависят от ориентации объекта относительно направления географического меридиана, что позволяет уменьшить время определения направления географического меридиана, снизить энергопотребление и массогабаритные характеристики прибора.
Время определения направления географического меридиана предлагаемым измерителем складывается из времени готовности возбудителя колебаний, времени переходного процесса в системе, времени расчета вычислителем и составляет единицы или десятки секунд.
На чертеже изображено устройство для измерения направления географического меридиана.
Измеритель направления географического меридиана (см. чертеж) содержит чувствительный элемент 1, установленный на объекте с помощью карданового подвеса, состоящего из наружного кольца 2 и внутренней крестовины 3. В ЧЭ 1 на направляющих 4 установлено инерционное тело 5, связанное с возбудителем колебаний 6 упругими элементами 7. Возбудитель 6 закреплен на корпусе ЧЭ, на осях подвеса которого установлены датчики угла 8, 9. Сигналы с датчиков угла поступают в вычислитель 10.
Измеритель направления географического меридиана работает следующим образом. В рабочем режиме возбудитель колебаний сообщает инерционному телу 5 поступательное колебательное движение вдоль линии отвеса по закону z = z0sinωt, где z - отклонение центра масс тела вдоль оси OZ в момент времени t, z0 - амплитуда колебаний центра масс тела, ω - угловая частота колебаний центра масс тела. Вместе с Землей тело 5 участвует в переносном движении со скоростью Ωη= ΩЗcosϕ, где ΩЗ - угловая скорость суточного вращения Земли, ϕ - широта места. В результате этого на тело 5 действует сила инерции  , обусловленная периодическим поворотным ускорением
, обусловленная периодическим поворотным ускорением  [4]. В общем случае оси подвеса ЧЭ не совпадают с направлением восток - запад (ось ξ), следовательно, вокруг этих осей действуют моменты
[4]. В общем случае оси подвеса ЧЭ не совпадают с направлением восток - запад (ось ξ), следовательно, вокруг этих осей действуют моменты
где m - масса ЧЭ, 1 - длина маятника, α - угол, определяющий ориентацию объекта относительно направления меридиана.
Эти моменты вызывают колебания чувствительного элемента 1 вокруг его осей подвеса, амплитуды этих колебаний зависят от ориентации объекта относительно направления меридиана (угла α). Углы колебаний ЧЭ измеряются датчиками угла 8, 9, выходные сигналы которых поступают в вычислитель 10. Вычислитель 10 рассчитывает угол α, определяющий положение объекта относительно направления географического меридиана.
В качестве примера технической реализации заявляемого устройства можно привести измеритель, в котором применен возбудитель электродинамического типа, содержащий постоянный магнит, закрепленный на корпусе ЧЭ, и катушку, связанную с инерционным телом. Катушка питается напряжением U = Uоsinωt. В качестве датчиков угла могут быть использованы бесконтактные датчики угла, например, емкостные или оптико-электронные. Сигналы с датчиков угла поступают на вычислитель, построенный на основе цифровой однокристальной микроЭВМ. В состав вычислителя также должны входить аналого-цифровые преобразователи для преобразования напряжений с датчиков угла в пропорциональный им цифровой код; блок индикации для отображения полученной информации об угле азимута.
Источники информации
1. Матвеев С.С. Гирокомпасы и гирогоризонткомпасы. - Л.: Судостроение, 1974, с. 33-38.
2. Сергеев М. А. Наземные гирокомпасы. - Л.: Машиностроение, 1969, с. 124-151.
3. Одинцов А.А. Теория и расчет гироскопических приборов. - Киев: Виша школа, 1985, c.161 - 165.
4. Авторское свидетельство N 1675671, G 01 C/00, 07.09.91.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1973 |
|
SU369395A1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Угломерное устройство для наземного гирокомпаса | 1976 |
|
SU579544A2 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| Угломерное устройство для наземного гирокомпаса | 1975 |
|
SU522413A1 |
Измеритель предназначен для определения ориентации объекта относительно направления плоскости географического меридиана. Чувствительный элемент установлен на объекте с помощью карданового подвеса, состоящего из наружного кольца и внутренней крестовины. В чувствительном элементе установлено инерционное тело, связанное упругими элементами с возбудителем колебаний. В результате взаимодействия скорости поступательного перемещения инерционного тела с угловой скоростью вращения Земли чувствительный элемент будет совершать колебания вокруг осей его подвеса. Амплитуды этих колебаний зависят от направления географического меридиана. На осях подвеса чувствительного элемента установлены датчики углов, входы которых соединены с входом вычислителя. Вычислитель рассчитывает угол, определяющий положение объекта относительно плоскости географического меридиана. Время определения ориентации объекта относительно меридиана составляет единицы или десятки секунд. Обеспечивается снижение энергопотребления и массогабаритных характеристик измерителя. 1 ил.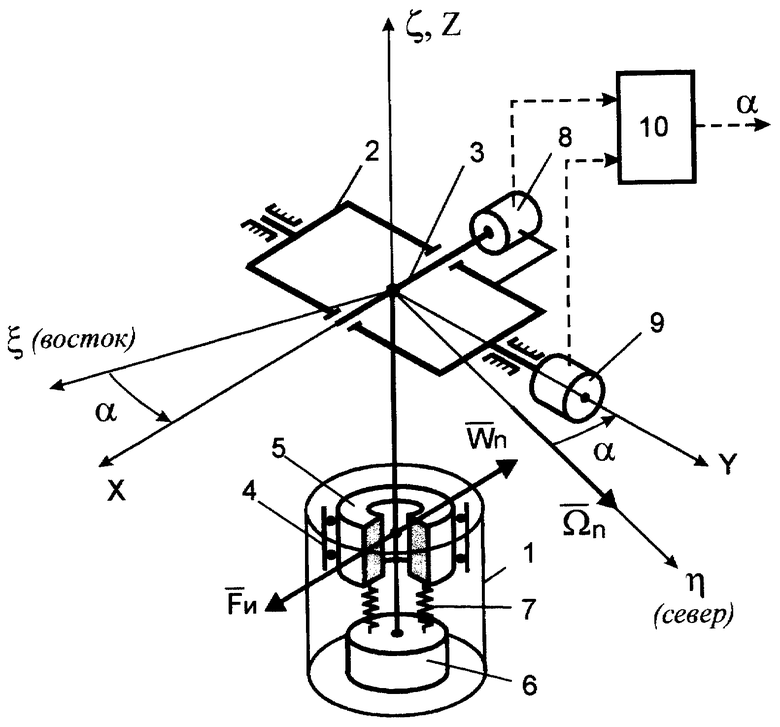
Измеритель направления географического меридиана, содержащий чувствительный элемент в виде физического маятника, установленного в корпусе с помощью двухкоординатного подвеса, отличающийся тем, что чувствительный элемент содержит инерционное тело, соединенное упругой связью с возбудителем колебаний, сообщающим инерционному телу поступательное движение вдоль линии отвеса маятника, а двухкоординатный подвес выполнен в виде карданового подвеса с установленными по его осям датчиками угла, выходы которых соединены с входом вычислителя.
| Способ ориентирования | 1989 |
|
SU1675671A1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1994 |
|
RU2084824C1 |
| US 3727177 A, 10.04.73 | |||
| ЭЛЕКТРОМАГНИТ С ФОРСИРОВКОЙ | 1992 |
|
RU2037219C1 |
