Изобретение относится к устройству и способу канального кодирования/декодирования для системы связи, а более конкретно к устройству и способу канального кодирования/декодирования для выполнения программно-решаемого итеративного декодирования.
Предшествующий уровень техники
Турбокодировщик является типичным канальным кодировщиком, поддерживающим итеративное декодирование. Турбокодировщики подразделяются на два класса: параллельные турбокодировщики и последовательные турбокодировщики. Несмотря на то, что настоящее изобретение будет описано в отношении параллельного турбокодировщика, оно применимо и для последовательного турбокодировщика, работающего совместно с устройством итеративного декодирования.
Турбокодировщик кодирует N-битовый кадр входных данных в равноценные символы, используя два простых параллельных каскадных кода, при этом для составных кодов обычно используются рекурсивные систематические сверточные (РСС) коды.
На фиг.1 и 2 изображены стандартные турбокодировщик и декодировщик соответственно, которые детально описаны в патенте США 5446747.
Согласно фиг.1 перемежитель 16 соединяет первый и второй составные кодировщики 12 и 14. Как хорошо известно в технике, для первого и второго кодировщика 12 и 14 могут использоваться РСС коды. Перемежитель 16 имеет тот же размер, что и длина N кадра входных данных, и изменяет структуру битового потока dk входных данных, передаваемых второму составному кодировщику 14 для уменьшения корреляции между битами данных. Следовательно, выходные параллельные каскадные коды для битового потока dk входных данных становится xk (т. е. dk без изменения), y1k и y2k.
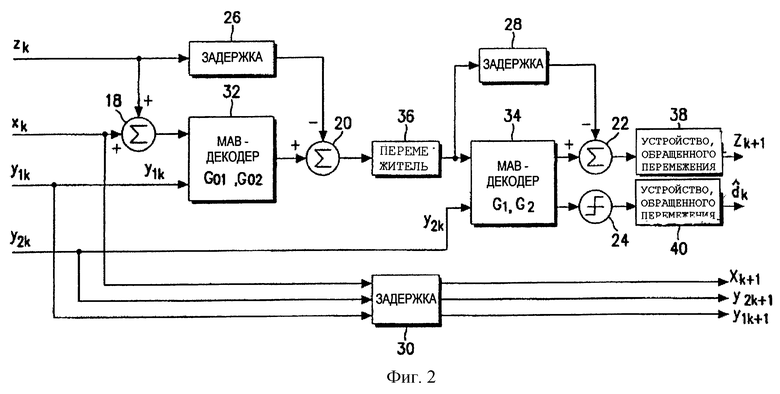
На фиг.2 представлена функциональная схема, поясняющая конфигурацию стандартного турбодекодировщика. Турбодекодировщик содержит сумматор 18, вычитающие устройства 20 и 22, программно-решаемую схему 24, устройства задержки 26, 28 и 30, и декодировщики МАВ (максимальной апостериорной вероятности) 32 и 34. Также турбодекодировщик содержит перемежитель 36, идентичный перемежителю 16, показанному на фиг.1, и устройства обращенного перемежения 38 и 40. Турбодекодировщик осуществляет итеративное декодирование входных данных в блоке кадра, используя декодирующий алгоритм МАВ, при этом коэффициент битовой ошибки (КБО) уменьшается при увеличении количества итеративных декодирований. В общем, для турбодекодировщика может использоваться не только декодировщик МАВ, но также и декодировщик АВПВ (с алгоритмом Витерби программируемого выхода), который способен осуществлять программно-решаемое итеративное декодирование.
Как показано на фиг. 1, турбокодировщик содержит перемежитель 16, что подразумевает, что кодирование и декодирование должны выполняться в блоке кадра. Таким образом, понятно, что в турбодекодировщике, изображенном на фиг.2, требуемый объем памяти для декодировщиков МАВ, 32 и 34, увеличивается пропорционально величине, получаемой умножением длины кадра на число состояний кодировщиков 12 и 14, изображенных на фиг.1.
Для реализации различных видов обработки данных, таких как звук, символ, изображение, обработка движущихся картинок, скорость передачи данных в системе связи колеблется от нескольких Кб/с до нескольких МБ/с, а длина кадров данных, поступающих в канальный кодировщик, меняется от нескольких мс (миллисекунд) до нескольких сот мс. В частности, канальный декодировщик, осуществляющий итеративное декодирование, типа турбодекодировщика, имеет коэффициент битовой ошибки (КБО), уменьшающийся при увеличении количества итеративных декодирований. Однако увеличение количества итеративных декодирований неизбежно приводит к увеличению объема вычислений, к увеличению потребления декодировщиком энергии и увеличению временной задержки. Поэтому в канальном декодировщике, использующем итеративное декодирование, количество итеративных декодирований обычно не зависимо от вида обработки фиксировано на уровне величины, удовлетворяющей допустимой временной задержке.
Однако поскольку состояние канала передачи данных со временем изменяется, то при фиксированном числе итеративных декодирований может быть не получен требуемый коэффициент битовой ошибки в худшем состоянии канала. При обработке пакетов данных, которое меньше зависит от временной задержки передачи данных, требуемый коэффициент битовой ошибки можно получить путем увеличения числа итеративных декодирований. Однако когда число итеративных декодирований фиксировано на уровне максимального значения в рассмотрении только худшего состояния канала, объем вычислений излишне возрастает, вызывая увеличение потребления энергии декодировщика в хорошем состоянии канала. Более того, даже если временная задержка передачи данных увеличивается, то, если это необходимо, следует увеличить количество итеративных декодирований в соответствии с классом пользователя или классом принимаемых данных. Коэффициент битовой ошибки и временная задержка определяются в соответствии с классом данных. Следовательно, количество итеративных декодирований необходимо менять в соответствии с видом обработки, классом данных и состояний канала.
Сущность изобретения
Задачей настоящего изобретения является обеспечение устройства и способа канального кодирования/декодирования для изменения количества итеративных декодирований в соответствии с видом обработки и классом данных.
Другой задачей настоящего изобретения является обеспечение устройства канального кодирования/декодирования для изменения числа итеративных декодирований в соответствии с изменяющимся во времени состоянием канала.
Настоящее изобретение предусматривает принимающее устройство для системы связи. В принимающем устройстве приемник информации сообщения принимает информацию о сообщении, которое будет принято. Контроллер определяет количество итеративных декодирований для декодировщика в соответствии с принятой информацией о сообщении. Декодировщик итеративно декодирует принятое сообщение в соответствии с определенным количеством итеративных декодирований.
Информация сообщения содержит класс принимаемых данных, а класс данных содержит требуемое значение коэффициента битовой ошибки (КБО). Количество итеративных декодирований увеличивается для меньшего КБО. Дополнительно класс данных содержит допустимую временную задержку, при этом количество итеративных декодирований увеличивается для более длительной допустимой временной задержки.
Дополнительно информация о сообщении содержит вид обработки принимаемых данных, и количество итеративных декодирований уменьшается, когда видом обработки является обработка движущейся картинки, так как упомянутая обработка должна быть произведена с короткими временными задержками.
Краткое описание чертежей
Описанные выше и другие задачи, а также свойства и преимущества настоящего изобретения поясняются в последующем детальном описании согласно чертежам, из которых:
Фиг. 1 является функциональной схемой, иллюстрирующей стандартный турбокодировщик,
Фиг. 2 является функциональной схемой, иллюстрирующей стандартный турбодекодировщик,
Фиг. 3 является функциональной схемой, иллюстрирующей канальный передатчик в соответствии с предпочтительным вариантом осуществления настоящего изобретения,
Фиг. 4 является функциональной схемой, иллюстрирующей канальный приемник в соответствии с предпочтительным вариантом осуществления настоящего изобретения,
Фиг. 5 является функциональной схемой, иллюстрирующей другой канальный приемник в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения,
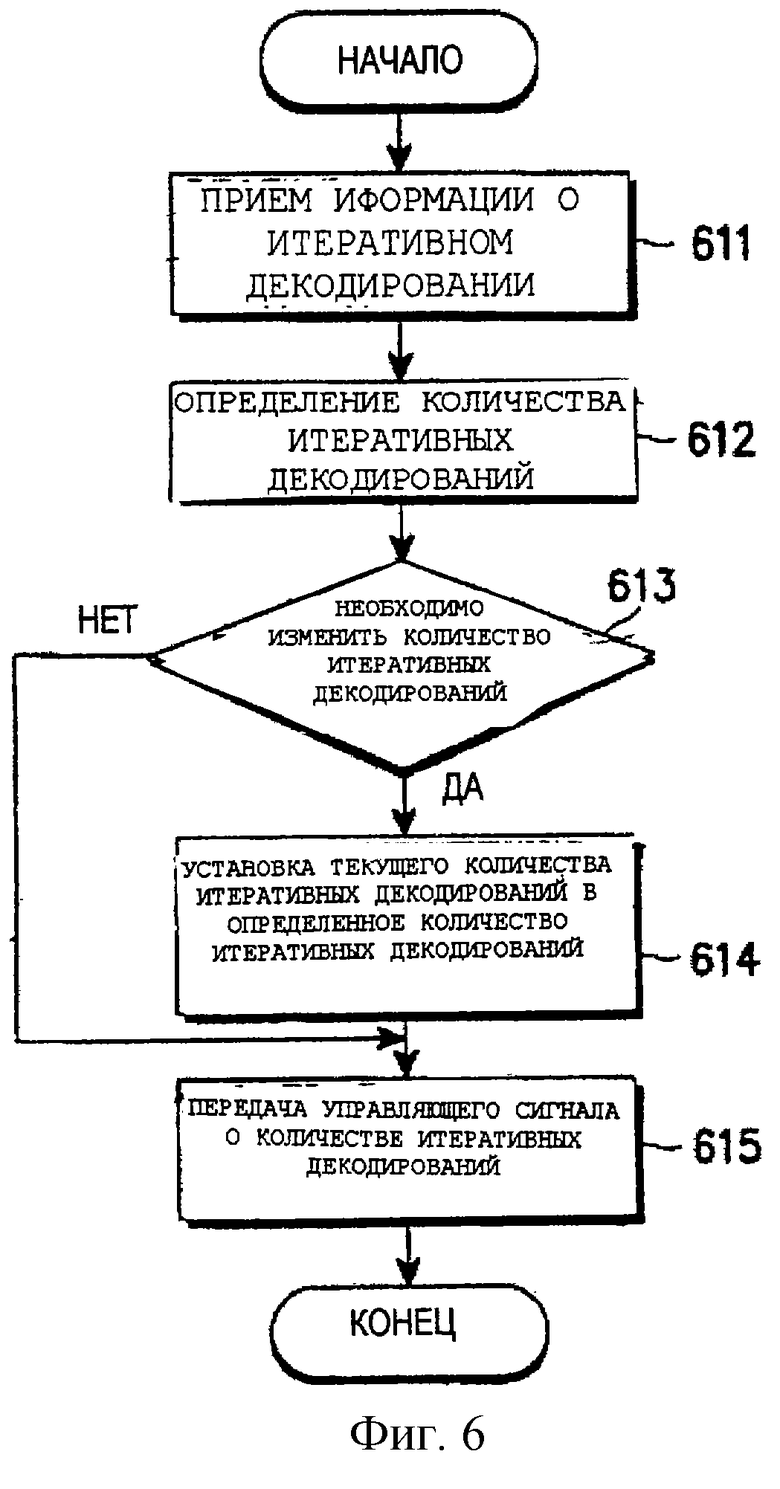
Фиг. 6 является блок-схемой, иллюстрирующей процесс управления контроллера итеративного декодирования в соответствии с предпочтительным вариантом осуществления настоящего изобретения,
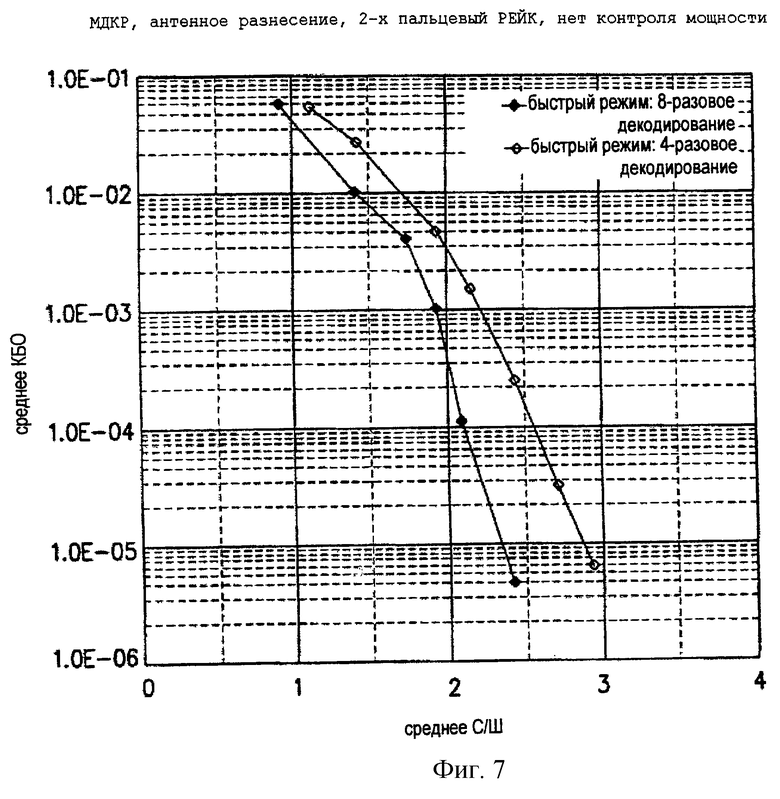
Фиг. 7 является графиком, иллюстрирующим результат моделирования как функцию количества итеративных декодирований в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Детальное описание предпочтительных вариантов осуществления
Ниже согласно сопровождающим чертежам будет описан предпочтительный вариант осуществления настоящего изобретения. В дальнейшем описании хорошо известные конструкции или функции не будут описаны детально, чтобы акцентировать внимание на настоящем изобретении.
В предпочтительном варианте осуществления настоящего изобретения для канального кодировщика используется турбокодировщик, а для программно-решаемого итеративного декодирования используется декодировщик МАВ. Для программно-решаемого итеративного декодирования также может использоваться декодировщик АВПВ.
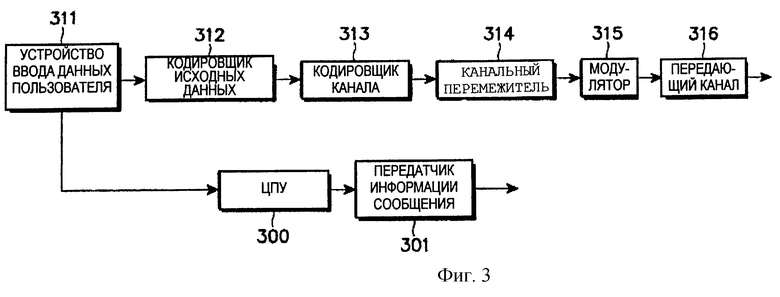
На фиг. 3 изображен канальный передатчик, содержащий канальный турбокодировщик, в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Канальный турбокодировщик кодирует данные пользователя, принимаемые в блоке N-битового входного кадра, и передает кодируемые данные пользователя по каналу передачи данных.
Кодировщик 312 исходных данных сжимает и кодирует данные пользователя, поступающие из устройства 311 ввода данных пользователя. Канальный кодировщик 313 кодирует выходные данные кодировщика 312 исходных данных. В данном варианте осуществления настоящего изобретения для канального кодировщика 313 используется турбокодировщик. Модулятор 315 модулирует (или осуществляет разброс) выходные данные перемежителя 314 и передает модулированные выходные данные через канал передачи 316. Блок центрального процессора (ЦПУ) 300 определяет вид обработки данных (звук, символ, изображение, обработка движущихся картинок) и класс данных и отправляет информацию о сообщении, о виде обработки и классе данных передатчику информации о сообщении 301. Упомянутый класс данных содержит требуемый коэффициент битовой ошибки (КБО) и допускаемую временную задержку. Класс данных и вид обработки могут быть определены предварительно не только во время установки вызова, но и во время обработки.
Находясь в рабочем состоянии, после приема данных пользователя из устройства 311 ввода данных пользователя, кодировщик 312 исходных данных кодирует данные пользователя и передает кодированные данные канальному кодировщику 313. Данными пользователя могут являться символы, изображения или движущиеся картинки, имеющие скорость данных в несколько десятков Кб/с и больше, а также звуковые данные, имеющие скорость в несколько Кб/с. ЦПУ 300 передает информацию о сообщении, о виде обработки и классе данных пользователя через передатчик информации о сообщении 301.
Несмотря на то, что настоящее изобретение описывается для варианта осуществления, в котором информация о сообщении передается декодировщику через отдельный канал, также можно передавать информацию сообщения в головной или конечной области передающего кадра при передаче данных пользователя.
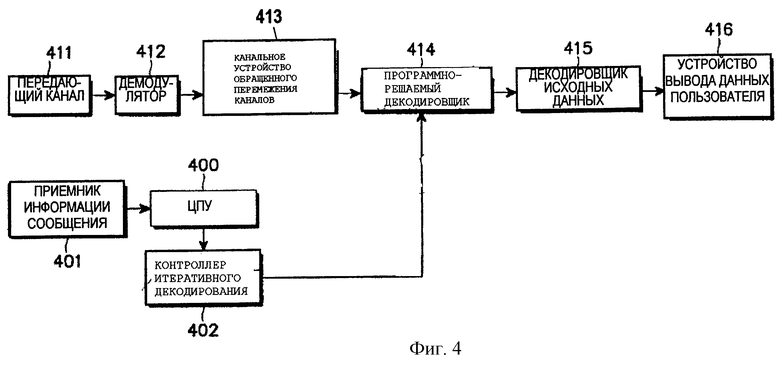
Фиг. 4 изображает канальный приемник, содержащий канальный декодировщик, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Согласно фиг.4 демодулятор 412 демодулирует входной сигнал, принимаемый через канал передачи 411. Канальное устройство 413 обращенного перемежения устраняет перемежения в выходных данных демодулятора 412. Приемник информации о сообщении 401 принимает информацию сообщения, передаваемую передатчиком информации о сообщении 301, изображенным на фиг.3, и передает ее ЦПУ 400. ЦПУ 400 анализирует полученную информацию сообщения и передает информацию о итеративном декодировании контроллеру итеративного декодирования 402. После этого контроллер итеративного декодирования 402 анализирует информацию о итеративном декодировании, переданную ЦПУ 400 для определения в соответствии с анализом количества итеративных декодирований, и управляет программно-решаемым декодировщиком 414 согласно определенному количеству итеративных декодирований. Здесь количество итеративных декодирований уменьшается при обработке двигающихся картинок, допускающей только короткие временные задержки, и увеличивается при обработке символов, допускающей более длительные временные задержки. Дополнительно, даже во время декодирования, если значение КБО или ККО (коэффициент кадровой ошибки) выше порогового значения, то число итеративных декодирований увеличивается. Программно-решаемый декодировщик 414 осуществляет итеративное декодирование выходных данных канального устройства 413 обращенного перемежения под управлением контроллера итеративного декодирования 402. Для программно-решаемого декодировщика 414 может быть использован декодировщик МАВ или АВПВ. Декодировщик 415 исходных данных декодирует выходные данные программно-решаемого декодировщика 414 и передает декодированные выходные данные устройству вывода данных пользователя 416.
Как упоминалось ранее, информация сообщения содержит вид обработки данных (звук, символ, изображение, обработку движущихся картинок) и класс данных. Класс данных содержит требуемый КБО и допустимую временную задержку. Информация сообщения используется для определения числа итеративных декодирований. Для меньшего КБО или более длительной временной задержки контроллер итеративного декодирования 402 увеличивает число итеративных декодирований.
Канальный декодировщик 414 осуществляет итеративное декодирование данных пользователя в соответствии с управляющим сигналом количества итеративных декодирований, передаваемым контроллером итеративного декодирования 402. При приеме через передаточный канал 411 данных кадра, демодулятор 412 демодулирует принятые данные и передает демодулированные данные канальному устройству 413, устраняющему перемежение.
Канальное устройство 413 обращенного перемежения устраняет перемежение демодулированных данных и передает декодировщику 414 данные, в которых устранено перемежение. В это время приемник информации о сообщении 401 принимает информацию сообщения о виде обработки и классе данных, переданную изображенным на фиг.3 передатчиком информации о сообщении 301, и передает принятую информацию о сообщении ЦПУ 400. После этого ЦПУ 400 анализирует информацию о сообщении и передает информацию о итеративном декодировании контроллеру итеративного декодирования 402.
Контроллер итеративного декодирования 402 анализирует информацию о итеративном декодировании для определения количества итеративных декодирований. Основываясь на результатах определения, контроллер итеративного декодирования 402, если необходимо, изменяет количество итеративных декодирований программно-решаемого декодировщика 414.
Программно-решаемый декодировщик 414 осуществляет итеративное декодирование выходных данных канального устройства 413 обратного перемежения, в соответствии с управляющим сигналом количества итеративных декодирований, передаваемым контроллером итеративного декодирования 402. Контроллер 400 контролирует длительность всего процесса декодирования согласно изменению количества итеративного декодирования. Выходные данные программно-решаемого декодировщика 414 передаются через декодировщик исходных данных 415 на вход устройства вывода данных пользователя 416.
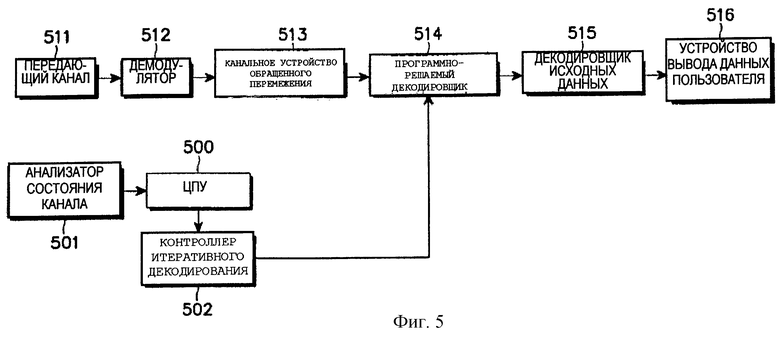
На фиг.5 изображен другой канальный приемник, содержащий канальный декодировщик, в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения.
Согласно фиг.5 канальный приемник не содержит изображенный на фиг.4 передатчик 401 информации сообщения. Однако информация о сообщении, о виде обработки и классе данных, может передаваться канальному приемнику передатчиком отдельно. В канальном приемнике анализатор состояния канала 501 изменяет количество итеративных декодирований программно-решаемого декодировщика 414 в соответствии с изменяющимся во времени состоянием канала. Например, в системе связи МДКРК (множество доступа с кодовым разделением каналов) при обмене данными с множеством мобильных станций базовая станция передает соответствующим мобильным станциям сигнал об уровне помех среди обратных канальных сигналов, принимаемых от мобильных станций по каналу передачи сообщений. Упомянутый сигнал об уровне помех используется для определения состояния канала мобильной станции. Альтернативно мобильные станции могут определить состояние канала, анализируя пилот-сигнал, передаваемый базовой станцией для измерения отношения сигнал/шум (СШО) сигнала.
Демодулятор 512 демодулирует входной сигнал, принимаемый по каналу 511 передачи. Канальное устройство 413 обратного перемежения устраняет перемежение в выходных данных демодулятора 512. Анализатор состояния канала 501 анализирует состояние канала, измеряя отношение сигнал/шум (СШО), и передает результаты анализа ЦПУ 500. ЦПУ 500 передает информацию об измеренном СШО контроллеру итеративного декодирования 502. После этого контроллер итеративного декодирования 502 анализирует принятую информацию для определения, требуется ли изменение текущего количества итеративных декодирований, и в соответствии с определением изменяет количество итеративных декодирований программно-решаемого декодировщика 514. Программно-решаемый декодировщик 514 осуществляет итеративное декодирование выходных данных канального устройства 513 обратного перемежения под управлением контроллера итеративного декодирования 502. Для программно-решаемого декодировщика 514 могут использоваться декодировщики МАВ или АВПВ. Декодировщик 515 исходных данных декодирует выходные данные программно-решаемого декодировщика 514 и передает выходные данные устройству вывода данных пользователя 516.
Анализатор состояния канала 501 во время действия измеряет СШО, используя передаваемые базовой станцией управляющий сигнал уровня помех и пилот-сигнал, и передает информацию об измеренном СШО к ЦПУ 500. ЦПУ 500 передает информацию об измеренном СШО контроллеру итеративного декодирования 502. Контроллер итеративного декодирования 502 анализирует информацию о итеративном декодировании и определяет, требуется ли изменить текущее количество итеративных декодирований для программно-решаемого декодировщика 514. Например, контроллер итеративного декодирования 502 принимает решение об уменьшении количества итеративных декодирований, когда состояние канала передачи лучше порогового. Программно-решаемый декодировщик 514 декодирует выходные данные канального устройства 513 обратного перемежения в соответствии с управляющим сигналом числа итеративных декодирований от контроллера итеративного декодирования 502. Контроллер 500 контролирует длительность всего процесса декодирования, базируясь на изменении количества итеративных декодирований. Выходные данные программно-решаемого декодировщика 514 передаются через декодировщик исходных данных 515 на вход устройства вывода данных пользователя 516.
Далее, согласно фиг.6, будет описано действие контроллеров итеративного декодирования 402 и 502.
Контроллеры итеративного декодирования 402 и 502 на этапе 611 принимают от ЦПУ, 400 и 500 соответственно, информацию об итеративном декодировании. Информация об итеративном декодировании определяется путем анализа информации о сообщении, о виде обработки, классе данных и текущем состоянии канала. На этапе 612 информация о итеративном декодировании анализируется для определения количества итеративных декодирований. На этапе 613 путем сравнения определенного количества итеративных декодирований с пороговым значением принимается решение о том, требуется ли изменение количества итеративных декодирований. Если принимается решение не изменять количество итеративных декодирований, то контроллеры итеративного декодирования 402 и 502 на этапе 615 передают программно-решаемым декодировщикам, 414 и 514 соответственно, управляющий сигнал количества итеративных декодирований в первом состоянии. В противном случае, когда необходимо изменить количество итеративных декодирований, на этапе 614 текущее количество итеративных декодирований изменяется до определенного количества итеративных декодирований. После этого, на этапе 615, программно-решаемым декодировщикам 414 и 514 передается соответствующий управляющий сигнал количества итеративных декодирований во втором состоянии.
На фиг.7 приведен график результата моделирования как функции количества итеративных декодирований канального декодировщика. Как показано на фиг.7, между 4-разовым итеративным декодированием и 8-разовым итеративным декодированием имеется значительная разница в коэффициенте битовой ошибки. Для осуществления обработки более высокого класса данных в состоянии, где изначально количество итеративных декодирований установлено равным 4, количество итеративных декодирований увеличивается до 8.
Как изложено выше, эффективность турбодекодировщика может быть повышена путем изменения количества итеративных декодирований в соответствии с видом обработки данных, классом данных и состоянием канала.
В то время как здесь были показаны конкретные предпочтительные варианты осуществления настоящего изобретения, должно быть понятно, что оно допускает различные изменения в форме и в деталях, попадающие в рамки и близкие по сущности данному изобретению, как определено прилагаемыми формулами изобретения.
Изобретения относятся к области вычислительной техники и могут быть использованы в системах связи. Техническим результатом является увеличение объема передаваемых сообщений. Варианты устройства содержат приемник информации сообщения, контроллер для определения количества итеративных декодирований в соответствии с принимаемой информацией сообщения и декодировщик принимаемых сигналов. Варианты способа основаны на определении количества итеративных декодирований для декодировщика в соответствии с анализом состояния приемного канала и обеспечении итеративного декодирования принимаемых сообщений в соответствии с определенным количеством итеративных декодирований. 6 с. и 14 з.п. ф-лы, 7 ил.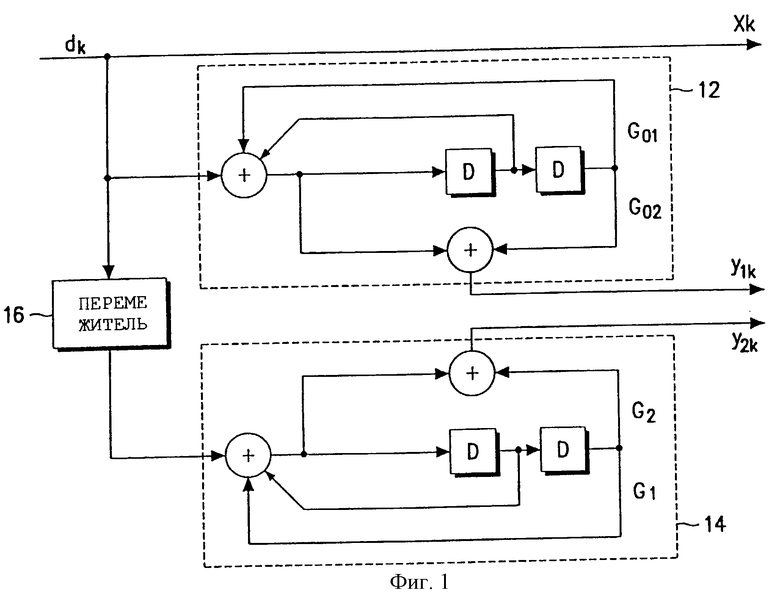
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| ЦИФРОВОЙ МНОГОКАНАЛЬНЫЙ СИНТЕЗАТОР СЕТКИ ЧАСТОТ | 1995 |
|
RU2108655C1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| RU 94014268 A1, 20.06.1996. | |||

