Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей.
Известен навигационный комплекс летательного аппарата [1], содержащий спутниковую навигационную систему (приемник СРНС), инерциальную навигационную систему (ИНС), навигационный вычислитель (вычислитель).
Недостатком известного навигационного комплекса является недостаточная точность выдаваемых навигационных данных.
Сущность изобретения заключается в том, что навигационный комплекс летательного аппарата, содержащий инерциальную навигационную систему, спутниковую навигационную систему, навигационный вычислитель, дополнительно содержит регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
При этом выход инерциальной навигационной системы соединен с первым входом навигационного вычислителя и первым входом регистратора навигационной информации, выход спутниковой навигационной системы соединен со вторым входом навигационного вычислителя и вторым входом регистратора навигационной информации, выход регистратора навигационной информации соединен с входом вычислителя погрешностей инерциальной навигационной системы, выход которого соединен с входом энергонезависимого запоминающего устройства, выход которого соединен с третьим входом навигационного вычислителя и входом вычислителя поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы, выход которого соединен с четвертым входом вычислителя, выход которого является выходом 8 навигационной информации.
Сущность изобретения поясняется чертежом, на котором обозначены:
1 - инерциальная навигационная система;
2 - спутниковая навигационная система;
3 - навигационный вычислитель;
4 - регистратор навигационной информации;
5 - вычислитель погрешностей инерциальной навигационной системы;
6 - энергонезависимое запоминающее устройство;
7 - вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы;
8 - выход навигационной информации.
Сущность изобретения не зависит от типа применяемой инерциальной навигационной системы. Повышение точности определения навигационных параметров достигается и при использовании систем со встроенным вычислителем координат и курса, и при использовании инерциальных курсовертикалей со свободной или корректируемой (полусвободной) в азимуте гироплатформой, не имеющих вычислителя координат.
Ниже в качестве примера рассмотрим вариант использования в качестве инерциальной навигационной системы 1 инерциальной курсовертикали со свободной в азимуте гироплатформой.
Навигационный вычислитель 3, вычислитель 5 погрешностей инерциальной навигационной системы, вычислитель 7 поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы представляют собой бортовые электронно-вычислительные машины. Функции навигационного вычислителя 3, вычислителя 5 погрешностей инерциальной навигационной системы, вычислителя 7 поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы могут выполняться также одной бортовой электронно-вычислительной машиной.
Навигационный вычислитель 3 предназначен для осуществления во время полета летательного аппарата обработки навигационной информации, поступающей от инерциальной навигационной системы 1 и от спутниковой навигационной системы 2. При этом осуществляется коррекция данных, поступающих от инерциальной навигационной системы 1 по данным спутниковой навигационной системы 2.
Результатом обработки навигационной информации в навигационном вычислителе 3 являются данные о географических координатах (широте Φ и долготе λ ) летательного аппарата, высоте его полета (H), данные о составляющих скоростей летательного аппарата (северной VN, восточной VE, вертикальной VH), данные о курсе летательного аппарата (Φист).
Регистратор 4 навигационной информации представляет собой накопитель информации, в который на протяжении всего полета записываются данные, поступающие от инерциальной и спутниковой навигационных систем 1 и 2. По окончании полета эти данные используются вычислителем 5 погрешностей инерциальной навигационной системы.
Вычисленные вычислителем 5 погрешностей инерциальной навигационной системы погрешности заносятся в энергонезависимое запоминающее устройство 6, в котором эти данные хранятся до следующего полета.
Вычислитель 7 поправок: к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы на основании информации о погрешностях инерциальной навигационной системы 1, хранящейся в энергонезависимом запоминающем устройстве 6, вычисляет поправки, которые поступают в навигационный вычислитель 3 и используются им для корректировки данных, поступающих от инерциальной навигационной системы 1.
Навигационный комплекс летательного аппарата работает следующим образом.
Данные о составляющих абсолютных скоростей летательного аппарата в осях гироплатформы Vξст, Vηст, Vξст, о гироскопическом курсе ψг, об угле крена γ, об угле тангажа υ с выхода инерциальной навигационной системы 1 поступают на первые входы навигационного вычислителя 3 и регистратора 4 навигационной информации. Данные о географической широте Φ, о географической долготе λ, о составляющих относительных скоростей летательного аппарата (скоростей летательного аппарата относительно Земли) VN (северная составляющая), VE (восточная составляющая), VH (вертикальная составляющая) и данные о текущем времени (с выхода спутниковой навигационной системы 2) поступают на вторые входы навигационного вычислителя 3 и регистратора 4 навигационной информации.
Навигационный вычислитель 3 на основании данных инерциальной навигационной системы 1 производит вычисление координат и высоты полета летательного аппарата (производит интегрирование составляющих скоростей). Затем производится комплексная обработка навигационных данных, полученных от инерциальной навигационной системы 1 и спутниковой навигационной системы 2. При этом учитывается, что данные спутниковой навигационной системы 2 являются более точными и их точность не зависит от продолжительности полета, но при этом в них присутствуют высокочастотные помехи и возможны ситуации неработоспособности спутниковой навигационной системы 2 из-за присутствия радиопомех, затенения антенны и других причин. При неработоспособности спутниковой навигационной системы 2 работа навигационного комплекса осуществляется только на основании данных от инерциальной навигационной системы 1.
На протяжении всего полета регистратор 4 навигационной информации осуществляет запись данных, полученных от инерциальной навигационной системы 1 и от спутниковой навигационной системы 2.
Вычисление координат и высоты полета летательного аппарата (интегрирование составляющих скоростей) по данным инерциальной навигационной системы 1 осуществляется следующим образом.
Перед полетом летательного аппарата навигационным вычислителем 3 производится вычисление начального значения азимутального угла гироплатформы инерциальной навигационной системы (равного стояночному курсу летательного аппарата) χ0 :
где Vξст,Vηст - составляющие (по осям гироплатформы) абсолютной скорости, измеренные инерциальной навигационной системой 1.
Вычисляются составляющие (по осям гироплатформы) угловой скорости вращения Земли Uξ0,Uη0,Uξ0 :
Uξ0= UcosΦ0cosχ0; (2)
Uη0= UcosΦ0sinχ0; (3)
U0ζ= UsinΦ0, (4)
где U - угловая скорость вращения Земли, Φ0 - географическая широта точки стоянки летательного аппарата.
Вычисляются начальные значения отклонения горизонтальных осей гироплатформы θ
где e2 = 0,0066934216.
Вычисляются фактические значения скомпенсированных постоянных дрейфов гироскопов:
ωζф0= KVξст0-Uζ0, (9)
где K - масштабный коэффициент, R - радиус Земли, на который настроена инерциальная навигационная система.
Вычисляются добавочные дрейфы ωξдоб0,ωηдоб0,ωζдоб0, обусловленные методическими погрешностями начальной выставки:

ωζдоб0= -θη0Uξ0+θξ0Uη0, (12)
где Rξ,Rη - радиусы кривизны земного эллипсоида по сечениям, проходящим через оси гироплатформы, R0 - вспомогательный параметр.
Вычисляются поправки на постоянные дрейфы гироскопов к измеренным линейным скоростям ωξдр0,ωηдр0 :
ωξдр0= Rωηф0; (13)
ωηдр0= -Rωξф0. (14)
Решается система дифференциальных уравнений движения гироплатформы под воздействием методических погрешностей:
где ΔV
Вычисляется дрейф азимутального гироскопа ωζ0 :
ωζ0= ωζф0+ωζдоб0. (16)
При этом начальные значения θ
Вычисляются абсолютные скорости для счисления Vξ,Vη :
Vξ= Vξст-ωξдоб0-ΔV
Vη= Vηст-ωηдоб0-ΔV
Вычисляются абсолютные угловые скорости uξ,uη :
Вычисляются абсолютные ускорения aξ,aη,aζ :


где β = 0,05317,  = H - вертикальная скорость, a - большая полуось земного эллипсоида (a = 6378245 м).
= H - вертикальная скорость, a - большая полуось земного эллипсоида (a = 6378245 м).
Вычисляются радиусы кривизны меридиана M, первого вертикала N и параметр R0:
Вычисляются азимут гироплатформы χ и истинный курс φИКВ :
φИКВ= φг+χ. (28)
Вычисляются скорости в осях сопровождающего трехгранника VN, VE:
VN= Vξcosχ+Vηsinχ; (29)
VE= Vξsinχ-Vηcosχ-NUcosΦИКВ. (30)
Вычисляются географическая широта ΦИКВ и географическая долгота λИКВ :
После окончания полета вычислителем 5 погрешностей инерциальной навигационной системы производится комплексная обработка данных, собранных во время полета регистратором 4 навигационной информации. Комплексная обработка информации производится с использованием известных методов идентификации источников погрешностей инерциальных навигационных систем, например с использованием фильтра Калмана [2]. При этом расчеты производятся как в прямом, так и обратном времени. В процессе этой обработки производится расчет следующих погрешностей инерциальной навигационной системы 1:
ωξn, ωηn, ωζn - недокомпенсированные постоянные составляющие дрейфов гироскопов;
ωξξ, ωξη - дрейфы гироскопа с измерительной осью ξ , пропорциональные действующим ускорениям по осям ξ и η соответственно;
ωηξ, ωηη - дрейфы гироскопа с измерительной осью η , пропорциональные действующим ускорениям по осям ξ и η соответственно;
Δmξ, Δmη - погрешности масштабных коэффициентов акселерометров;
ΔVξb, ΔVηb - скомпенсированные перед полетом постоянные дрейфы гироскопов.
Дополнительно с помощью фильтра Калмана четвертого порядка, в качестве вектора измерений которого используется высота и вертикальная скорость, полученные с использованием информации инерциальной навигационной системы 1 и спутниковой навигационной системы 2, формируются оценки постоянной составляющей погрешности и погрешности масштабного коэффициента вертикального акселерометра ( Δaζn, Δmζ ).
Результаты расчета величин ωξn, ωηn, ωζn, ωξξ, ωξη, ωηξ, ωηη, Δmξ, Δmη, ΔVξb, ΔVηb, Δaζn, Δmζ из вычислителя 5 погрешностей инерциальной навигационной системы поступают в энергонезависимое запоминающее устройство 6.
Перед вторым и последующими полетами начальный угол χ0 ориентации гироплатформы инерциальной навигационной системы 1 в азимуте формируется в соответствии с соотношением:
Также на основании информации, записанной в энергонезависимом запоминающем устройстве 6, вычислитель 7 поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы производит вычисление поправок ΔVNb, ΔVEb и Δχb исходя из следующих соотношений: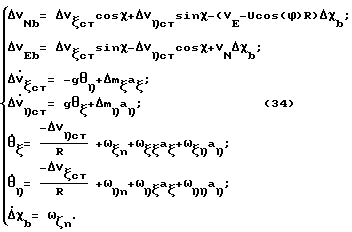
Результаты вычислений поправок ΔVNb, ΔVEb и Δχb из вычислителя 7 поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы поступают на четвертый вход навигационного вычислителя 3. При этом также параметры ΔVξb и ΔVηb из энергонезависимого запоминающего устройства 6 на третий вход навигационного вычислителя 3. Навигационный вычислитель формирует скорости в осях сопровождающего трехгранника в виде:
При этом истинный курс формируется в виде:
φИКВ= φИКВ-Δχb. (36)
Затем вычисляются географические координаты летательного аппарата путем интегрирования угловых скоростей:
Вычисленные географические координаты, высота и составляющие скоростей летательного аппарата выдаются на выход 8 навигационной информации и передаются потребителям.
В случае неработоспособности спутниковой навигационной системы 2 (например, из-за неработоспособности спутников, наличия радиопомех и т.д.), о чем свидетельствует отсутствие сигнала исправности на выходе спутниковой навигационной системы 2, вычисление географических координат, высоты, составляющих скоростей и курса летательного аппарата производится на основании данных только инерциальной навигационной системы. Но при этом производится их корректировка с учетом данных, полученных от спутниковой навигационной системы 2 (до момента потери работоспособности спутниковой навигационной системой 2) и поправок, поступающих с вычислителя 7 поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
Предварительная оценка результатов эффективности использования изобретения в навигационном комплексе самолета-истребителя показала, что реализация изобретения позволяет уменьшить погрешности автономного инерциального счисления координат в полете в 3-4 раза, погрешности гирокомпасирования - на порядок.
Таким образом, предлагаемое изобретение обеспечивает повышение точности, отказоустойчивости и информативности навигационного комплекса летательного аппарата.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в навигационных системах летательных аппаратов: многофункциональных истребителей, вертолетов и т.п., что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Глобальная спутниковая радионавигационная система ГЛОНАСС. Под ред. В. Н. Харисова, А. И. Перова, В.А. Болдина. М.: ИПРЖР, 1998, с. 374, рис. 16.7.а.
2. Летные испытания пилотажно-навигационных комплексов самолетов и вертолетов. Е.Г. Харин и др. М.: Машиностроение, 1985, с. 46-49, 55-49.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| КОМБИНИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2224220C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОРТОВОЙ ИНДИКАТОР | 2000 |
|
RU2162204C1 |
Изобретение относится к навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей. Навигационный комплекс содержит инерциальную навигационную систему, спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы. Выход инерциальной навигационной системы соединен с первым входом навигационного вычислителя и первым входом регистратора. Выход спутниковой навигационной системы соединен со вторым входом вычислителя и вторым входом регистратора. Выход регистратора соединен с входом вычислителя погрешностей инерциальной системы, выход которого соединен с входом запоминающего устройства. Выход запоминающего устройства соединен с третьим входом навигационного вычислителя и входом вычислителя поправок к составляющим скорости и азимутальному углу гироплатформы, выход которого соединен с четвертым входом вычислителя. Обеспечивается повышение точности, отказоустойчивости и информативности. 1 ил.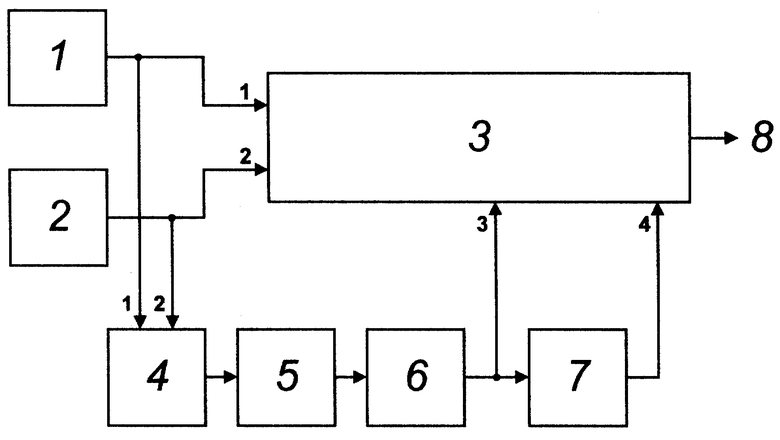
Навигационный комплекс летательного аппарата, содержащий инерциальную навигационную систему, спутниковую навигационную систему и навигационный вычислитель, отличающийся тем, что он дополнительно содержит регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы, при этом выход инерциальной навигационной системы соединен с первым входом навигационного вычислителя и первым входом регистратора навигационной информации, выход спутниковой навигационной системы соединен со вторым входом навигационного вычислителя и вторым входом регистратора навигационной информации, выход регистратора навигационной информации соединен с входом вычислителя погрешностей инерциальной навигационной системы, выход которого соединен с входом энергонезависимого запоминающего устройства, выход которого соединен с третьим входом навигационного вычислителя и входом вычислителя поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы, выход которого соединен с четвертым входом вычислителя, выход которого является выходом навигационной информации.
| Радиотелеграфная мачта | 1922 |
|
SU1530A1 |
| RU 2073210 С1, 10.02.1997 | |||
| Способ прикрепления лезвий к орудиям для обработки почвы | 1929 |
|
SU15604A1 |
| US 3630079, 28.12.1971. | |||

