Изобретение относится к пилотажно-навигационным комплексам (ПНК) летательных аппаратов (ЛА), в частности вертолетов.
Цель изобретения увеличение точности счисления координат и улучшение характеристик устойчивости летательного аппарата при отказах ДИСС.
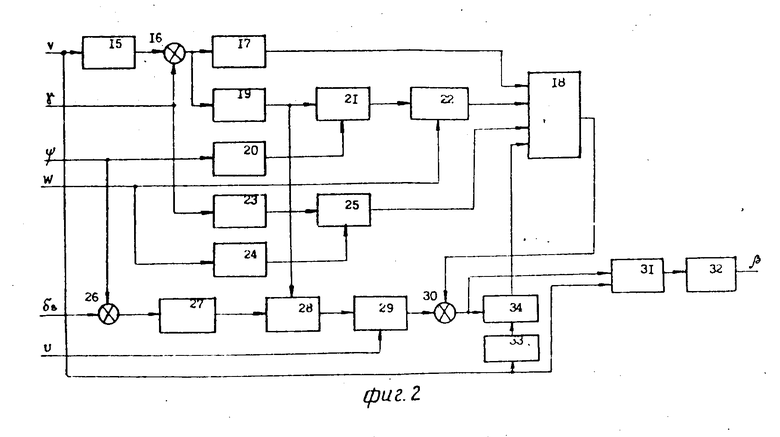
На фиг. 1 изображена блок-схема пилотажно-навигационного комплекса ЛА; на фиг. 2 функциональная схема блока вычисления угла скольжения и боковой составляющей воздушной скорости полета.
Пилотажно-навигационный комплекс состоит из допплеровского измерителя скорости 1, датчика воздушной скорости 2 и курсовой системы 3, выходы которых присоединены к входу блока вычисления проекций скорости 4, выход которого присое- динен как к входу блока вычисления модуля скорости 5, так и вместе с выходом датчика воздушной скорости и курсовой системы к входу блока вычисления параметров ветра 6, выходы которого присоединены как к входу блока вычисления проекции скорости, так и вместе с выходами курсовой системы, датчика воздушной скорости, блока вычисления модуля скорости и датчика угла крена 7 присоединены к входу блока вычисления угла скольжения 8, выход которого присоединен к входу блока вычисления параметров ветра 6 и входу блока вычисления проекций скорости 4, выходы которого присоединены к входу блока комплексной обработки информации 9; выходы датчика радиостанции ближней навигации (РСБН) 10, входящего в состав блока измерения азимута и дальности (БИАД) 11 присоединены к входу блока комплексной обработки информации 9, выходы которого присоединены к входу блока формирования программы управления траекторией 12, выходы которого, также как и выходы курсовой системы и датчика угла крена присоединены к входу блока формирования управления 13, сигналы которого также как и ветровые возмущения поступают на летательный аппарат 14, выходные параметры которого через соответствующие датчики являются входными сигналами устройства ПНК. Блок вычислений угла скольжения 8 состоит из блока вычисления балансировочного угла крена 15, выход которого, как и выход датчика угла крена, присоединяется к входу первого сумматора 16, выход которого присоединяется как к входу первого блока вычисления синуса 17, выход которого присоединен к первому входу интегросуммирующего блока 18, так и к входу блока вычисления косинуса 19, выход которого также как и выход первого блока дифференцирования 20, присоединен к входу первого блока умножения 21, выход которого присоединен к входу второго блока умножения 22, выход которого присоединен к второму входу интегросуммирующего блока 18; выход второго блока дифференцирования 23, также как и выход первого блока формирования аэродинамического коэффициента 24, присоединен к входу третьего блока умножения 25, выход которого присоединен к третьему входу интегросуммирующего блока 18; сигналы с датчиков курса и направления ветра присоединяются к входам третьего сумматора 26, выход которого присоединен к входу второго блока вычисления синуса 27, выход которого, также как и выход блока вычисления косинуса 19, присоединен к входам второго блока деления 28, выход которого, также как и входной сигнал модуля ветра, присоединены к входам четвертого блока умножения 29, выход которого, также как и выход интегросуммирующего блока 18, присоединен к входам второго сумматора 30, выход которого присоединен вместе с сигналом от датчика скорости к входам первого блока деления 31, выход которого присоединен к входу блока вычисления арксинуса 32, определяющего величину угла скольжения; выходы второго сумматора 30 и второго блока формирования аэродинамического коэффициента 33 присоединены к входам пятого блока умножения 34, выход которого присоединен к четвертому входу интегросуммирующего блока 18, определяющего боковую составляющую воздушной.
При работе предложенного комплекса по значениям составляющих скорости W от датчика 1, воздушной скорости V от датчика 2, угла курса Ψ от курсовой системы 3 и угла крена γ от МГВ 7 в вычислителе 8 из решения дифференциального уравнения, предcтавляющего динамичеcкую модель движения вертолета по оси OZ1, в интегросум- мирующем блоке 18
 )
) -
- включающего вычисляемые в блоках 24 и 33 коэффициенты а1(V), a2(V), в блоке 29 боковую составляющую модуля ветра, в блоке 23 dγ/dt, в блоке 20 dΨ/dt, в блоке 15 γбал(V), в интегросуммирующем блоке 18 определяется величина изменения боковой составляющей путевой скорости W21, и далее в блоке нелинейности 32 вычисляется угол скольжения
включающего вычисляемые в блоках 24 и 33 коэффициенты а1(V), a2(V), в блоке 29 боковую составляющую модуля ветра, в блоке 23 dγ/dt, в блоке 20 dΨ/dt, в блоке 15 γбал(V), в интегросуммирующем блоке 18 определяется величина изменения боковой составляющей путевой скорости W21, и далее в блоке нелинейности 32 вычисляется угол скольжения
β=βo+arcsin 
Таблично заданные динамические коэффициенты a1(V) и а2(V) аппроксимируются кусочно-линейно. Балансировочные значения γбал(V) аппроксимируются совокупностью кривых первого и второго порядков.
Боковая составляющая вектора скорости ветра вычисляется согласно выражению V
V
 где Vk-1, δk-1 параметры ветра, вычисленные на предыдущем шаге работы устройства.
где Vk-1, δk-1 параметры ветра, вычисленные на предыдущем шаге работы устройства.
При штатной работе пилотажно-навигационного комплекса (использующей информацию от ДИСС и КС) по значению составляющих путевой скорости в заданной системе координат W и W
и W , а также по значению угла скольжения β от вычислителя 8, воздушной скорости V от датчика 2, угла курса Ψ от датчика 3 в вычислителе 6 вычисляются параметры V и δв.
, а также по значению угла скольжения β от вычислителя 8, воздушной скорости V от датчика 2, угла курса Ψ от датчика 3 в вычислителе 6 вычисляются параметры V и δв.
Vx=Wxg-Vsin(Ψ-β);
Vy=Wyg-Vcos(Ψ-β) где
Wxg=W'x sin Ψ + W'z cos Ψ;
Wyg=W'x cos Ψ -W'z sin Ψ.
Модуль V и мгновенное направление ветра (значение метеорологического курса ветра) δв равны
V 
δв=arctg  + 180°
+ 180°
В случае отказа ДИСС и перехода на работу по сигналам ДВС сигналы W'x и W'z перестают поступать от блока 1 и составляющие путевой скорости начинают рассчитываться по величине воздушной скорости и запомненным составляющим скорости ветра
Vx=Vsin δв;
Vy=Vcos δв;
Wxg=Vx+Vsin ( Ψ-β);
Wyg=Vy+Vcos( Ψ-β).
Эти составляющие скорости поступают в блок 9, где счисляются координаты местоположения летательного аппарата Xg, Yg в прямоугольной системе координат, связанной с земной поверхностью.
Модуль скорости вычисляется в блоке 5 и равен W  (движение рас- сматривается в горизонтальной плоскости).
(движение рас- сматривается в горизонтальной плоскости).
Предложенный пилотажно-навигационный комплекс позволяет исключить эти ошибки благодаря вычислению значения боковой проекции воздушной скорости и далее угла скольжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1993 |
|
RU2077029C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ | 2014 |
|
RU2579551C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2009 |
|
RU2393429C1 |
| СПОСОБ ГРАДУИРОВКИ ДАТЧИКА АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2277698C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
Изобретение относится к пилотажно-навигационным комплексам летательных аппаратов. Цель изобретения - повышение точности счисления координат и улучшение характеристик устойчивости летательного аппарата при отказах допплеровского измерителя скорости. По данным о величинах углов курса и крена, модулей путевой 1, 4, 5 и воздушной скоростей 2 и данным о модуле и направлении ветра 16 в вычислителе 8 определяется приближенное значение величины угла скольжения, что существенно увеличивает точность счисления навигационных параметров. 1 з.п. ф-лы, 2 ил.
| Пилотажно-навигационный комплекс вертолета | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
