Изобретение относится к приборам и системам для определения пространственного положения оси буровых скважин, более конкретно к гироскопическим инклинометрам, способным производить измерения, в том числе, и в горизонтальных буровых скважинах.
Чаще всего гироскопический инклинометр с проводным каналом связи состоит из наземной аппаратуры и скважинного прибора, связанных каротажным кабелем. В скважинных приборах таких инклинометров используются гироскопическите датчики, различающиеся по конструкции и по виду измеряемых параметров движения. В настоящее время начали широко применяться в качестве чувствительных элементов скважинных приборов гироскопические датчики угловой скорости /1/. Замеряя при неподвижном скважинном приборе компоненты угловой скорости вращения Земли, датчики угловой скорости выдают информацию в вычислитель, где она обрабатывается по соответствующим алгоритмам совместно с информацией датчиков зенитного и апсидального углов, и в конечном итоге вычислитель определяет инклинометрические параметры данной точки скважины. Несмотря на несомненные преимущества, в частности, автономную привязку к географическому Северу, работа с таким прибором возможна только в точечном режиме измерений, который недостаточно производителен, так как каждый цикл измерений требует необходимое время для разгона ротора гироскопического датчика и его торможения после проведения измерений.
Более производительными являются инклинометры, содержащие в скважинном приборе трехстепенные гироскопы с внешней осью, направленной по продольной оси скважинного прибора. Эти гироскопические датчики могут работать при непрерывном движении скважинного прибора. Главная ось такого гироскопа сохраняет неизменным свое положение в пространстве, что дает возможность в любой момент времени по информации, снимаемой с датчика угла по внешней оси гироскопа, а также информации датчиков зенитного и апсидального углов рассчитать азимут плоскости наклонения скважины /2/. Для качественной работы такого гироскопического датчика необходимо обеспечить расположение главной оси гироскопа в горизонтальной плоскости, что достигается применением системы нивелирования главной оси. Наиболее эффективны электромеханические системы нивелирования, состоящие из маятникового чувствительного элемента, установленного по внутренней оси гироскопа, и датчика момента, установленного по внешней оси. Гироскопический инклинометр, содержащий в составе скважинного прибора трехстепенный гироскоп с подобной системой нивелирования, выбран в качестве прототипа /3/. Маятниковый чувствительный элемент выдает электрический сигнал, пропорциональный углу отклонения главной оси от плоскости горизонта; этот сигнал поступает на датчик момента, расположенный по внешней оси, который развивает момент такого знака, что гироскоп прецессирует в сторону уменьшения угла отклонения главной оси от плоскости горизонта.
Недостатком такого гироскопического инклинометра является возможность нарушения работы трехстепенного гироскопа при больших зенитных углах скважины. При неизменном положении главной оси относительно плоскости горизонта и увеличении зенитного угла скважины происходит отклонение перпендикулярного положения к плоскости внешней рамки от главной оси гироскопа. При этом происходит уменьшение эффективного значения кинетического момента гироскопа (в частности, при наклоне скважинного прибора вокруг оси, совпадающей с внутренней осью гироскопа, это уменьшение происходит по закону Ho•cosβ где b зенитный угол скважины), что заметно сказывается на точности работы прибора. При больших зенитных углах внутренняя рамка либо ложится на упоры, либо ее плоскость начинает совмещаться с плоскостью внешней рамки (происходит "сложение рамок"); в обоих случаях гироскоп теряет свойство удерживать свою главную ось неизменной в пространстве и происходит потеря информации, на основании которой рассчитывается азимут плоскости наклонения. Указанное ограничение по использованию трехстепенного гироскопа существенно снижает диапазон применения гироскопического инклинометра, так как в настоящее время парк скважин, имеющих горизонтальные участки траектории оси, возрастает.
Целью изобретения является расширение диапазона зенитных углов скважин, при которых возможно измерение азимута плоскости наклонения с помощью трехстепенного гироскопа и расширение за счет этого сферы применения гироскопического инклинометра.
Указанная цель достигается тем, что гироскопический инклинометр, состоящий из наземной аппаратуры и скважинного прибора, содержащего датчики зенитного и апсидального углов, а также трехстепенный гироскоп с маятниковой системой нивелирования, дополняется соответствующими элементами, позволяющими осуществить перемену осей чувствительности гироскопа при работе скважинного прибора при больших зенитных углах. Для этого в состав трехстепенного гироскопа вводятся датчик угла по внутренней оси, арретир внутренней рамки, переключатель режима работы датчика, момента, выключатель этого датчика момента, при этом выходы всех датчиков углов связаны с наземной аппаратурой. Сигналы, с помощью которых производятся подключения датчика момента и арретира, вырабатываются блоком управления гироскопом, который в свою очередь управляется задатчиком режимов работы гироскопа. При переключении осей чувствительности гироскопа основная информация, необходимая для определения азимута плоскости наклонения скважины, поступает с датчика угла по внутренней оси при условии, что плоскость внешней рамки гироскопа будет совмещена с вертикальной плоскостью. В таком случае изменение азимута плоскости наклонения будет фиксироваться измерением угла поворота внешней рамки гироскопа вместе с корпусом скважинного прибора относительно внутренней рамки, удерживаемой в пространстве вращающимся ротором. Эффективность замера изменения угла азимута плоскости наклонения, лежащего в горизонтальной плоскости, зависит от отклонения внутренней оси гироскопа (плоскости внешней рамки) от вертикальной плоскости, поэтому с гироскопом связана система приведения внешней рамки в вертикальную плоскость. В состав упомянутой системы входит датчик момента по внешней оси гироскопа, переключатель режимов работы датчика момента, выключатель датчика момента и арретир внутренней рамки гироскопа. Осуществление переключения режимов работы гироскопа производится по командам блока управления, который в свою очередь управляется задатчиком режима работы гироскопа. При измерении в скважине с малыми зенитными углами гироскоп использует систему нивелирования, при этом электрическая энергия от схемы питания датчика момента поступает на последний через маятниковый чувствительный элемент; при переключении на режим работы гироскопа с большими зенитными углами энергия на датчик момента также поступает с упомянутой схемы питания, но через последовательно включенные выключатель датчика момента и переключатель режимов работы датчика момента.
На чертеже дано устройство предлагаемого гироскопического инклинометра.
Скважинный прибор 1 связан с наземной аппаратурой 2 каротажным кабелем 3. Трехстепенный гироскоп 4 имеет датчик момента 5 по внешней оси, датчики угла по внешней оси 6 и по внутренней оси 7. В режиме исследования скважин с малыми зенитными углами датчик момента 5 управляется маятниковым чувствительным элементом 8, который связан со схемой питания датчика момента 9. Все операции по переключению режимов работы гироскопа осуществляются по командам блока управления 10, который в свою очередь управляется задатчиком режимов работы гироскопа 11. Командный сигнал на переключение режима работы гироскопа приходит на задатчик режимов 11 по каротажному кабелю с наземной аппаратуры 2. Задатчик режимов работы гироскопа 11 управляет также переключателем режимов работы датчика момента 12. Отключение датчика момента 5 производится по командам блока управления 10 выключателем датчика момента 13. На внешней рамке гироскопа установлен арретир 14 внутренней рамки, который по сигналу блока управления 10 осуществляет приведение главной оси гироскопа в положение, перпендикулярное плоскости внешней рамки и удержание ее в этом положении. Для определения положения плоскости внешней рамки гироскопа относительно вертикальной плоскости на блок управления 10 подается сигнал с датчика апсидального угла 15.
Гироскопический инклинометр работает следующим образом.
При малых зенитных углах с наземной аппаратуры 2 поступает соответствующий командный сигнал на задатчик режимов работы гироскопа 11. При этом последний подключает посредством переключателя режимов работы датчика момента 12 ко входу датчика момента 5 маятниковый чувствительный элемент 8. Данная схема соответствует схеме, используемой в конструкции гироскопического инклинометра прототипа. При достижении определенного значения зенитного угла движение скважинного прибора по скважине прекращается, с помощью наземной аппаратуры 2 на задатчик режимов работы гироскопа 11 подается командный сигнал с целью переключения режима работы гироскопа. Одновременно с этим в память вычислителя наземной аппаратуры заносится последнее рассчитанное значение азимута плоскости наклонения, соответствующее той точке скважины, где была подана команда на переключение режима работы гироскопа. Это значение будет исходным для определения азимута при движении скважинного прибора по участку с большим значением зенитного угла. Выходной сигнал задатчика режимов работы гироскопа 11 с помощью переключателя режимов работы датчика момента 12 отключает маятниковый чувствительный элемент 8 от датчика момента 5, при этом разрывается цепь системы нивелирования гироскопа, а датчик момента подключается к цепи, которая будет управлять им при работе в режиме больших зенитных углов. Одновременно с этим задатчик режимов работы гироскопа 11 подает сигнал на блок управления гироскопом 10. Последний включает арретир 14, который приводит главную ось в положение, перпендикулярное внешней рамке, и механически соединяет внешнюю и внутреннюю рамки гироскопа. Затем блок управления 10, управляя выключателем 13, подает напряжение на датчик момента и вырабатываемый последним момент вращает заарретированный гироскоп как обычное инерционное тело. При этом вращении с датчика угла 6 снимается сигнал, соответствующий углу относительного поворота внешней рамки гироскопа и корпуса скважинного прибора, затем этот сигнал поступает на вход блока управления 10, где сравнивается с сигналом датчика апсидального угла 15, определяющим угловое положение скважинного прибора относительно его плоскости наклонения. Как только блок управления 10 определит, что угол поворота внешней рамки гироскопа и апсидальный угол равны по величине и имеют противоположные знаки (условие, что плоскость внешней рамки совместилась с вертикальной), блок управления 10 выдает команду на отключение арретира 14, механическое сцепление внутренней и внешней рамок гироскопа прекращается (трехстепенный гироскоп восстанавливает свои свойства), вращение внешней рамки гироскопа под действием датчика момента 5 прекращается. Одновременно с этим блок управления 10 подает сигнал на выключатель датчика момента 13, который в свою очередь отключает питание датчика момента 5. В результате перечисленных выше операций получен свободный трехстепенный гироскоп, плоскость внешней рамки которого лежит в вертикальной плоскости, а главная ось находится в плоскости горизонта. Гироскопический инклинометр подготовлен для работы на участке скважины с большим зенитным углом. При движении скважинного прибора с датчика угла 7, установленного по внутренней оси гироскопа, снимается информация, с использованием которой рассчитывается значение изменения начального азимута плоскости наклонения, и которое затем алгебраически суммируется с последним. В конце цикла проведения измерений на отдельном участке скважины наземный вычислитель запоминает конечное значение азимута плоскости наклонения, которое для последующего цикла измерений будет являться начальным. При необходимости проведения замеров последующего участка скважины с наземной аппаратуры на задатчик режимов работы гироскопа 11 вновь подается соответствующий сигнал: если скважина имеет большие зенитные углы, то происходит последовательное проведение операций, описанное выше; при исследовании скважины с меньшими зенитными углами задатчик режимов работы гироскопа 11 подключает посредством переключателя режимов работы 12 к датчику момента 5 маятниковый чувствительный элемент 8.
Вариант технической реализации блока управления гироскопом - микропроцессор, входящий в состав элементов скважинного прибора и осуществляющий управление приведенной выше последовательностью операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| КОМПЛЕКС ГИРОИНКЛИНОМЕТРА | 1993 |
|
RU2057924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА ПЛОСКОСТИ НАКЛОНЕНИЯ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165524C2 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| ГИРОСКОПИЧЕСКАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 1996 |
|
RU2109137C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
Использование: в устройствах для определения пространственного положения оси буровых скважин. Сущность: гироскопический инклинометр включает наземную аппаратуру и соединенный с ней каротажным кабелем скважинный прибор, в котором установлен трехстепенный гироскоп, имеющий систему нивелирования главной оси. При больших зенитных углах производят перемену осей чувствительности гироскопа и получают информацию для определения изменения азимута плоскости наклонения посредством датчика угла, установленного по внутренней оси гироскопа. Цикл измерения в режиме больших зенитных углов осуществляют при приведении внешней рамки гироскопа в вертикальную плоскость, по информации датчиков апсидального угла и угла поворота внешней рамки с помощью арретира внутренней рамки и датчика момента, расположенного по внешней оси. Осуществление перевода гироскопа в режим работы при больших зенитных углах производят блоком управления гироскопом. Технический результат: расширение возможности работы инклинометра, содержащего в скважинном приборе трехстепенный гироскоп, в скважинах с большими зенитными углами, в том числе, в горизонтальных скважинах. 1 ил.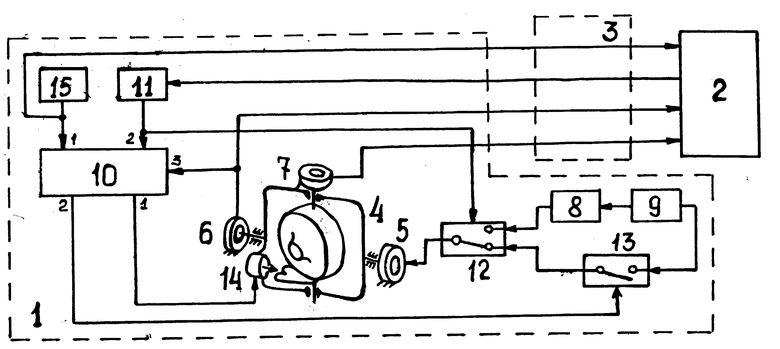
Гироскопический инклинометр, включающий наземную аппаратуру и соединенный с ней каротажным кабелем скважинный прибор, содержащий датчики зенитного и апсидального углов, трехстепенный гироскоп с маятниковым чувствительным элементом по внутренней оси и датчиками угла и момента на внешней оси, направленной по продольной оси скважинного прибора, схему питания датчика момента, при этом выходы всех датчиков углов связаны с наземной аппаратурой, отличающийся тем, что в скважинный прибор введены задатчик режимов работы гироскопа, блок управления гироскопом, выключатель датчика момента и переключатель режимов работы датчика момента, арретир внутренней рамки, причем первый, второй и третий входы блока управления соединены соответственно с выходом датчика апсидального угла, выходом задатчика и выходом датчика угла внешней оси гироскопа, а первый и второй выходы блока управления соединены соответственно с входом арретира внутренней рамки гироскопа и с управляющим входом выключателя, выход которого соединен с первым входом переключателя, а с вторым входом переключателя соединен маятниковый чувствительный элемент, вход которрого соединен с выходом схемы питания датчика момента, выход которой соединен также с входом выключателя, при этом вход датчика момента соединен с выходом переключателя, управляющий вход которого соединен с выходом задатчика, вход которого соединен с наземной аппаратурой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент, 2009418, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| - М : Недра, 1987, с.78-83 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1548423, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
