Изобретение относится к управлению двигателями внутреннего сгорания.
Цель изобретения - повышение точности управления распределения нагрузки по цилиндрам двигателя.
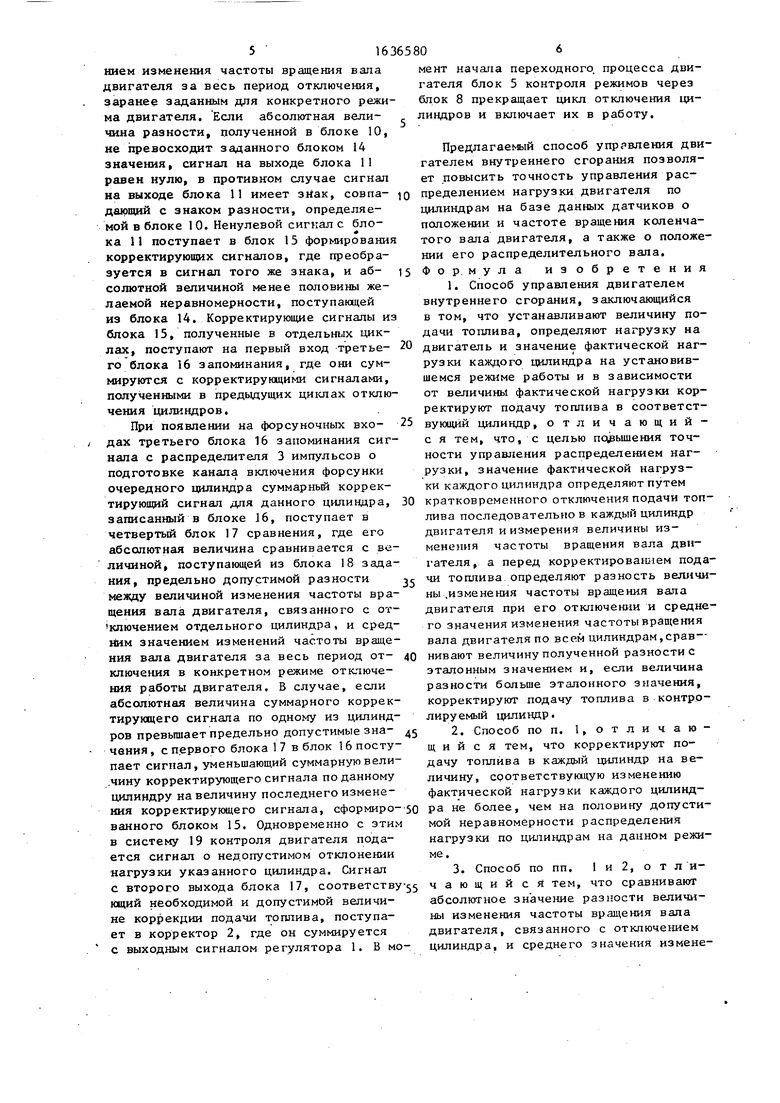
На чертеже представлена функциональная схема системы управления, реализующей предлагаемый способ.
Система содержит электронный регулятор частоты вращения вала двигателя 1, выход которого соединен с первым входом корректора 2, распределитель-Формирователь 3 импульсов, с первым входом которого соединены выход корректора 2 и электроуправля- емые форсунки 4, входы которых соединены с соответствующими выходами распределителя-формирователя 3. Выход электронного регулятора 1 параллельно соединен с блоком 5 контроля режимов,
первым входом первого блока 6 сравнения и первым входом первого блока 7 запоминания. Выход блока 5 контроля режимов соединен с входом блока 8 отключения цилиндров и вторым входом первого блока 7 запоминания. Выход первого блока 7 запоминания соединен с вторым входом первого блока 6 сравнения. Первый выход блока 8 отключения цилиндров соединен с вторым входом распределителя-формирователя 3 импульсов, третьим входом первого блока 6 сравнения и первым входом второго блока 9 запоминания, второй выход блока 8 отключения цилиндров соединен с первым входом блока 10 сравнения, выход которого соединен с первым входом третьего блока 11 сравнения. Первый выход блока 8 отключения цилиндров соединен также с первым
оъ оо
О5
ел
00
входом блока 12 суммирования, выход которого соединен с блоком 13 деления. Выход блока 13 деления соединен с третьим входом блока 10 сравнения, второй вход которого соединен с выходом второго блока 9 запоминания. Второй вход третьего блока 11 сравнения соединен с выходом блока задания оптимальной разности между величиной изменения частоты вращения вала двигателя, связанного с отключением цилиндра, и средним значением изменения частоты вращения вала двигателя за весь период отключения блока 14, первый вход которого связан с выходом электронного регулятора 1. Выход третьего блока 11 сравнения соединен с первым входом блока 15 формирования изменений корректирующих сигналов. Второй вход блока 15 соединен с выходом блока 14, Выход блока 15 соединен с первым входом третьего блока 16 запоминания, выход которого соединен с первым входом четвертого блока 17 сравнения, второй вход которого соединен с блоком задания предельно допустимой разности между величиной изменения частоты вращения вала двигателя, связанного с отключением цилинд- ра, и средним значением изменения частоты вращения вала двигателя за весь период отключения блока 18. Первый выход четвертого блока 17 сравнения соединен с вторым входом третьего блока 16 запоминания, второй выход блока 17 соединен с вторым входом корректора 2, а третий выход блока 17 соединен с входом системы 19 контроля двигателя. Остальные входы блока 16 соединены с соответствующими входами блока 3 параллельно входам электро управляемых форсунок 4. Система управления связана с двигателем 20 посредством датчиков частоты вращения ко ленчатого вала двигателя 21 и его положения 22, датчика положения распределительного вала 23. При этом выход датчика 21 связан с входом электронного регулятора 1 и вторым входом блока 14 задания. Выход датчика 22 связан с третьим входом блока 3, а выход датчика 23 - с четвертым входом последнего.
Система работает следующим образом При установившемся режиме работы двигателя блок 5 контроля режимов, проанализировав выходной сигнал регулятора 1, подает сигнал на второй
вход первого блока 7 запоминания, который при этом запоминает текущее значение сигнала регулятора 1, и на вход блока 8 отключения цилиндров, который подает на второй вход распределителя- формирователя 3 управляющие сигналы. При этом последний начинает поочередно прекращать подачу управляющих импульсов электроуправляемых форсунок 4 отдельных цилиндров, в результате чего происходит снижение частоты вращения вала двигателя. Электронный регулятор 1 восстанавливает исходное значение частоты вращения, увеличивая свой выходной сигнал, что приводит к увеличению подачи топлива в неотключенные цилиндры. При этом по сигналам с блока 8 отключения цилиндров первый блок 6 сравнения, сопоставив текущие значения выходного сигнала регулятора частоты с исходным, записанным в первом блоке 7 запоминания, определяет изменение этого сигнала при отключении каждого цилиндра, которое соответствует доле нагрузки двигателя, приходящейся на каждый отключаемый цилиндр в отдельности. Эти изменения записываются вторым блоком 9 запоминания по сигналам с блока 8 отключения цилиндров. Одновременно по этим же сигналам блок 12 суммирования суммирует изменения выходного сигнала регулятора 1, поступающие на второй вход блока 12 с выхода первого блока 6 сравнения. Значение полученной суммы делится на число отключаемых цилиндров в блоке 13 деления, что определяет среднее значение изменений выходного сигнала регулятора, за цикл отключения. Во втором блоке 10 сравнения при поступлении с блока 8 сигнала о завершении цикла отключения цилиндров определяются разности между средним значением изменений выходного сигнала регулятора, полученном в блоке 13, и изменениями выходного сигнала регулятора при отключении отдельных цилиндров, записанными в блоке 9. Эти разности характеризуют неравномерность распределения нагрузки по цилиндрам двигателя. В третьем блоке 11 сравнения определенные в блоке 10 значения разности сравниваются с поступающим из блока 14 заданием оптимальной разности между величиной изменения частоты вращения вала двигателя, связанного с отключением отдельного цилиндра, и средним значе51636580
нием изменения частоты вращения вала двигателя за весь период отключения, заранее заданным для конкретного режима двигателя. Если абсолютная величина разности, полученной в блоке 10, не превосходит заданного блоком 14 значения, сигнал на выходе блока 11 равен нулю, в противном случае сигнал на выходе блока 11 имеет знак, совпадающий с знаком разности, определяемой в блоке 10. Ненулевой сигнале блока 11 поступает в блок 15 формирования корректирующих сигналов, где преобразуется в сигнал того же знака, и аб- 15 солютной величиной менее половины желаемой неравномерности, поступающей из блока 14. Корректирующие сигналы из блока 15, полученные в отдельных цик10
мент начала переходного, процесса двигателя блок 5 контроля режимов через блок 8 прекращает цикл отключения цилиндров и включает их в работу.
Предлагаемый способ управления двигателем внутреннего сгорания позволяет повысить точность управления распределением нагрузки двигателя по цилиндрам на базе данных датчиков о положении и частоте вращения коленчатого вала двигателя, а также о положении его распределительного вала. Формула изобретения
1. Способ управления двигателем внутреннего сгорания, заключающийся в том, что устанавливают величину подачи топлива, определяют нагрузку на
лах, поступают на первый вход третье- 20 двигатель и значение фактической наг5
0
мент начала переходного, процесса двигателя блок 5 контроля режимов через блок 8 прекращает цикл отключения цилиндров и включает их в работу.
Предлагаемый способ управления двигателем внутреннего сгорания позволяет повысить точность управления распределением нагрузки двигателя по цилиндрам на базе данных датчиков о положении и частоте вращения коленчатого вала двигателя, а также о положении его распределительного вала. Формула изобретения
1. Способ управления двигателем внутреннего сгорания, заключающийся в том, что устанавливают величину подачи топлива, определяют нагрузку на

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления подачей топлива в двигатель внутреннего сгорания с индивидуальной для каждого цилиндра регулировкой подачи топлива | 1989 |
|
SU1778341A1 |
| СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЛИНЕЙНЫМ ЭЛЕКТРИЧЕСКИМ ГЕНЕРАТОРОМ ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2150014C1 |
| Система управления двигателем внутреннего сгорания | 1987 |
|
SU1537862A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ФОРСУНКА | 1999 |
|
RU2150019C1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Способ управления подачей топлива в двигатель внутреннего сгорания | 1986 |
|
SU1344929A1 |
| Способ управления двигателем внутреннего сгорания | 1987 |
|
SU1455020A1 |
| Система управления двигателем внутреннего сгорания с автоматическим отключением подачи топлива в цилиндры | 1985 |
|
SU1268773A1 |
| Система управления двигателя внутреннего сгорания | 1984 |
|
SU1239691A1 |
| Система управления двигателем внутреннего сгорания | 1985 |
|
SU1305421A1 |

Изобретение позволяет повысить точность управления распределением нагрузки двигателя по цилиндрам Ј учетом информации от датчиков о положении и частоте вращения коленчатого вала двигателя, а также о положении его распределительного вала и за счет того, что, используя электронный регулятор частоты вращения вала двигателя, значение фактической нагрузки каждого цилиндра определяют путем кратковременного отключения подачи топлива последовательно в каждый цилиндр двигателя и изменения величины измерения частоты вращения вала двигателя при дальнейшем накоплении и обработке информации о величинах этих изменений. На базе этой информации осуществляется корректировка подачи топлива в каждый цилиндр на величину, соответствующую изменению фактической нагрузки каждого цидиндра. 3 з.п.ф-лы, 1 ил. (Л
го блока 16 запоминания, где они суммируются с корректирующими сигналами, полученными в предыдущих циклах отключения цилиндров.
При появлении на форсуночных вхо- 25 дах третьего блока 16 запоминания сигнала с распределителя 3 импульсов о подготовке канала включения форсунки очередного цилиндра суммарный корректирующий сигнал для данного цилиндра, 30 записанный в блоке 16, поступает в четвертый блок 17 сравнения, где его абсолютная величина сравнивается с величиной, поступающей из блока 18 задания, предельно допустимой разности-js между величиной изменения частоты вращения вала двигателя, связанного с от- кпючением отдельного цилиндра, и средним значением изменений частоты вращения вала двигателя за весь период от- 40 ключения в конкретном режиме отключения работы двигателя. В случае, если абсолютная величина суммарного корректирующего сигнала по одному из цилиндров превышает предельно допустимые зна- 4$ чения, с первого блока 1 7 в блок 16 поступает сигнал, уменьшающий суммарную в ели- чину корректирующего сигнала по данному цилиндру на величину последнего изменения корректирующего сигнала, сформиро-50 ра не более, чем на половину допустимой неравномерности распределения нагрузки по цилиндрам на данном режиме .
с второго выхода блока 17, соответствую чающийся тем, что сравнивают
ющий необходимой и допустимой величине коррекции подачи топлива, поступает в корректор 2, где он суммируется с выходным сигналом регулятора 1. В моруэки каждого цилиндра на установившемся режиме работы и в зависимости от величины фактической нагрузки корректируют подачу топлива в соответствующий цилиндр, отличающий- с я тем, что, с целью повышения точности управления распределением нагрузки, значение фактической нагрузки каждого цилиндра определяют путем кратковременного отключения подачи топлива последовательно в каждый цилиндр двигателя и измерения величины изменения частоты вращения вала двигателя, а перед корректированием подачи топлива определяют разность величины .изменения частоты вращения вала двигателя при его отключении и среднего значения изменения частоты вращения вала двигателя по всем цилиндрам,сравнивают величину полученной разности с эталонным значением и, если величина разности больше эталонного значения, корректируют подачу топлива в контролируемый цилиндр.
мого значения разности прекращают кор- рения значения выходного сигнала регуреКЦИЮ ПОдаЧИ ТОППИна.патпг.- Liax., „.,
рекцию подачи топлива
лятора частоты вращения.
рения значения выходного сигнала регу рения значения выходного
патпг.- Liax., „.,
лятора частоты вращения.
| СПОСОБ ПОЛУЧЕНИЯ ВИНИЛОВБ1Х ЭФИРОВ 2-ВИНИЛ-Ы- ОКСИАЛКИЛ-1,3-ОКСАЗОЛИДИНА | 0 |
|
SU241443A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
