Область техники
Настоящее изобретение относится к устройству и способу управления автоматическим запросом повторной передачи (АЗП) в системе высокоскоростной передачи данных, более конкретно, к устройству и способу управления гибридным автоматическим запросом повторной передачи (ГАЗП) в системе высокоскоростной передачи данных.
Уровень техники
Системы мобильной связи разработаны для обеспечения высококачественных услуг связи перемещающимся пользователям. С развитием систем мобильной связи выполнялись исследования способов передачи пользователю возрастающего объема данных. Помимо этого системы мобильной связи уже перешли от аналоговых систем к цифровым системам. Цифровые системы мобильной связи имеют возможность передавать пользователям возросший объем данных на более высоких скоростях.
В общем случае в цифровых системах мобильной связи со значительным изменением состояния канала и одновременным использованием различных типов каналов трафика услуг, для удовлетворения требования высокоскоростной передачи данных, т.е., для повышения пропускной способности передачи, применяется схема гибридного автоматического запроса повторной передачи (ниже называемая "ГАЗП"). В частности, при коммерческой реализации услуги высокоскоростной передачи данных, активно проводились анализ и исследования технологии эффективного применения схемы ГАЗП с использованием кодов коррекции ошибок с переменной кодовой скоростью, а не схемы ГАЗП с применением существующих кодов коррекции ошибок с постоянной кодовой скоростью. Для канальной структуры для высокоскоростной передачи также рассматривается способ, использующий высокоуровневую модуляцию, такую как 8-уровневую фазовую манипуляцию (8-PSK) и 16-уровневую квадратурную амплитудную модуляцию (16-QAM) помимо обычной бинарной фазовой манипуляции (BPSK) или квадратурной фазовой манипуляции (QPSK), в качестве схемы модуляции.
В настоящее время система множественного доступа с кодовым разделением каналов 2000 для коэффициента расширения 1 (CDMA2000 1x) развития передачи данных и голоса (EV-DV), которая является новым стандартом передачи в синхронных системах CDMA проекта партнерства по системам третьего поколения (3GPP2), применяет в качестве своего стандарта схему кодирования, использующую квази-комплементарные турбо коды (ККТК). Квази-комплементарные турбо коды обеспечивают переменные кодовые скорости для схемы кодирования для схемы ГАЗП при высокоскоростной передаче данных и обеспечивают улучшение при гибком комбинировании рабочих характеристик с использованием ГАЗП. В системах EV-DV, передача/прием пакетных данных выполняется посредством операций ГАЗП или быстрой ГАЗП на физическом уровне. Это подробно описано ниже со ссылками на Фиг.1 и 2.
Фиг.1 является блок-схемой, иллюстрирующей взаимосвязь между верхним уровнем и физическим уровнем АЗП обработки в коммерческом варианте. По Фиг.1 физический уровень 110 декодирует данные, принимаемые по радиоканалу, и выдает декодированные кадры данных. Физический уровень 110 передает декодированные кадры данных на уровень 120 MAC, называемый верхним уровнем. Уровень 120 MAC определяет, имеет ли кадр данных, принятый от физического уровня 110, ошибку блока данных протокола (MuxPDU). В случае ошибки уровень 120 МАС повторно передает искаженные данные. В случае отсутствия ошибки уровень 120 МАС передает новый кадр. При выполнении обработки на уровне 120 MAC, поскольку данные, декодированные на физическом уровне, должны передаваться на верхний уровень для обработки, скорость обработки АЗП нежелательно уменьшается. Дополнительно, поскольку должна выполняться высокоскоростная обработка данных, нагрузка на уровень 120 МАС возрастает. Поэтому были предложены способы, в которых операции, выполняемые на верхнем уровне, выполняются на нижнем уровне. Такие способы предлагают структуру, в которой операция на физическом уровне, т.е. аппаратных средствах, выполняется таким же образом, что и операция программных средств. В этом контексте, если часть операций по Фиг.1 реализуется на физическом уровне, предоставляется структура для обработки части операций АЗП на физическом уровне, как показано на Фиг.2.
Фиг.2 иллюстрирует взаимосвязь между верхним уровнем и физическим уровнем в случае улучшенной быстродействующей (физической) обработки ГАЗП. Ниже приводится описание взаимосвязи между верхним уровнем и физическим уровнем для улучшенной быстродействующей обработки ГАЗП со ссылкой на Фиг.2. Структура по Фиг.2 реализуется, если структура по Фиг.1 выполняется на физическом уровне. Необходимо отметить, что такая структура не предлагалась до настоящего момента. Другими словами необходимо отметить, что концепция по Фиг.2, предполагаемая при применении способов, предлагаемых в настоящем описании, реально никогда не была реализована, и не обсуждались операции, описанные в нижеследующем разделе подробного описания.
Согласно Фиг.2, часть операции АЗП, которая выполнялась на уровне 230 МАС, выполняется на физическом уровне или на его промежуточном уровне для быстродействующей обработки АЗП и ответа АЗП. В этой схеме физический уровень 200 имеет основной физический уровень 210, выполняющий те же операции, что показанные на Фиг.1, и контроллер 220 ГАЗП. Контроллер 220 ГАЗП выполняет часть операций, которые выполнялись на традиционном уровне МАС, следовательно, контроллер 220 ГАЗП включен в структуру на физическом уровне, но выполняет часть операций уровня 230 МАС. Поскольку физический уровень определяет повторную передачу данных, время обработки для тех же данных сокращается.
Дополнительно, передача NAK на верхнем уровне может не выполнять гибкое комбинирование для тех же данных, поскольку физический уровень может поддерживать значение гибкого комбинирования для каждого символа. Однако, поскольку символы данных, передаваемые от физического уровня на уровень МАС, все представлены двоичными значениями (0 или 1), хотя символ повторяется при повторной передаче, не существует способа гибкого комбинирования повторяемого символа. Единственный способ представляет собой способ мажоритарной оценки для вычисления количества нулей и единиц для символов, имеющих двоичное значение, и сравнения количества нулей с количеством единиц для определения, таким образом, мажоритарного символа. Однако этот способ также не может быть использован на верхнем уровне, поскольку для этого требуется проводить множество вычислений. Напротив, передача NAK (неподтверждение приема) на физическом уровне обеспечивает возможность гибкого комбинирования кодовых символов для того же кодированного пакета, способствуя эффективному использованию ресурсов канала. Следовательно, является предпочтительным размещение контроллера 220 ГАЗП под подуровнем 230 мультиплексирования уровня МАС. Т.е. для уровня МАС является предпочтительным выполнять операции на физическом уровне.
Такая структура обладает быстрым временем обработки по сравнению с традиционным способом управления АЗП, работающим на основе протокола радио соединения (ПРС). Ниже приведено сравнение с существующим способом. В традиционном способе по Фиг.1 сигнал NAK принимается от одной пакетной передачи, и задержка двустороннего распространения, составляющая минимум примерно 200 мсек, имеет место до момента, когда по сигналу NAK осуществляется повторная передача пакета. Напротив, в способе по Фиг.2 ГАЗП создает очень короткую задержку двустороннего распространения, составляющую минимум примерно несколько мсек. Таким образом, указанная структура является подходящей для реализации адаптивной модуляции и кодирования (АМК).
Для реализации ГАЗП со структурой верхнего уровня и физического уровня по Фиг.1 и 2 требуется протокол повторной передачи передатчика для повторно передаваемого запроса (т.е. NAK, передаваемого от приемника). Для этого система 3GPP2 CDMA2000 1х EV-DV использует асинхронное и адаптивное поэтапное повышение избыточности (ААПИ), как описано ниже.
Базовая станция выполняет асинхронную передачу пакета на соответствующую мобильную станцию согласно качеству прямого канала. С этой целью схема модуляции и скорость кодирования пакета передачи адаптивно меняются согласно качеству канала. Дополнительно, пакеты, переданные безуспешно во время начальной передачи, передаются повторно, и во время повторной передачи может быть передана комбинация кодовых символов, которая отличается от таковых в начальной передаче. При такой схеме ААПИ повторной передачи увеличивается отношение сигнал/шум (ОСШ) пакетных данных вследствие возрастания количества повторных передач, и возрастает эффективность кодирования вследствие уменьшения скорости кодирования, тем самым повышая эффективность передачи/приема пакетных данных.
Канал, используемый для передачи прямых пакетных данных в системе 1хEV-DV, включает в себя прямой канал пакетных данных (F-PDCH) для полезного трафика и прямой канал управления пакетными данными (F-PDCCH) для управления каналом F-PDCH. Канал F-PDCH представляет собой канал для передачи кодированного пакета (КП), который представляет собой блок передаваемых данных, и максимум до 2-х каналов используется для одновременной передачи кодированных пакетов на 2 мобильные станции при помощи мультиплексирования с временным разделением (TDM)/мультиплексирования с кодовым разделением (CDM). Закодированный пакет кодируется турбо кодером, после чего некоторые из кодированных символов выбираются в качестве подпакета, имеющего определенную комбинацию (шаблон) поэтапно повышаемой избыточности (ПИ) за счет выбора символов ККТС. Подпакет представляет собой передаваемый блок для начальной передачи и повторной передачи, и на каждой передаче шаблон ПИ подпакета идентифицируется идентификатором подпакета (ППИД). Схема модуляции (QPSK, 8PSK или 16QAM) и длина временного интервала (слота) передачи (1, 2 или 4 слота) подпакета определяется согласно информации о качестве прямого канала, переданной мобильной станцией, и ресурсам (количество кодов Уолша и мощность, назначенная каналу F-PDCH) базовой станции.
Информация, относящаяся к демодуляции и декодированию канала F-PDCH, мультиплексируется с каналом F-PDCH через другие ортогональные каналы в том же периоде слота, и затем передается по каналу F-PDCCH, который является каналом управления. Информация, включаемая в канал F-PDCCH, является принципиально важной для выполнения операций ГАЗП физического уровня в мобильной станции и требует следующее:
1) фрагментированная информация о коде Уолша, доступная для канала F-PDCH раз в пределах от нескольких десятков до нескольких сотен миллисекунд;
2) индентификатор MAC_ID мобильной станции МС, которой назначен канал F-PDCH;
3) АКИД: ИД для идентификации 4-х АЗП каналов (ИД канала АЗП);
4) ППИД: ИД для идентификации шаблона ПИ пакета;
5) EP_NEW: информация для разделения двух последовательных кодированных пакетов в одном канале АЗП;
6) EP_SIZE: битовый размер кодированного пакета и
7) ИПКУ (индекс последнего кода Уолша): информация о коде Уолша, используемом в канале F-PDCH.
В то же время, в мобильной станции прием пакетных данных выполняется, начиная с декодирования канала F-PDCCH. Сначала мобильная станция декодирует канал F-PDCCH, определяя, передается ли ее пакет, и в случае, если устанавливается, что передаваемый пакет является ее пакетом, мобильная станция выполняет демодуляцию и декодирование канала F-PDCH. Если принимаемый в настоящее время подпакет является подпакетом, повторно передаваемым для уже принятого кодированного пакета, мобильная станция выполняет декодирование после комбинирования кода, принимаемого подпакета с кодовыми символами кодированного пакета, который был уже принят и сохранен. Если декодирование прошло успешно, мобильная станция передает сигнал АСК (подтверждение приема) через обратный канал (R-ACKCH) передачи ACK/NAK, позволяя базовой станции передать подпакет следующего кодированного пакета. Если декодирование не является успешным, мобильная станция передает сигнал NAK (неподтверждения приема), запрашивая у базовой станции передачу подпакета для того же кодированного пакета.
Элемент, для которого выполняется операция ГАЗП физического уровня для одного кодированного пакета, называется "канал АЗП". В системе CDMA2000 1хEV-DV, одновременно могут использоваться 4 канала АЗП, и они определяются как "N=4 быстрых канала ГАЗП".
В стандарте 1хEV-DV предусмотрено, что задержка ACK/NAK, необходимая для выполнения мобильной станцией операции приема пакета и передачи ACK/NAK, и количество одновременно доступных каналов АЗП, которые должны быть предоставлены базовой станции мобильной станцией, и это является вопросом реализации для мобильной станции. Поэтому возможная задержка ACK/NAK, поддерживаемая мобильной станцией, составляет 1 слот (=1,25 мсек) или два слота (2,5 мсек), и возможное количество каналов АЗП составляет 2, 3 или 4. Далее со ссылкой на Фиг.3 или 4 дается описание работы в зависимости от задержки ACK/NAK и количества каналов АЗП.
Фиг.3 является временной диаграммой обмена между базовой станцией и мобильной станцией для задержки ACK/NAK = 1 слот в ГАЗП в системе мобильной связи, и Фиг.4 является временной диаграммой обмена между базовой станцией и мобильной станцией для задержки ACK/NAK = 2 слота в ГАЗП в системе мобильной связи.
На Фиг.3 и 4 принимается, что прямой канал пакетных данных (F-PDCH) назначен мобильной станции А. Дополнительно, для удобства объяснения индексы последовательно назначаются временным слотом, как базовой станции (БС), так и мобильной станции (МС), начиная с 0-го временного слота, начиная с определенного момента времени. Помимо этого, на Фиг.3 и 4 А(х,у) имеет следующее значение. Заштрихованные части обозначают данные, предназначенные для передачи мобильной станции А. Помимо этого 'х' обозначает канал АЗП, а 'у' обозначает индекс, различающий шаблон ПИ для одного и того же кодированного пакета. На этой основе приведено описание Фиг.3, где задержка ACK/NAK составляет 1 слот.
Согласно фиг.3 данные от базовой станции передаются на мобильную станцию в 0-ом слоте. Затем мобильная станция А принимает пакетные данные в том же самом слоте. На Фиг.3 и 4 базовая станция и мобильная станция имеют различные начальные точки слота в силу задержки распространения между мобильной станцией и базовой станцией по абсолютной шкале времени. Здесь базовая станция передает пакетные данные и сигнал управления пакетными данными по прямому каналу пакетных данных (F-PDCH) и прямому каналу управления пакетных данных (F-PDCCH), соответственно. Затем мобильная станция А определяет, имеют ли данные ошибку, в течение времени обработки, составляющего один слот, и после этого передает сигнал АСК или NAK на базовую станцию. "Время обработки" относится ко времени, требуемому для выполнения демодуляции и декодирования принятых пакетных данных для одного слота, и передачи результата в следующем слоте по обратному каналу (R-АСКСН). Например, на Фиг.3 передается сигнал NAK. Затем базовая станция принимает сигнал NAK в 3-ем слоте, а в 4-ом слоте планирует повторную передачу искаженных данных. После этого базовая станция передает данные с другим шаблоном для того же кодированного пакета согласно результату планирования.
Ниже приведено описание Фиг.4, где задержка ACK/NAK составляет 2 слота. На Фиг.4 предполагается, что ошибка имела место в первом пакете данных среди пакетов данных, переданных от базовой станции на мобильную станцию А, и описание фокусируется на первом пакете данных. Поскольку время задержки составляет 2 слота, базовая станция непрерывно передает пакетные данные на мобильную станцию А в 0-ом слоте, 1-ом слоте и 2-ом слоте. Затем мобильная станция проверяет ошибки в данных, переданных в 0-ом слоте в течение периода от 1-го до 2-го слотов, проверяет ошибку в данных, переданных в 1-ом слоте в течение периода от 2-го по 3-ий слоты, и проверяет ошибку в данных, переданных во 2-ом слоте в течение периода от 3-го по 4-ый слоты. ACK/NAK для данных, принятых в 0-ом слоте, передаются в 3-ем слоте, ACK/NAK для данных, принятых в 1-ом слоте, передаются в 4-ом слоте, ACK/NAK для данных, принятых в 2-ом слоте, передаются в 5-ом слоте. Если базовая стация принимает в 4-ом слоте, NAK для пакетных данных, переданных в 0-ом слоте, базовая станция выполняет в следующем слоте повторную передачу кодированного пакета, переданного в нулевом слоте. Повторно переданные пакетные данные представляют собой тот же самый пакет, что и переданный ранее пакет, но имеет другой шаблон ПИ.
Как видно из Фиг.3 и 4, мобильная станция выполняет синхронную передачу ACK/NAK, при которой мобильная станция должна передать АСК или NAK для принятого пакета по истечении 1-г слота или 2-х слотов. Базовая станция выполняет асинхронную передачу ACK/NAK, при которой базовая станция может передать пакет в любом слоте после приема ACK/NAK для пакета, уже переданного мобильной станцией для того же канала АЗП.
Дополнительно, на Фиг.3 и 4 показана 1-канальная операция АЗП и 4-канальная операция АЗП, соответственно. При 1-канальной операции АЗП по Фиг.3 при передаче данных на одну мобильную станцию используется только часть ресурсов базовой станции, снижая скорость передачи пакетных данных соответствующей мобильной станцией. Напротив, при 4-канальной операции АЗП по Фиг.4 одна мобильная станция может использовать все ресурсы базовой станции и, тем самым, соответствующая мобильная станция может получить максимальную скорость передачи пакетных данных.
Как описано выше, возможен быстрый ответ АЗП и обработка АЗП путем перемещения управления АЗП, которое выполнялось на традиционном верхнем уровне, на уровень мультиплексирования. Однако это является всего лишь логическим решением в стандарте, а приведенные ниже проблемы возникают при реальном осуществлении.
Во-первых, в настоящее время большинство систем реализует верхний уровень, включающий в себя уровень мультиплексирования при помощи программных средств, загруженных в центральное процессорное устройство (ЦПУ). Однако в случае мобильной станции ее ЦПУ не обладает высокой скоростью обработки и производительностью. Следовательно, при реализации протокола ГАЗП, требующего от ЦПУ быстрого ответа, может произойти перегрузка ЦПУ. В результате мобильная станция может оказаться не способной выполнять ее обычные операции. В частности, такая проблема является большим препятствием для осуществления, если потребление мощности мобильной станцией является ограничивающим фактором при реализации системы.
Во-вторых, прерывание передачи кодированных данных и задержка обработки вследствие этого прерывания, что является следствием перегрузки ЦПУ, должны быть уменьшены при обработке высокоскоростных передаваемых данных. Следовательно, необходимо рассмотреть способ уменьшения прерываний обработки данных, которые могут происходить каждые 1,25 мсек.
В-третьих, для поддержки N-канального ГАЗП требуется N независимых контроллеров ГАЗП. Следовательно, при увеличении N количество контроллеров ГАЗП также возрастает, вызывая увеличение потребления мощности и сложности. Таким образом, при реализации количество контроллеров ГАЗП должно быть минимизировано.
В-четвертых, для поддержки N-канального ГАЗП требуются N независимых турбо декодеров. Следовательно, при увеличении N количество турбо декодеров также возрастает, вызывая увеличение потребления мощности и сложности. Таким образом, при реализации количество турбо декодеров должно быть минимизировано.
В-пятых, согласно стандарту, задержки ACK_DELAY=1 слот и ACK_DELAY=2 слота, описанные со ссылками на Фиг.3 и 4, являются исключительными опциями. Однако при реализации мобильной станции рассматривается структура для изменения тактовой частоты мобильной станции посредством выборочного деления/умножения тактовой частоты для понижения потребления мощности, следовательно, должна быть разработана структура мобильной станции, обеспечивающая возможность использования всех задержек ACK_DALAY в одной мобильной станции.
В-шестых, в отличие от традиционного трафика данных кодированный пакет, который представляет собой блок данных, передаваемый по прямому каналу пакетных данных (F-PDCH), может изменять свою схему передачи каждые 1,25 мсек. Следовательно, требуется новая структура для передачи каждые 1,25 мсек информации о структуре канала, которая передается один раз во время установления канала передачи данных.
Наконец, другая управляющая информация, необходимая для использования в мобильной станции, передается базовой станцией по прямому каналу управления пакетных данных (F-PDCCH), представляющему собой канал управления трафиком. Следовательно, мобильная станция должна эффективно выполнять операцию обнаружения управляющей информации и передавать обнаруженную управляющую информацию на верхний уровень за короткое время.
Сущность изобретения
Таким образом, задачей настоящего изобретения является создание устройства и способа, решающих проблемы традиционной технологии.
Также задачей настоящего изобретения является создание устройства и способа для уменьшения загрузки ЦПУ.
Кроме того, задачей настоящего изобретения является создание устройства и способа для уменьшения потребления мощности мобильной станцией в устройстве управления ГАЗП.
Также задачей настоящего изобретения является создание устройства и способа для уменьшения загрузки ЦПУ, обусловленной максимальной тактовой частотой в устройстве управления ГАЗП.
Также задачей настоящего изобретения является создание устройства и способа для уменьшения времени обработки данных в устройстве управления ГАЗП.
Также задачей настоящего изобретения является создание простого устройства управления и способа, которые не зависят от количества каналов, если N-канальная операция ГАЗП поддерживается в устройстве управления ГАЗП.
Кроме того, задачей настоящего изобретения является создание устройства управления и способа, позволяющих избежать увеличения сложности, связанного с количеством каналов в устройстве управления ГАЗП.
Также задачей настоящего изобретения является создание устройства и способа для обработки всех принятых пакетов вне зависимости от количества каналов с использованием небольшого количества турбо декодеров.
Задачей настоящего изобретения также является создание устройства и способа, поддерживающих задержки как ACK_DELAY=1 слот, так и ACK_DELAY=2 слота.
Также задачей настоящего изобретения является создание устройства и способа для управления вычислением и установкой параметров канала управления, генерируемых в каждом слоте после начальной установки канала пакетных данных (PDCH).
Также задачей настоящего изобретения является создание устройства и способа для вычисления и модификации параметров демодуляции и декодирования канала трафика в мобильной системе связи.
Задачей настоящего изобретения также является создание устройства и способа для быстрой передачи управляющей информации канала управления трафиком на верхнем уровне.
Для решения вышеперечисленных и других задач предлагается устройство декодирования управляющего сообщения, принимаемого по каналу управления пакетных данных, демодуляции и декодирования пакетных данных согласно результату декодирования каналу управления пакетных данных, генерации результата декодирования в виде сигнала ответа и передачи сигнала ответа, в системе мобильной связи, которая одновременно передает управляющее сообщение и пакетные данные по каналу пакетных данных, и поддерживает гибридный автоматический запрос повторной передачи (ГАЗП). Устройство включает в себя физический уровень, включающий в себя декодер для декодирования управляющего сообщения, принятого по каналу управления пакетных данных, демодулятор для демодуляции пакетных данных, принятых по каналу пакетных данных, и турбо декодер для декодирования немодулированных пакетных данных; и контроллер ГАЗП физического уровня для определения, требуется ли демодуляция и декодирование принятых пакетных данных, в зависимости от результата декодирования управляющего сообщения, выдачи декодированного управляющего сообщения в демодулятор и турбо декодер во время демодуляции и декодирования принятых пакетных данных, управления выдачей сигнала ответа согласно результату декодирования пакетных данных и передачи пакетных данных после турбо декодирования на верхний уровень.
Контроллер ГАЗП физического уровня включает в себя конечный автомат ГАЗП для управления переходом между следующими состояниями: начальным состоянием для инициализации параметров во время ожидания приема управляющего сообщения по каналу управления пакетных данных, посланного с физического уровня, состоянием декодирования для декодирования управляющего сообщения, состоянием управления для вычисления результата декодирования, состоянием демодуляции для демодуляции пакетных данных из канала пакетных данных, состоянием декодирования для турбо декодирования демодулированных пакетных данных и состоянием ответа для передачи результата турбо декодирования; и секцию функции состояний для управления переходом между состояниями конечного автомата ГАЗП в зависимости от результата обработки на физическом уровне.
Помимо этого, устройство содержит процессор маршрута обработки данных для управления маршрутом обработки данных, принятых по каналу пакетных данных.
Помимо этого, устройство включает в себя контроллер выходного буфера для управления выходным буфером физического уровня, который сохраняет данные, полученные при демодуляции и декодировании данных, принятых по каналу пакетных данных.
Предпочтительно, конечный автомат ГАЗП является сдвоенным.
Если время задержки ответа составляет 2 слота, каждый из сдвоенных конечных автоматов ГАЗП альтернативно осуществляет управление переходом между состояниями в течение 2 слотов для данных, принятых по каналу пакетных данных.
Если время задержки ответа составляет 2 слота, конечный автомат ГАЗП управляет переходом в состояние ожидания для ожидания завершения турбо декодирования турбо декодером физического уровня на время работы турбо декодера.
Секция функции состояний включает в себя процессоры первого состояния для выполнения операций управления соответствующих сдвоенных конечных автоматов ГАЗП в начальном состоянии, процессор второго состояния для выполнения операций управления конечных автоматов ГАЗП в состоянии управления; процессор третьего состояния для выполнения операций управления конечных автоматов ГАЗП в состоянии демодуляции; процессор четвертого состояния для выполнения операций управления конечных автоматов ГАЗП в состоянии ожидания; процессор пятого состояния для выполнения операций управления конечных автоматов ГАЗП в состоянии декодирования и процессоры шестого состояния для выполнения операций соответствующих конечных автоматов ГАЗП в состоянии ответа.
Физический уровень содержит один турбо декодер канала данных.
Для решения вышеперечисленных и других задач предлагается способ управления операцией приема пакетных данных и управляющего сообщения на физическом уровне для декодирования управляющего сообщения, принятого по каналу управления пакетных данных, демодуляции и декодирования пакетных данных согласно результату декодирования канала управления пакетных данных, генерации результата декодирования в качестве сигнала ответа и передачи сигнала ответа, и контроллер гибридного автоматического запроса повторной передачи (ГАЗП), входящий в состав физического уровня, в мобильной системе связи, одновременно передающей управляющее сообщение по каналу управления пакетных данных и пакетные данные по каналу пакетных данных и поддерживающей гибридный автоматический запрос повторной передачи. Способ включает в себя этапы: (а) инициализации параметров контроллера ГАЗП на физическом уровне во время инициализации, и при приеме управляющего сообщения управления декодированием принятого управляющего сообщения; (b) вычисления параметра управляющего сообщения согласно результату декодирования канала управления пакетных данных и выполнения протокола быстродействующего ГАЗП; (с) управления демодуляцией пакетных данных, принятых по каналу пакетных данных согласно вычисленному параметру; (d) управления турбо декодированием немодулированных данных согласно вычисленному параметру; и (е) передачи результата проверки ошибок данных после турбо декодирования.
Помимо этого, способ включает в себя этап отмены выполнения последующих состояний и возврата на этап (а), в случае, если вычисленный параметр является запрещенным параметром.
Помимо этого, способ включает в себя этапы определения, является ли параметр сообщением управления режимом удержания/переключения сотовой ячейки, если вычисленный параметр является запрещенным параметром; и передачи сообщения на верхний уровень, если параметр является сообщением управления режимом удержания/переключения сотовой ячейки.
Помимо этого, способ включает в себя этап перехода в начальное состояние в случае, если параметр не является сообщением управления режимом удержания/переключения сотовой ячейки.
Помимо этого, способ включает в себя этап ожидания завершения работы турбо декодера канала данных и последующего перехода к этапу (d), в случае, если турбо декодер канала данных физического уровня используется.
Краткое описание чертежей
Вышеперечисленные и другие задачи, признаки и преимущества настоящего изобретения поясняются в нижеследующем подробном описании, иллюстрируемом прилагаемыми чертежами, на которых представлено следующее:
Фиг.1 - блок-схема, иллюстрирующая отношение между верхним уровнем и физическим уровнем для обработки автоматического запроса повторной передачи (АЗП) согласно предшествующему уровню техники;
Фиг.2 - блок-схема, иллюстрирующая отношение между верхним уровнем и физическим уровнем для улучшенной быстрой (физической) обработки гибридного автоматического запроса повторной передачи (ГАЗП);
Фиг.3 - временная диаграмма, иллюстрирующая соотношение между базовой станцией и мобильной станцией для задержки ACK/NAK=1 слот в ГАЗП в мобильной системе связи;
Фиг.4 - временная диаграмма, иллюстрирующая соотношение между базовой станцией и мобильной станцией для задержки ACK/NAK=2 слота в ГАЗП в мобильной системе связи;
Фиг.5 - блок-схема, иллюстрирующая интерфейс между периферийными блоками, связанными с контроллером ГАЗП, согласно варианту осуществления настоящего изобретения;
Фиг.6 - блок-схема, иллюстрирующая связь между конечным автоматом ГАЗП и секцией функции состояний в контроллере ГАЗП согласно варианту осуществления настоящего изобретения;
Фиг.7 - диаграмма перехода состояний, иллюстрирующая контроллер ГАЗП согласно варианту осуществления настоящего изобретения;
Фиг.8 - временная диаграмма работы, иллюстрирующая первый или второй конечные автоматы ГАЗП для задержки ACK/NAK=1 слот;
Фиг.9 - временная диаграмма работы, иллюстрирующая первый или второй конечные автоматы ГАЗП для задержки ACK/NAK=2 слота;
Фиг.10 - временная диаграмма активизации управления, иллюстрирующая первый или второй конечные автоматы ГАЗП в случае задержки ACK/NAK=1 слот согласно варианту осуществления настоящего изобретения;
Фиг.11 - временная диаграмма активизации управления, иллюстрирующая первый или второй конечные автоматы ГАЗП в случае задержки ACK/NAK=2 слота согласно варианту осуществления настоящего изобретения;
Фиг.12 - временная диаграмма перехода состояний, иллюстрирующая первый конечный автомат ГАЗП для задержки ACK/NAK=1 слот согласно варианту осуществления настоящего изобретения;
Фиг.13 - временная диаграмма перехода состояний, иллюстрирующая первый конечный автомат ГАЗП и второй конечный автомат ГАЗП для задержки ACK/NAK=2 слота согласно варианту осуществления настоящего изобретения;
Фиг.14 - блок-схема, иллюстрирующая потоки команд управления между контроллером ГАЗП и его периферийными устройствами согласно варианту осуществления настоящего изобретения; и
Фиг.15 - блок-схема, иллюстрирующая процедуру управления соответствующими состояниями контроллера ГАЗП во время приема данных согласно варианту осуществления настоящего изобретения.
Подробное описание предпочтительного варианта осуществления
Ниже подробно описан вариант осуществления настоящего изобретения со ссылками на чертежи. На чертежах одинаковые или сходные элементы обозначаются одинаковыми ссылочными позициями, даже если они изображены на различных чертежах. В нижеследующем описании подробное описание известных используемых функций и конфигураций опущено для большей ясности.
Ниже описаны устройство и способ, соответствующие настоящему изобретению, решающие вышеизложенные проблемы.
Во-первых, большинство систем реализуют верхний уровень, включающий в себя уровень мультиплексирования при помощи программных средств, загруженных в центральное процессорное устройство (ЦПУ). Поэтому, настоящее изобретение предлагает способ реализации контроллера гибридного автоматического запроса повторной передачи (ГАЗП) физического уровня, при помощи аппаратных средств для разрешения проблемы потребляемой мощности и проблемы максимума тактовой частоты мобильной станции и для уменьшения перегрузки ЦПУ. Если это может быть реализовано при помощи программных средств без влияния на его производительность вследствие высокой производительности ЦПУ или цифрового сигнального процессора (ЦСП), базовая структура контроллера ГАЗП, предлагаемая в варианте осуществления изобретения, может быть реализована при помощи программных средств. В данном описании настоящее изобретение будет описано, исходя из того, что контроллер ГАЗП реализован при помощи аппаратных средств.
Во-вторых, настоящее изобретение предоставляет возможность высокоскоростной обработки данных посредством уменьшения прерываний кодированных данных и задержки обработки вследствие указанных прерываний, обусловленных перегрузкой ЦПУ. С этой целью в контроллере ГАЗП отдельно установлен контроллер выходного буфера (КВБ). Контроллер выходного буфера принимает активное участие в операции передачи данных от декодера канала в ЦПУ (или хост). В частности, контроллер выходного буфера выполнен с возможностью управления временем хранения декодированных данных, перед этим выданных по запросу ЦПУ, и регулировки времени передачи данных таким образом, чтобы это удовлетворяло минимальному интервалу прерывания передачи, желательному для ЦПУ.
В-третьих, для поддержки N-канального ГАЗП требуется N независимых быстродействующих контроллеров ГАЗП. Однако вариант осуществления настоящего изобретения предлагает структуру, выполненную с возможностью обработки всех получаемых пакетов вне зависимости от количества каналов путем использования двух контроллеров ГАЗП. Следовательно, можно предотвратить возрастание потребления мощности и сложности безотносительно к возрастанию количества каналов. С этой целью структура включает в себя два конечных автомата: нечетный конечный автомат и четный конечный автомат и также имеет контроллер, управляющий конечными автоматами.
В-четвертых, для поддержки N-канального ГАЗП требуется N независимых быстродействующих турбо декодеров. Однако вариант осуществления настоящего изобретения предлагает структуру, выполненную с возможностью обработки всех получаемых пакетов вне зависимости от количества каналов путем использования одного турбо декодера. Следовательно, можно уменьшить потребление мощности и сложность схемы безотносительно к возрастанию количества каналов. С этой целью вариант осуществления настоящего изобретения предлагает способ, в котором контроллер ГАЗП адаптивно определяет/управляет стартовым сигналом и сигналом остановки для декодирования единственным турбо декодером. Кроме этого, в структуре в каждый конечный автомат добавлено "состояние ожидания".
В-пятых, вариант осуществления настоящего изобретения реализует контроллер ГАЗП, поддерживающий как задержку ACK_DELAY=1 слот, так и задержку ACK_DELAY=2 слота. Поскольку при реализации мобильной станции учитывается структура для изменения тактовой частоты мобильной станции при помощи выборочного деления/умножения тактовой частоты для понижения потребления мощности, в контроллере ГАЗП предусмотрены конечный автомат и функция состояний для поддержки двух режимов, в которых все ACK_DELAY могут использоваться в одной мобильной станции.
В-шестых, в отличие от традиционного трафика данных кодированный пакет, который представляет собой блок данных, передаваемый через прямой канал пакетных данных (F-PDCH), может изменять схему своей передачи каждые 1,25 мсек. Следовательно, обычно ЦПУ участвует только в начальной установке таким образом, чтобы выдавать, каждые 1,25 мсек, информацию о структуре канала, которая передается один раз во время установки канала данных. Дополнительно, в контроллере ГАЗП выполняется вычисление и установка параметров канала управления, генерируемых в каждом слоте, и вычисление и модификация параметров для демодуляции и декодирования канала трафика.
В-седьмых, управляющая информация, необходимая для использования в мобильной станции, передаваемая базовой станцией по прямому каналу управления пакетных данных (F-PDCCH), который является каналом управления трафиком, обнаруживается и затем передается на верхний уровень ЦПУ за короткое время. Дополнительно, результат обнаружения сообщения отражается в конечном автомате, и согласно этому определяется функция состояний.
Функционирование контроллера ГАЗП
При приеме пакетных данных EV-DV (прямая линия связи RC-10) контроллер ГАЗП управляет работой каждого блока, относящегося к принятым пакетным данным. Каждый блок, относящийся к приему пакетных данных, работает под управлением контроллера ГАЗП, и после завершения соответствующей операции информирует контроллер ГАЗП о завершении соответствующей операции. Контроллер ГАЗП выполняет следующую операцию, используя информацию о завершении операции от каждого блока. Дополнительно, контроллер ГАЗП сохраняет входную информацию и внутреннюю информацию от каждого блока в своих регистрах. Посредством этого контроллер ГАЗП может отслеживать осуществление операции ГАЗП. Управление каждым блоком, выполняемое контроллером ГАЗП, главным образом, представляет собой временное управление для выполнения операции ГАЗП в течение заданного времени, и не включает в себя управление операциями, присущими каждому блоку. Дополнительно, контроллер ГАЗП определяет, выполняется ли операция в нормальном режиме, или операция выполняется в аномальном режиме, используя информацию приема и внутреннюю информацию для прямого канала управления пакетных данных (F-PDCCH). Контроллер ГАЗП функционирует, основываясь на результате определения. Работа в аномальном режиме является следствием ошибки состояния радиоканала и направлена на повышение эффективности приема данных.
Типичными функциями контроллера ГАЗП согласно варианту осуществления настоящего изобретения являются следующие:
(1) Контроллер ГАЗП определяет, работает ли он в нормальном режиме или аномальном режиме согласно сообщению, принятому по каналу F-PDCCH, и внутренней информации контроллера ГАЗП.
(2) Контроллер ГАЗП управляет операциями демодуляции и турбо декодирования для канала F-PDCH согласно режиму работы.
(3) Контроллер ГАЗП определяет информацию (ACK/NAK или Silence), предназначенную для передачи по восходящему каналу ответа (R-ACKCH).
(4) Контроллер ГАЗП генерирует прерывание для верхнего уровня для передачи принятых данных в выходной буфер турбо декодера.
(5) Контроллер ГАЗП непрерывно сохраняет и обновляет информацию, относящуюся к каждому каналу автоматического запроса повторной передачи (АЗП)
(6) Контроллер ГАЗП поддерживает максимум 4 канала АЗП.
(7) Контроллер ГАЗП поддерживает все операции управления в случае задержки ACK/NAK, составляющей 1 слот и 2 слота.
Фиг.5 иллюстрирует блок-схему контроллера ГАЗП, выполненного с возможностью выполнения операции верхнего уровня на физическом уровне, и интерфейс между периферийными блоками, подсоединенными к контроллеру ГАЗП. Со ссылкой на Фиг.5 ниже описаны блоки, соединенные с контроллером ГАЗП, согласно варианту осуществления настоящего изобретения, и внутренняя структура и работа контроллера ГАЗП.
Контроллер 300 ГАЗП включает в себя два конечных автомата ГАЗП (НКАГ/ЧКАГ) 310, регистр ГАЗП (HARQC_REG) 320, контроллер 330 функции состояний и пути прохождения данных и контроллер 340 выходного буфера. Работа ГАЗП управляется конечными автоматами 310 ГАЗП и контроллером 330 функции состояний и пути прохождения данных между элементами контроллера 300 ГАЗП. Выходной буфер, соединенный с турбо декодером 430 канала данных, описанный ниже, управляется контроллером 340 выходного буфера. Соединения сигнальных входов и выходов от контроллера 300 ГАЗП схематично показаны на Фиг.5. Т.е., выходные сигналы из конкретного внутреннего блока не показаны. Со ссылками на чертежи ниже приведено описание соответствующих внутренних структур и их связи с контроллером 300 ГАЗП, показанным на Фиг.5.
Контроллер 300 ГАЗП соединен с процессором (ЦПУ или хостом) 400 и может обмениваться данными через шину 450 данных и шину 460 адреса. Помимо этого, контроллер 300 ГАЗП может передавать сигнал прерывания процессору 400 через линию прерывания. Контроллер 300 ГАЗП соединен с декодером канала управления (PDCCH_DEC) 410 для декодирования данных, передаваемых по каналу управления пакетных данных, управляет операцией включения/выключения декодера 410 канала управления и предоставляет параметр декодирования для данных, передаваемых по каналу управления пакетных данных. Декодер 410 канала управления для декодирования данных в канале управления пакетных данных (PDCCH) декодирует данные в канале управления пакетных данных, исходя из параметра, полученного из контроллера 300 ГАЗП, и затем выдает декодированные данные в контроллер 300 ГАЗП вместе с сигналом завершения декодирования.
Контроллер 300 ГАЗП соединен с демодулятором канала данных (PDCH_DEMOD) 420 для демодуляции данных, передаваемых по каналу пакетных данных, управляет операцией включения/выключения демодулятора 420 канала данных и предоставляет параметры демодуляции и сигналы управления в демодулятор 420 канала данных. Затем демодулятор 420 канала данных демодулирует данные, передаваемые по каналу пакетных данных, выдает демодулированные данные в контроллер 300 ГАЗП и предоставляет данные системного времени в контроллер 300 ГАЗП.
Вариант осуществления настоящего изобретения обеспечивается контроллером, выполненным с возможностью работы в системе EV-DV. Данные, передаваемые из системы EV-DV, по существу перед передачей подвергаются турбо кодированию при помощи турбо кодера. Контроллер 300 ГАЗП соединен с турбо декодером канала данных (PDCH_TURBO) 430 для декодирования данных, передаваемых по каналу пакетных данных, и выполняет операцию включения/выключения турбо декодера 430 канала данных. Дополнительно, контроллер 300 ГАЗП выдает турбо декодеру 430 канала данных сигнал принудительной остановки, параметры турбо декодирования и сигналы управления, а также параметры управления буфером и сигналы управления. Затем турбо декодер 430 канала данных выполняет турбо декодирование данных в канале пакетных данных, исходя из различных параметров и сигналов управления, полученных от контроллера 300 ГАЗП, выдает в контроллер 300 ГАЗП сигнал завершения турбо декодирования, сигнал результата проверки с использованием ЦИК и сигнал статуса декодирования. Дополнительно, декодер 430 канала данных соединен с шиной данных и шиной адреса для сохранения и чтения данных в/из памяти (не показано). Контроллер 300 ГАЗП выполняет операцию управления выдачей данных, сохраненных в буфере, соединенном с турбо декодером 430, в процессор 400.
Контроллер 300 ГАЗП соединен с передатчиком сигнала ответа (RACK_TX) 440 и выполняет операции управления ACK/NAK и SILENCE над данными, принятыми по каналу пакетных данных согласно результату их декодирования. Дополнительно, передатчик 440 сигнала ответа выдает информацию о временных параметрах передачи в контроллер 300 ГАЗП.
Операции и состояния контроллера 300 ГАЗП описаны ниже со ссылкой на Таблицу 1.
Состояние, в котором контроллер ожидает получения PDCCH_DEC_DONE от PDCCH_DEC
Состояние, в котором контроллер ГАЗП вычисляет параметры для принятия решения "новый/продолжение" для подпакета, выделения управляющего сообщения и демодуляции PDCH
Состояние, в котором контроллер ГАЗП выполняет демодуляцию PDCH
Состояние, в котором контроллер ГАЗП ожидает освобождения турбо декодера
Состояние, в котором контроллер ГАЗП выдает сигнал начала декодирования и необходимые параметры в турбо декодер PDCH и ожидает завершения декодирования
Состояние, в котором контроллер ГАЗП передает ACK/NAK по обратному каналу после завершения турбо декодирования PDCH
В Таблице 1 соответствующие состояния S1, S2, S3, S4, S5 и S6 представляют состояния, определенные в порядке выполнения операции в конкретный момент времени в контроллере 300 ГАЗП, и затем выполняется следующая операция. Соответствующие состояния S1, S2, S3, S4, S5 и S6 имеют взаимные связи между предыдущей операцией и последующей операцией. Дополнительно Таблица 1 иллюстрирует состояния, необходимые в случае, если задержка ACK/NAK составляет 1 слот, и состояния, необходимые в случае, если задержка ACK/NAK составляет 2 слота. Ниже более подробно описаны соответствующие состояния по Таблице 1.
Первое состояние S1 является "начальным состоянием", которое выполняется при приеме сообщения канала управления пакетных данных, соответствующего MACID в управляющих данных, передаваемых по каналу управления пакетных данных (PDCCH), или принимается предопределенное управляющее сообщение, предназначенное для передачи от базовой станции в мобильную станцию. Когда контроллер 300 ГАЗП входит в первое состояние S1, он ожидает завершения декодирования управляющих данных, передаваемых по каналу управления пакетных данных. Это происходит потому, что демодулятор 420 канала данных может демодулировать данные в канале пакетных данных, используя управляющие данные канала управления пакетных данных. Дополнительно, контроллер 300 ГАЗП выполняет операцию инициализации регистра в первом состоянии S1 и затем переходит во второе состояние S2 после завершения декодирования канала управления пакетных данных.
Во втором состоянии S2 контроллер 300 ГАЗП вычисляет параметры для демодуляции канала пакетных данных, используя различные сообщения, полученные в качестве результата декодирования в первом состоянии S1. Второе состояние S2 соответствует 'состоянию управления ГАЗП'. Помимо этого, во втором состоянии S2 контроллер 300 ГАЗП выполняет протокол ГАЗП на физическом уровне. Т.е., во втором состоянии S2 контроллер 300 ГАЗП вычисляет уровень модуляции, необходимый для демодуляции, и номера кодовых каналов Уолша, и выдает результаты в демодулятор 420 канала данных. Дополнительно, контроллер 300 ГАЗП определяет во втором состоянии S2, является ли подпакет, принятый в первом состоянии S1 по каналу пакетных данных, согласно АКИД и EP_NEW, которые являются результатами декодирования канала управления пакетных данных, новыми данными (данными, передаваемыми первый раз) или повторно передаваемыми данными. Кроме этого, при обнаружении управляющего сообщения верхнего уровня (или сигнального сообщения) согласно результатам декодирования канала управления пакетных данных, контроллер 300 ГАЗП непосредственно назначает передачу ACK/NAK вне зависимости от другого процесса. Помимо этого, контроллер 300 ГАЗП выполняет во втором состоянии S2 проверку на недействительность, и в случае, если выясняется, что принято сообщение, которое базовая станция не могла передавать, контроллер 300 ГАЗП возвращается в первое состояние S1, являющееся начальным состоянием.
В третьем состоянии S3 контроллер 300 ГАЗП управляет демодулятором 420 канала данных для демодуляции данных, передаваемых по каналу управления пакетных данных. Третье состояние S3 является "состоянием демодуляции". В этом состоянии демодуляции параметр для демодуляции результата детектирования данных, передаваемых первый раз, или повторно передаваемых данных, детектированных АО втором состоянии S2, выдается в демодулятор 420 канала данных для демодуляции подпакета, передаваемого по каналу пакетных данных. Таким образом, контроллер 300 ГАЗП выдает параметры, необходимые для демодуляции, в демодулятор 420 канала данных и затем ожидает завершения демодуляции. При завершении демодуляции контроллер 300 ГАЗП переходит в четвертое состояние S4 или пятое состояние S5 согласно количеству слотов для задержки ACK/NAK.
В определенной ситуации контроллер 300 ГАЗП переходит в четвертое состояние S4. Четвертое состояние S4 является 'состоянием ожидания', в котором контроллер 300 ГАЗП ожидает, пока подпакет, полученный по предыдущему каналу пакетных данных, будет демодулирован конечными автоматами 310 ГАЗП, входящими в состав контроллера 300 ГАЗП. Указанное состояние управления должно удерживаться, только если задержка ACK/NAK составляет 2 слота, поскольку турбо декодер 430 канала данных должен декодировать новые данные в каждом слоте, только если задержка ACK/NAK составляет 1 слот. Однако, если задержка ACK/NAK составляет 2 слота, турбо декодер 430 канала данных может производить декодирование данных, принятых в предыдущем слоте. В этом случае, контроллер 300 ГАЗП должен ожидать завершения работы турбо декодера 430 канала данных. Более того, поскольку в варианте осуществления настоящего изобретения применяется только один турбо декодер 430 канала данных, это состояние с необходимостью требуется, если задержка ACK/NAK составляет 2 слота, для предотвращения наложения данных. Таким образом, используя четвертое состояние S4, можно обрабатывать множество каналов пакетных данных, используя один турбо декодер даже в случае, если задержка ACK/NAK составляет 2 слота. Контроллер 300 ГАЗП переходит в пятое состояние S5, если турбо декодер 430 канала данных становится доступным в то время, как контроллер 300 ГАЗП ожидает в четвертом состоянии S4.
В пятом состоянии S5 контроллер 300 ГАЗП управляет турбо декодированием. Пятое состояние соответствует 'состоянию декодирования'. Т.е, в пятом состоянии S5 контроллер 300 ГАЗП предоставляет различную информацию, необходимую для турбо декодирования в турбо декодер 430 канала данных. Информация, необходимая для турбо декодирования, может представлять собой размер кодированного пакета (КП) и АКИД. Контроллер 300 ГАЗП предоставляет вышеуказанную информацию в турбо декодер 430 канала данных и после этого ожидает завершения операции декодирования. Однако бывают случаи, в которых турбо декодирование выполняется чересчур длительное время, или должно быть выполнено турбо декодирование другой, более ранней информации. В этом случае, контроллер 300 ГАЗП может принудительно остановить турбо декодирование, выдав сигнал принудительной остановки. Контроллер 300 ГАЗП переходит в шестое состояние S6 при завершении или принудительном завершении турбо декодирования.
В шестом состоянии S6 контроллер 300 ГАЗП передает сигнал ответа (ACK/NAK) для принятого подпакета по обратному каналу согласно результату декодирования турбо декодера 430 канала данных. Таким образом, шестое состояние S6 является 'состоянием передачи сигнала ответа (ACK/NAK)'. Таким образом, контроллер 300 ГАЗП управляет передатчиком 440 сигнала ответа, и в качестве результата декодирования, в случае отсутствия ошибки, контроллер 300 ГАЗП передает АСК по обратному каналу. Напротив, если ошибка присутствует, контроллер 300 ГАЗП передает NAK по обратному каналу. Поскольку шестое состояние S6 является последним состоянием контроллера 300 ГАЗП, контроллер 300 ГАЗП переходит в первое состояние S1 после передачи результата декодирования и снова ожидает в начальном состоянии выполнения следующего состояния. Если задержка ACK/NAK составляет 2 слота, контроллер 300 ГАЗП включает в себя два конечных автомата 310 ГАЗП. В этом случае два конечных автомата 310 ГАЗП могут одновременно выполнять первое состояние S1 или шестое состояние S6. Однако другие состояния S2, S3, S4 и S5 никогда не выполняются одновременно.
Ниже дано описание внутренней структуры контроллера 300 ГАЗП. На фиг.6 представлена блок-схема, иллюстрирующая связи между конечным автоматом ГАЗП и секцией функции состояний в контроллере ГАЗП согласно варианту осуществления настоящего изобретения. Приведено детальное описание связей между конечным автоматом ГАЗП и секцией функции состояний со ссылкой на Фиг.6 согласно варианту осуществления настоящего изобретения.
Согласно фиг.6 секция 335 функции состояний представляет секцию функции состояний, отдельную от контроллера 330 функции состояний и пути прохождения данных по Фиг.5. Конечные автоматы 310 ГАЗП управляют переходом состояний с первого состояния S1 по шестое состояние S6 согласно диаграмме управления ГАЗП. Т.е., конечные автоматы 310 ГАЗП выдают сигналы перехода состояний. Секция 335 функции состояний управляет другими блоками (локальными функциональными блоками) 401...403 для управления операциями, выполняемыми в соответствующих состояниях. Другие блоки 401...403, показанные на Фиг.6, могут включать в себя процессор 400 и декодер 410 канала управления для передатчика 440 сигнала ответа по Фиг.5, исключая контроллер 300 ГАЗП, и также может включать в себя другие блоки, не показанные на Фиг.5. Т.е., секция 335 функции состояний получает сигналы состояний, выдаваемые конечными автоматами 310 ГАЗП, и управляет операциями в зависимости от сигнала состояний.
Конечные автоматы 310 ГАЗП получают информацию о текущих состояниях и информацию о том, составляет ли задержка ACK/NAK 1 слот или 2 слота, и также получает сигнал Fi_DONE завершения операции от секции 335 функции состояний. Поскольку в случае, если задержка ACK/NAK составляет 2 слота, предусмотрено два конечных автомата 310 ГАЗП, сигнал завершения операции подается в соответствующие конечные автоматы 310 ГАЗП. Приняв сигнал завершения операции, конечные автоматы 310 ГАЗП выдают сигналы следующего состояния. Здесь, поскольку в случае задержки ACK/NAK, равной 2 слотам, предусмотрены два конечных автомата 310, соответствующие конечные автоматы 310 ГАЗП выдают соответствующую информацию о состояниях. Дополнительно, конечный автомат 310 ГАЗП выдает сигнал готовности состояния Si_EN в секцию 335 функции состояний, чтобы выполнять операцию управления согласно информации о состоянии и соответствующему состоянию.
Таким образом, конечные автоматы ГАЗП отличаются по количеству и принципу работы согласно тому, составляет ли задержка ACK/NAK 1 слот или 2 слота. Ниже описан вариант осуществления настоящего изобретения в случае, если количество конечных автоматов ГАЗП составляет 1 или 2.
Если задержка ACK/NAK составляет 1 слот, предусмотрен один конечный автомат 310 ГАЗП, поэтому в секцию 335 функции состояний выдается только один сигнал готовности состояния. Также только один сигнал завершения операции выдается из секции 335 функции состояний в конечный автомат 310 ГАЗП. Однако, если задержка ACK/NAK составляет 2 слота, предусмотрены 2 конечных автомата 310 ГАЗП. В этом случае конечные автоматы 310 ГАЗП разделены на первый конечный автомат ГАЗП (или нечетный конечный автомат ГАЗП (НКАГ)) и второй конечный автомат ГАЗП (или четный конечный автомат ГАЗП (ЧКАГ)). Первый и второй конечные автоматы ГАЗП имеют одну и ту же структуру, и по сравнению с вариантом, когда предусмотрен только один конечный автомат ГАЗП, дополнительно предусмотрено четвертое состояние S4, как показано в Таблице 1. Т.е., первый и второй конечные автоматы ГАЗП выполняют те же самые операции, в которых они генерируют те же самые выходные сигналы в ответ на те же самые входные сигналы. Однако, это не означает, что два конечных автомата ГАЗП являются идентичными в процессе смены состояний. Т.е., применяемые НКАГ и ЧКАГ изменяются согласно задержке ACK/NAK, как показано в Таблице 2, ниже.
Если это реализовано в мобильной станции, для использования задержки ACK/NAK=1 слот и задержки ACK/NAK=2 слота предусмотрены 2 конечных автомата ГАЗП, а для задержки ACK/NAK=1 слот используется только один конечный автомат ГАЗП, и четвертое состояние S4 предпочтительно исключается.
Ниже описаны переходы соответствующих состояний со ссылкой на Фиг.7, где показана диаграмма перехода состояний контроллера ГАЗП согласно варианту осуществления настоящего изобретения.
Первое состояние S1 представляет состояние, в котором контроллер 300 ГАЗП ожидает завершения декодирования канала управления пакетных данных после выполнения инициализации регистра, как описано в связи с Таблицей 1. На Фиг.7 этап 500 представляет состояние, в котором контроллер 300 ГАЗП ожидает, находясь в состоянии S1. Если сигнал завершения декодирования канала управления пакетных данных принимается от секции 335 функции состояний в течение данного состояния ожидания, то на этапе 502 происходит переход во второе состояние S2. Когда происходит переход во второе состояние S2, конечный автомат 310 ГАЗП вычисляет на этапе 506 такие параметры, как уровень модуляции, необходимый для демодуляции, и код Уолша, используя результат декодирования канала пакетных данных в первом состоянии S1. Более того, во втором состоянии S2 вычисленные параметры проверяются на ошибки. Согласно результату проверки на ошибки, если обнаружена ошибка параметра, конечный автомат 310 ГАЗП переходит к этапу 504, где он отмечает наличие ошибки параметра, и затем переходит обратно в первое состояние S1 (этап 500). Напротив, в случае отсутствия ошибок вычисленных параметров конечный автомат 310 ГАЗП переходит к этапу 508, где он обнаруживает действительный параметр канала пакетных данных, выдает обнаруженный параметр в секцию 335 функции состояний и затем переходит в третье состояние S3. Согласно результату вычисления параметра на этапе 506, если принятое сообщение является сигнальным сообщением, относящимся к управлению режимом удержания/переключения сотовой ячейки (УРУ/ПС), конечный автомат 310 ГАЗП переходит не в третье состояние S3, а в шестое состояние S6.
В случае перехода в третье состояние S3 конечный автомат 310 ГАЗП демодулирует канал пакетных данных на этапе 512. Такая демодуляция управляется секцией 335 функцией состояний, а конечный автомат 310 ГАЗП ожидает завершения демодуляции. После этого, если демодуляция завершена, конечный автомат 310 ГАЗП выполняет переход состояний согласно задержке ACK/NAK=1 слот или 2 слота. Если задержка ACK/NAK составляет 1 слот, конечный автомат 310 ГАЗП переходит к этапу 516, где он переходит в пятое состояние S5. Если задержка ACK/NAK составляет 2 слота, конечный автомат 310 ГАЗП переходит к этапу 514, где он переходит в четвертое состояние S4.
В случае перехода в четвертое состояние S4 первый или второй конечный автомат ГАЗП находится в состоянии ожидания, поскольку турбо декодер 430 канала данных используется не данным конечным автоматом ГАЗП, а другим конечным автоматом ГАЗП. Когда другой конечный автомат ГАЗП прекращает использование турбо декодера 430 канала данных, первый или второй конечный автомат ГАЗП переходит в пятое состояние S5 на этапе 520.
В случае перехода из третьего состояния S3 или четвертого состояния S4 в пятое состояние S5, конечный автомат 310 ГАЗП ожидает завершения турбо декодирования на этапе 522. При этом турбо декодирование управляется секцией 335 функции состояний. Если сигнал завершения турбо декодирования принимается от секции 335 функции состояний, конечный автомат 310 ГАЗП переходит к этапу 524, где он переходит в шестое состояние S6. Шестое состояние S6 представляет этап, на котором передается ACK/NAK, как описано в связи с Таблицей 1. При переходе в шестое состояние S6 секция 335 функции состояний управляет передатчиком 440 сигнала ответа для передачи ACK или NAK по обратному каналу согласно результату турбо декодирования. Если передача ACK или NAK завершена, секция 335 функции состояний выдает сигнал завершения передачи ACK/NAK в конечный автомат 310 ГАЗП. В результате конечный автомат 310 ГАЗП переходит к этапу 528, после чего он остается в состоянии S1.
Ниже описаны временные параметры конечного автомата 310 ГАЗП, исходя из задержки ACK/NAK со ссылками на чертежи. На фиг.8 представлена временная диаграмма работы первого или второго конечного автомата ГАЗП при задержке ACK/NAK=1 слот, а на Фиг.9 - временная диаграмма работы первого или второго конечного автомата ГАЗП при задержке ACK/NAK=2 слота.
Со ссылкой на Фиг.8 описан случай, когда задержка ACK/NAK составляет 1 слот. Согласно Фиг.8, если операция декодирования k-го канала управления пакетных данных (PDCCH) завершена, сигнал завершения декодирования передается в первый конечный автомат ГАЗП НКАГ. Первый конечный автомат ГАЗП НКАГ затем управляет переходом состояний в ответ на k-ый сигнал. Если сигнал завершения декодирования (K+1)-ого канала управления пакетных данных принимается вновь в следующем слоте, в ответ на это первый конечный автомат ГАЗП НКАГ управляет следующим переходом состояний. Т.е., если задержка ACK/NAK составляет 1 слот, второй конечный автомат ГАЗП ЧКАГ не выполняет операций.
Со ссылкой на Фиг.9 описан случай, когда задержка ACK/NAK составляет 2 слота. Согласно Фиг.9, если операция декодирования k-го канала управления пакетных данных (PDCCH) завершена, сигнал завершения декодирования передается в первый конечный автомат ГАЗП НКАГ. Первый конечный автомат ГАЗП НКАГ затем управляет переходом из первого состояния S1 в шестое состояние S6 для периода 2-слота, т.е. для K-ого и (K+1)-го слотов. Дополнительно, в каждом состоянии операции управляются секцией 335 функций состояний согласно сигналу перехода состояний от первого конечного автомата ГАЗП НКАГ. При завершении операции декодирования (K+1)-ого канала управления пакетных данных (PDCCH), во второй конечный автомат ЧКАГ передается сигнал завершения декодирования. Следовательно, второй конечный автомат ГАЗП ЧКАГ управляет переходом с первого состояния S1 по шестое состояние S6 в течение периода 2 слота, т.е. для слотов (К+1) и (К+2). Как показано на Фиг.9, если сигнал по каналу управления пакетных данных не принимается в (К+2) слоте, первый конечный автомат ГАЗП НКАГ продолжает находиться в состоянии ожидания. После этого, в случае, если сигнал по каналу управления пакетных данных принимается в (К+3)-м слоте, работает второй конечный автомат ГАЗП ЧКАГ. Первый конечный автомат ГАЗП НКАГ и второй конечный автомат ГАЗП ЧКАГ работают в указанном порядке.
Для того чтобы первый конечный автомат ГАЗП НКАГ и второй конечный автомат ГАЗП ЧКАГ работали со смещением в один слот, как показано на Фиг.9, необходим сигнал управления операциями. Такой сигнал управления не может генерироваться конечным автоматом 310 ГАЗП или секцией 335 функции состояний. Следовательно, требуется отдельное устройство. Необходимые для этого входные сигналы включают в себя информацию о задержке ACK/NAK, сигнал о синхронизации SYNC_125 и системное время SYS_TIME_125[0]. Если из входных сигналов устанавливается, что задержка ACK/NAK составляет 2 слота, генерируются сигналы ODD_125 и EVEN_125, имеющие возможность выбора первого конечного автомата ГАЗП НКАГ или второго конечного автомата ГАЗП ЧКАГ синхронно с сигналом синхронизации и системным временем.
На фиг.10 представлена временная диаграмма управления активизацией первого и второго конечных автоматов ГАЗП для задержки ACK/NAK=1 слот согласно настоящему варианту осуществления настоящего изобретения, а на Фиг.11 - временная диаграмма управления активизацией первого и второго конечных автоматов ГАЗП для задержки ACK/NAK=2 слот согласно настоящему варианту осуществления настоящего изобретения. Ниже подробно описаны временные диаграммы управления активизацией первого и второго конечных автоматов ГАЗП согласно варианту осуществления настоящего изобретения со ссылкой на Фиг.10 и Фиг.11.
На Фиг.10 и 11 типы выходных сигналов определяются значением задержки ACK/NAK, сигналом SYNC_125 синхронизации, указывающим на границу слота на этапе приема, и SYSM_TIME_125[0], который представляет собой младший значащий бит (LSB) системного времени в единицах 1,25 мсек. Сначала приведено описание Фиг.10. Как показано, если ACK_DELAY составляет 1 слот, сигнал ODD_125 выбора первого конечного автомата, подаваемый в первый конечный автомат ГАЗП НКАГ, и сигнал EVEN_125 выбора второго конечного автомата, подаваемый во второй конечный автомат ГАЗП ЧКАГ, выдаются в высоком состоянии и низком состоянии, соответственно. Это делается для разрешения выполнения операции перехода состояний только первому конечному автомату ГАЗП НКАГ и предотвращения выполнения перехода состояний вторым конечным автоматом ГАЗП ЧКАГ. Следовательно, сигнал системного времени SYS_TIME_125 попеременно переходит в высокое состояние и низкое состояние каждые 1,25 мсек, и сигнал SYNC_125 синхронизации также некоторое время находится в высоком состоянии в начальной точке слота 1,25 мсек.
Ниже со ссылкой на Фиг.11 описан случай задержки ACK/NAK, составляющей 2 слота. Как показано на Фиг.11, сигнал ODD_125 выбора первого конечного автомата, выдаваемый в первый конечный автомат ГАЗП НКАГ, меняется между низким состоянием и высоким состоянием каждые 1,25 мсек. Также, сигнал EVEN_125 выбора второго конечного автомата, выдаваемый во второй конечный автомат ГАЗП ЧКАГ, меняется между низким состоянием и высоким состоянием каждые 1,25 мсек. Дополнительно, сигнал ODD_125 выбора первого конечного автомата и сигнал EVEN_125 выбора второго конечного автомата всегда выдаются как взаимоисключающие состояния. Например, если сигнал ODD_125 выбора первого конечного автомата находится в высоком состоянии, то сигнал EVEN_125 выбора второго конечного автомата находится в низком состоянии, а если сигнал ODD_125 выбора первого конечного автомата находится в низком состоянии, то сигнал EVEN_125 выбора второго конечного автомата находится в высоком состоянии. Сигнал системного времени и сигнал синхронизации имеют такую же форму, что и соответствующие сигналы, показанные на Фиг.10.
В мобильной системе связи задержка ACK/NAK представляет собой полное время задержки системы. Следовательно, если задержка ACK/NAK составляет 1 слот, ACK_DELAY может составлять 0 в мобильной станции, а если задержка ACK/NAK составляет 2 слота, ACK_DELAY может составлять 1 в мобильной станции. В результате переход в следующее состояние может быть проиллюстрирован, как показано в Таблице 3 согласно текущим состояниям конечного автомата 310 ГАЗП и выходным сигналам секции 335 функции состояний.
В таблице 3 Fi (где i= от 1 до 6) обозначает выходной сигнал секции 335 функции состояний в i-ом состоянии. Например, F1_DONE обозначает выходной сигнал завершения операции секции 335 функции состояний в первом состоянии S1, и F2_DONE обозначает выходной сигнал завершения операции секции 335 функции состояний во втором состоянии S2. Дополнительно, ACK_DELAY обозначает время задержки в мобильной станции, а Х означает "не имеет значения".
Фиг.12 представляет собой временную диаграмму перехода состояний первого конечного автомата ГАЗП для задержки ACK/NAK=1 слот согласно варианту осуществления настоящего изобретения. Ниже приводится подробное описание операций перехода состояний первого конечного автомата ГАЗП для задержки ACK/NAK=1 слот со ссылкой на Фиг.12. На Фиг.12 состояние представляется OSi. Т.е., OS1 обозначает первое состояние S1, а OS2 обозначает второе состояние S2. Для обозначения состояний первого конечного автомата ГАЗП НКАГ состояния на чертеже обозначены OS1, OS2,....
В первом состоянии S1 первый конечный автомат ГАЗП НКАГ принимает сигнал канала управления пакетных данных и декодирует принятый сигнал канала управления пакетных данных. Следовательно, секция 335 функции состояний выдает сигнал F1_DONE в определенный момент времени t1. Первый конечный автомат ГАЗП НКАГ затем принимает его в момент времени t2 и переходит во второе состояние S2. Если сигнал F2_DONE выдается из секции 335 функции состояний во втором состоянии S2, первый конечный автомат ГАЗП НКАГ продолжает находиться во втором состоянии S2, возвращается в первое состояние S1 или переходит в третье состояние S3 или шестое состояние S6. Четыре типа перехода состояний выполняются, исходя из значений выходных сигналов секции 335 функции состояний, приведенных в Таблице 3. На Фиг.12 показан переход в третье состояние S3, являющийся наиболее частым случаем перехода, как описано ниже.
При переходе в третье состояние S3 первый конечный автомат ГАЗП НКАГ игнорирует другие сигналы, например F1_DONE, F2_DONE, получаемые от секции 335 функции состояний, если они есть, и определяет, выдается ли из секции 335 функции состояний сигнал F3_DONE. Если сигнал F3_DONE выдается из секции 335 функции состояний в момент времени t4, первый конечный автомат ГАЗП НКАГ переходит в пятое состояние S5, т.к. задержка ACK/NAK составляет 1 слот. После этого, первый конечный автомат ГАЗП НКАГ ожидает получения сигнала F5_DONE из секции 335 функции состояний. Секция 335 функции состояний выдает F5_DONE при завершении операции управления в пятом состоянии S5. На Фиг.12 F5_DONE выдается в момент времени t5. При выдаче F5_DONE первый конечный автомат ГАЗП НКАГ переходит в шестое состояние S6.
Первый конечный автомат ГАЗП НКАГ находится в шестом состоянии S6 и ожидает выдачи сигнала F6_DONE из секции 335 функции состояний. Как показано на Фиг.12, сигнал F6_DONE может быть выдан по истечении времени 1,25 мсек. Поскольку первый конечный автомат ГАЗП НКАГ может перейти в первое состояние S1, на его работу не оказывает влияние следующий слот. Т.е., поскольку первый конечный автомат ГАЗП НКАГ может получить сигнал F6_DONE в момент времени t6 и затем немедленно перейти в первое состояние S1 в момент времени t7, следующий слот не оказывает влияния на обработку данных.
Ниже описаны операции в моменты времени с t7 по t9. В момент времени t7 первый конечный автомат ГАЗП НКАГ находится в состоянии S1. Если в момент времени t8 принимается сигнал F1_DONE из секции 336 функции состояний, первый конечный автомат ГАЗП НКАГ переходит во второе состояние S2 и затем ожидает выдачи сигнала F2_DONE из секции 335 функции состояний. Секция 335 функции состояний выполняет операцию управления во втором состоянии S2 и выдает сигнал F2_DONE при завершении операции управления. Если сигнал F2_DONE представляет собой "101", как показано в Таблице 3, первый конечный автомат ГАЗП НКАГ переходит в первое состояние S1, поскольку F2_DONE=101 является сигналом запроса перехода в первое состояние S1. Если F2_DONE представляет собой "110" или "111", что запрашивает переход в шестое состояние S6, первый конечный автомат ГАЗП НКАГ переходит в шестое состояние S6.
Фиг.13 является временной диаграммой переходов состояний первого конечного автомата ГАЗП и второго конечного автомата ГАЗП для задержки ACK/NAK=2 слота согласно варианту осуществления настоящего изобретения. Ниже приводится подробное описание операций перехода состояний первого конечного автомата ГАЗП НКАГ и второго конечного автомата ГАЗП ЧКАГ для задержки ACK/NAK=2 слота со ссылкой на Фиг.13. На Фиг.13 состояние первого конечного автомата ГАЗП НКАГ представляется OSi. Т.е., OS1 обозначает первое состояние S1 первого конечного автомата ГАЗП, а OS2 обозначает второе состояние S2 первого конечного автомата ГАЗП. Для обозначения состояний первого конечного автомата ГАЗП НКАГ состояния на чертеже обозначены OS1, OS2,.... Состояние второго конечного автомата ГАЗП обозначается FSi. Т.е., ЕS1 обозначает первое состояние S1 второго конечного автомата ГАЗП, а OS2 обозначает второе состояние S2 второго конечного автомата ГАЗП. Для обозначения состояний второго конечного автомата ГАЗП НКАГ состояния на чертеже обозначены ЕS1, ЕS2,.... Дополнительно OFi_DONE и EFi_DONE обозначают выход первого конечного автомата ГАЗП НКАГ и выход второго конечного автомата ГАЗП ЧКАГ, соответственно.
В первом состоянии S1 первый конечный автомат ГАЗП НКАГ принимает сигнал канала управления пакетных данных и декодирует принятый сигнал канала управления пакетных данных. Следовательно, если секция 335 функции состояний выдает сигнал F1_DONE в конкретный момент времени t1, первый конечный автомат ГАЗП НКАГ принимает его в момент времени t2 и затем переходит во второе состояние S2. Если сигнал F2_DONE выдается из секции 335 функции состояний во втором состоянии S2, первый конечный автомат ГАЗП НКАГ продолжает находиться во втором состоянии S2, возвращается в первое состояние S1 или переходит в третье состояние S3 или шестое состояние S6 согласно виду выданного сигнала. Четыре типа перехода состояний выполняются, исходя из значений выходных сигналов секции 335 функции состояний, приведенных в Таблице 3. На Фиг.13 показан переход в третье состояние S3, являющийся наиболее частым случаем перехода, как описано ниже.
При переходе в третье состояние S3 первый конечный автомат ГАЗП НКАГ игнорирует другие сигналы, например F1_DONE или F2_DONE, получаемые от секции 335 функции состояний, если они есть, и определяет, выдается ли из секции 335 функции состояний сигнал F3_DONE. Если сигнал F3_DONE выдается из секции 335 функции состояний в момент времени t4, первый конечный автомат ГАЗП НКАГ переходит в четвертое состояние S4, т.к. задержка ACK/NAK составляет 2 слота. После этого, первый конечный автомат ГАЗП НКАГ переходит в пятое состояние S5, когда принимается сигнал F4_DONE из секции 335 функции состояний. Пятое состояние S5 по длительности пересекает границу слота 1,25 мсек. Т.е. первый конечный автомат ГАЗП НКАГ в пятом состоянии S5 по длительности пересекает границу слота 1,25 мсек, которая представляет собой момент времени t6. Находясь, таким образом, в пятом состоянии S5, первый конечный автомат ГАЗП НКАГ ожидает получения сигнала F5_DONE.
В этом случае при получении новых пакетных данных после момента времени t6, если сигнал F1_DONE завершения первого состояния выдается из секции 335 функции состояний в момент времени t7, второй конечный автомат ГАЗП ЧКАГ переходит во второе состояние S2. Если второе состояние S2 завершено, т.е. если в момент времени t8 из секции 335 функции состояний выдается сигнал F2_DONE, второй конечный автомат ГАЗП ЧКАГ переходит в третье состояние S3. Существует 4 возможных перехода из второго состояния S2. На Фиг.13 показан переход в третье состояние S3.
Секция 335 функции состояний выполняет операцию управления для третьего состояния S3, и второй конечный автомат ГАЗП ЧКАГ находится в третьем состоянии S3. При завершении операции управления для третьего состояния S3 секция 335 функции состояний выдает сигнал F3_DONE в момент времени t9. Второй конечный автомат ГАЗП ЧКАГ затем переходит в четвертое состояние S4. Второй конечный автомат ГАЗП ЧКАГ находится в четвертом состоянии S4 до момента завершения первым конечным автоматом ГАЗП НКАГ пятого состояния S5. Т.е. секция 335 функции состояний выдает сигнал F4_DONE во второй конечный автомат ГАЗП ЧКАГ на следующий такт после момента времени t10, в который завершается пятое состояние S5 первого конечного автомата ГАЗП НКАГ. Соответственно, второй конечный автомат ГАЗП ЧКАГ может перейти в пятое состояние S5 в момент времени t11.
Согласно фиг.13, поскольку задержка ACK/NAK составляет 2 слота, сигнал F6_DONE завершения шестого состояния выдается в момент времени t13, который является последним моментом второго слота 1,25 мсек. Соответственно, первый конечный автомат ГАЗП НКАГ может перейти в первое состояние S1.
Согласно временной диаграмме по Фиг.13 секция 335 функции состояний должна быть сформирована следующим образом.
Во-первых, должны быть предусмотрены два процессора первого состояния, управляющих первым состоянием S1, для первого конечного автомата ГАЗП НКАГ и второго конечного автомата ГАЗП ЧКАГ, поскольку первый конечный автомат ГАЗП НКАГ и второй конечный автомат ГАЗП ЧКАГ могут одновременно находиться в первом состоянии S1.
Во-вторых, поскольку процессоры состояний со второго по пятое, управляющие состояниями со второго состояния S2 по пятое состояние S5, при любых условиях не действуют одновременно, они формируются раздельно и могут быть выполнены таким образом, что выходные сигналы обрабатываются в первом конечном автомате ГАЗП НКАГ и втором конечном автомате ГАЗП ЧКАГ.
В-третьих, шестое состояние S6, как указывалось выше, представляет собой состояние, в котором одновременно может находиться первый конечный автомат ГАЗП НКАГ и второй конечный автомат ГАЗП ЧКАГ. Следовательно, должны быть предусмотрены два процессора шестого состояния, обрабатывающих шестое состояние S6 таким образом, чтобы работать совместно с первым конечным автоматом ГАЗП НКАГ и вторым конечным автоматом ГАЗП ЧКАГ.
Таким образом, секция 335 функции состояний содержит процессоры состояний для соответствующих состояний для обработки внутренних функций, и указанные процессоры состояний выполняют операции, которые должны выполняться в соответствующих состояниях. Что касается количества процессоров состояний, предусмотрены два процессора состояний для первого и шестого процессоров, обрабатывающих первое и шестое состояния, и предусмотрен один процессор состояния для каждого процессора состояний со второго по пятое. Следовательно, секция 335 функции состояний может содержать всего 8 внутренних блоков.
Из Фиг.12 и 13 можно понять, что пятое состояние S5 не может выполняться одновременно. Следовательно, как для задержки ACK/NAK=1 слот, так и для задержки ACK/NAK=2 слота достаточно только одного турбо декодера 430 канала данных.
Со ссылкой на Фиг.5 ниже описан контроллер 340 выходного буфера. В общем случае в высокоскоростном модеме передачи данных, например EV-DV модеме, временные параметры и структура аппаратных средств для обмена данными с выходным буфером турбо декодера, контроллер ГАЗП и процессор (ЦПУ или хост) для эффективной передачи данных должны обладать характеристиками, перечисленными ниже. Т.е. в отличие от структуры выходного буфера сигналов, используемой в существующем прямом дополнительном канале (F-SCH) CDMA2000 1х, структура выходного буфера турбо декодера имеет следующие структурные характеристики для улучшения времени турбо декодирования и скорости передачи данных.
(1) Прежде всего используется структура двойного выходного буфера.
(2) Для уменьшения загрузки процессора (ЦПУ или хоста) обработкой прерываний максимум 4 выходных кадра (блоков декодированной информации или кодированных пакетов) последовательно сохраняется в выходном буфере. После этого, все данные в выходном буфере передаются в процессор одновременно по истечении определенного времени (5 мсек, по меньшей мере).
(3) Предусмотрены различные способы управления, в которых система выбирает один из двух способов работы выходного буфера согласно изменению ACK_DELAY (1 слот или 2 слота) конкретного обратного канала во время установки сотовой ячейки.
(4) Поскольку прямой канал пакетных данных (F-PDCH) представляет собой пакетные данные, он может передавать данные не в реальном масштабе времени, в отличие от существующего прямого дополнительного канала (F-SCH). Однако поскольку должна поддерживаться услуга практически в реальном масштабе времени, желательно, чтобы F-PDCH мог поддерживать быстродействующую передачу данных, если это возможно.
С этой целью, в отличие от существующего выходного буфера F-SCH требуется контроллер чтения/записи изменяемого выходного буфера. Контроллер, выполняющий указанную операцию управления, представляет собой контроллер выходного буфера (КВБ). В настоящем изобретении котроллер 340 выходного буфера, удовлетворяющий таким требованиям, входит в состав контроллера 300 ГАЗП. Т.е., в варианте осуществления настоящего изобретения, как указано выше, предусмотрен контроллер 340 выходного буфера, имеющий различные схемы передачи в соответствии с ACK_DELAY, работающий совместно с конечным автоматом ГАЗП контроллера 300 ГАЗП.
На фиг.14 представлена блок-схема, иллюстрирующая управляющие потоки между контроллером ГАЗП и его периферийными устройствами согласно настоящему варианту осуществления настоящего изобретения. Ниже подробно описаны управляющие потоки между контроллером ГАЗП и его периферийными устройствами согласно варианту осуществления настоящего изобретения со ссылкой на Фиг.5 и 14. Описание Фиг.14 дано в порядке ссылочных позиций 1, 2, ..., 14, которые представляют этапы.
Этап 1: Если мобильная станция находится в режиме установки физического канала EV-DV конфигурации радиоканала 10 (RC-10), который является одним из нескольких режимов установки физического канала CDMA2000 1х верхним уровнем сигнализации, то верхний уровень передает сигнал HARQ_ACTIVE активизации ГАЗП, указывающий на начало работы контроллера 300 ГАЗП.
Этап 2: Контроллер 300 ГАЗП разблокирует декодер 410 канала управления, выдавая сигнал PDCCH_DEC_EN разблокирования декодера канала управления в декодер 410 канала управления.
Этап 3: декодер 410 канала управления, если он разблокирован, принимает декодируемый сигнал из прямого канала управления пакетных данных (F-PDCCH) и выполняет операцию декодирования, соответствующую декодируемому сигналу. При завершении декодирования декодер 410 канала управления передает сигнал PDCCH_DEC_DONE и относящуюся к декодированию информацию в контроллер 300 ГАЗП.
Этап 4: Контроллер 300 ГАЗП определяет следующую операцию, используя информацию, полученную на этапе 3 от декодера 410 канала управления. Если MAC_ID в сигнале, принятом от декодера 410 канала управления, указывает на контроллер 300 ГАЗП, т.е. если принят сигнал MAK_ID_OK, генерируется соответствующая информация для выполнения операции приема прямых пакетных данных, принятых по прямому каналу пакетных данных (F-PDCH). Однако, если MAC ID не указывает на контроллер 300 ГАЗП, контроллер 300 ГАЗП повторно выполняет этап 3 и ожидает до того момента, когда будет принят MAC ID, указывающий на контроллер 300 ГАЗП.
Этап 5: Если существует прямой канал пакетных данных (F-PDCH), назначенный для мобильной станции, контроллер 300 ГАЗП выдает сигнал PDCH_DEMOD_EN разрешения демодуляции канала данных в демодулятор 420 канала данных для разблокирования демодулятора 420 канала данных.
Этап 6: После получения сигнала разрешения демодуляции данных демодулятор 420 канала данных выполняет операцию демодуляции, операцию обратного отображения и операцию очистки/комбинирования ККТК.
Этап 7: При завершении операции по этапу 6 демодулятор 420 канала данных выдает сигнал завершения демодуляции канала данных в контроллер 300 ГАЗП.
Этап 8: При завершении операции демодуляции канала данных контроллер 300 ГАЗП выдает сигнал PDCH_TURBO_EN разблокирования турбо декодера канала данных в турбо декодер 430 канала данных для считывания кодовых символов, сохраненных в буфере ККТС. После этого турбо декодер 430 канала данных выполняет турбо декодирование считанных кодовых символов.
Этап 9: При завершении операции декодирования турбо декодер 430 канала данных выдает сигнал PDCH_TURBO_DAN завершения турбо декодирования в контроллер 300 ГАЗП.
Этап 10: Контроллер 300 ГАЗП выполняет проверку ЦИК, используя данные, декодированные турбо декодером 430 канала данных. Если результат ЦИК декодированных данных является "плохим", контроллер 300 ГАЗП запускает операцию повышения эффективности декодирования турбо декодера 430 канала данных и управляет внешним буфером.
Этап 11: Контроллер 300 ГАЗП управляет передатчиком 440 ответного сигнала в соответствии с результатом декодирования или своим собственным решением для передачи ACK или NAK по обратному каналу ответа (R-ACKCH).
Этап 12: Контроллер 300 ГАЗП генерирует прерывание для передачи на верхний уровень данных, сохраненных в выходном буфере после их приема по прямому каналу пакетных данных и окончательно декодированных турбо декодером 430 канала данных.
Этап 13: Верхний уровень передает на свой верхний уровень прямые пакетные данные, сохраненные в выходном буфере турбо декодера 430 канала данных, в ответ на сигнал прерывания, полученный от контроллера 300 ГАЗП.
Этап 14: При завершении передачи данных, принятых по прямому каналу пакетных данных, сохраненных в выходном буфере турбо декодера канала данных, верхний уровень информирует контроллер 300 ГАЗП о завершении приема прямого канала пакетных данных.
Ниже описаны операции с этапа 1 по этап 14 отдельно для задержки ACK/NAK=1 слот и задержки ACK/NAK=2 слота. Сначала описаны операции с этапа 1 по этап 14 для задержки ACK/NAK=1 слот.
Для задержки ACK/NAK=1 слот операция турбо декодера 430 канала данных завершается перед каждым слотом. Следовательно, турбо декодер 430 канала данных генерирует сигнал PDCH_TURBO_EN разблокирования турбо декодера 430 канала данных немедленно после сигнала PDCH_DEMOD_DONE завершения демодуляции демодулятора 420 канала данных. Операция декодирования турбо декодера 430 канала данных завершается в пределах 1 слота. Таким образом, предел максимального времени ограничен 1 слотом, если результат проверки ЦИК декодированных данных из турбо декодера 430 канала данных является "неудовлетворительно" или "удовлетворительно", или если выполняется преждевременная остановка до достижения максимального количества повторов декодирования. Следовательно, если определено, что операция декодирования турбо декодера 430 канала данных продолжается в течение 1 слота или более, контроллер 300 ГАЗП принудительно останавливает операцию декодирования перед границей единичного слота. Таким образом, операция турбо декодирования завершается в пределах одного слота. Поскольку вся операция ГАЗП выполняется таким образом в пределах 1 слота, операции ГАЗП, в которых канал АЗП принимается в последовательных слотах, выполняются независимо друг от друга.
Ниже описаны операции с этапа 1 по этап 14 для задержки ACK/NAK=2 слота.
Для задержки ACK/NAK=2 слота турбо декодер 430 канала данных может выполнять операцию декодирования, по длительности, простирающуюся за границы первого слота вплоть до границы второго слота после получения подпакета. Здесь канал АЗП может приниматься в последующих слотах. В этом случае, существует период времени, в котором операции ГАЗП пересекаются. Такой период времени пересечения относится только к работе турбо декодера 430 канала данных и не относится к работе демодулятора 420 канала данных, поскольку демодулятор 420 канала данных не работает в следующем слоте, поскольку операция демодуляции выполняется в пределах слота 1,25 мсек, в котором принимаются пакетные данные. Однако турбо декодер 430 канала данных начинает свою операцию декодирования в слоте, в котором принимаются пакетные данные, и завершает операцию декодирования в следующем слоте 1,25 мсек. Следовательно, когда над данными, принятыми в первом слоте, непрерывно выполняется операция турбо декодирования во втором слоте, данные, принятые во втором слоте, ожидают завершения декодирования данных, принятых в первом слоте. При завершении турбо декодирования данных, принятых в первом слоте, выполняется турбо декодирование данных, принятых во втором слоте. Над пакетными данными, принятыми во втором слоте, также может непрерывно выполняться операция турбо декодирования вплоть до третьего слота подобно пакетным данным, принятым в первом слоте.
На фиг.15 представлена блок-схема, иллюстрирующая процедуру управления соответствующих состояний контроллером ГАЗП во время приема данных согласно варианту осуществления настоящего изобретения. Ниже подробно описана процедура управления соответствующих состояний контроллером ГАЗП во время приема данных согласно варианту осуществления настоящего изобретения со ссылкой на Фиг.15.
На этапе 600 контроллер 300 ГАЗП находится в начальном состоянии, представляющем собой первое состояние S1. В начале первого состояния S1 контроллер 300 ГАЗП выполняет инициализацию параметров и ожидает результата декодирования канала управления пакетных данных (PDCCH), управляя декодером 410 канала управления. Ожидая результата декодирования канала управления пакетных данных, контроллер 300 ГАЗП определяет на этапе 602, получен ли сигнал завершения декодирования канала управления пакетных данных от декодера 410 канала управления. Если на этапе 602 определяется, что получен сигнал завершения декодирования канала управления пакетных данных, контроллер 300 ГАЗП переходит к этапу 604, а если декодирование канала управления пакетных данных не завершено, контроллер 300 ГАЗП непрерывно выполняет этап 600. На этапе 604 контроллер 300 ГАЗП находится в состоянии управления для второго состояния S2. Во втором состоянии S2 контроллер 300 вычисляет параметр демодуляции прямого канала пакетных данных и выполняет протокол быстродействующего ГАЗП.
После этого, контроллер 300 ГАЗП на этапе 606 определяет, является ли управляющее сообщение, полученное по каналу управления пакетных данных (PDCCH), управляющим сообщением для канала пакетных данных (PDCH). Если на этапе 606 выясняется, что получено управляющее сообщение для канала пакетных данных, контроллер 300 ГАЗП переходит к этапу 612. В противном случае контроллер 300 ГАЗП переходит к этапу 608, на котором он определяет, является ли полученное сообщение сообщением управления режимом удержания/переключения сотовой ячейки. Контроллер 300 ГАЗП выполняет такую операцию по следующим причинам. В общем случае на верхнем уровне команда для операции управления режимом удержания (УРУ) или переключения сотовой ячейки (ПС), управляемая при помощи обмена сообщениями между базовой станцией и мобильной станцией, передается по отдельному каналу управления. Однако в случае, если операция должна быть выполнена быстро, такая команда может быть передана из базовой станции в мобильную станцию по каналу PDCCH, а не по существующему каналу управления. Следовательно, не зная, когда базовая станция посылает такое сообщение в мобильную станцию, мобильная станция определяет, получено ли такое управляющее сообщение верхнего уровня при каждом декодировании канала PDCCH, и, если обнаруживается такое сообщение, оно должно быть быстро передано на верхний уровень. Если на этапе 608 определено, что получено сообщение управления режимом удержания/переключения сотовой ячейки, контроллер 300 ГАЗП переходит к этапу 610, на котором он передает полученное сообщение на уровень МАС, который представляет собой его верхний уровень.
На этапе 612 контроллер 300 ГАЗП определяет, является ли параметр, вычисленный на этапе 604, запрещенным параметром. Если обнаружен запрещенный параметр, контроллер 300 ГАЗП возвращается на этап 600, на котором он переходит в первое состояние S1. В противном случае, контроллер 300 ГАЗП переходит к этапу 614, на котором он переходит в третье состояние S3. На этапе 614 контроллер 300 ГАЗП выполняет демодуляцию, управляя демодулятором 420 канала данных. После этого, если демодуляция завершена, контроллер 300 ГАЗП на этапе 616 определяет, занят ли турбо декодер 430 канала данных. Если на этапе 616 устанавливается, что турбо декодер 430 канала данных занят, контроллер 300 ГАЗП переходит к этапу 618, на котором он находится в состоянии ожидания четвертого состояния S4. Однако, если на этапе 616 устанавливается, что турбо декодер 430 канала данных не занят, контроллер 300 ГАЗП переходит к этапу 620, в котором он находится в состоянии декодирования пятого состояния S5. Контроллер 300 ГАЗП переходит от этапа 616 к этапу 618, если задержка ACK/NAK составляет 2 слота, и турбо декодирование пакетных данных, полученных в предыдущем слоте, не завершено.
На этапе 620 турбо декодер 430 канала данных выполняет турбо декодирование, управляя турбо декодером 430 канала данных. При завершении операции декодирования турбо декодером 430 канала данных контроллер 300 ГАЗП переходит к этапу 622, на котором он выполняет шестое состояние S6. Шестое состояние S6 представляет этап передачи ACK/NAK, и в шестом состоянии S6 контроллер 300 ГАЗП управляет передачей ACK/NAK по обратному каналу в соответствии с результатом турбо декодирования, выдаваемым турбо декодером 430 канала данных. После этого контроллер 300 ГАЗП переходит в первое состояние S1.
Как описано выше, мобильная система связи может уменьшить нагрузку на верхний уровень путем размещения физически структурированного контроллера ГАЗП между уровнем МАС и физическим уровнем, уменьшая нагрузку на ЦПУ вследствие максимальной тактовой частоты и уменьшая время обработки данных. Дополнительно, если поддерживается N-канальный ГАЗП, мобильная система связи может поддерживать как задержку ACK/NAK=1 слот, так и задержку ACK/NAK=2 слота вне зависимости от количества каналов, предотвращая увеличение сложности мобильной станции. Более того, таким способом возможна быстрая передача управляющей информации по каналу управления трафиком на верхний уровень.
Хотя настоящее изобретение показано и описано со ссылкой на определенный вариант его осуществления, специалистам в данной области техники должно быть понятно, что могут быть сделаны различные изменения в формах и деталях настоящего изобретения без отступления от сущности и объема настоящего изобретения, определенных прилагаемой формулой изобретения.

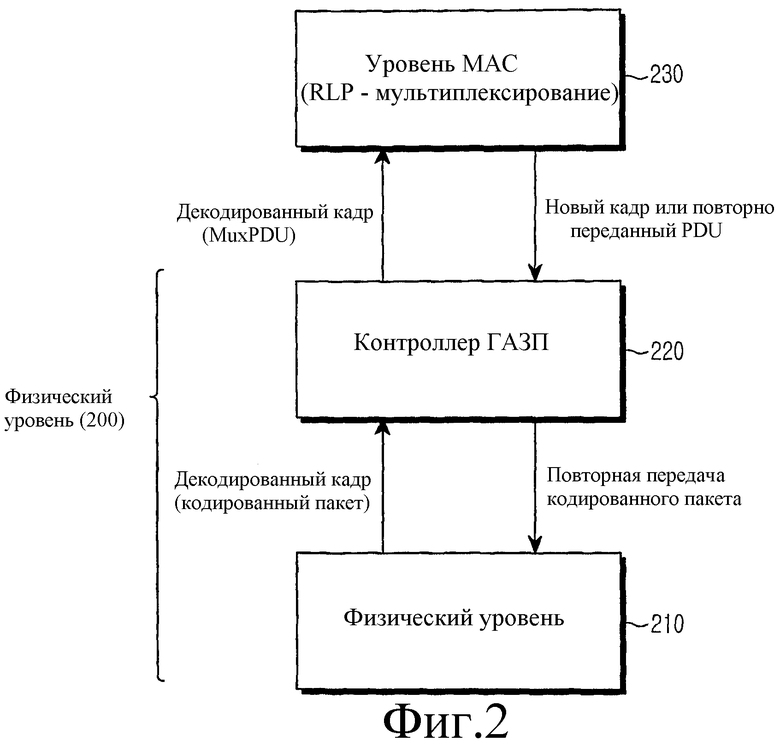










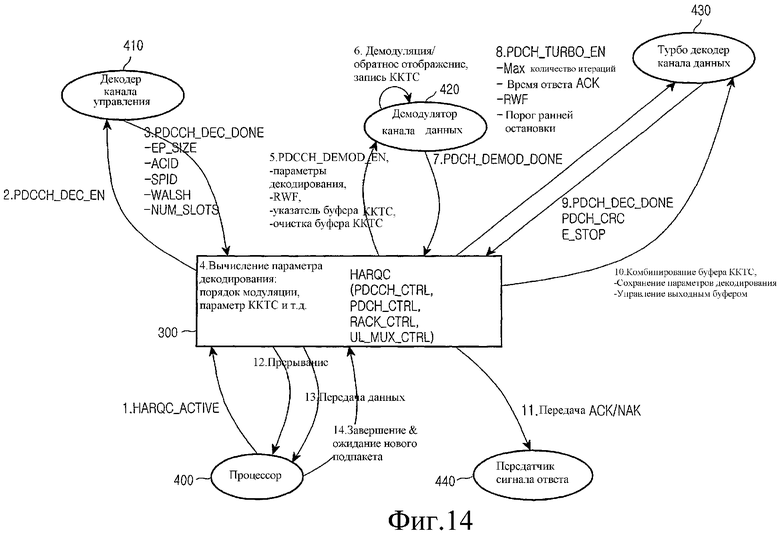

Изобретение относится к устройству и способу управления автоматическим запросом повторной передачи (АЗП) в системе высокоскоростной передачи данных. Технический результат заключается в уменьшении загрузки на верхний уровень, в возможности быстрой передачи управляющей информации по каналу управления трафика в соответствии с результатом турбо кодирования на верхний уровень вне зависимости от количества каналов. Технический результат достигается тем, что устройство управления работой канала данных в мобильной системе связи содержит физический уровень (ФУ) для раздельного приема пакетных данных (ПД) и управляющего сообщения по каналу ПД и каналу данных и декодирования принятых ПД и управляющего сообщения, контроллер ГАЗП ФУ для вычисления результатов декодирования, принятых с ФУ, и управления ФУ согласно результату вычисления; а также тем, что устройство, представляющее собой контроллер ГАЗП для повторной передачи данных в мобильной станции системы мобильной связи, содержит конечный автомат ГАЗП для получения информации состояния от ФУ и определения результата перехода в следующее состояние для секции функции состояний и секцию функции состояний для указания операции ФУ согласно определенному результату из конечного автомата ГАЗП. 2 н. и 19 з.п. ф-лы, 15 ил., 3 табл.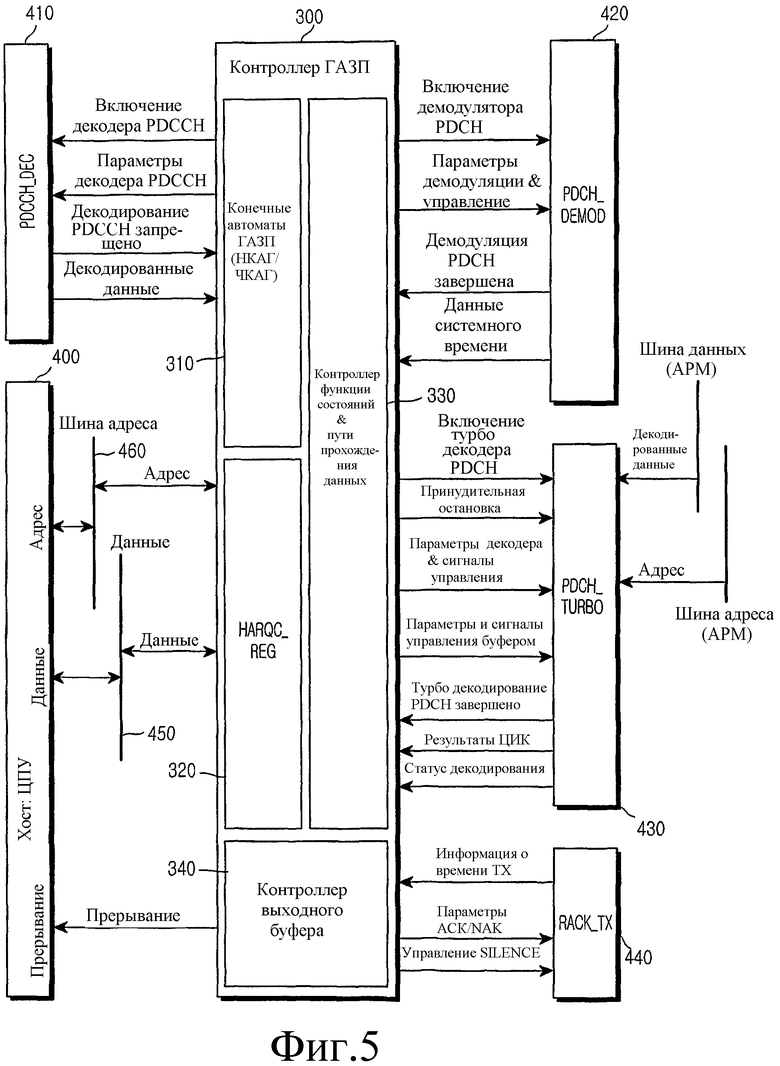
| Способ производства красного чая | 1982 |
|
SU1156617A1 |
| Устройство для отделения костры от отходов трепания лубяных волокон | 1983 |
|
SU1199833A1 |
| Способ выделения пиридилэтанолов | 1978 |
|
SU771092A1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ В ПОЛУДУПЛЕКСНОМ КАНАЛЕ СВЯЗИ | 1996 |
|
RU2127953C1 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ И СКОРОСТИ ПЕРЕДАЧИ В БЕСПРОВОДНЫХ СИСТЕМАХ СВЯЗИ | 1996 |
|
RU2142672C1 |

