Изобретение относится к системам управления с переменной структурой и предназначено для управления объектами с переменными параметрами, а именно с изменяющимся моментом инерции, приведенным к валу исполнительного электродвигателя.
Известна система с переменной структурой, содержащая последовательно соединенные измеритель рассогласования, предварительный усилитель, выпрямитель, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока, выход которого через редуктор соединен с входом измерителя рассогласования, а также релейный элемент, выход которого подключен к входу бесконтактного двигателя постоянного тока, на валу которого установлен тахогенератор, связанный через корректирующее устройство с первым входом элемента сравнения, вход которого соединен с выходом предварительного усилителя, а выход со входом релейного элемента (а.с. СССР 463097).
В известной системе с переменной структурой настраиваемые параметры постоянны. Результатом этого является или срыв скользящего процесса и возникновение перерегулирования при увеличении параметров нагрузки, или затягивание переходных процессов при уменьшении этой нагрузки (приведенных моментов инерции исполнительных двигателей), что является недостатком данной системы.
Известна также адаптивная система управления с переменной структурой (а. с. СССР 1526444, G 05 В 13/02, G 05 В 11/01, 1986), содержащая последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор и релейный элемент подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока и редуктор. Выходной вал редуктора механически соединен с объектом управления и с датчиком положения, выход которого соединен со вторым входом первого измерителя рассогласования, первый вход которого является входом системы. Система также содержит датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен со вторым входом первого сумматора. Кроме того, в системе выход релейного элемента через последовательно соединенные фильтр, второй блок определения модуля, второй измеритель рассогласования, ко второму входу которого подключен первый источник опорного напряжения, интегратор и второй сумматор, со вторым входом которого соединен выход второго источника опорного напряжения, подключен к второму входу второго блока умножения.
Данная адаптивная система управления с переменной структурой по своей технической сущности, по функциональному назначению является наиболее близкой к заявляемой адаптивной системе управления с переменной структурой.
Основным недостатком известной адаптивной системы управления с переменной структурой является избыточный расход энергии на управление, связанный с применением двуполярного управляющего сигнала на входе исполнительного двигателя.
В основу изобретения поставлена задача уменьшения расхода энергии на управление в адаптивной системе управления вследствие изменения формы управляющего сигнала.
Поставленная задача решается тем, что адаптивная система управления с переменной структурой содержит последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор, первый релейный элемент и второй сумматор подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, выход которого соединен со вторым входом первого измерителя рассогласования, датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен с вторым входом первого сумматора, фильтр, вход которого соединен с выходом второго сумматора, а выход через последовательно соединенные второй блок определения модуля, второй измеритель рассогласования, второй вход которого связан с выходом первого источника опорного напряжения, интегратор, третий сумматор, второй вход которого соединен с выходом второго источника опорного напряжения, соединен со вторым входом второго блока умножения, четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, второй вход соединен с выходом третьего источника опорного напряжения, а выход через последовательно соединенные третий блок умножения, второй вход которого соединен с выходом датчика скорости, и пятый сумматор, второй вход которого соединен с выходом первого измерителя рассогласования, второй релейный элемент соединен со вторым входом второго сумматора.
В заявленной адаптивной системе управления с переменной структурой общими существенными признаками для этой системы и для ее прототипа являются:
- первый и второй измерители рассогласования;
- первый и второй блоки определения модуля;
- первый и второй блоки умножения;
- первый сумматор;
- релейный элемент,
- первый усилитель;
- электродвигатель постоянного тока;
- редуктор;
- объект управления;
- датчик положения;
- датчик скорости;
- фильтр;
- первый и второй источники опорного напряжения.
Сопоставительный анализ заявленной адаптивной системы управления с переменной структурой и прототипа показывает, что первая имеет, в отличие от прототипа, следующие существенные отличительные признаки: четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, второй вход соединен с выходом третьего источника опорного напряжения, а выход через последовательно соединенные третий блок умножения, второй вход которого соединен с выходом датчика скорости, пятый сумматор, второй вход которого соединен с выходом первого измерителя рассогласования, и второй релейный элемент соединен с вторым входом второго сумматора.
Именно такая совокупность всех существенных признаков позволила разработать данную адаптивную систему управления с переменной структурой.
На основании изложенного можно заключить, что все существенные признаки, характеризующие заявленную адаптивную систему управления с переменной структурой, имеют причинно-следственную связь с достигнутым техническим результатом, то есть обеспечивают получение технического результата во всех случаях, на который распространяется испрашиваемый объем правовой охраны заявленной адаптивной системы управления.
Благодаря данной совокупности существенных признаков стало возможным решить поставленную задачу: снижение расхода энергии на управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2001 |
|
RU2210799C2 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2272312C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2344925C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2274884C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2004 |
|
RU2272313C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2345885C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2004 |
|
RU2272314C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2325268C1 |
Изобретение относится к системам управления с переменной структурой и предназначено для управления объектами с переменными параметрами, а именно с изменяющимся моментом инерции, приведенным к валу исполнительного электродвигателя. Техническим результатом является уменьшение расхода энергии на управление в адаптивной системе управления с переменной структурой. Адаптивная система управления с переменной структурой содержит измерители рассогласования, блоки определения модуля, блоки умножения, сумматоры, релейные элементы, усилитель, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, источники опорного напряжения. Адаптивная система управления содержит также датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен с вторым входом первого сумматора, фильтр, вход которого соединен с выходом второго сумматора, а выход через последовательно соединенные второй блок определения модуля, второй измеритель рассогласования, второй вход которого связан с выходом первого источника опорного напряжения, интегратор, третий сумматор, второй вход которого соединен с выходом второго источника опорного напряжения, соединен с вторым входом второго блока умножения. Адаптивная система управления содержит также четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, второй вход соединен с выходом третьего источника опорного напряжения, а выход через последовательно соединенные третий блок умножения, второй вход которого соединен с выходом датчика скорости, пятый сумматор, второй вход которого соединен с выходом первого измерителя рассогласования, и второй релейный элемент соединен со вторым входом второго сумматора. 2 ил.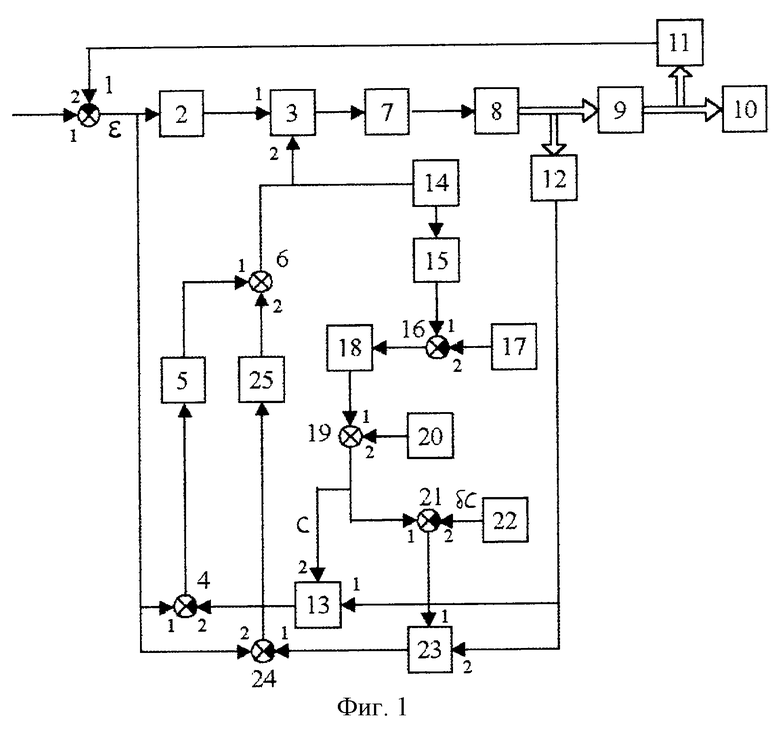
Адаптивная система управления с переменной структурой, содержащая последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор, первый релейный элемент и второй сумматор подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, выход которого соединен с вторым входом первого измерителя рассогласования, датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен с вторым входом первого сумматора, фильтр, вход которого соединен с выходом второго сумматора, а выход через последовательно соединенные второй блок определения модуля, второй измеритель рассогласования, второй вход которого связан с выходом первого источника опорного напряжения, интегратор, третий сумматор, второй вход которого соединен с выходом второго источника опорного напряжения, соединен со вторым входом второго блока умножения, отличающаяся тем, что в нее дополнительно введены четвертый сумматор, третий источник опорного напряжения, третий блок умножения, пятый сумматор, второй релейный элемент, при этом первый вход четвертого сумматора соединен с выходом третьего сумматора, второй вход соединен с выходом третьего источника опорного напряжения, а выход через последовательно соединенные третий блок умножения, второй вход которого соединен с выходом датчика скорости, пятый сумматор, второй вход которого соединен с выходом первого измерителя рассогласования, и второй релейный элемент соединен со вторым входом второго сумматора.
| SU 1526444 A1, 20.06.1996 | |||
| RU 2071105 C1, 27.12.1996 | |||
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| SU 1614682 A1, 10.12.1996 | |||
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| US 4007412 A, 08.02.1977 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

