Предлагаемое изобретение относится к системам автоматического цифрового управления объектами с нестационарными динамическими характеристиками, функционирующими в условиях высокого уровня контролируемых возмущений, и может найти применение в химической, нефтехимической и других отраслях промышленности.
Наиболее близкой по технической сущности и достигаемому эффекту является самонастраивающаяся система комбинированного регулирования, содержащая измеритель рассогласования, регулятор, блок умножения, сумматоры, объект управления, блок самонастройки, корректирующий фильтр, датчик возмущения, блок интегрального среднего (а.с. СССР 1511734, М. Кл.3 G 05 В 13/00).
В самонастраивающейся системе комбинированного регулирования нестационарных по статической характеристике объектов в процессе работы уточняются настройки регулятора и корректирующего фильтра по измерениям управляющего и возмущающего воздействий объекта управления.
Недостатком этой системы является неудовлетворительное качество управления в условиях нестационарности динамических характеристик объекта управления.
Техническая задача предлагаемого изобретения - повышение качества цифрового управления объектами с нестационарными динамическими характеристиками как при наличии, так и при отсутствии измеряемых возмущений.
Поставленная задача достигается тем, что в адаптивной цифровой комбинированной системе управления нестационарными технологическими объектами, содержащей элемент сравнения, на первый вход которого подается задание, а выход соединен с первым входом цифрового регулятора, выход которого подключен к первому входу сумматора, соединенного своим выходом с первым входом объекта управления, выход которого подключен ко второму входу элемента сравнения, компенсатор возмущения, на вход которого и на второй вход объекта управления подается текущее значение возмущения, а выход компенсатора возмущения соединен со вторым входом сумматора, новым является то, что в нее дополнительно введены блок текущей идентификации, блок текущей оптимизации и блок коррекции, при этом на входы блока текущей идентификации поступают текущие значения сигнала с выхода цифрового регулятора и управляемой величины с выхода объекта управления, а его выход соединен с входами блока текущей оптимизации и блока коррекции, выход блока текущей оптимизации соединен со вторым входом цифрового регулятора, а выход блока коррекции - со вторым входом компенсатора возмущения.
Технический результат изобретения выражается в улучшении качества управления за счет повышения динамической точности и уменьшения времени установления управляемой величины путем оптимизации настроек цифрового регулятора по выбранному критерию и корректировки настроек компенсатора возмущения из условия инвариантности в процессе функционирования системы на основе адаптации параметров дискретной динамической модели объекта по каналу управления.
На чертеже показана функциональная структурная схема для реализации предлагаемой системы.
Схема содержит элемент сравнения 1, цифровой регулятор 2, сумматор 3, объект управления 4, блок 5 текущей идентификации, блок 6 текущей оптимизации, блок 7 коррекции, компенсатор возмущения 8.
Адаптивная цифровая комбинированная система управления работает следующим образом.
Элемент сравнения 1 по текущим значениям задания и управляемой величины вырабатывает сигнал рассогласования еi на первый вход цифрового регулятора 2:
еi=yi 3-yi, (1)
где уi 3, уi - задание и текущее значение управляемой величины; i - текущий индекс такта квантования.
Цифровой регулятор 2 по сигналу рассогласования еi от элемента сравнения 1 вырабатывает сигнал ui p в соответствии с алгоритмом цифрового управления:
где ql p - настройки цифрового регулятора  m - порядок цифрового регулятора.
m - порядок цифрового регулятора.
С выхода цифрового регулятора 2 сигнал ui p подается на первый вход сумматора 3 и на второй вход блока 5 текущей идентификации.
Компенсатор возмущения 8 по текущему значению возмущения fi, поступающему на второй вход объекта управления 4, вырабатывает сигнал ui k:
где qj k, ql k - настройки компенсатора 
n, w, k, t - порядки полиномов дискретной динамической модели объекта.
dpв=de-dp, (4)
где dp, dв - число тактов запаздывания по каналу управления и каналу возмущения.
где τp, τв - время чистого запаздывания по каналам управления и возмущения; Т0 - длительность такта квантования.
Алгоритм управления компенсатора определяется из условия инвариантности:
где Wfy(z-1), Wuy(z-1) - передаточные функции по каналам "возмущающее воздействие - выход объекта управления" и "управляющее воздействие - выход объекта управления", записанные при помощи оператора сдвига z.
Сигнал ui k с выхода компенсатора возмущения 8 поступает на второй вход сумматора 3.
По текущему значению сигнала ui p от цифрового регулятора 2 и сигналу ui k от компенсатора возмущения 8 сумматор 3 формирует управляющее воздействие ui, которое поступает на вход объекта управления 4:
ui=ui р+ui k. (7)
Корректировка настроек цифрового регулятора 2 и компенсатора возмущения 8 в условиях нестационарности осуществляется на основе постоянно адаптируемых в процессе работы параметров дискретной динамической модели объекта управления 4:

yi = yi p + yi в, (10)
где yi p, yi в - выходы модели объекта по каналу управления и каналу возмущения соответственно; аs p, bh p - параметры модели по каналу управления; аv в, br в - параметры модели по каналу возмущения.
По текущим значениям сигнала yi с выхода объекта управления 4 и сигнала ui p с выхода цифрового регулятора 2 в блоке 5 текущей идентификации осуществляется адаптация параметров аs p, bh p модели объекта 4 по каналу управления рекуррентным методом наименьших квадратов.
С выхода блока 5 текущей идентификации адаптированные параметры аs p, bh p модели объекта 4 по каналу управления поступают на вход блока 6 текущей оптимизации и на вход блока 7 коррекции.
В блоке 6 текущей оптимизации осуществляется расчет оптимальных настроек qi p цифрового регулятора 2 (численным методом оптимизации) по критерию:
где Δu - отклонение управляющего воздействия от установившегося значения (Δui=ui-uN); r - весовой коэффициент, учитывающий затраты на управление; N - число тактов То - квантования, определяемое временем установления переходного процесса.
С выхода блока 6 текущей оптимизации рассчитанные значения настроек ql p поступают на второй вход цифрового регулятора 2, где используются в качестве новых настроечных параметров.
По информации о параметрах аs p, bh p модели объекта 4 по каналу управления от блока 5 текущей идентификации блок 7 коррекции осуществляет коррекцию настроек qk компенсатора возмущения 8 из условия (6) инвариантности. Скорректированные значения настроек qk с выхода блока 7 коррекции поступают на второй вход компенсатора возмущения 8.
Использование изобретения позволяет улучшить качество управления за счет повышения динамической точности и уменьшения времени установления управляемой величины путем оптимизации настроек цифрового регулятора по выбранному критерию и корректировки настроек компенсатора из условия инвариантности в процессе функционирования системы на основе адаптации параметров дискретной динамической модели объекта по каналу управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ОБЪЕКТАМИ СО СВЯЗАННЫМИ ПАРАМЕТРАМИ | 2003 |
|
RU2242040C1 |
| ЦИФРОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 2010 |
|
RU2422743C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОЦЕССОМ ПОЛУЧЕНИЯ ВИНИЛАЦЕТАТА НА ОСНОВЕ ЭТИЛЕНА | 2001 |
|
RU2184725C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ЭКСТРАКТИВНОЙ РЕКТИФИКАЦИИ | 1999 |
|
RU2146960C1 |
| ЦИФРОВАЯ МНОГОСВЯЗНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ СИНТЕЗА АММИАКА | 2006 |
|
RU2306590C1 |
| ЦИФРОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ РАСХОДА ЖИДКОСТИ С КОРРЕКЦИЕЙ ПО УРОВНЮ В ЕМКОСТИ-СБОРНИКЕ | 2007 |
|
RU2348960C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ОЧИСТКИ ОТРАБОТАННОГО ТЕПЛОНОСИТЕЛЯ | 2001 |
|
RU2187055C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СУШКИ | 2001 |
|
RU2200288C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭКСТРУДЕРОМ | 2001 |
|
RU2184653C1 |
Изобретение относится к системам автоматического цифрового управления объектами с нестационарными динамическими характеристиками, функционирующими в условиях высокого уровня контролируемых возмущений, и может найти применение в химической, нефтехимической и других отраслях промышленности. Технический результат изобретения - повышение качества цифрового управления объектами с нестационарными динамическими характеристиками как при наличии, так и при отсутствии измеряемых возмущений. Адаптивная цифровая комбинированная система управления нестационарными технологическими объектами содержит элемент сравнения, цифровой регулятор, сумматор, компенсатор возмущения, блок текущей идентификации, предназначенный для адаптации параметров модели объекта по каналу управления, блок текущей оптимизации, предназначенный для расчета оптимальных настроек цифрового регулятора, и блок коррекции, предназначенный для коррекции настроек компенсатора возмущения. 1 ил.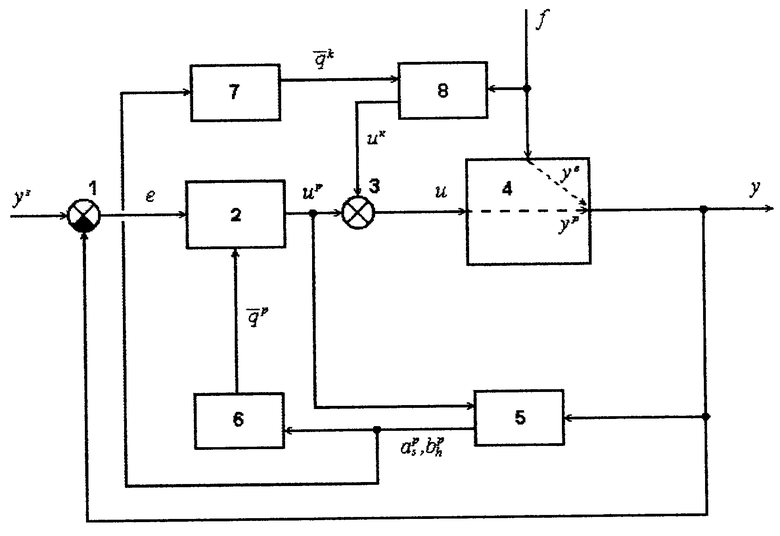
Адаптивная цифровая комбинированная система управления нестационарными технологическими объектами, содержащая элемент сравнения, на первый вход которого подается задание, а выход соединен с первым входом цифрового регулятора, выход которого подключен к первому входу сумматора, соединенного своим выходом с первым входом объекта управления, выход которого подключен ко второму входу элемента сравнения, компенсатор возмущения, на вход которого и на второй вход объекта управления подается текущее значение возмущения, а выход компенсатора возмущения соединен со вторым входом сумматора, отличающаяся тем, что в нее дополнительно введены блок текущей идентификации, предназначенный для адаптации параметров модели объекта по каналу управления, блок текущей оптимизации, предназначенный для расчета оптимальных настроек цифрового регулятора, и блок коррекции, предназначенный для коррекции настроек компенсатора возмущения, при этом на входы блока текущей идентификации поступают текущие значения сигнала с выхода цифрового регулятора и управляемой величины с выхода объекта управления, а его выход соединен с входами блока текущей оптимизации и блока коррекции, выход блока текущей оптимизации соединен со вторым входом цифрового регулятора, а выход блока коррекции - со вторым входом компенсатора возмущения.
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| US 4407013 А, 27.09.1983 | |||
| Тянущие ролики агрегата непрерывного действия | 1976 |
|
SU606656A1 |
| ИЗЕРМАН Р | |||
| Цифровые системы управления | |||
| - М.: Мир, 1984, с.354-360 | |||
| ОСТРЕМ К | |||
| и др | |||
| Системы управления с ЭВМ | |||
| - М.: Мир, 1987, с.376-380 | |||
| ШТЕЙНБЕРГ Ш.Е | |||
| Идентификация в системах управления | |||
| - М.: Энергоатомиздат, 1987, с.30 | |||
| БОЯРИНОВ А.И | |||
| Методы оптимизации в химической технологии | |||
| - М.: Химия, 1969, с.495-497. | |||

