Изобретение относится к области систем автоматического управления, в частности, к системам управления положением инерционных объектов, установленных на самоходном шасси, и может быть использовано в приводах наведения радиолокаторов, мобильных робототехнических комплексов и самоходных артиллерийских орудий.
Известны системы [1, 2]. Их недостатками являются низкие быстро действие и качество переходного процесса. Это объясняется тем, что в известных устройствах при разгоне и торможении двигателя в процессе отработки рассогласования возникают рывки, которые при большой массе объекта управления приводят к раскачке шасси и, как следствие, к увеличению продолжительности и ухудшению качества переходного процесса.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система с переменной структурой [3], принятая за прототип. Она содержит последовательно соединенные задатчик, измеритель рассогласования, первый детектор, усилитель, блок умножения, усилитель мощности и электродвигатель, электрический выход которого соединен с входом датчика тока, а вал - с валом датчика скорости и входным валом редуктора, выходной вал которого связан с входом объекта управления и датчика положения, подключенного выходом к второму входу измерителя рассогласования, соединенного выходом с первым входом первого сумматора, подключенного выходом через первый релейный блок к второму входу блока умножения, второй релейный блок, соединенный входом с выходом датчика скорости и с первым входом второго сумматора, а выходом - с вторым входом второго сумматора, подключенного выходом к первому входу третьего сумматора, соединенного вторым входом с выходом датчика тока, а выходом - с входом интегратора, второй детектор, соединенный входом с выходом второго сумматора, а выходом - с вторым информационным входом усилителя, причем выход интегратора соединен с вторым входом первого сумматора.
Недостатком этого устройства является то, что в начале отработки рассогласования и при подходе к согласованному положению возникают резкие изменения момента двигателя, которые приводят к рывку объекта управления. При большой массе объекта управления его рывки приводят к колебаниям шасси и, как следствие, к увеличению времени и ухудшению качества переходного процесса.
Изобретение направлено на повышение быстродействия и улучшение качества переходного процесса.
Сущность изобретения заключается в следующем. Наведение инерционных объектов, размещаемых на самоходном шасси, осуществляется приводами, замкнутыми по положению объекта в инерциальной системе координат. Для сокращения времени переходного процесса при отработке рассогласований в известных устройствах стремятся обеспечить быстрый разгон и быстрое торможение объекта управления при подходе к согласованному положению. Однако при большой массе объекта управления быстрые разгоны и торможения вызывают раскачку шасси. В силу своей специфики приводы наведения, предназначенные для работы во время стоянки самоходного комплекса, не способны отработать качку шасси с высокой точностью, что в результате приводит к существенному увеличению времени переходного процесса. Таким образом, повысить быстродействие и улучшить качество переходного процесса можно путем введения в систему управления корректирующих устройств, обеспечивающих плавные разгоны и торможения объекта управления за счет ограничения скорости изменения момента двигателя. С другой стороны, ограничение скорости нарастания момента двигателя не должно приводить к заметному увеличению времени, затрачиваемого на преодоление статического момента нагрузки при отработке малых начальных рассогласований.
Указанный технический результат при осуществлении изобретения достигается тем, что
Вариант 1 в систему управления инерционным объектом, содержащую задатчик, измеритель рассогласования, первый вход которого соединен с выходом задатчика, интегратор, первый сумматор, второй сумматор и последовательно соединенные усилитель мощности и двигатель, механически связанный с входом датчика скорости и входом объекта управления, механически связанного с входом датчика положения, подключенного выходом к второму входу измерителя рассогласования, включены
нелинейное корректирующее звено, вход которого соединен с выходом измерителя рассогласования, а выход - с первым входом первого сумматора, второй вход которого подключен к выходу датчика скорости, логический блок, вход которого соединен с выходом измерителя рассогласования, блок усиления с переменным коэффициентом передачи, информационный вход которого соединен с выходом первого сумматора, управляющий вход - с выходом логического блока, а выход подключен к входу интегратора, и масштабный усилитель, вход которого подключен к выходу блока усиления с переменным коэффициентом передачи, а выход - к первому входу второго сумматора, вторым входом соединенного с выходом интегратора, а выходом - с входом усилителя мощности.
Вариант 2 в систему управления инерционным объектом, содержащую задатчик, измеритель рассогласования, первый вход которого соединен с выходом задатчика, интегратор, первый сумматор, второй сумматор и последовательно соединенные усилитель мощности и двигатель, механически связанный с входом датчика скорости и входом объекта управления, механически связанного с входом датчика положения, подключенного выходом к второму входу измерителя рассогласования, включены
нелинейное корректирующее звено, вход которого соединен с выходом измерителя рассогласования, а выход - с первым входом первого сумматора, второй вход которого подключен к выходу датчика скорости, логический блок, первый вход которого соединен с выходом измерителя рассогласования, а второй вход подключен к выходу датчика скорости, блок усиления с переменным коэффициентом передачи, информационный вход которого соединен с выходом первого сумматора, управляющий вход - с выходом логического блока, а выход подключен к входу интегратора, и масштабный усилитель, вход которого подключен к выходу первого сумматора, а выход - к первому входу второго сумматора, вторым входом соединенного с выходом интегратора, а выходом - с входом усилителя мощности.
В заявленном устройстве плавное торможение объекта управления при подходе к согласованному положению обеспечивается нелинейным корректирующим звеном с переменной крутизной, выходной сигнал которого отрабатывается контуром регулирования скорости привода, содержащим интегратор, с высокой степенью точности. Для выполнения данной функции нелинейное корректирующее звено имеет большую крутизну в области малых рассогласований, уменьшающуюся по мере увеличения абсолютного значения рассогласования. Масштабный усилитель включается параллельно интегратору для повышения запасов устойчивости контура регулирования скорости привода и тем самым способствует улучшению качества переходного процесса. За счет включения интегратора в контур управления скоростью привода обеспечивается также плавность нарастания момента двигателя в начале отработки рассогласования и, как следствие, плавность разгона объекта управления. Блок усиления с переменным коэффициентом передачи позволяет совместить плавный разгон объекта управления при отработке больших рассогласований с отсутствием длительной задержки на преодоление статического момента нагрузки при отработке малых начальных рассогласований. Управление изменением коэффициента передачи производится логическим блоком по сигналу рассогласования в первом варианте и сигналам рассогласования и скорости привода во втором варианте. Таким образом, совокупность перечисленных элементов, соединенных описанным выше способом, обеспечивает плавные разгон и торможение объекта управления в переходном процессе, что исключает раскачку шасси, и вследствие этого позволяет повысить быстродействие и качество переходного процесса.
На фиг. 1 и 2 изображено заявляемое устройство (соответственно первый и второй варианты).
Система управления инерционным объектом по первому варианту (фиг. 1) содержит последовательно соединенные задатчик 1, измеритель рассогласования 2, нелинейное корректирующее звено 3, первый сумматор 4, блок усиления с переменным коэффициентом передачи 5, соединенный с входами интегратора 6 и масштабного усилителя 7, второй сумматор 8, первый и второй входы которого соединены соответственно с выходом интегратора 6 и выходом масштабного усилителя 7, усилитель мощности 9, двигатель 10 и объект управления 11. Вход логического блока 12 подключен к выходу измерителя рассогласования 2. Двигатель 10 механически связан с датчиком скорости 13. Объект управления 11 механически связан с входом датчика положения 14, выход которого соединен с вторым входом измерителя рассогласования 2. Выход логического блока 12 соединен с управляющим входом блока усиления с переменным коэффициентом передачи 5. Второй вход первого сумматора 4 соединен с выходом датчика скорости 13.
Система управления инерционным объектом по второму варианту (фиг. 2) содержит последовательно соединенные задатчик 1, измеритель рассогласования 2, нелинейное корректирующее звено 3, первый сумматор 4, блок усиления с переменным коэффициентом передачи 5, интегратор 6, масштабный усилитель 7, вход которого соединен с выходом первого сумматора 4, второй сумматор 8, первый и второй входы которого соединены соответственно с выходом интегратора 6 и выходом масштабного усилителя 7, усилитель мощности 9, двигатель 10 и объект управления 11. Входы логического блока 12 подключены к выходу измерителя рассогласования 2 и выходу датчика скорости 13, механически связанного с двигателем 10. Объект управления 11 механически связан с входом датчика положения 14. Выход датчика положения 14 подключен к второму входу измерителя рассогласования 2. Выход логического блока 12 соединен с управляющим входом блока усиления с переменным коэффициентом передачи 5. Второй вход первого сумматора 4 соединен с выходом датчика скорости 13.
Система управления инерционным объектом по первому варианту (фиг. 1) работает следующим образом.
Задатчик 1 формирует ступенчатое входное воздействие. Измеритель рассогласования 2 по сигналу входного воздействия и сигналу датчика положения 14 вырабатывает сигнал рассогласования, который поступает на входы нелинейного корректирующего звена 3 и логического блока 12. При отработке малого рассогласования, не превышающего 0,5-1o, логический блок 12 выдает команду на блок усиления с переменным коэффициентом передачи 5 на установку увеличенного коэффициента передачи по информационному входу, что обеспечивает малую задержку на преодоление статического нагрузочного момента и за счет этого быструю отработку рассогласования.
При отработке большого рассогласования (больше 0,5-1o) логический блок 12 выдает команду на блок усиления с переменным коэффициентом передачи 5 на установку малого коэффициента передачи. При этом на вход усилителя мощности 9 через сумматор 8 поступают сигналы с выходов масштабного усилителя 7 и интегратора 6. В рабочих режимах максимальный сигнал с выхода масштабного усилителя 7 составляет не более 10-20% от максимального входного сигнала усилителя мощности 8 и не вызывает рывка объекта управления 11, способного привести к колебаниям шасси. Поэтому скорость нарастания сигнала на входе усилителя мощности 8 ограничена малым значением коэффициента передачи блока усиления 5, что обеспечивает плавный разгон объекта управления 11.
При подходе к согласованному положению производится торможение объекта управления. Форма переходного процесса при торможении определяется статической характеристикой нелинейного корректирующего звена 3, обеспечивающей плавное торможение объекта управления 11 без раскачки шасси. При уменьшении величины рассогласования до 0,5-1o логический блок 12 выдает команду на блок усиления с переменным коэффициентом передачи 5 на установление увеличенного коэффициента передачи. Однако, поскольку в этот момент времени сигнал на выходе первого сумматора 4 имеет малое значение, то увеличение коэффициента передачи блока усиления 5 практически не оказывает влияния на динамику подхода системы к согласованному положению.
Система управления инерционным объектом по второму варианту (фиг. 2) работает следующим образом.
Задатчик 1 формирует ступенчатое входное воздействие. Измеритель рассогласования 2 по сигналу входного воздействия и сигналу датчика положения 14 вырабатывает сигнал рассогласования, который поступает на входы нелинейного корректирующего звена 3 и логического блока 12. Логический блок 12 анализирует величину и знак сигнала рассогласования, а также величину и знак сигнала на выходе датчика скорости 13. Если объект управления неподвижен или движется в направлении удаления от согласованного положения, о чем свидетельствуют противоположные знаки сигнала рассогласования и сигнала на выходе датчика скорости 13, то логический блок 12 выдает команду на установку увеличенного коэффициента передачи блока усиления с переменным коэффициентом передачи 5. При этом происходят ускоренное нарастание сигнала на входе усилителя мощности 9 и быстрое нарастание момента двигателя 10 до величины, достаточной для преодоления статического момента нагрузки. При преодолении нагрузочного момента объект управления 11 начинает движение к согласованному положению. Логический блок 12 выдает команду на установку малого коэффициента передачи блока усиления 5, что обеспечивает ограничение скорости дальнейшего нарастания момента двигателя 10 и плавный разгон объекта управления 11. Плавное торможение объекта управления 11 при подходе к согласованному положению производится аналогично первому варианту.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации нелинейного корректирующего звена с переменной крутизной, блока усиления с переменным коэффициентом передачи и логического блока. Предлагаемое изобретение экспериментально проверено в реально действующей системе управления инерционным объектом, установленным на самоходном колесном шасси.
Список литературы
1. Патент РФ N 2071164 от 22.06.92, МПК6 H 02 P 5/06, G 05 В 11/16.
2. Заявка на изобретение РФ N 95114272/07 от 08.08.95, МПК6 H 02 P 5/06.
3. А.С. СССР N 1487686 от 07.12.87, МПК6 G 05 В 13/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГРЕБЕНЧАТЫМ ДВИГАТЕЛЕМ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2282150C1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2005 |
|
RU2282152C1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |

Изобретение относится к области систем автоматического управления, в частности к системам управления положением инерционных объектов, установленных на самоходном шасси. Технический результат заключается в повышении быстродействия и улучшении качества переходного процесса и достигается в предлагаемой системе управления инерционным объектом включением в контур регулирования положения объекта управления нелинейного корректирующего звена с переменной крутизной и введением в контур регулирования скорости двигателя блока усиления с переменным коэффициентом передачи, включенного последовательно с соединенными параллельно интегратором и масштабным усилителем. Управление изменением коэффициента передачи блока усиления осуществляется логическим блоком, выполняющим анализ сигналов рассогласования и скорости двигателя. 2 с.п. ф-лы, 2 ил.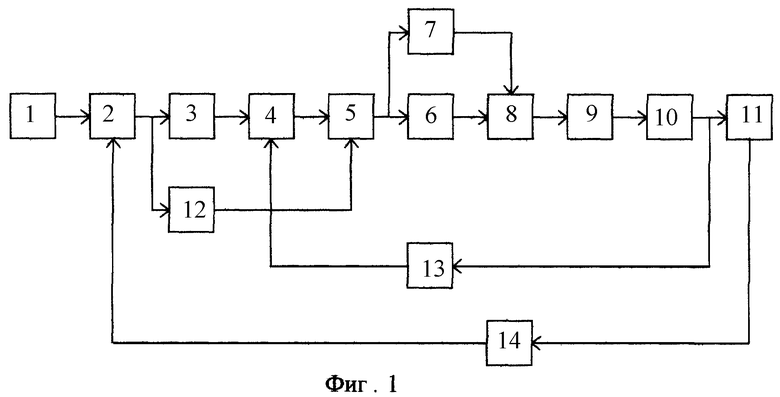
| SU 1487686 A1, 10.06.1996 | |||
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU292139A1 |
| ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2110882C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| RU 2071164 С1, 27.12.1996 | |||
| US 4007412 A, 08.02.1977. | |||

