Изобретение относится к контрольно-измерительной технике и может быть использовано при вихретоковой размерометрии, а также регистрации электрофизических параметров электропроводящих протяженных объектов, например, качества контактного провода, рельсовых нитей железнодорожного транспорта при движении поезда как в нормальных, так и экстремальных условиях, например, при воздействии механических взвесей воздушного потока, песка, нефтепродуктов, а также кислотных и климатических осадков окружающей среды типа агрессивных жидкостей, дождя, снега, града и др.
Известны мобильные контрольно-вычислительные комплексы для измерения параметров верхнего строения пути, содержащие матричный вихретоковый преобразователь, закрепленный на общей жесткой базе подвижного средства, например, вагона-путеизмерителя, и схему обработки, запоминания и представления на мониторе компьютера [патент РФ N 2066645, БИ N 26, 1996].
Недостатком этого технического решения является то, что известное устройство, хотя и широко внедрено в железнодорожном транспорте, но оно не позволяет достоверно контролировать боковой износ головки рельса со стороны колеса подвижного средства, из-за того, что на результат измерения в динамике очень сильно влияют относительные смещения базы подвижного средства, к которой прикреплен матричный преобразователь, и рельса пути.
Наиболее близким техническим решением к заявляемому представляется мобильный контрольно-измерительный комплекс для измерения параметров бокового износа головки рельса, содержащий матричный вихретоковый преобразователь, жесткую технологическую базу, схему обработки, манипулятор с силовым блоком и охватом, пульт управления и устройство регистрации информации, при этом корпус преобразователя шарнирно прикреплен к базе через кронштейны и шарнирно - к охвату манипулятора через тяги [Положительное решение ФИПС о выдаче патента на изобретение по заявке N 2000123207/28].
В этом техническом решении достоверность контроля параметров бокового износа головки рельса также низкая, так как помимо информативных параметров (ширина, глубина и длина) износа матричный преобразователь воспринимает и второстепенные параметры (относительные смещения базы подвижного средства и рельса во взаимно перпендикулярных направлениям), от которых необходимо отстроиться.
Сущность изобретения заключается в том, что в мобильном комплексе, содержащем матричный вихретоковый преобразователь, жесткую базу подвижного средства, например вагона-путеизмерителя, схему обработки, входом связанную с выходом матричного преобразователя, манипулятор с силовым блоком и охватом, пульт управления, выходом соединенный с входом силового блока манипулятора, и устройство запоминания и представления информации матричного преобразователя, подключенное входом к выходу схемы обработки, при этом корпус матричного преобразователя шарнирно прикреплен к технологической базе через кронштейны и шарнирно - к охвату манипулятора через тяги, обеспечивающие установку матричного преобразователя в рабочее положение, нормальное к кривой перехода от поверхности катания головки рельса к боковой ее поверхности, обращенной к гребню колеса подвижного средства, и отвод преобразователя от поверхности контроля в сервисное положение, схема обработки снабжена вторым и третьим входами, а пульт управления снабжен вторым третьим выходами, при этом введены дополнительно второй и третий манипуляторы со схватами и силовыми блоками, соединенными своими входами со вторым и третьим выходами пульта управления, а также второй и третий вихретоковые преобразователи зазоров, связанные своими выходами с вторым и третьим входами схемы обработки и размещенные в том же поперечном сечении рельса как и первый матричный преобразователь, корпуса второго и третьего преобразователей шарнирно прикреплены к технологической базе через автономные кронштейны и шарнирно - к схватам второго и третьего манипуляторов соответственно через автономные тяги, обеспечивающие в совокупности подвод второго преобразователя в рабочее положение, нормальное к поверхности катания рельса, и подвод третьего преобразователя в рабочее положение, нормальное к боковой поверхности головки рельса, противоположной поверхности, обращенной к гребню колеса подвижного средства, и отвод второго и третьего преобразователей от контролируемых поверхностей в сервисное положение.
Техническим результатом изобретения является высокая достоверность контроля параметров бокового износа головки рельса, сопрягающейся с гребнем колеса подвижного средства, в независимости от относительного смещения в динамике рельса и технологической базы, которая фиксирует положение одновременно всех трех преобразователей, так как вертикальное смещение измеряется вторым преобразователем зазора, а горизонтальное смещение - третьим преобразователем зазора, при этом их показания учитываются в виде поправок на показаниях результата измерения первого матричного преобразователя.
На чертеже приведена структурная схема мобильного комплекса.
Он содержит матричный вихретоковый преобразователь 1, второй и третий вихретоковые преобразователи 2, 3, жесткую технологическую базу 4 подвижного средства, например вагона-путеизмерителя (на чертеже не показан), на котором установлен комплекс, схему 5 обработки, пульт 6 управления, манипуляторы 7, 8 и 9 с силовыми блоками и схватами (на чертеже не показаны), устройство 10 запоминания и представления информации матричного преобразователя 1 и контролируемое изделие 17. Корпуса матричного преобразователя 1 и второго и третьего преобразователей 2 и 3 прикреплены шарнирно к технологической базе через кронштейны 11, 12 и 13 соответственно и шарнирно - к схватам манипуляторов 7, 8 и 9, причем в исходном и сервисном положениях преобразователи 1, 2, 3 жестко фиксированы.
Выходы первого матричного преобразователя 1, второго и третьего преобразователей 2 и 3 зазоров соединены с первым, вторым и третьим входами схемы 5 обработки, выход которой соединен с входом устройства 10 запоминания и представления информации матричного преобразователя 1. Первый, второй и третий выходы пульта 6 управления связаны с входами силовых блоков манипуляторов 7, 8 и 9.
Матричный вихретоковый преобразователь 1 располагают нормально к кривой перехода от поверхности катания головки рельса 17 к боковой ее поверхности, обращенной к внутренней поверхности гребня колеса подвижного средства, т.е. перед зоной бокового износа головки рельса 17.
Исходное положение второго преобразователя 2 зазора находится нормально к поверхности катания рельса 17 на расстоянии hв, а третьего преобразователя 3 зазора - нормально к боковой поверхности головки рельса 17 на расстоянии hг, противоположной поверхности, обращенной к гребню колеса подвижного средства.
Матричный преобразователь 1 состоит из набора накладных катушек индуктивности, концентрично расположенных в герметичном корпусе преобразователя 1 и включенных в независимые колебательные контуры для увеличения их добротности, а следовательно их чувствительности, и подключен выходами к первому входу схемы 5 обработки, например через коммутатор, вход которого является первым входом схемы 5 (на чертеже не показан).
Второй и третий преобразователи 2 и 3 зазоров выполнены параметрическими, т.е. имеют по одной измерительной катушке индуктивности, которые также включены в колебательные контуры, и подключены к второму и третьему входам схемы 5 обработки.
Под заштрихованной зоной (см. чертеж) на головке рельса показана зона текущего бокового износа головки рельса, взаимодействующей с гребнем колеса подвижного средства.
Сервисное положение преобразователей 1, 2 и 3 позволяет осуществлять с ними регламентные работы и пассивное транспортирование.
Манипуляторы 7, 8 и 9 предназначены для обеспечения установления преобразователей 1, 2 и 3 в рабочее исходное положение нормально к контролируемым поверхностям головки рельса 17 и отвод их в сервисное (походное) положение через кронштейны 11-13 и тяги 14,15 и 16.
Исходное положение преобразователя 1 над кривой перехода от боковой поверхности к поверхности катания головки рельса 17 по нормали составляет не менее 15 мм, т.е. расстояние, исключающее возможные касания преобразователя 1 с элементами пути, а также рельсом при предельно-допустимых отклонениях рельса в динамике от своего заданного положения. Расстояния исходных положений преобразователей 2 и 3 над контролируемыми поверхностями составляют соответственно 10 и 15 мм.
Схема 5 обработки предназначена для анализа информации преобразователей 1, 2, 3 и ее преобразования в электрические сигналы, пропорциональные параметрам бокового износа головки рельса 17, и их передачи в устройство 10 для запоминания и воспроизведения.
Пульт 6 управления предназначен для включения и выключения действия манипуляторов 7, 8 и 9 через их силовые блоки.
В качестве жесткой базы подвижного средства может служить неподрессоренная рама подвижного средства. В качестве запоминающего и представляющего информацию устройства 10 служит компьютер с монитором.
Работа комплекса заключается в следующем.
После включения и прогрева электронной аппаратуры в процессе движения подвижного средства оператор комплекса включает через пульт 6 управления манипуляторы 7, 8 и 9 в действие, которые, в свою очередь, подводят матричный преобразователь 1, второй и третий преобразователи 2 и 3 с помощью шарнирных элементов в исходные положения нормально к контролируемым поверхностям головки рельса 17.
В исходном положении матричный преобразователь 1 регистрирует одновременно пять геометрических параметров: длину, ширину, глубину износа головки рельса, а также смещение рельса в вертикальном и горизонтальном направлениях. Так как эти смещения измеряются вторым и третьим преобразователями 2 и 3, поэтому их выходные сигналы, пропорциональные измеряемым зазорам, используются в схеме 5 обработки как компенсирующие для матричного преобразователя 1, тем самым осуществляется отстройка от возможных смещений базы и рельса
При изменениях рельефа износа в зоне перехода боковой поверхности и поверхности катания головки рельса 17 параметры выходных сигналов матричного преобразователя 1 изменяются эквивалентно по величине и времени в зависимости от длины, ширины и глубины износа и поступают на первый вход схемы 3 обработки, затем запоминаются и одновременно представляются на экране, например регистрирующего прибора. По известным значениям скорости перемещения мобильного комплекса над контролируемым объектом, длительности регистрируемого дефекта и величине выходных сигналов каждого колебательного контура матричного преобразователя 1 судят о длине, ширине и глубине износа вершины головки рельса.
После окончания работы комплекса оператор дает команду на пульт 6 управления, который ее транслирует через силовые блоки к схватам манипуляторов 7, 8 и 9, и осуществляется отвод преобразователей 1, 2 и 3 в сервисное положение.
Положительным эффектом предложенного технического решения является высокая достоверность контроля параметров бокового износа головки рельса, в результате соприкосновения ее с гребнем колеса в динамике, за счет реального учета величин зазоров между торцевой поверхностью головки рельса и поверхностью катания рельса и рационального ориентирования преобразователей над контролируемыми поверхностями, что обеспечивается введением новых технических признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ВЕРХНЕГО СТРОЕНИЯ ПУТИ | 2000 |
|
RU2180695C1 |
| БЛОК ПРОХОДНЫХ ВИХРЕТОКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ ПОТОЧНОГО КОНТРОЛЯ ТРУБ И ПРОКАТА | 2001 |
|
RU2225610C2 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ДЛИННОМЕРНЫХ ПРОВОДЯЩИХ ИЗДЕЛИЙ | 2009 |
|
RU2397486C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТРОЛОГИЧЕСКИХ ПОКАЗАТЕЛЕЙ И НАДЕЖНОСТИ МАТРИЧНОГО ВИХРЕТОКОВОГО ПРЕОБРАЗОВАТЕЛЯ В ДИНАМИЧЕСКИХ УСЛОВИЯХ ЭКСПЛУАТАЦИИ | 2004 |
|
RU2248565C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ ИЗДЕЛИЯ И ЭЛЕКТРОФИЗИЧЕСКИХ СВОЙСТВ ЕГО МАТЕРИАЛА | 2005 |
|
RU2294535C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ ПРОВОДИМОСТИ | 2008 |
|
RU2363942C1 |
| РЕНТГЕНОВСКОЕ УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ МНОГОСЛОЙНЫХ ПОКРЫТИЙ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2004 |
|
RU2253837C1 |
| РЕНТГЕНОВСКИЙ ТОЛЩИНОМЕР | 2001 |
|
RU2210059C1 |
| ВИХРЕТОКОВОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ И ПОДПОВЕРХНОСТНЫХ ТРЕЩИН В ДЕТАЛЯХ ИЗ ТОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2312333C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОЕ УСТРОЙСТВО | 2006 |
|
RU2315295C1 |
Изобретение относится к области электрификации железнодорожного транспорта, в частности к контрольно-измерительной технике для измерения параметров износа головки рельса. Мобильный контрольно-вычислительный комплекс для измерения параметров износа головки рельса содержит матричный вихретоковый преобразователь, жесткую технологическую базу подвижного средства, схему обработки, которая входом связана с выходом матричного преобразователя, манипулятор с силовым блоком и охватом, пульт управления, который выходом соединен с входом силового блока манипулятора, и устройство запоминания и представления информации матричного преобразователя, которое подключено входом к выходу схемы обработки. Корпус матричного преобразователя шарнирно прикреплен к технологической базе через кронштейны и шарнирно к схвату манипулятора через тяги. Схема обработки снабжена вторым и третьим входами, а пульт управления - вторым и третьим выходами, при этом в комплекс введены дополнительно второй и третий манипуляторы со схватами и силовыми блоками, соединенными своими входами с вторым и третьим выходами пульта управления, а также второй и третий вихретоковые преобразователи зазоров, связанные своими выходами с вторым и третьим входами схемы обработки и размещенные в том же поперечном сечении рельса как и первый матричный преобразователь. Корпус второго и третьего преобразователей зазоров шарнирно прикреплены к технологической базе через автономные кронштейны и шарнирно к схватам второго и третьего манипуляторов. Достигаемый технический результат: повышение достоверности контроля параметров бокового износа головки рельса. 1 ил.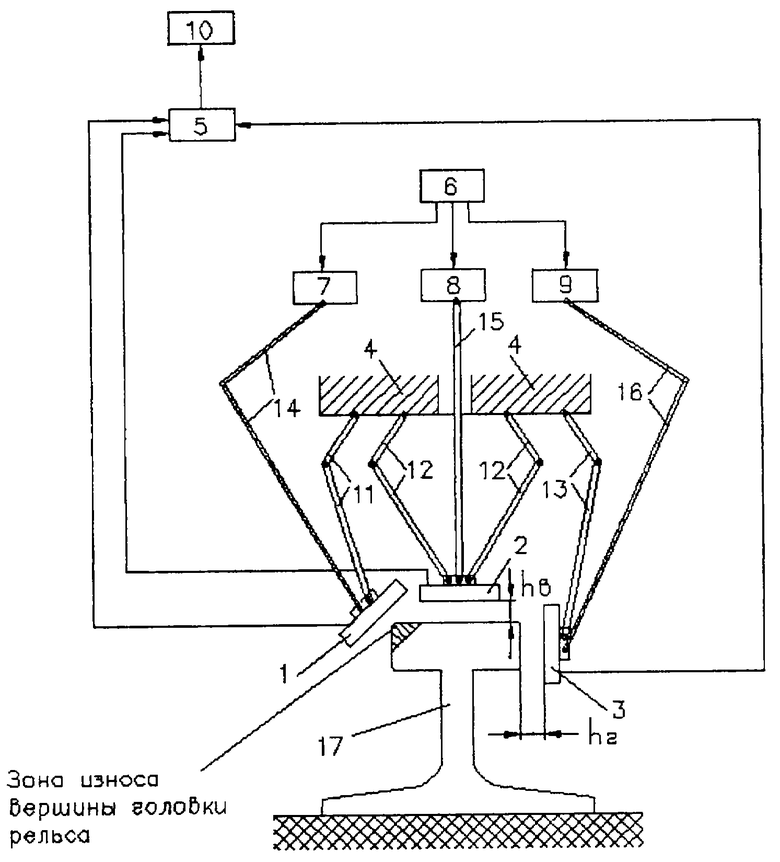
Мобильный контрольно-вычислительный комплекс для измерения параметров износа головки рельса, содержащий матричный вихретоковый преобразователь, жесткую технологическую базу подвижного средства, например вагона-путеизмерителя, схему обработки, входом связанную с выходом матричного преобразователя, манипулятор с силовым блоком и схватом, пульт управления, выходом соединенный с входом силового блока манипулятора, и устройство запоминания и представления информации матричного преобразователя, подключенное входом к выходу схемы обработки, при этом корпус матричного преобразователя шарнирно прикреплен к технологической базе через кронштейны и шарнирно к схвату манипулятора через тяги, обеспечивающие установку матричного преобразователя в рабочее положение, нормальное к кривой перехода от поверхности катания головки рельса к боковой ее поверхности, обращенной к гребню колеса подвижного средства, и отвод матричного преобразователя от контролируемой поверхности в сервисное положение, отличающийся тем, что схема обработки снабжена вторым и третьем входами, а пульт управления - вторым и третьим выходами, при этом в комплекс введены дополнительно второй и третий манипуляторы со схватами и силовыми блоками, соединенными своими входами с вторым и третьим выходами пульта управления, а также второй и третий вихретоковые преобразователи зазоров, связанные своими выходами с вторым и третьим входами схемы обработки и размещенные в том же поперечном сечении рельса что и первый матричный преобразователь, корпуса второго и третьего преобразователей зазоров шарнирно прикреплены к технологической базе через автономные кронштейны и шарнирно к схватам второго и третьего манипуляторов соответственно через автономные тяги, обеспечивающие в совокупности установку второго преобразователя в рабочее положение, нормальное к поверхности катания рельса, а третьего преобразователя в рабочее положение, нормальное к боковой наружной поверхности головки рельса, противоположной поверхности, обращенной к гребню колеса подвижного средства, и отвод второго и третьего преобразователей от контролируемых поверхностей в сервисное положение.
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Устройство для определения исправности рельсового пути | 1989 |
|
SU1796514A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ВЕРХНЕГО СТРОЕНИЯ ПУТИ | 2000 |
|
RU2180695C1 |

