Изобретение относится к системам автоматического цифрового управления двумерными объектами со связанными параметрами и нестационарными динамическими характеристиками и может найти применение в химической, нефтехимической и других отраслях промышленности.
Известна автономная система управления объектами со связанными параметрами, содержащая регуляторы обратной связи и компенсаторы перекрестных связей, обеспечивающая компенсацию внутренних динамических связей между управляемыми величинами (Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е.Г.Дудникова. - М.: Химия, 1987. С.55-57).
Наиболее близкой по технической сущности и достигаемому эффекту является самонастраивающаяся система комбинированного регулирования, содержащая измеритель рассогласования, регулятор, блок умножения, сумматоры, объект управления, блок самонастройки, корректирующий фильтр, датчик возмущения, блок интегрального среднего (а.с. СССР №1511734, МКИ3 G 05 В 13/00, от 30.09.89. Бюл. №36).
В самонастраивающейся системе комбинированного регулирования нестационарных по статической характеристике объектов в процессе работы уточняются настройки регулятора и корректирующего фильтра по измерениям управляющего и возмущающего воздействий объекта управления.
Недостатком этих систем является неудовлетворительное качество управления двумерными объектами со связанными параметрами в условиях нестационарности их динамических характеристик по основным каналам.
Техническая задача предлагаемого изобретения - повышение качества цифрового управления двумерными объектами со связанными параметрами и нестационарными динамическими характеристиками основных каналов при выполнении условия о квазистационарности перекрестных каналов.
Поставленная задача достигается тем, что в адаптивной цифровой системе управления двумерными нестационарными технологическими объектами со связанными параметрами, содержащей два элемента сравнения, на первые входы которых подаются задающие значения управляемых величин, а выходы соединены с первыми входами первого и второго соответствующих цифровых регуляторов, выходы которых подключены к первым входам соответственно первого и второго сумматоров, соединенных своими выходами соответственно с первым и вторым входами двумерного объекта управления со связанными параметрами, первый и второй выходы которого подключены ко вторым входам соответствующих элементов сравнения, первый и второй компенсаторы перекрестных связей, на первые входы которых подаются сигналы с выходов соответственно первого и второго цифровых регуляторов, а выходы первого и второго компенсаторов перекрестных связей соединены со вторыми входами соответственно второго и первого сумматоров, отличающаяся тем, что в нее дополнительно введены первый и второй фильтры, первый и второй блоки текущей идентификации, первый и второй блоки текущей оптимизации, первый и второй блоки адаптации компенсаторов перекрестных связей, при этом на первые входы первого и второго фильтров поступают текущие значения соответственно второго и первого входов двумерного объекта, а на вторые входы - соответственно первый и второй выходы двумерного объекта, а выходы первого и второго фильтров соединены соответственно с первыми входами первого и второго блоков текущей идентификации, на вторые входы которых поступают сигналы с выходов соответственно первого и второго сумматоров, выходы первого и второго блоков текущей идентификации соединены с входами соответственно первого и второго блоков текущей оптимизации и входами первого и второго блоков адаптации компенсаторов перекрестных связей, выходы первого и второго блоков текущей оптимизации соединены соответственно со вторыми входами первого и второго цифровых регуляторов, а выходы первого и второго блоков адаптации компенсаторов перекрестных связей - соответственно со вторыми входами второго и первого компенсаторов перекрестных связей.
Технический результат изобретения выражается в улучшении качества управления за счет повышения динамической точности и уменьшения времени установления управляемых величин путем адаптации цифровых регуляторов и компенсаторов перекрестных связей, рассчитанных из условия автономности, в процессе функционирования системы на основе текущей идентификации параметров дискретной динамической модели двумерного объекта с перекрестными связями по основным каналам.
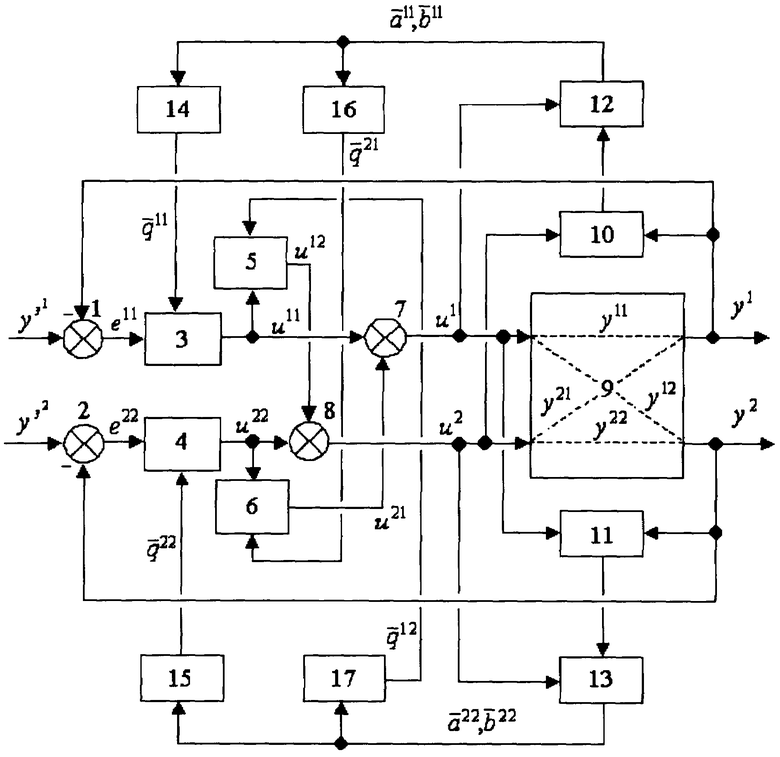
На чертеже показана функциональная структурная схема для реализации предлагаемой системы.
Схема содержит элементы сравнения 1, 2, цифровые регуляторы 3, 4, компенсаторы перекрестных связей 5, 6, сумматоры 7, 8, объект управления 9, фильтры 10, 11, блоки 12, 13 текущей идентификации, блоки 14, 15 текущей оптимизации, блоки 16, 17 адаптации компенсаторов перекрестных связей.
Адаптивная цифровая связанная система управления работает следующим образом.
Элементы сравнения 1, 2 по текущим значениям задающих и управляемых величин вырабатывают сигналы рассогласований  и
и  на первые входы цифровых регуляторов 3, 4
на первые входы цифровых регуляторов 3, 4

где  ,
,  ,
,  ,
,  - задающие и текущие значения управляемых величин; i - текущий индекс такта квантования.
- задающие и текущие значения управляемых величин; i - текущий индекс такта квантования.
Цифровые регуляторы 3, 4 по сигналам рассогласований  и
и  от соответствующих элементов сравнения 1 и 2 вырабатывают сигналы
от соответствующих элементов сравнения 1 и 2 вырабатывают сигналы  и
и  в соответствии с алгоритмами цифрового управления
в соответствии с алгоритмами цифрового управления
где g11, g22 - настройки цифровых регуляторов 3, 4; m11, m22 - порядки регуляторов 3, 4.
С выходов цифровых регуляторов 3, 4 сигналы  и
и  подаются на первые входы сумматоров 7, 8 и на первые входы компенсаторов перекрестных связей 5, 6.
подаются на первые входы сумматоров 7, 8 и на первые входы компенсаторов перекрестных связей 5, 6.
Компенсаторы перекрестных связей 5, 6, рассчитанные из условия автономности, по сигналам с выходов регуляторов 3, 4 вырабатывают сигналы  и
и  для компенсации влияния перекрестных связей по следующим алгоритмам:
для компенсации влияния перекрестных связей по следующим алгоритмам:
где  ,
,  ,
,  ,
,  - настройки компенсаторов перекрестных связей 5, 6; l12, m12, l21, m21 - порядки полиномов.
- настройки компенсаторов перекрестных связей 5, 6; l12, m12, l21, m21 - порядки полиномов.

где d11, d22, d12, d21 - числа тактов запаздывания по основным и перекрестным каналам.
Сигналы  и
и  с выходов компенсаторов перекрестных связей 5, 6 поступают на вторые входы сумматоров 8, 7 соответственно.
с выходов компенсаторов перекрестных связей 5, 6 поступают на вторые входы сумматоров 8, 7 соответственно.
По текущим значениям сигналов  ,
,  с выходов цифровых регуляторов 3, 4 и сигналов
с выходов цифровых регуляторов 3, 4 и сигналов  ,
,  , с выходов компенсаторов перекрестных связей 6, 5 сумматоры 7, 8 формируют управляющие воздействия
, с выходов компенсаторов перекрестных связей 6, 5 сумматоры 7, 8 формируют управляющие воздействия  и
и  , которые поступают на соответствующие входы объекта управления 9, первые входы фильтров 11, 10 и на вторые входы блоков 12, 13 текущей идентификации.
, которые поступают на соответствующие входы объекта управления 9, первые входы фильтров 11, 10 и на вторые входы блоков 12, 13 текущей идентификации.
Корректировка настроек цифровых регуляторов 3, 4 и компенсаторов перекрестных связей 5, 6 в условиях нестационарности осуществляется на основе текущей идентификации в процессе работы параметров дискретной динамической модели объекта управления 9





где  ,
,  ,
,  ,
,  - выходы объекта управления по основным и перекрестным каналам; n11, k11, n22, k22, n12, k12, n21, k21 - порядки левых и правых частей уравнений по основным и перекрестным каналам; а11, b11, а22, b22, а12, b12, а21, b21 - параметры разностных уравнений.
- выходы объекта управления по основным и перекрестным каналам; n11, k11, n22, k22, n12, k12, n21, k21 - порядки левых и правых частей уравнений по основным и перекрестным каналам; а11, b11, а22, b22, а12, b12, а21, b21 - параметры разностных уравнений.
В фильтрах 10, 11 по текущим измеренным значениям управляющих воздействий  ,
,  с выходов сумматоров 8, 7 по соответствующим уравнениям перекрестных каналов (8)-(7) рассчитываются значения выходов по этим каналам
с выходов сумматоров 8, 7 по соответствующим уравнениям перекрестных каналов (8)-(7) рассчитываются значения выходов по этим каналам  ,
,  . Затем по измеренным значениям управляемых величин
. Затем по измеренным значениям управляемых величин  ,
,  с выходов объекта управления 9 и рассчитанным значениям
с выходов объекта управления 9 и рассчитанным значениям  ,
,  вычисляются выходные соответствующие сигналы основных каналов
вычисляются выходные соответствующие сигналы основных каналов  ,
,  , поступающие на первые входы блоков 12, 13 текущей идентификации
, поступающие на первые входы блоков 12, 13 текущей идентификации


В блоках 12, 13 текущей идентификации по сигналам  ,
,  с выходов фильтров 10, 11 и
с выходов фильтров 10, 11 и  ,
,  с выходов сумматоров 7, 8 осуществляется текущая идентификация параметров а11, b11 и а22, b22 модели объекта управления 9 по основным каналам рекуррентным методом наименьших квадратов.
с выходов сумматоров 7, 8 осуществляется текущая идентификация параметров а11, b11 и а22, b22 модели объекта управления 9 по основным каналам рекуррентным методом наименьших квадратов.
С выходов блоков 12, 13 текущей идентификации значения уточненных параметров поступают на входы блоков 14, 15 текущей оптимизации и блоков 16, 17 адаптации компенсаторов перекрестных связей.
В блоках 14, 15 текущей оптимизации осуществляется расчет оптимальных настроек g11, g22 цифровых регуляторов 3, 4 (численным методом оптимизации) по критериям
где  ,
,  - отклонения управляющих воздействий от установившихся значения
- отклонения управляющих воздействий от установившихся значения  ; r1, r2 - весовые коэффициенты, учитывающие затраты на управление; N1, N2 - числа тактов квантования, определяемые временем установления переходного процесса.
; r1, r2 - весовые коэффициенты, учитывающие затраты на управление; N1, N2 - числа тактов квантования, определяемые временем установления переходного процесса.
С выходов блоков 14, 15 текущей оптимизации рассчитанные значения настроек g11, g22 поступают на вторые входы соответствующих цифровых регуляторов 3, 4, где используются в качестве новых настроечных параметров.
Алгоритмы управления компенсаторов перекрестных связей определяются из условия автономности

где W11(z-1), W22(z-1), W12(z-1), W21(z-1) - передаточные функции по основным и перекрестным каналам, записанные при помощи оператора сдвига z.
Анализ произведений полиномов числителей и знаменателей передаточных функций, получаемых после соответствующих подстановок в зависимостях (14), позволил вывести универсальные формулы адаптации структуры и настроек алгоритмов управления компенсаторов перекрестных связей при условии, что значения порядков полиномов n11, k11, n22, k22, n12, k12, n21, k21 и параметров а11, b11, а22, b22, а12, b12, а21, b21 определены

где  ,
,  - параметры полиномов числителей и знаменателей передаточных функций компенсаторов перекрестных связей, получаемых после преобразования зависимостей (14);
- параметры полиномов числителей и знаменателей передаточных функций компенсаторов перекрестных связей, получаемых после преобразования зависимостей (14);  ;
;  .
.


где  ;
;  ;
;  ;
;  .
.

Проведенный анализ также показал, что верхние и нижние пределы сумм в выражениях (17) могут принимать различные значения в зависимости от структуры (порядков) моделей объекта управления 9, и для расчета их значений были сформулированы условия (19)-(20)


где r, s - индексы при коэффициентах  .
.
Полученные соотношения позволяют выполнять расчет (адаптацию) компенсаторов для любых структур и параметров передаточных функций основных и перекрестных каналов в контуре адаптации цифровой связанной системы управления в автоматическом режиме при наличии как параметрической, так и структурной нестационарности.
Таким образом, по информации о параметрах а11, b11, а22, b22 модели объекта управления 9 по основным каналам от блоков 12, 13 текущей идентификации, при условии квазистационарности параметров модели а12, b12, а21, b21, по перекрестным каналам и порядкам полиномов n11, k11, n22, k22, n12, k12, n21, k21 в блоках 16, 17 адаптации компенсаторов перекрестных связей осуществляется коррекция настроек g21, g12 компенсаторов перекрестных связей 6, 5 по формулам (15)-(20). Скорректированные значения настроек g21, g12 с выходов блоков 16, 17 адаптации компенсаторов перекрестных связей поступают на вторые входы компенсаторов перекрестных связей 6, 5 соответственно.
Использование изобретения позволяет улучшить качество управления за счет повышения динамической точности и уменьшения времени установления управляемых величин путем адаптации цифровых регуляторов и компенсаторов перекрестных связей, используя разработанные универсальные зависимости (15)-(20), в процессе функционирования системы на основе текущей идентификации параметров дискретной динамической модели объекта по основным каналам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 2010 |
|
RU2422743C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2001 |
|
RU2211470C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
Изобретение относится к системам автоматического цифрового управления двумерными объектами со связанными параметрами и нестационарными динамическими характеристиками. Технический результат изобретения - повышение качества цифрового управления. Система управления содержит элементы сравнения, цифровые регуляторы, сумматоры, компенсаторы перекрестных связей, фильтры, блоки текущей идентификации, блоки текущей оптимизации и блоки адаптации компенсаторов перекрестных связей. 1 ил.
Адаптивная цифровая система управления двумерными нестационарными технологическими объектами со связанными параметрами, содержащая два элемента сравнения, на первые входы которых подаются задающие значения управляемых величин, а выходы соединены с первыми входами первого и второго соответствующих цифровых регуляторов, выходы которых подключены к первым входам соответственно первого и второго сумматоров, соединенных своими выходами соответственно с первым и вторым входами двумерного объекта управления со связанными параметрами, первый и второй выходы которого подключены ко вторым входам соответствующих элементов сравнения, первый и второй компенсаторы перекрестных связей, на первые входы которых подаются сигналы с выходов соответственно первого и второго цифровых регуляторов, а выходы первого и второго компенсаторов перекрестных связей соединены со вторыми входами соответственно второго и первого сумматоров, отличающаяся тем, что в нее дополнительно введены первый и второй фильтры, первый и второй блоки текущей идентификации, первый и второй блоки текущей оптимизации, первый и второй блоки адаптации компенсаторов перекрестных связей, при этом на первые входы первого и второго фильтров поступают текущие значения соответственно второго и первого входов двумерного объекта, а на вторые входы - соответственно первый и второй выходы двумерного объекта, а выходы первого и второго фильтров соединены соответственно с первыми входами первого и второго блоков текущей идентификации, на вторые входы которых поступают сигналы с выходов соответственно первого и второго сумматоров, выходы первого и второго блоков текущей идентификации соединены с входами соответственно первого и второго блоков текущей оптимизации и входами первого и второго блоков адаптации компенсаторов перекрестных связей, выходы первого и второго блоков текущей оптимизации соединены соответственно со вторыми входами первого и второго цифровых регуляторов, а выходы первого и второго блоков адаптации компенсаторов перекрестных связей - соответственно со вторыми входами второго и первого компенсаторов перекрестных связей.
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| RU 96120056 A, 10.01.1999 | |||
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| US 4407013 A, 27.09.1983 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Автоматическое управление в химической промышленности | |||
| Под ред | |||
| ДУДНИКОВА Е.Г | |||
| - М.: Химия, 1987, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

