Изобретение относится к области железнодорожного транспорта и предназначено для контроля и оценки состояния железнодорожных путей.
Известно устройство для определения исправности рельсового пути, в котором на исследуемый рельсовый путь с путевой машины непрерывно посылают сигнал лазерного излучателя, отраженный сигнал принимает фотоприемник, и после преобразования сигнала в значения параметров рельсового пути его сравнивают с априорно известным значением.
Данный способ определения исправности рельсового пути реализуется устройством, которое установлено на путевой машине с опорными рельсовыми тележками и содержит шарнирно закрепленные на измерительных тележках по обе стороны от нагрузочного приспособления лазерные излучатели и фотоприемник, установленный на подвижной части нагрузочного приспособления. (Авт. св. СССР N 1796514, B 61 K 9/08, 1993).
Недостатком способа и устройства его реализующего является повышенный износ измерительного оборудования и малая скорость движения путевой машины (около 40 км/ч), так как данный метод контроля состояния рельсового пути относится к контактным методам измерения, при этом измеряются только просадки рельсовых нитей (прогиб).
Известно устройство для контроля состояния рельсового пути, реализующее способ контроля, при котором производят предстартовую калибровку датчиков измерения параметров радиусов-векторов от фокусов датчиков до точек, лежащих на верхних и внутренних боковых поверхностях головок рельсов, и запоминают данные калибровки, в процессе движения вагона-путеизмерителя циклически измеряют в реальном масштабе времени текущие значения пройденного пути, текущие значения силовых факторов динамического взаимодействия подвижного состава и рельсового пути, текущие значения высоты неровностей на поверхности катания рельсов, текущие значения параметров радиусов-векторов, текущие значения углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат вагона-путеизмерителя, полученные текущие значения запоминают, вычисляют комплекс геометрических параметров рельсового пути, проводят анализ и оценку его состояния и запоминают полученные результаты.
Данный способ контроля состояния рельсового пути реализуется устройством, содержащим два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленные на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленные на неподрессоренной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленные на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, и установленный на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину (ПЭВМ). (Патент РФ N 2074829, B 61 K 9/08, E 01 B 35/00, 1997).
Способ контроля состояния рельсового пути и устройство его реализующее по патенту РФ N 2074829 по общности решаемых задач и функционально- конструктивному выполнению наиболее близки к предлагаемому изобретению и выбраны в качестве прототипа.
Недостатком известного способа контроля состояния рельсового пути и устройства его реализующего является недостаточная точность и достоверность контроля, так как измеряют только отклонения геометрических параметров рельсового пути от заданных, при этом число и вид измеряемых отклонений определяется количеством датчиков и размещением их на вагоне-путеизмерителе, а также наличие методической ошибки за счет малой жесткости вагона-путеизмерителя при контроле параметров рельсового пути с расположением датчиков на длинной базе.
Кроме того, недостатком известного способа контроля состояния рельсового пути и устройства его реализующего является синхронный съем информации с датчиков, которые по принципу своего действия являются асинхронными, вследствие чего происходит периодический набег фазовой ошибки.
Техническим результатом изобретения является создание способа контроля состояния рельсового пути и реализующего его устройства, позволяющего при движении вагона-путеизмерителя со скоростью до 250 км/ч измерить с высокой точностью и достоверностью истинные геометрические параметры пути и вычислить не только принятую в настоящее время совокупность частных производных - отклонений геометрических параметров рельсового пути от заданных - просадки, рихтовки, уровни и т.д., но и более совершенные комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава.
Сущность изобретения заключается в том, что в способе контроля состояния рельсового пути, при котором производят предстартовую калибровку датчиков измерения параметров радиусов-векторов от фокусов датчиков до точек, лежащих на верхних и внутренних боковых поверхностях головок рельсов, и запоминают данные калибровки. В процессе движения вагона-путеизмерителя циклически измеряют в реальном масштабе времени текущие значения пройденного пути, текущие значения силовых факторов динамического взаимодействия подвижного состава и рельсового пути, текущие значения высоты неровностей на поверхности катания рельсов, текущие значения параметров радиусов-векторов, текущие значения углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат вагона-путеизмерителя. Полученные текущие значения запоминают, вычисляют комплекс геометрических параметров рельсового пути, проводят анализ и оценку его состояния и запоминают полученные результаты, перед калибровкой датчиков определяют географические координаты места старта вагона-путеизмерителя по данным спутниковой навигационной системы, запоминают их совместно с априорным значением высоты места старта над уровнем моря, в процессе движения вагона-путеизмерителя регистрируют факты выдачи радиолокатором сигналов об обнаружении одного очередного из N пассивных приемоответчиков, привязывают их к текущему значению пройденного пути и запоминают, циклически измеряют в реальном времени текущие значения географических координат. После упомянутого запоминания текущих значений их экстраполируют на момент выдачи и полученные данные запоминают, каждое экстраполированное текущее значение индивидуально привязывают к текущему значению пройденного пути, при этом интервал квантования пройденного пути изменяют по критерию "точность-достоверность", а каждое экстраполированное текущее значение ускорения привязывают дополнительно к текущему значению времени. Полученные данные запоминают и обрабатывают в квазиреальном масштабе времени методами интер- и экстраполяции, преобразуя их в последовательность блоков данных, приведенных к вертикальной плоскости, которой принадлежат начало связанной системы координат рельсового пути и ось измерительной колесной пары, и привязанных к последовательности директивных отрезков пути, пройденных этой осью. Преобразуют последовательность блоков данных в последовательность блоков координат положения вагона-путеизмерителя в инерциальном пространстве, совместив начало связанной системы координат с фокусом бесплатформенной инерциальной навигационной системы, преобразуют последовательность блоков данных в последовательность блоков координат в связанной системе координат рельсового пути, определяя положение верхних и внутренних боковых поверхностей головок рельсов в пространстве.
Координаты положения в пространстве вагона-путеизмерителя и координаты верхних и внутренних боковых поверхностей головок рельсов используют для упомянутого вычисления комплекса геометрических параметров рельсового пути, при этом измерение текущих значений пройденного пути, текущих значений силовых факторов динамического взаимодействия подвижного состава и рельсового пути, текущих значений высоты неровностей на поверхности катания рельсов, параметров радиусов-векторов, углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат вагона-путеизмерителя. Проводят асинхронно по отношению друг к другу, в нереальном времени корректируют результаты измерений по данным спутниковой навигационной системы и радиолокатора.
Сущность изобретения заключается также в том, что в устройство для контроля состояния рельсового пути, содержащее два датчика вертикальных ускорений букс, установленных на корпусах букс одной из колесных пар в некотловой части вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, установленные на наружной поверхности днища вагона-путеизмерителя, два бесконтактных датчика оптического диапазона длин волн измерения ширины колеи, установленные на неподрессоренной раме колесной тележки в некотловой части вагона-путеизмерителя, два датчика вертикальных перемещений букс относительно кузова, установленные на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части, датчик пройденного пути, установленный на корпусе одной из букс измерительной колесной пары, и установленный на борту вагона-путеизмерителя контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину (ПЭВМ), введены бесплатформенная инерциальная навигационная система, установленная в некотловой части вагона-путеизмерителя, спутниковая навигационная система, радиолокатор, включающий приемопередающую станцию, установленную на борту вагона-путеизмерителя и N пассивных приемоответчиков, установленных на контрольных объектах, расположенных вдоль железнодорожного пути, а в контрольно-вычислительный комплекс введены первый и второй контроллеры, контроллер вычисления параметров пути, блок текущего времени, блок данных результатов контроля, принтер и пульт оператора.
При этом первый и второй датчики вертикальных ускорений букс подключены соответственно к первому и второму входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова подключены соответственно к третьему и четвертому входам первого контроллера, первый и второй бесконтактные датчики оптического диапазона длин волн измерения ширины колеи подключены соответственно к пятому и шестому входам первого контроллера, первый и второй датчики вертикальных перемещений букс относительно кузова подключены соответственно к седьмому и восьмому входам первого контроллера, датчик пройденного пути подключен к первому входу ПЭВМ, вход и выход бесплатформенной инерциальной навигационной системы соединены соответственно с первым выходом и с первым входом второго контроллера, второй вход и второй выход которого соединены соответственно с выходом и входом радиолокатора, спутниковая навигационная система подключена к третьему входу второго контроллера, выход блока текущего времени соединен с вторым входом ПЭВМ и с четвертым входом второго контроллера, второй выход ПЭВМ соединен с девятым входом первого контроллера и с пятым входом второго контроллера, первые входы-выходы ПЭВМ, входы-выходы первого и второго контроллеров соединены с входами-выходами контроллера вычисления параметров пути, вторые и третьи входы-выходы ПЭВМ соединены соответственно с входами-выходами блока данных результатов контроля и с входами-выходами пульта оператора, второй выход ПЭВМ подключен к принтеру.
Реализация способа пояснена на фиг. 1 - 5.
На фиг. 1 показано размещение в плане бесплатформенной инерциальной навигационной системы (БИНС) и датчиков: датчика пройденного пути (ДПП), датчиков вертикальных ускорений букс (ВУБ 1 и ВУБ 2), датчиков вертикальных и горизонтальных перемещений головок рельсов относительно кузова (РК 1 и РК 2), датчиков измерения ширины колеи (ШК 1 и ШК 2), датчиков вертикальных перемещений букс относительно кузова (БК 1 и БК 2); на фиг.2 - размещение в поперечной плоскости БИНС и датчиков РК 1 и РК 2; на фиг.3 - размещение в поперечной плоскости БИНС и датчиков БК 1, БК 2, ШК 1 и ШК 2; на фиг.4 - иллюстрация вычисления величины просадки левого рельса вагона-путеизмерителя (ВПИ) на стоянке; на фиг.5 - иллюстрация вычисления величины просадки левого рельса в движении ВПИ.
На фиг 1 - 5 обозначены: ЛР и ПРР - соответственно левый и правый рельсы; НД - направление движения ВПИ; (x,y,z) - связанная система координат ВПИ, совмещенная с фокусом БИНС; C1, C2, C4, C5 = const - расстояние между фокусом БИНС и фокусами датчиков РК и БК; C3 = const - расстояние между фокусами ШК 1 и ШК 2; R1, R2 = var - радиусы-векторы от фокуса датчика РК 1 до точек на кривых, лежащих соответственно на поверхности катания и внутренней боковой поверхности левого рельса, протяженных в направлении движения ВПИ; R3, R4 = var - радиусы-векторы от фокуса датчика РК 2 до точек на кривых, лежащих соответственно на поверхности катания и внутренней боковой поверхности правого рельса, протяженных в направлении движения ВПИ; R5, R6 = var - радиусы-векторы от фокусов соответственно датчиков ШК 1 и ШК 2 до точек на кривых, лежащих соответственно на внутренних боковых поверхностях левого и правого рельсов, протяженных в направлении движения ВПИ; R7, R8 = var - радиусы-векторы от фокусов соответственно датчиков БК 1 и БК 2 до корпусов соответственно левой и правой букс колесной пары; B - ширина колеи; (s,h,l)- связанная система координат рельсового пути; 1 - зона возможных перемещений фокуса БИНС; 2, 3- зоны возможных смещений соответственно левого и правого рельсов; 4 - траектория перемещения начала связанной системы координат рельсового пути в пространстве в процессе движения ВПИ; точка Q - проекция текущего положения фокуса БИНС на поперечную плоскость, совершающая перемещения в зоне 1 под действием внешних сил, приложенных к кузову ВПИ; точка P - проекция положения фокуса БИНС на поперечную плоскость как результат интегрирования множества векторов V2 -текущих значений величин отклонений фокуса БИНС на отрезке времени, равном или кратном периоду собственных колебаний кузова ВПИ; точка K - текущее положение конца вектора R1 из фокуса РК 1 к середине поверхности катания левого рельса; V1 = const в пределах между двумя последовательными предстартовыми калибровками, определяет положение точки P относительно начала связанной системы координат рельсового пути; V 2 - текущее значение отклонения величины фокуса БИНС; V 3 = C1 + R1 - геометрическая сумма радиусов-векторов; V 4 - радиус-вектор из точки K в точку O; O - начало связанной системы координат рельсового пути; d - величина просадки левого рельса. На фиг.6 изображена функционально-структурная схема устройства для контроля состояния рельсового пути.
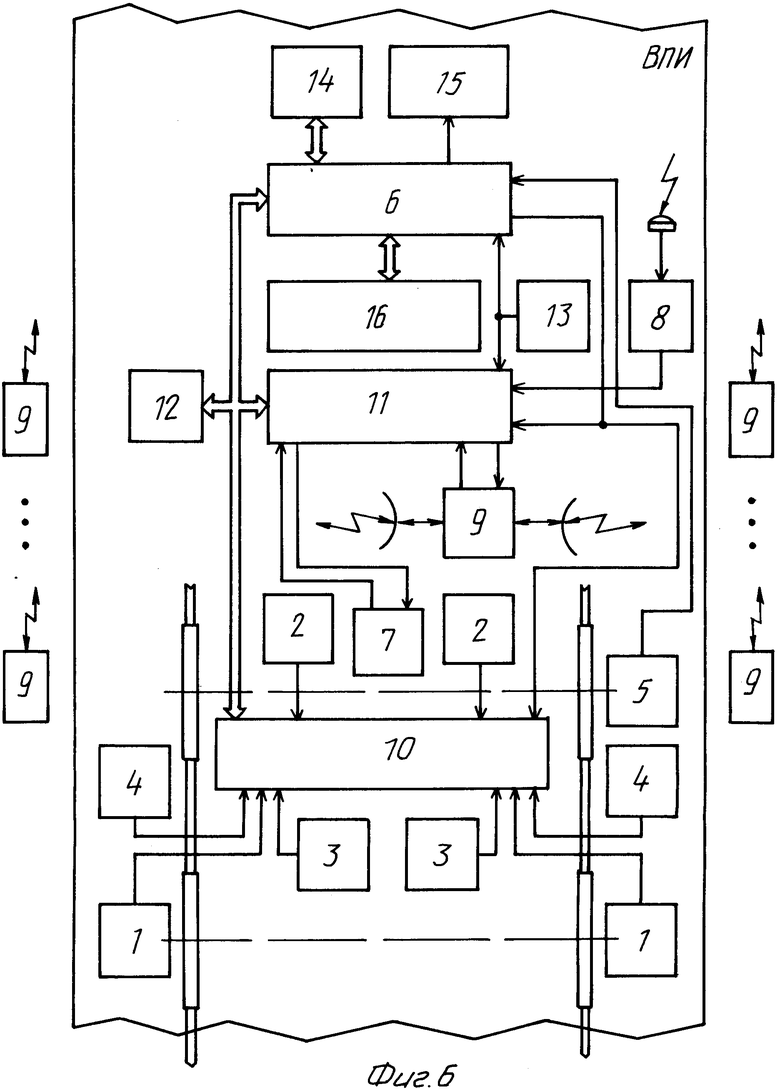
Устройство для контроля состояния рельсового пути (фиг.6) размещено на вагоне-путеизмерителе (ВПИ) и содержит два датчика 1 вертикальных ускорений букс (ВУБ), два бесконтактных датчика 2 оптического диапазона длин волн измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова (РК), два бесконтактных датчика 3 оптического диапазона длин волн измерения ширины колеи (ШК), два датчика 4 вертикальных перемещений букс относительно кузова (БК) и датчик 5 пройденного пути (ДПП), персональную электронно-вычислительную машину (ПЭВМ) б, бесплатформенную инерциальную навигационную систему (БИНС) 7, спутниковую навигационную систему (СНС) 8, радиолокатор (РЛ) 9, включающий приемопередающую станцию, установленную на борту вагона- путеизмерителя и N пассивных приемоответчиков (ПО), первый и второй контроллеры 10 и 11, контроллер 12 вычисления параметров пути (КВПП), блок 13 текущего времени (БТВ), блок 14 данных результатов контроля (БДРК), принтер 15 и пульт 16 оператора.
ПЭВМ 6, контроллеры 10 и 11, КВПП 12, БТВ 13, БДРК 14, принтер 15 и пульт 16 оператора входят в состав контрольно-вычислительного комплекса.
В устройстве для контроля состояния рельсового пути (фиг.6) два датчика 1 ВУБ установлены на корпусах букс одной из колесных пар в некотловой части ВПИ, два датчика 2 РК установлены на наружной поверхности днища ВПИ, два датчика 3 ШК установлены на неподрессоренной раме колесной тележки в некотловой части ВПИ, два датчика 4 БК и датчик 5 ДПП установлены на кузове вагона-путеизмерителя над буксами колесной пары в его некотловой части.
Контрольно-вычислительный комплекс установлен на борту ВПИ, который включает ПЭВМ 6, контроллеры 10,11, КВПП 12, БТВ 13, БДРК 14, принтер 15 и пульт 16 оператора.
Первый и второй датчики 1 ВУБ подключены соответственно к первому и второму входам первого контроллера 10, первый и второй датчики 2 РК подключены соответственно к третьему и четвертому входам контроллера 10, первый и второй датчики 3 ШК подключены соответственно к пятому и шестому входам контроллера 10, первый и второй датчики 4 БК подключены соответственно к седьмому и восьмому входам контроллера 10, датчик 5 ДПП подключен к первому входу ПЭВМ 6, вход и выход БИНС 7 соединены соответственно с первым выходом и с первым входом контроллера 11, второй вход и второй выход которого соединены соответственно с выходом и входом радиолокатора 9.
СНС 8 подключена к третьему входу контроллера 11, выход БТВ 13 соединен с вторым входом ПЭВМ 6 и с четвертым входом контроллера 11, второй выход ПЭВМ 6 соединен с девятым входом контроллера 10 и с пятым входом контроллера 11.
Первые входы-выходы ПЭВМ 6, входы-выходы контроллеров 10 и 11 соединены с входами-выходами КВПП 12, вторые и третьи входы-выходы ПЭВМ 6 соединены соответственно с входами-выходами БДРК 14 и с входами-выходами пульта 16 оператора. Второй выход ПЭВМ 6 подключен к принтеру 15.
Для осуществления предлагаемого способа контроля состояния рельсового пути необходимо произвести следующие операции в нижеуказанной последовательности:
определить географические координаты места старта ВПИ по данным СНС;
запомнить их совместно с априорным значением высоты места старта над уровнем моря;
произвести предстартовую калибровку датчиков измерения параметров радиусов-векторов от фокусов датчиков до точек, лежащих на верхних и внутренних боковых поверхностях головок рельсов;
запомнить данные калибровки;
в процессе движения вагона-путеизмерителя циклически измерить в реальном масштабе времени текущие значения пройденного пути, текущие значения силовых факторов динамического взаимодействия подвижного состава и рельсового пути, текущие значения высоты неровностей на поверхности катания рельсов, текущие значения параметров радиусов-векторов, текущие значения углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат ВПИ;
регистрировать в процессе движения ВПИ факты выдачи радиолокатором сигналов об обнаружении одного очередного из N пассивных приемоответчиков;
привязать факты выдачи сигналов к текущему значению пройденного пути;
запомнить привязанные значения;
циклически измерить в реальном времени текущие значения географических координат;
запомнить полученные текущие значения;
экстраполировать на момент выдачи текущие значения;
запомнить экстраполированные данные;
каждое экстраполированное текущее значение индивидуально привязать к текущему значению пройденного пути;
при необходимости изменить интервал квантования пройденного пути по критерию "точность-достоверность";
каждое экстраполированное текущее значение ускорения индивидуально привязать дополнительно к текущему значению времени;
запомнить привязанные текущие значения;
обработать привязанные текущие значения в квазиреальном масштабе времени методами интер- и экстраполяции, преобразуя их в последовательность блоков данных, приведенных к вертикальной плоскости, которой принадлежат начало связанной системы координат рельсового пути и ось измерительной колесной пары, и привязанных к последовательности директивных отрезков пути, пройденных этой осью;
преобразовать последовательность блоков данных в последовательность блоков координат положения ВПИ в инерциальном пространстве, совместив начало связанной системы координат с фокусом БИНС;
преобразовать последовательность блоков данных в последовательность блоков координат в связанной системе координат рельсового пути, определяя положение верхних и внутренних боковых поверхностей головок рельсов в пространстве;
вычислить комплекс геометрических параметров рельсового пути, используя полученные координаты положения в пространстве ВПИ и координаты верхних и внутренних боковых поверхностей головок рельсов;
произвести анализ состояния рельсового пути и его оценку;
запомнить полученные результаты;
в нереальном времени откорректировать результаты измерений по данным СНС и радиолокатора.
Суть предлагаемого способа контроля состояния рельсового пути - определение положения в инерциальном пространстве последовательности точек директивных, протяженных в направлении движения ВПИ кривых, принадлежащих контролируемым поверхностям головок рельсов, вычисление комплекса геометрических параметров рельсового пути, измерение силовых факторов динамического взаимодействия подвижного состава и рельсового пути, измерение высоты неровностей на поверхности катания головок рельсов, анализ и оценка состояния рельсового пути, протоколирование результатов контроля, коррекция результатов измерений в нереальном времени.
Для понимания предлагаемого способа рассмотрим взаимодействие бесплатформенной инерциальной навигационной системы (БИНС), двух датчиков измерения расстояний от некоторых фиксированных точек кузова до верхних и внутренних боковых поверхностей каждого из рельсов (РК 1, РК 2), двух акселерометров для измерения текущих значений вертикальных ускорений каждого из корпусов букс колесной пары (ВУБ 1, ВУБ 2) и контрольно-вычислительного комплекса с комплектом программного математического обеспечения.
Указанные БИНС и датчики размещаются вблизи колесных пар тележки некотловой части ВПИ, как показано на фиг.1 и 2, и имеют точностные характеристики и производительность, достаточные для осуществления поставленной задачи.
Из всех возможных систем координат выбрана комбинация из трех систем координат: географической (широта, долгота и высота над уровнем моря), связанной системы координат ВПИ, начало которой помещено в точку фокуса БИНС, и связанной системы координат рельсового пути, начало координат которой лежит на середине отрезка касательной к поверхностям катания левого и правого рельсов горизонтального идеального пути и находится в вертикальной плоскости, проходящей через ось измерительной колесной пары, а оси параллельны осям географической системы координат места. Такая комбинация систем координат является оптимальной.
Перед началом движения ВПИ определяют и запоминают географические координаты и высоту над уровнем моря места старта, уточняют и запоминают исходные калибровочные значения параметров постоянных C1, C2 (фиг.2) и переменных R1. ..R4 радиусов-векторов, связывающих фокусы приборов с контролируемыми поверхностями рельсов.
Взаимодействие БИНС и датчиков рассмотрим на примере контроля геометрии поверхности катания левого рельса (фиг.4 и 5).
Геометрическая сумма векторов V1 + V2 + V3 + V4 = 0. Если при калибровке ВПИ стоит на горизонтальном участке пути, то вектор V4 горизонтален и его проекция на вертикаль равна 0.
В процессе движения ВПИ начало "О" связанной системы координат рельсового пути перемещается по траектории 4 пути в точку "О'" (фиг.5). Если, например, в данном месте существует просадка левого рельса, то она численно равна d - проекции вектора V4 на вертикаль места.
Способ предполагает асинхронный съем информации с БИНС и датчиков с экстраполяцией текущих значений на момент выдачи и индивидуальной привязкой экстраполированных данных к текущим значениям пройденного пути и времени. Оптимизация пакетов данных и введение изменяемого в процессе вычислений интервала квантования пройденного пути обеспечивает высокую точность измерений и возможность установки датчиков, фазовые и временные характеристики которых неидентичны. Последующая привязка асинхронных данных к директивным отрезкам пройденного пути позволяет производить вычисление параметров рельсового пути и анализ его состояния в квазиреальном времени как по стандартным, так и по специальным методикам. Коррекция результатов измерений по данным СНС и радиолокатора производится в нереальном времени.
Устройство для контроля состояния рельсового пути работает следующим образом.
С пульта 16 оператора вводят в БИНС 7 через контроллер 11 географические координаты и высоту над уровнем моря места старта. Географические координаты места старта либо вычисляются СНС 8, либо берутся, как и высота над уровнем моря, из априорных данных. Получив, запомнив и обработав данные привязки к местности, БИНС 7 переходит в режим измерения.
Перед началом движения ВПИ производят предстартовую калибровку комплекса на участке рельсового пути, геометрические параметры которого известны. Калибровочные параметры запоминают.
В процессе движения датчики 1 ВУБ формируют в реальном времени сигналы, текущие значения которых пропорциональны проекции действующих ускорений в системе "поверхность катания - колесо" на вертикаль, лежащую в плоскости вращения колеса. Сигналы с выхода датчиков 1 ВУБ имеют полосу до 20 кГц, они поступают на соответствующий вход контроллера 10, где преобразуются в цифровую форму и привязываются на момент поступления к текущим значениям пройденного пути.
Пройденный путь измеряют в реальном времени с помощью датчика 5 ДПП, установленного на корпусе одной из букс измерительной колесной пары, с которой кинематически связан его входной вал. Датчик 5 ДПП формирует последовательность импульсов, частота следования которых пропорциональна скорости движения ВПИ, а также потенциальный сигнал направления движения. Сигналы с датчика 5 ДПП поступают на ПЭВМ 6, где масштабируются уменьшением частоты следования импульсов с целью оптимизации измерительно-вычислительного процесса по критерию "точность - достоверность". Далее масштабированные импульсы датчика 5 ДПП поступают на соответствующие входы контроллеров 10 и 11, которые синхронно подсчитывают число поступивших импульсов и формируют код пройденного пути с учетом направления движения.
Датчики измерения расстояний 2 РК, 3 ШК и 4 БК до соответствующих поверхностей головок рельсов циклически, асинхронно по отношению друг к другу, БИНС и ДПП, формируют в реальном времени информационные посылки с текущими значениями параметров соответствующих радиусов- векторов R1...R8 (фиг.2, 3), которые экстраполированы на момент выдачи. Частота следования посылок может достигать 1,25 кГц. Информационные посылки от датчиков измерений расстояний 2 РК, 3 ШК и 4 БК поступают на соответствующие входы контроллера 10, где каждая из посылок индивидуально привязывается к текущему значению пройденного пути и запоминается.
БИНС 7 содержит три датчика угла, выполненных в виде лазерных гироскопов, и три датчика линейных ускорений. Оси чувствительности датчиков расположены вдоль соответствующих осей связанной системы координат, начало которой является фокусом БИНС. Микроконтроллер, входящий в состав БИНС, преобразует аналоговые сигналы датчиков в цифровую форму, а так же вычисляет производные параметры.
Информация из БИНС 7 выдается в реальном времени в контроллер 11 циклически с частотой до 250 Гц в виде текущих значений вычисленных (экстраполированных) на момент выдачи навигационных параметров движения ВПИ в связанной системе координат (x, y, z): углы азимута, крена и тангажа, продольное, поперечное и нормальное ускорения вдоль соответствующих осей, широту, долготу и высоту места, скорость движения. Контроллер 11 принимает данные от БИНС 7, причем каждое принятое текущее значение привязывается на момент поступления к текущему значению пройденного пути, а текущие значения ускорений привязываются дополнительно к текущему значению времени. Текущие значения времени формируются БТВ 13, они поступают на контроллер 11 и ПЭВМ 6. Привязанные значения запоминаются.
Текущие значения географических координат (широта и долгота места) поступают от СНС 8 на контроллер 11, где привязываются на момент поступления к текущим значениям пройденного пути и времени.
Радиолокатор (РЛ) 9 в процессе движения ВПИ взаимодействует с расположенными на контрольных объектах вдоль рельсового пути пассивными приемоответчиками (ПО). При прохождении очередного ПО РЛ 9 формирует сигнал идентификации, который передается в контроллер 11, где привязывается на момент поступления к текущему значению пройденного пути.
В процессе приема данных контроллеры 10 и 11 формируют информационные пакеты данных, привязанных к текущим значениям пройденного пути и времени, которые в квазиреальном времени и произвольном порядке поступают по сети в два адреса: в ПЭВМ 6, для запоминания в БДРК 14 в качестве исходной информации, и в КВПП 12 - для последующей обработки. В пределах одного пакета данные оптимизированы (исключены повторяющиеся и маловероятные значения) и размещены в порядке поступления. ПЭВМ 6 предотвращает переполнение буферов КВПП 12, по требованию последнего уменьшая частоту следования импульсов от ДПП 5, транслируемых контроллерам 10 и 11, исключая таким образом потерю данных ценой временного понижения точности привязки к текущему значению пройденного пути. По мере освобождения буферов заданная точность привязки восстанавливается. Таким образом реализуется механизм изменения интервала квантования пройденного пути по критерию "точность-достоверность".
КВПП 12 в квазиреальном времени принимает и обрабатывает методами интер - и экстраполяции пакеты исходных данных, приводя их к последовательности блоков данных, привязанных к последовательности директивных отрезков пути (например, 0,25 м), пройденных осью измерительной колесной пары с учетом размещения относительно нее датчиков измерения расстояний 2 РК, 3 ШК и 4 БК, БИНС 7 и ВУБ 1 на кузове ВПИ.
Затем КВПП 12 в квазиреальном времени преобразует исходную директивную последовательность блоков данных в последовательность блоков координат положения ВПИ в инерциальном пространстве как последовательность блоков координат положения фокуса БИНС 7 - начала связанной системы координат (x, y, z) ВПИ.
Далее КВПП 12 в квазиреальном времени преобразует исходную директивную последовательность блоков данных и последовательность блоков координат положения ВПИ в инерциальном пространстве в последовательность блоков координат положения в инерциальном пространстве начала связанной системы координат (s, h, l) рельсового пути и координат верхних и внутренних боковых поверхностей головок рельсов в связанной системе координат рельсового пути.
По вычисленным директивным координатам положения ВПИ и рельсового пути в пространстве КВПП 12 вычисляет в квазиреальном времени комплекс геометрических параметров рельсового пути, производит анализ и оценку его состояния, а результаты передает по сети в ПЭВМ 6 для запоминания в БДРК 14 и распечатки в темпе движения ВПИ на принтере 15.
Масштабирование результатов контроля по меткам радиолокатора 9 и уточнение географических координат пути по данным СНС 8 производят на ПЭВМ 6 в нереальном времени в темпе движения ВПИ.
Устройство обеспечивает измерение геометрических параметров рельсового пути с высокой достоверностью благодаря наличию двух дублирующих друг друга групп датчиков: (РК 1+ РК 2) и (БК 1+БК 2+ШК 1+ШК 2), причем выходная информация от каждой из групп обрабатывается автономно.
Предложенный способ контроля состояния рельсового пути и устройство для его реализации позволяют измерить истинные (в пределах инструментальных погрешностей датчиков) геометрические параметры рельсового пути, имея которые можно, используя соответствующий математический аппарат, вычислить не только принятую в настоящее время совокупность частных производных - отклонений геометрических параметров рельсового пути от заданных - просадки, рихтовки, уровни и т. д. , но и более совершенные комплексные характеристики динамического взаимодействия рельсового пути и. подвижного состава.
Измерение геометрических параметров рельсового пути при движении ВПИ со скоростью до 250 км/ч позволяет производить в темпе движения анализ и оценку состояния рельсового пути, а также обосновывать планирование мероприятий по его ремонту. Вышеперечисленное обуславливает практическую применимость изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2270774C2 |
| АКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1997 |
|
RU2112252C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2094270C1 |
Изобретение относится к области железнодорожного транспорта и предназначено для контроля и оценки состояния рельсовых путей. Способ контроля состояния рельсового пути заключается в том, что определяют географические координаты места старта вагона-путеизмерителя по данным спутниковой навигационной системы и запоминают их совместно с априорным значением. В процессе движения вагона-путеизмерителя циклически и асинхронно измеряют значения пройденного пути, силовых факторов динамического взаимодействия подвижного состава и рельсового пути, высоты неровностей на поверхности катания рельсов, углов ориентации вагона-путеизмерителя в географической системе координат и ускорений в направлении осей связанной системы координат этого вагона. Устройство для контроля состояния рельсового пути размещено на вагоне-путеизмерителе и содержит датчики измерения вертикальных и горизонтальных перемещений головок рельсов относительно кузова, датчики измерения ширины колеи, датчик пройденного пути, ПЭВМ, бесплатформенную навигационную систему, спутниковую навигационную систему, радиолокатор. Реализация изобретения позволит измерить истинные геометрические параметры рельсового пути с высокой точностью и достоверностью при движении вагона-путеизмерителя со скоростью до 250 км/ч. 2 с.п.ф-лы, 6 ил.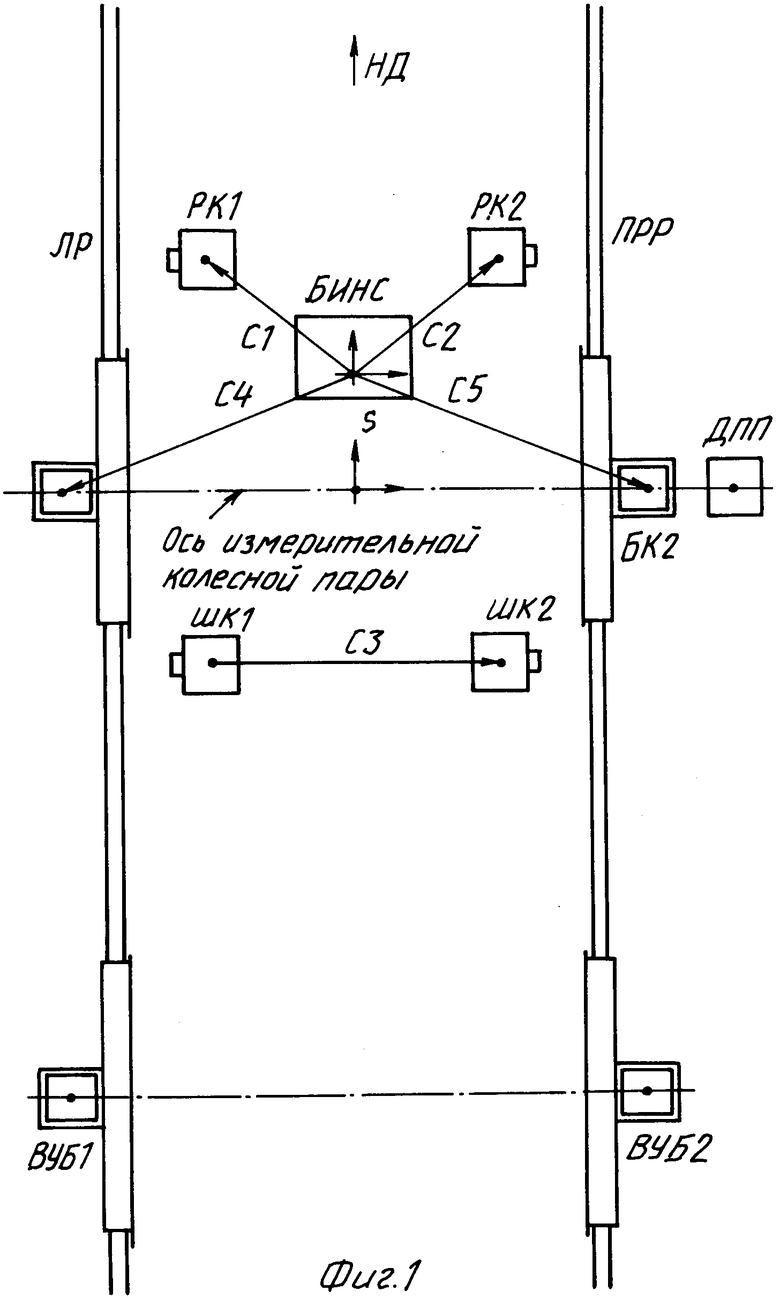
| Устройство для определения исправности рельсового пути | 1989 |
|
SU1796514A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| RU заявка 94011026 А1, 27.12.95 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1991 |
|
RU2026448C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2066646C1 |
| Устройство для контроля состояния рельсового пути | 1988 |
|
SU1671756A1 |
