Изобретение относится к системам управления с переменной структурой и предназначено для управления объектами с переменными параметрами, а именно с изменяющимся моментом инерции, приведенным к валу исполнительного электродвигателя.
Известна система с переменной структурой, содержащая последовательно соединенные измеритель рассогласования, предварительный усилитель, выпрямитель, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока, выход которого через редуктор соединен с входом измерителя рассогласования, а также релейный элемент, выход которого подключен к входу бесконтактного двигателя постоянного тока, на валу которого установлен тахогенератор, связанный через корректирующее устройство с первым входом элемента сравнения, вход которого соединен с выходом предварительного усилителя, а выход - со входом релейного элемента (а.с. СССР 463097).
В известной системе с переменной структурой настраиваемые параметры постоянны. Результатом этого является или срыв скользящего процесса и возникновение перерегулирования при увеличении параметров нагрузки, или затягивание переходных процессов при уменьшении этой нагрузки (приведенных моментов инерции исполнительных двигателей), что является недостатком данной системы.
Известна также адаптивная система управления с переменной структурой (а. с. 1526444, G 05 В 13/02, G 05 В 11/01, 1986), содержащая последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор и релейный элемент подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока и редуктор. Выходной вал редуктора механически соединен с объектом управления и с датчиком положением, выход которого соединен со вторым входом первого измерителя рассогласования, первый вход которого является входом системы. Система также содержит датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен со вторым входом первого сумматора. Кроме того, в системе выход релейного элемента через последовательно соединенные фильтр, второй блок определения модуля, второй измеритель рассогласования, ко второму входу которого подключен первый источник опорного напряжения, интегратор и второй сумматор, со вторым входом которого соединен выход второго источника опорного напряжения, подключен к второму входу второго блока умножения.
Данная адаптивная система управления с переменной структурой по своей технической сущности, по функциональному назначению является наиболее близкой к заявляемой адаптивной системе управления.
Основным недостатком известной адаптивной системы управления с переменной структурой является избыточный расход энергии на управление, связанный с применением двуполярного управляющего сигнала на входе исполнительного двигателя.
В основу изобретения поставлена задача уменьшения расхода энергии на управление в адаптивной системе управления с переменной структурой вследствие изменения формы управляющего сигнала.
Поставленная задача решается тем, что адаптивная система управления с переменной структурой содержит последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор, первый релейный элемент и второй сумматор подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, выход которого соединен со вторым входом первого измерителя рассогласования, датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен со вторым входом первого сумматора, фильтр, вход которого соединен с выходом второго сумматора, а выход через последовательно соединенные второй блок определения модуля, второй измеритель рассогласования, второй вход которого связан с выходом первого источника опорного напряжения, интегратор, третий сумматор, второй вход которого соединен с выходом второго источника опорного напряжения, соединен со вторым входом второго блока умножения, выход которого соединен со вторым входом первого сумматора, второй усилитель, вход которого соединен с выходом датчика скорости, а выход через последовательно соединенные четвертый сумматор, второй вход которого соединен с выходом первого сумматора, и второй релейный элемент соединен со вторым входом второго сумматора.
В заявленной адаптивной системе управления с переменной структурой общими существенными признаками для этой системы и для ее прототипа являются:
- первый и второй измерители рассогласования;
- первый и второй блоки определения модуля;
- первый и второй блоки умножения;
- первый сумматор;
- релейный элемент;
- первый усилитель;
- электродвигатель постоянного тока;
- редуктор;
- объект управления;
- датчик положения;
- датчик скорости;
- фильтр;
- первый и второй источники опорного напряжения.
Сопоставительный анализ заявленной адаптивной системы управления с переменной структурой и прототипа показывает, что первая имеет в отличие от прототипа следующие существенные отличительные признаки: второй усилитель, вход которого соединен с выходом датчика скорости, а выход через последовательно соединенные четвертый сумматор, второй вход которого связан с выходом первого сумматора, и второй релейный элемент соединен с вторым входом второго сумматора.
Именно такая совокупность всех существенных признаков позволила разработать данную адаптивную систему управления с переменной структурой.
На основании изложенного можно заключить, что все существенные признаки, характеризующие заявленную адаптивную систему управления с переменной структурой, имеют причинно-следственную связь с достигнутым техническим результатом, то есть обеспечивают получение технического результата во всех случаях, на который распространяется испрашиваемый объем правовой охраны заявленной адаптивной системы управления с переменной структурой. Благодаря данной совокупности существенных признаков стало возможным решить поставленную задачу.
Следовательно, заявленная адаптивная система управления с переменной структурой является новой и обладает изобретательским уровнем, то есть она явным образом не следует из уровня техники и пригодна для промышленного применения.
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена структурная схема адаптивной системы управления с переменной структурой; на фиг. 2 - фазовый портрет адаптивной системы управления с переменной структурой.
Адаптивная система управления с переменной структурой содержит последовательно соединенные первый измеритель рассогласования 1, первый блок определения модуля 2, первый блок умножения 3, ко второму входу которого через последовательно соединенные первый сумматор 4, первый релейный элемент 5 и второй сумматор 6 подключен выход первого измерителя рассогласования 1, первый усилитель 7, электродвигатель постоянного тока 8, редуктор 9, выходной вал которого механически соединен с входами объекта управления 10 и датчика положения 11, выход которого соединен с вторым входом первого измерителя рассогласования 1. Адаптивная система управления с переменной структурой содержит также датчик скорости 12, вход которого механически соединен с валом электродвигателя 8, а выход через второй блок умножения 13 соединен с вторым входом первого сумматора 4, фильтр 14, вход которого соединен с выходом второго сумматора 6, а выход через последовательно соединенные второй блок определения модуля 15, второй измеритель рассогласования 16, второй вход которого связан с выходом первого источника опорного напряжения 17, интегратор 18, третий сумматор 19, второй вход которого соединен с выходом второго источника опорного напряжения 20, соединен с вторым входом второго блока умножения 13. Адаптивная система управления с переменной структурой также содержит второй усилитель 21, вход которого соединен с выходом датчика скорости 12, а выход через последовательно соединенные четвертый сумматор 22, второй вход которого связан с выходом первого сумматора 4, и второй релейный элемент 23 соединен с вторым входом второго сумматора 6.
Адаптивная система управления с переменной структурой работает следующим образом. После подачи на ее вход задающего воздействия выходной сигнал первого измерителя рассогласования 1 через первый блок 2 определения модуля, первый блок 3 умножения (в котором выполняется умножение на +2, 0 или -2 в зависимости от входного сигнала первого релейного элемента 5 и входного сигнала второго релейного элемента 23) и усилитель 7 подается на электродвигатель 8. Его выходной вал начинает разгоняться, отрабатывая возникшее рассогласование ε (положение Е>0 на фиг.2). Этому состоянию соответствует участок фазовой траектории 1-2 на фиг.2. С датчика скорости 12 сигнал, который в режиме свободных движений пропорционален  через второй блок умножения 13 поступает на второй (инвертирующий) вход первого сумматора 4. Тот же сигнал с датчика скорости 12 через второй усилитель 21 поступает на первый (инвертирующий) вход четвертого сумматора 22. При скачкообразном задающем сигнале или отработке ненулевых начальных условий в системе, а также при соответствующем выборе коэффициентов передачи по второму входу первого сумматора 4 на выходе последнего и на входе первого релейного элемента 5 формируется первый сигнал переключения
через второй блок умножения 13 поступает на второй (инвертирующий) вход первого сумматора 4. Тот же сигнал с датчика скорости 12 через второй усилитель 21 поступает на первый (инвертирующий) вход четвертого сумматора 22. При скачкообразном задающем сигнале или отработке ненулевых начальных условий в системе, а также при соответствующем выборе коэффициентов передачи по второму входу первого сумматора 4 на выходе последнего и на входе первого релейного элемента 5 формируется первый сигнал переключения
где с - величина сигнала на выходе третьего сумматора 19. Соответственно, на входе второго релейного элемента 23 формируется второй сигнал переключения
где δc - коэффициент усиления второго усилителя 21. На второй вход первого блока умножения 3 с выхода второго сумматора 6 поступает сигнал в виде суммы знаков S1 и S2:
E=sing(S1)+sing(S2). (3)
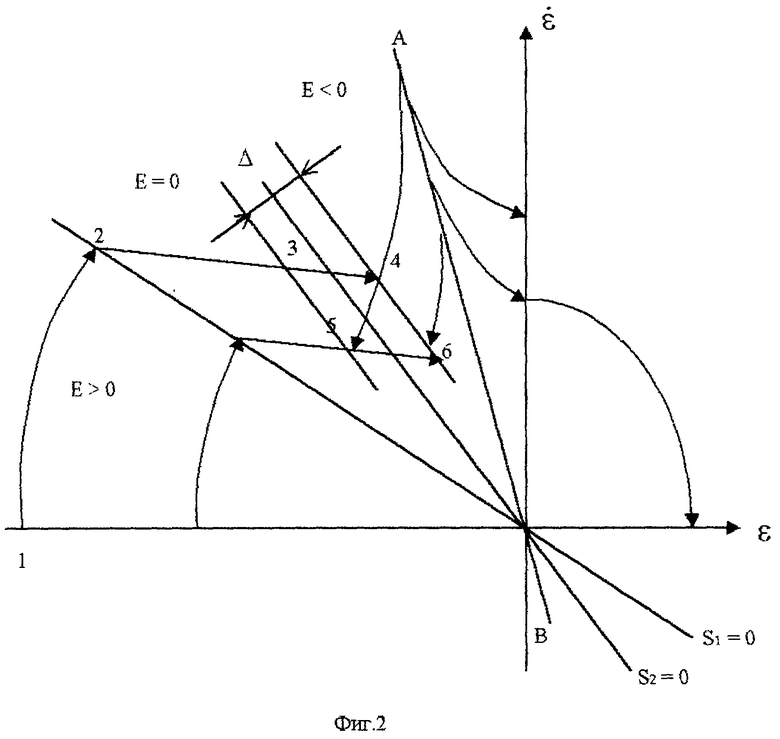
При достижении двигателем определенной скорости вращения происходит скачкообразная смена сигнала Е вследствие того, что происходит смена знака сигнала S1. Сигнал Е, а следовательно, и управление принимает значение, равное 0 (положение Е= 0 на фиг.2). Этому состоянию соответствует участок фазовой траектории 2-4 на фазовой плоскости на фиг.2. Затем происходит изменение знака S2, сигнал Е скачкообразно меняется, принимая значение, равное -2 (положение Е<0, участок фазовой траектории 4-5 на фиг.2). Абсолютная величина скорости вращения уменьшается, снова происходит изменение знака S2 и переключение второго релейного элемента 23 (участок 5-6 на фиг.2) и т.д. Возникает скользящий режим - движение в окрестности линии переключения S2=0, теоретически имевшее характер колебаний бесконечно большой частоты и стремящейся к нулю амплитуды.
Второй релейный элемент 23 имеет неидеальность - запаздывающий гистерезис с шириной зоны Δ. Реальный скользящий режим, имеющий высокую, но конечную частоту колебаний, с уменьшением Δ стремится к идеальному. На фиг.2 приведен фазовый портрет заявляемой адаптивной системы управления с переменной структурой, построенный с учетом того, что передаточная функция по скорости электродвигателя 8 соответствует апериодическому звену первого порядка. Различным структурам системы соответствуют спиральные и гиперболические траектории на фазовой плоскости. Реальный скользящий режим существует в Δ-окрестности линии переключения.
Анализ показывает, что структура реального скользящего процесса существенно зависит от близости расположения линии переключения к устойчивой вырожденной траектории семейства гиперболических траекторий (линия АВ на фиг. 2). Постоянная составляющая на выходе второго релейного элемента 23 при сближении с линией АВ по модулю близка к 2, а при повороте от линии АВ к оси стремится к 0. Это свойство используется в адаптивной системе управления с переменной структурой для адаптации к переменному моменту инерции нагрузки.
До момента попадания на линию переключения S1=0 с выхода второго сумматора 6 на вход фильтра 14 подается сигнал +2 или -2 в зависимости от состояния первого релейного элемента 5 и второго релейного элемента 23 (участок 1-2 на фиг.2). Передаточная функция фильтра 14 имеет вид
где τф - малая постоянная времени. Тогда на выходе фильтра 14 за малое время устанавливается сигнал, по модулю равный 2. Через второй блок 15 определения модуля сигнал поступает на вход второго измерителя рассогласования 16, на второй (вычитающий) вход которого подается сигнал с первого источника 17 опорного напряжения, настроенного на уровень 0,85-0,95 уровня выходного сигнала элемента 6. С выхода второго измерителя рассогласования 16 на интегратор 18 поступает малый по уровню сигнал (порядка 0,1-0,3). В результате на выходе интегратора 18 и, соответственно, на выходе третьего сумматора 19 сигнал медленно нарастает до момента попадания изображающей точки на линию переключения S1= 0. Время попадания, как правило, мало, поэтому уровень выходного сигнала третьего сумматора 19 определяется в основном значением сигнала на его втором входе со второго источника опорного напряжения 20. Последний настраивается таким образом, чтобы скользящий режим возникал при любом возможном значении варьируемого параметра (момента инерции). После попадания изображающей точки на линию переключения S1=0 происходит переключение первого релейного элемента 5, на его выходе сигнал становится равным -1, на выходе же второго релейного элемента 23 сигнал остается равным 1. Соответственно, на выходе второго сумматора 6 сигнал Е, а следовательно, и управление, становится равным 0 (участок 2-4 на фиг.2). В этом случае на фазовой плоскости движение происходит по прямой (положение Е=0 на фиг.2). Сигнал на выходе фильтра 14 ггринимает значение, равное 0. На выходе второго блока определения модуля 15 сигнал также равен 0. Во втором измерителе рассогласования 16 сигнал сравнивается с уровнем 1.8-1.9, задаваемым источником опорного напряжения 17. Интегратор 18 в этом случае перезаряжается отрицательным сигналом с выхода измерителя рассогласования 16. В результате сигнал на выходе третьего сумматора 19 уменьшается, уменьшается сигнал С, и линии переключения S1= 0 и S2=0 поворачиваются в область большей скорости. При попадании на вторую линию переключения S2=0 второй релейный элемент 23 переключается в состояние -1, сигнал Е на выходе второго сумматора, а следовательно, и управление, становится равным -2 (участок 4-5 на фиг.2). Возникают высокочастотные колебания элемента 23 - скользящий режим. Постоянная составляющая этого высокочастотного сигнала выделяется фильтром 14, во втором блоке определения модуля 15 определяется ее абсолютная величина, которая сравнивается с уровнем 1.8-1.9, задаваемым источником 17. Если линия переключения S2=0 находится далеко от устойчивой вырожденной траектории (линия АВ на фиг. 2), то интегратор 18 перезаряжается отрицательным выходным сигналом второго измерителя рассогласования 16. Таким образом, абсолютная величина наклона линий переключения S1=0 и S2=0 значительно увеличивается, и скорость затухания переходных процессов становится максимальной. Наибольшая скорость скольжения достигается при уровне выходного сигнала источника опорного напряжения 17, равного +1, однако при этом из-за изменения параметров объекта управления, шумов и прочих неопределенностей легко может произойти срыв скольжения. Поэтому уровень выходного сигнала источника 17 настраивается несколько меньшим (1.85-1.9). Этим также в процессе адаптации обеспечивается возможность поворота линии переключения в обе стороны, поскольку при изменении параметров объекта устойчивая траектория АВ сама изменяет пространственное положение.
Сигнал управления в заявленной адаптивной системе управления с переменной структурой формируется на основе суммы сигналов с выходов первого релейного элемента 5 и второго релейного элемента 23. Значение этой суммы на участке 1-2 траектории (см. фиг.2) равно 2. На участках 2-6 траектории эта сумма принимает значение 0 либо -2 (или 2 в зависимости от начальных условий). Результирующий сигнал управления в скользящем режиме получается однополярным.
Таким образом, использование однополярного управления в предложенной адаптивной системе управления с переменной структурой позволяет существенно уменьшить затраты энергии на управление.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2001 |
|
RU2210170C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235015C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235014C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2235016C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2146999C1 |
Изобретение относится к системам управления с переменной структурой и предназначено для управления объектами с переменными параметрами, а именно с изменяющимся моментом инерции, приведенным к валу исполнительного электродвигателя. Технический результат заключается в уменьшении расхода энергии на управление в адаптивной системе управления с переменной структурой. Система содержит два измерителя рассогласования, два блока определения модуля, два блока умножения, четыре сумматора, два релейных элемента, два усилителя, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, датчик скорости, фильтр, два источника опорного напряжения, интегратор. 2 ил.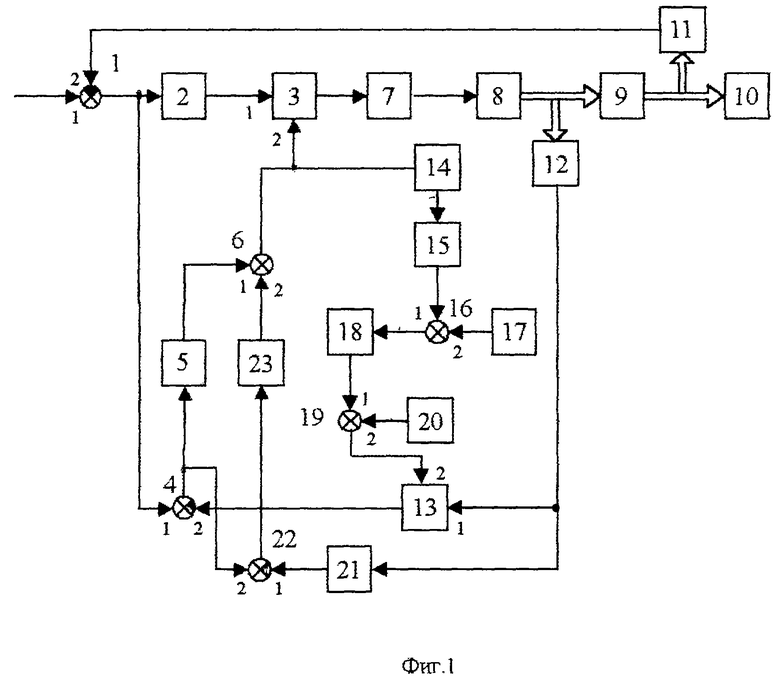
Адаптивная система управления с переменной структурой, содержащая последовательно соединенные первый измеритель рассогласования, первый блок определения модуля, первый блок умножения, ко второму входу которого через последовательно соединенные первый сумматор, первый релейный элемент и второй сумматор подключен выход первого измерителя рассогласования, усилитель, электродвигатель постоянного тока, редуктор, выходной вал которого механически соединен с входами объекта управления и датчика положения, выход которого соединен с вторым входом первого измерителя рассогласования, датчик скорости, вход которого механически соединен с валом электродвигателя, а выход через второй блок умножения соединен со вторым входом первого сумматора, фильтр, вход которого соединен с выходом второго сумматора, а выход через последовательно соединенные второй блок определения модуля, второй измеритель рассогласования, второй вход которого связан с выходом первого источника опорного напряжения, интегратор, третий сумматор, второй вход которого соединен с выходом второго источника опорного напряжения, соединен со вторым входом второго блока умножения, выход которого соединен с вторым входом первого сумматора, отличающаяся тем, что в нее дополнительно введены второй усилитель, четвертый сумматор и второй релейный элемент, причем вход второго усилителя соединен с выходом датчика скорости, а выход через последовательно соединенные четвертый сумматор, второй вход которого соединен с выходом первого сумматора, и второй релейный элемент соединен с вторым входом второго сумматора.
| SU 1526444 А1, 20.06.1996 | |||
| Бесконтактный следящий электропривод постоянного тока | 1972 |
|
SU463097A1 |
| Система с переменной структурой | 1988 |
|
SU1667003A1 |
| RU 94008940 А1, 10.01.1996 | |||
| ЛЕЧЕБНЫЙ КОСТЮМ АКСИАЛЬНОГО НАГРУЖЕНИЯ С АВТОМАТИЗИРОВАННОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2009 |
|
RU2401622C1 |

